汽车ACC系统主观评价与客观评价的 相关性分析
2022-05-10 09:18:36张瑞环杜永利王星睿王海涛张云飞
汽车实用技术 2022年8期
张瑞环,王 淞,杜永利,王星睿,王海涛,张云飞
(北京汽车研究总院有限公司,北京 101300)
在汽车性能开发过程中,主客观评价是验证汽车性能好坏的主要手段。主观评价能够反映驾乘人员的实际感受,对市场口碑有重要影响;客观评价能够通过量化数据体现汽车实际情况,并能够通过设计方案进行直接调节。二者相辅相成,缺一不可,它们的关系一直是汽车领域的研究重点之一。
目前,国内外对于汽车主客观评价相关性的研究大多集中于动力性、驾驶性、操作稳定性等传统汽车性能。随着智能网联技术的不断发展,以自适应巡航控制(Adaptive Cruise Control, ACC)系统为代表的先进驾驶辅助系统(Advanced Driving Assistance System, ADAS)在汽车上的搭载率不断提升,对自适应巡航控制系统的主客观评价体系研究得到重视,并已有一定基础,但对ACC系统主客观评价指标的相关性研究较少涉及。
本研究采用来自于不同厂商的5台样车分别进行主客观评价试验,试验分别在无目标车行驶、跟车行驶和切入切出行驶三大典型使用场景下展开。考虑到样本量以及客观指标之间的内在联系,采用偏最小二乘回归方法(Partial Least Squares Regression, PLSR),对ACC系统主客观评价指标间的相关性进行分析。
1 主观评价试验
1.1 ACC主观评价架构
主观评价架构依据ACC功能的三大典型使用场景展开,分别是无目标车行驶、跟车行驶和切入切出行驶。为评价汽车ACC功能的车速控制表现,主观评价工程师分别对样车在三大场景下的加速段和减速段的综合表现进行评价。主观评价具体架构和指标权重如表1所示,主观评价指标权重依据模糊层次分析法(Fuzzy Analytic Hierarchy Process, FAHP)计算得出。本文参考美国SAE评分标准,主观评价采用十分制评分法,评分最小间隔为0.25分。
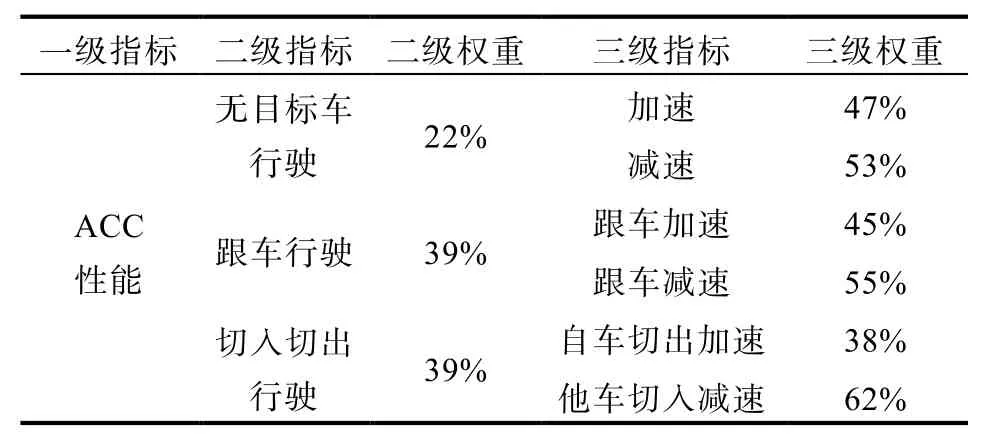
表1 ACC系统主观评价架构与指标权重
1.2 主观评价一致性分析
为排除人为因素和偶发问题干扰,保证主观评价结果的可信度,由四名经验丰富的主观评价工程师对试验车辆进行评价,并采用斯皮尔曼等级相关系数对评价结果进行一致性验证,剔除不一致主观评价数据。斯皮尔曼等级相关系数是衡量两个变量相关程度的非参数指标,取值在-1到+1之间。对于样本容量为的评价结果,首先对评分结果进行排序,然后根据式(1)计算两两工程师的斯皮尔曼等级相关系数。
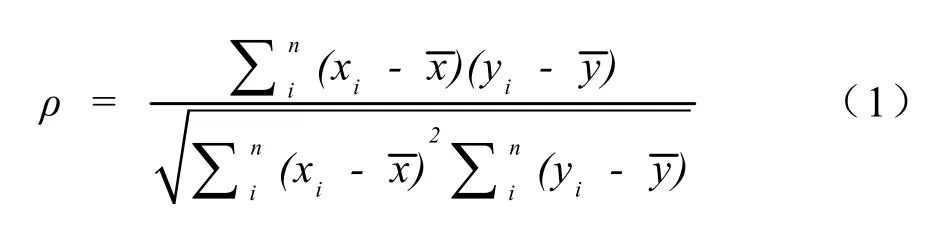
其中,、分别为两名工程师给出的分数排序,为评价样车数量。
分别计算主观评价三级指标评分的斯皮尔曼等级相关系数后,对不一致的数据进行剔除,取剩余评分数据的算术平均值作为最终评价结果。以跟车加速指标评价为例,主观评价数据以及评分排名情况如表2所示。根据式(1)计算得到的斯皮尔曼等级相关系数矩阵见表3。结果表明,工程师C与其他三位工程师的斯皮尔曼等级相关系数明显较低,数值均在0.6以下,表明工程师C的评价结果与其他三人评价结果差异较大,应把工程师C的数据剔除。取剩余三名工程师的评价进行算术平均,得到5台样车跟车加速指标的评分分别为7.83、7.58、7.17、7.50、7.42。
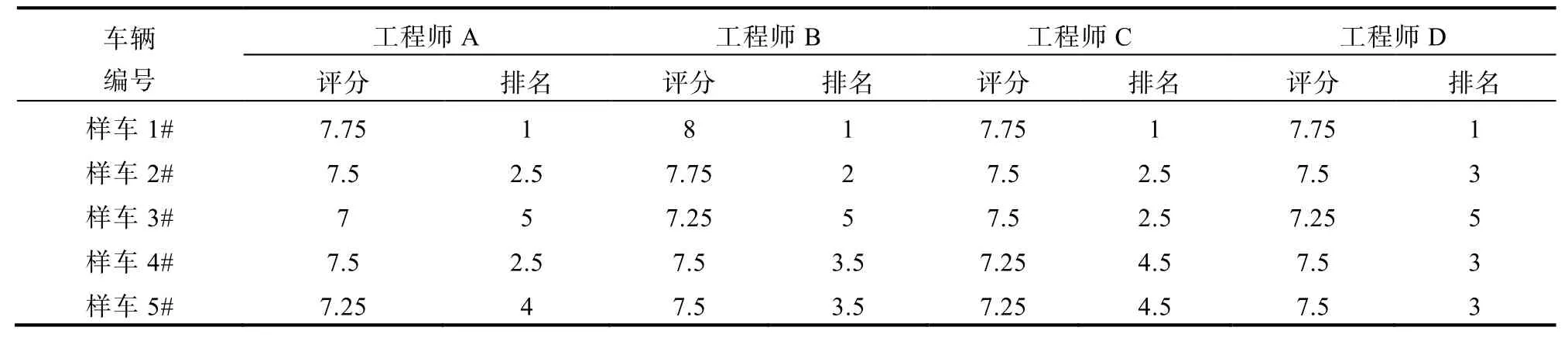
表2 跟车加速指标主观评价结果
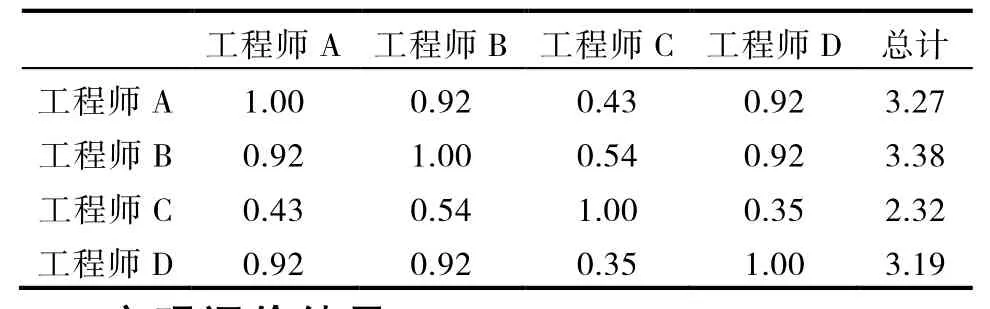
表3 斯皮尔曼等级相关系数矩阵
1.3 主观评价结果
对5台样车进行主观评价,剔除不一致数据,根据指标权重得到上级指标评分,最终的主观评 价结果如图1所示。从整体来看,5台车的表现呈阶梯状分布,其中样车1#评分最高,超过7.75分。五台样车一级指标平均分为7.43,样车3#略高于平均分,样车4#和样车5#低于平均分,与其他三台样车差距较大。
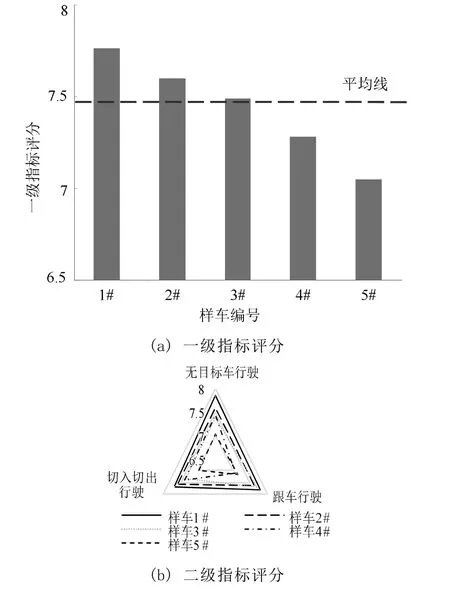
图1 ACC系统主观评价结果
二级指标方面,样车1#在三项指标均排名第一,其他车辆在三项的表现互有交叉。样车5#表现较差,仅在跟车行驶的表现略好于样车4#。
2 客观评价试验
2.1 客观试验条件
客观测试工况和操作与主观评价保持一致,分别在无目标车行驶、跟车行驶、切入切出行驶三大场景下进行测试,道路为长直道,不涉及弯道行驶。无目标车行驶分为加速、匀速和减速工况;跟车行驶分为跟车加速、跟车匀速和跟车减速工况;切入切除行驶分为自车匀速、自车切出加速和他车切入减速工况。
测试车辆ACC系统速度最高设定为60 km/h,跟车距离设定为中档。测试车辆的纵向速度变化全部由ACC系统控制完成,试验人员负责巡航速度设定和横向控制。采用RT3000组合惯导、RT Range通信模块等设备分别记录测试车辆与目标车速度、加速度、纵向距离、横向距离等信号。为保证测量精度,每次试验重复进行三次。
2.2 客观试验指标
根据主观评价指标,并参考ISO 22179等相关标准,共确定23项对应的客观评价指标,如表4所示。采用Python语言编辑器PyCharm软件,编写相关程序,完成采集信号的后处理工作,并提取所需客观评价指标数值。
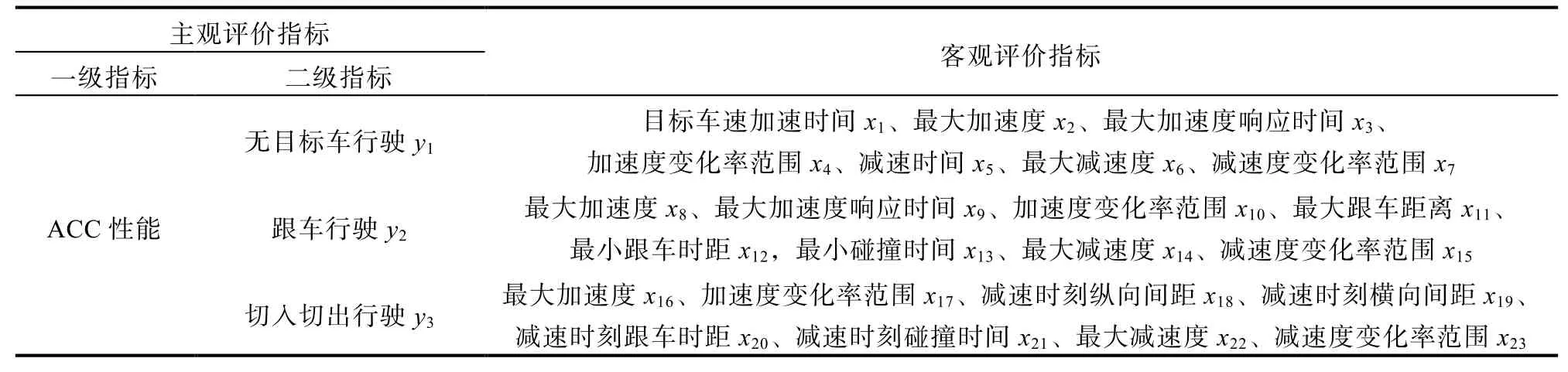
表4 ACC系统主观评价指标对应的客观评价指标
3 主客观评价指标相关性分析
3.1 主客观指标回归模型
PLSR方法将主成分分析、线性回归和典型相关分析有机结合起来,在处理小样本多重共线性数据方面有独特优势。基于本研究的样本量以及客观指标间的内在关联,采用PLSR方法建立主客观对应模型。根据表4的主客观指标对应关系,分别建立无目标车行驶、跟车行驶、切入切出行驶三个场景下的回归模型。变量投影重要性指标(Variable Influence on Projection, VIP)值表示自 变量对因变量的解释能力,可用其筛选影响主观评价的关键客观指标。值可根据如下公式进行计算。

其中,为自变量总数;为模型能解释的总方差和;SSY为第个因子解释因变量的方差和;为模型因子数;为PLSR方法中的权重向量。
3.2 结果与讨论
表5给出了采用PLSR方法得到的三个回归方程具体参数。三个回归方程的主成分因子数在四个以内,拟合决定系数均在0.9以上。跟车行驶场景下的最高,达到0.98,以上表明主客观指标间具有显著的相关性。

表5 主观指标与客观指标的偏最小二乘回归结果
从图2中可以直观看到,三大场景下的回归方程相对误差均在2%以内,满足了主观评价分数的预测精度要求。其中无目标车行驶的总体相对误差较大,最大相对误差为1.98%,平均相对误差为0.84%。
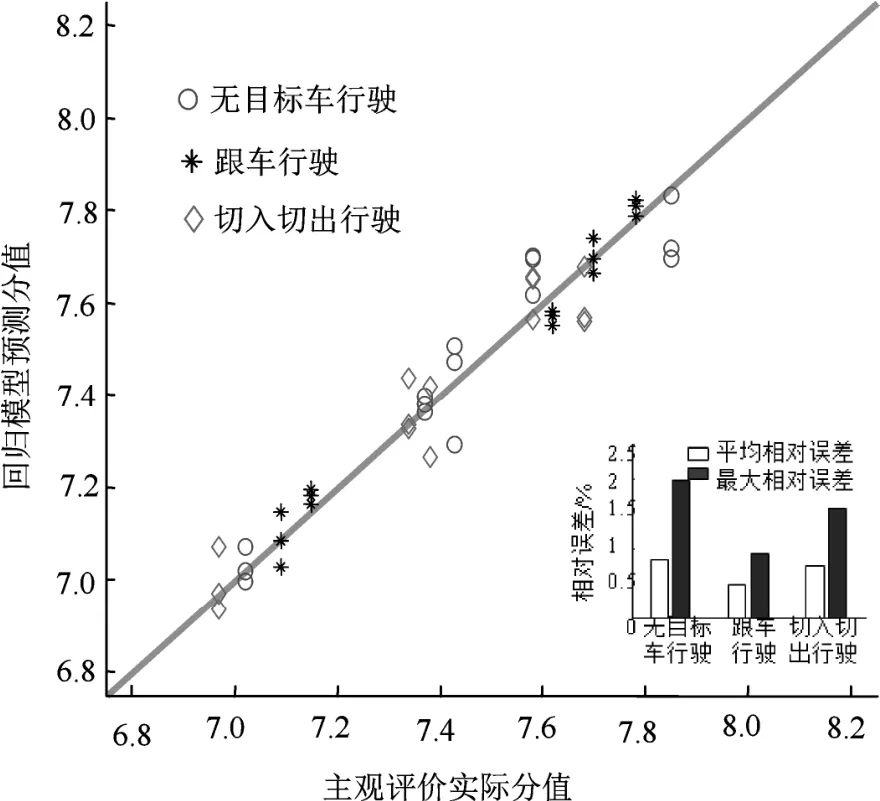
图2 偏最小二乘回归模型预测结果
计算得到的客观指标值如图3所示,值大于1的指标被认定为关键客观指标。最终筛选出对主观评价结果具有重要影响的关键指标10项。
无目标车行驶场景下值大于1的关键指标为最大加速度、加速度变化率范围和最大减速度,说明车内人员在此场景下对车辆动力性、制动性,以及舒适性更为关注。跟车行驶时,关键客观指标为最大加速度、加速度变化率范围、最小碰撞时间和减速度变化率范围。切入切出行驶时,关键客观指标为加速度变化率范围、减速时刻碰撞时间和减速度变化率范围。碰撞时间表示主车与目标车保持在当前相对速度下,后车碰撞前车所需时间。通过对三大用车场景下的关键客观指标对比发现,在道路 上有目标车介入的情况下,碰撞时间指标对主观感受的影响较大,说明车内乘客对安全性的关注度上升。
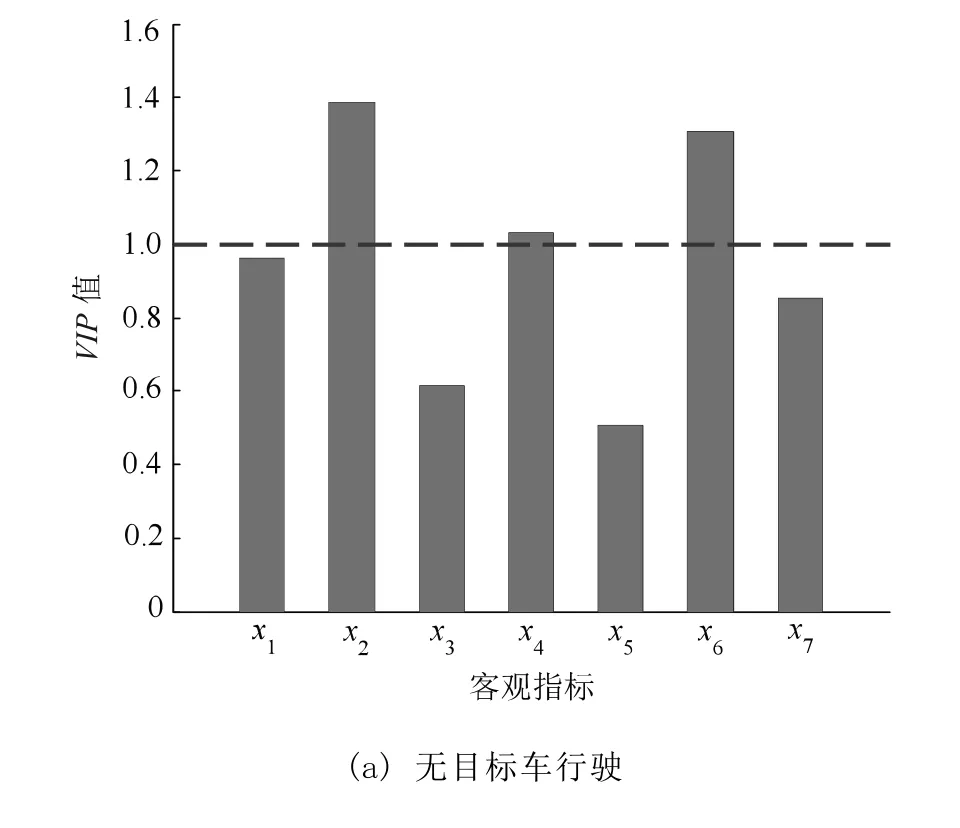

图3 ACC系统关键客观指标筛选结果
4 结论
采用PLSR方法,对汽车ACC系统的主客观指标对应关系进行了研究。对5辆车分别进行主观评价和客观测试,得到主客观指标相关数据。建立了三大用车场景下的主客观指标回归方程,并进一步筛选出10项对主观评价指标影响较大的关键客观指标,结论如下:
(1)建立的回归方程拟合决定系数均在0.9以上,且相对误差在2%以内,可用于主观评价分数预测,对于主机厂ACC系统开发参数设定具有指导意义。
(2)从筛选出的关键客观指标来看,无目标 车情况下,车内人员关注车辆的动力性、制动性以及过程中的舒适性;而在有目标车出现时,关键客观指标中增加碰撞时间,表明对于安全性的关注明显提升。分析结果可用于不同场景下,对ACC功能的针对性调校。
未来将进一步积累样本量,以不断优化更新模型,并尝试采用非线性(支持向量机,神经网络等)建模方法探究主客观指标间的关系。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31 07:01:16
车主之友(2022年4期)2022-08-27 00:58:12
汽车实用技术(2022年10期)2022-06-09 11:16:54
中共云南省委党校学报(2022年1期)2022-04-26 13:55:44
小学生优秀作文(低年级)(2020年4期)2020-07-24 08:31:16
经济技术协作信息(2020年30期)2020-02-28 17:32:10
法律方法(2018年2期)2018-07-13 03:22:06
中国神经再生研究(英文版)(2017年3期)2017-01-11 20:14:02
中国铁道科学(2015年2期)2015-06-26 08:34:56
韩国语教学与研究(2014年3期)2014-10-17 01:38:04