
基于机器学习的电力巡检机器人避障路径规划
2022-05-06 13:32郭瑜倪旭明
电子设计工程 2022年8期
郭瑜,倪旭明
(国网金华供电公司,浙江金华 321001)
目前,随着科技的发展,维护电网安全的方式也开始从传统的人工巡检向智能化、无人化发展,电力巡检机器人是电力领域发展的垫脚石,对于智能化电网的发展有促进作用。随着我国经济的快速发展,电力系统所承载的工作量也越来越多,导致电力系统人工巡检工作者的工作任务量严重超出正常工作量,并且电力系统运输量的提高,致使运输的电压也不断提高,为此在电力安全维护领域下将用电力巡检机器人代替电力人工巡检[1-2]。
传统的电力巡检机器人由于技术不成熟,在巡检过程中会与电力设备出现碰撞,而发生电力巡检事故,对于电力巡检机器人和电力系统都存在损失,因此,文中提出基于机器学习的电力巡检机器人避障路径规划方法,达到巡检机器人安全巡检的目的。
1 电力巡检机器人路线三维模型建立
文中设计电力巡检机器人路线三维模型的目标是既可以保证电力巡检机器人稳定巡检,又可以使电力巡检机器人具有辨识感知巡检路径方向感的功能,可以全方面完成巡检任务的巡检路径规划[3-4]。为了提高巡检机器人巡检的稳定性,根据物理原则在电力巡检机器人的底端设计4 个交叉的驱动轮,驱动轮的运动方向和周期相同,具体物理电力巡检机器人三维模型如图1 所示。
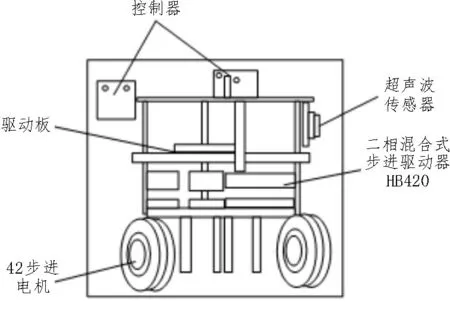
图1 电力巡检机器人三维模型
电力巡检机器人对于方向的感知十分重要,一旦机器人的方向感知能力降低,会导致电力巡检机器人的巡检路线偏离正规的巡检路线,可能会与其他电子系统的巡检障碍物或者设备相互碰撞,造成电力巡检失误。为了解决以上问题,文中利用运动模型和地势强度建立电力巡检机器人路线三维模型,使电力机器人重心的感知角度最佳,为此,文中选择电力机器人质心作为模型的中心原点,电力巡检机器人二维坐标系示意图如图2 所示。
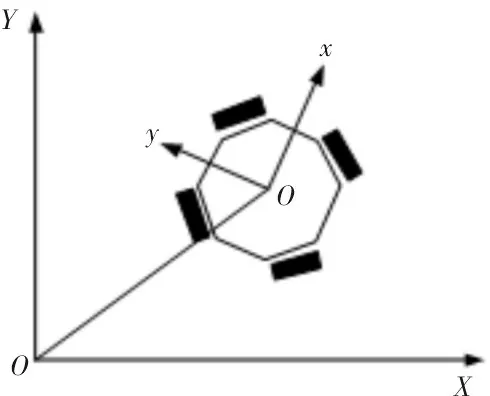
图2 电力巡检机器人三维模型坐标系
模拟电力巡检机器运动行为,首先设定巡检机器人的4 个驱动轮的方向向量为P,然后结合实时环境状态,首先计算出机器人在巡检范围内的相对位置,计算公式如下所示:

其中,PB表示机器人巡检起始位置;x(t)表示巡检机器人X轴的方向导向系数;y(t)表示巡检机器人Y轴的方向导向系数;L表示巡检机器人驱动轮的半径;∏表示电力巡检机器人的坐标;Q表示巡检机器人运行的自由度;Pn表示巡检机器人驱动轮的运动方向向量。Wx和Wy分别表示电力巡检机器人路线三维模型的X轴和Y轴的权重矩阵[5-8]。
电力巡检机器人在巡检过程中会进行基本的巡检行为操作,比如直行、拐弯、倒退、平移、转圈,为了提高电力巡检机器人运行的平滑性,文中利用合力平衡定理,在机器人巡检过程中,对机器人巡检运动行为进行制约。电力巡检机器人转圈运动路线规划示意图如图3 所示,公式如下所示:
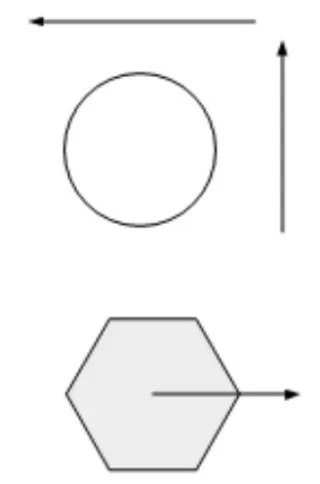
图3 电力巡检机器人转圈路线示意图

其中,f7表示电力巡检机器人运动的斥力;F表示电力巡检机器人运动的合力;Fx2、Fy2分别表示电力巡检机器人运动在X轴和Y轴的运动分量;ε表示机器人运动平衡系数[9-10]。
2 机器人避障路径规划
机器学习技术被广泛地应用于家庭服务、工业指导、军事作业等多个领域,机器学习分为单机机器学习技术和多机机器学习技术两种类型,根据机器学习面向对象的难度,选择最佳的机器学习方法。单机机器学习技术相对于多机机器学习技术的应用范围少,根据文中设计的电力巡检机器人避障路径规划方法,文中选择多机机器学习技术,该技术通过对环境的学习可以完成静态和动态两种不同路径的规划,并且在路径规划过程中具有自我校验的流程,避免规划路径存在冗余问题[11-12]。
电力巡检机器人确定好自身存在的位置,根据控制中心发送的巡检任务,规划电力巡检机器人需要巡检的具体路径。规划过程中利用斥力函数确定巡检的有效范围,通过人工势场的方法将巡检范围内存在的障碍物进行标记[13-14]。障碍物标记的原理是存在障碍物位置的人工势场结合实时环境的场强,会向外发散出一个斥力,斥力影响巡检目标对巡检机器人路线的引力,电力巡检机器人则通过引力的大小判断巡检障碍物的具体位置。斥力函数如下所示:

其中,Ut表示斥力函数;O表示巡检机器人与障碍物的相对距离;k1表示系数。
电力巡检机器人识别到巡检的有效范围和巡检障碍物后,可以初次完成电力巡检机器人避障路线的规划,此次路线规划将存在障碍物的可巡检路线舍去,但是如果全部路线都存在障碍物,那么就要启动电力巡检机器人的避障功能。文中通过DWA 滑动窗口方法,驱使电力巡检机器人在运行过程中避开障碍物,稳定地完成巡检工作,避障运动行为生成公式如下所示:

其中,y(h) 表示电力巡检机器人避障指令;Vb表示电力巡检机器人的角速度;Vs表示电力巡检机器人运动的线速度;Va表示电力巡检机器人运动的加速度;Δt表示巡检机器人巡检周期;αdpath表示巡检机器人与障碍物的最短距离;βdgoal表示从轨迹终点到局部目标的距离;γdobstcle表示电力巡检机器人运行轨迹的最大障碍代价[15-16]。
利用模糊支持向量模型设定路径规划约束,根据文中研究目标,设定路径规划约束为巡检范围最大和巡检路径最短,可以提高电力巡检机器人避障路线规划的效率。约束条件的公式如下所示:

其中,D表示约束条件模型;c1、c2表示模糊支持向量机模型上界和下界决策函数的均值;ai表示模糊控制算法的隶属度;minL表示巡检最小路径;f(k)表示电力巡检机器人巡检概率核函数,其他未知数的意义同上。
最终调用机器学习技术、巡检规划路径约束条件、避障运动行为指令,完成电力机器人巡检行走路径规划,规划公式如下所示:

其中,s(t) 表示电力巡检机器人的巡检路径;Q(x,y,z)表示巡检行为分类的特征向量;μ表示路径规划系数;ω表示高维特征空间向量的内积;f(x,y,z)表示路径优化的损失函数。电力巡检机器人路径选择示意图如图4 所示。

图4 电力巡检机器人路径选取示意图
3 仿真实验分析
通过以上分析与设计,完成了基于机器学习的电力巡检机器人避障路径规划方法的设计,为了检验该方法的工作性能,文中借助基于GPS 导航技术的电力巡检机器人避障路径规划方法(传统方法1)和基于无载波通信技术的电力巡检机器人避障路径规划方法(传统方法2)共同完成对比实验测试,保证测试的科学性。为了提高测试结果的可信度和可分析性,文中测试的巡检机器人都是型号为HKD09 系列的巡检机器人,该系列巡检机器人的驱动器、电机以及其他配件的功能是最佳的,不会导致实验因为巡检机器人而终止。实验测试机器人行走的路线包括直行、拐弯、转圈、倒退、平移5 项基本巡检动作,为了保证实验测试的难度,文中设置的避障物分别为20 个基本障碍物和10 个复杂障碍物,随机混合在巡检机器人巡检测试的路径范围内。实验前,将3个巡检机器人分别录入3 个电力巡检机器人避障路径规划方法,选择同一时间,向电力巡检机器人发送巡检任务,然后开始试验,当所有巡检机器到达巡检任务出口时,停止实验测试,整理实验场地和实验数据,进行实验数据分析。
巡检机器人在实际场景下的轨迹图如图5所示。

图5 巡检机器人在实际场景下的轨迹图
具体的巡检机器人避开障碍物数量测试和巡检机器人巡范围测试结果如图6、图7 所示。
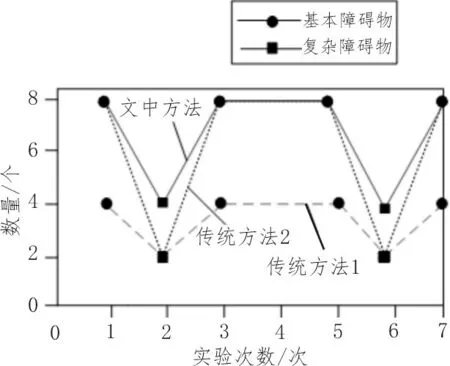
图6 测试巡检机器人避开障碍物数量的结果图
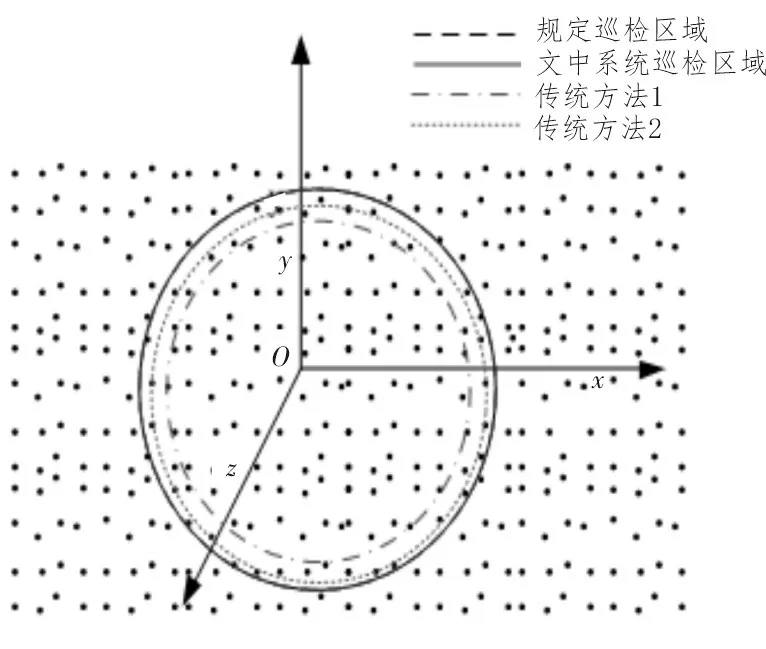
图7 测试巡检机器人巡检范围结果图
通过观察图6 中的实验结果,可以直观地观察到,3 个电力巡检机器人都可以对基本障碍物进行避让,但是避障的数据不同,文中设计的基于机器学习的电力巡检机器人避障路径规划方法可以成功避障8 个基本障碍物、4 个复杂障碍物;传统方法1 可以避障4 个基本障碍物、两个复杂障碍物;传统方法2 可以成功避开8 个基本障碍两个复杂障碍物。文中设计的基于机器学习的电力巡检机器人避障路径规划方法成功地全部避开基本障碍物,主要的原因是基于模糊控制算法可以有效地保证机器人在巡检过程中的行为波动不触碰到障碍物,并且机器学习技术可以在路线规划前,有效地检测到巡检范围内的所有障碍物,减少巡检机器人与障碍的碰撞。复杂障碍物的存在感知小、避障难度大,但是基于机器学习的电力巡检机器人避障路径规划成功避开了80%的复杂障碍物,具有高性能的避让功能。
通过观察图7 中的实验结果,可以得到文中设计的电力巡检机器人避障路径规划方法对于发布的巡检任务巡检有效范围达到了100%,传统避障路径规划方法1 的巡检有效范围为89%,传统避障路径规划方法2 的巡检有效范围为93%。得到这一结果主要是因为文中建立的三维路径规划模型和地势算法,保证了巡检机器人的巡检范围。
综上所述,文中设计的电力巡检机器人避障路径规划方法的避障数量比传统的方法避障数量多,并且巡检效果好,可以实现无误差的巡检,具有较高的工作效率。
4 结束语
利用试验测试证明了基于机器学习的电力巡检机器人避障路径规划方法的避障性能和规划功能的可行性。基于模糊控制算法从根本上提高了电力巡检机器人避障路径的方向辨认感知能力,并控制机器人在进行转弯行为时,转动误差最小化。利用运动模型和势场定理提高巡检机器人对路径的合理规划能力,使得输出的规划路线避障物最少,巡检有效范围最广。机器学习算法提高了电力巡检机器人对于巡检路径规划的自学习性和智能性,使得巡检机器人可以达到安全巡检的目的。相信通过文中的设计,可以提高电力巡检机器人巡检的工作效率,降低巡检机器人碰撞电力事故的发生率,促进电力巡检智能化发展。
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
电影(2018年8期)2018-09-21
小学生导刊(低年级)(2016年8期)2016-09-24
