基于Agent的指挥控制系统设计
2022-05-01 12:55何兆龙靳锴何文志
计算机与网络 2022年5期
何兆龙 靳锴 何文志
摘要:针对现有智能无人系统构成复杂、运作流程繁琐,难以合理高效地实现各部分功能、协调各分系统工作的问题,建立了完善的指挥控制系统,对整个系统进行指挥控制与辅助决策。对智能无人系统指挥控制的概念与需求分别进行了建模与分析,结合信息化发展带来的网络中心战概念,提出了信息时代的指挥控制系统网络中心结构,并结合智能Agent技术设计了指挥控制系统,通过再入投送系统仿真验证了指挥控制系统的有效性。
关键词:指挥控制系统;网络中心战;智能体;再入投送
中图分类号:TP391文献标志码:A文章编号:1008-1739(2022)05-50-4
0引言
指挥控制系统是以计算机为核心、多种技术设备为辅,由指挥人员构成的指挥层,能够对任务部队及主战武器装备实施指挥控制,实现全时全域的动态高效控制。
在指挥控制系统理论方面,大量专家学者开展了广泛深入的研究。Drillings[1]、Pascual[2]和Klein[3]针对自然指挥控制决策问题展开了研究,以空军作战为背景,通过自然决策的方法解决了可视化困难与战场条件变化情况下给出实时命令的问题。Sarter[4]针对高风险区域,在规定时间、信息不确定的情况下对指挥控制决策的问题展开研究,对2种不同的决策信息支持系统的有限性进行了讨论。唐立军[5]研究了有关网络中心战的概念与特点,提出了应用信息化带来的便利条件,构建了以网络为中心的指挥控制决策系统,替代了以平台为中心的传统设计方式,适应了系统现代化发展的趋势与要求。李奎[6]对地面武器机器人的指挥控制需求进行了全面的分析,根据研究对象特点构建了适应任务的指挥控制系统结构,依据任务需求,定义了辅助决策概念,设计了辅助决策系统。
针对现有指挥控制系统的不足,开展Agent指挥控制系统设计研究,提出了基于Agent的指挥控制辅助决策系统。
1网络中心指挥控制系统结构设计
网络中心战并不是关于互联网的战争,而是以网络技术为基础,包含信息领域的各种技术,是一种指挥控制理念。随着信息技术的发展,各种应用系统从平台中心化向网络中心化过渡。以往主要是围绕平台执行任务,在行动过程中,各平台自行获取信息,通过决策系统进行决策,最终由指挥控制系统实现任务。而随着网络应用技术发展,由相互联接的通信、指挥、控制系统构成的网络也有了长足进步,将平台中心转移至网络中心成为了实现高效指挥控制决策的有效方法。
1.1网络中心战网格设计
为实现网络中心战的强大优势,建立其网格体系结构,按功能可以把智能无人系统的整个网络分为3个互相连接的部分:以通信为基础的信息网格、以传感器为基础的传感器网格和以平台为基础的平台网格。其中信息网格以各种软件为主,包括各种计算、优化、策略软件等;传感器网格与投送网格属于硬件设施,其中传感器网格包括各种通信、控制设备;平台网格主要包括轨道平台。网格体系结构如图1所示。
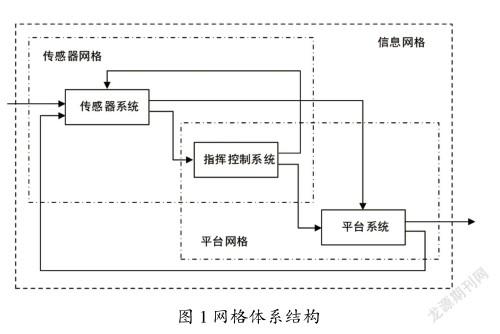
所有探测装置诸如卫星、侦察机、舰艇和雷达等共同组成了传感器网格,各系统之间相互配合相互支持。与此同时,平台网格能够充分使用传感器网格获得的信息,通过自身的决策技术对信息进行有效处理,从而进行有效的投送任务。信息网格则为传感器网格和平台网格提供链接支撑,实现2个网格之间的信息传递。
1.2网络中心战映射域设计
网络中心战的整个概念框架可以映射到3个领域:物理领域、信息领域和认知领域,网络中心战映射如图2所示。
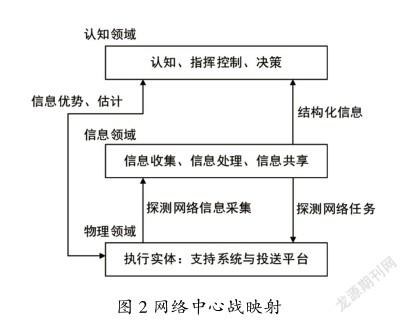
物理领域是包括所有硬件在内的系统,这里主要是指智能无人平台与各种支持系统。信息领域包括与通信有关的一切内容,主要涵盖信息收集、处理、共享。认知领域是所有算法、策略、优化的总和,是决策过程的核心内容。
2基于Agent的辅助决策
2.1 Agent技术
Agent技术属于人工智能技术,是一种与其周围环境进行交互的、自主运行的实体。其主要特点是自主性和协作性。Agent具有独立于其他实体并自主行动的能力,能将推理与知识相结合。将Agent技术用于智能无人系统的指挥控制,能满足快速性与多平台协调性的需求。Agent的典型抽象视图如图3所示。

2.2 Agent辅助决策设计
2.2.1指挥决策Agent的提出
指挥控制系统辅助决策是通过传感器得到数据,经过算法、策略以及优化实现任务,同时,对照规则和制约条件,提出相应的方案供选择。每一个决策过程中,需要根据平台本身的性能、目标信息、任务需求等进行决策。而Agent具有的特点满足了辅助决策需求,因此提出基于Agent理论及方法的辅助决策概念。
2.2.2基于Agent的决策结构
根据智能无人系统的特点,结合Agent辅助决策技术,Agent决策结构如图4所示,图中每个虚线框都是一个Agent结构,所以整个决策Agent也就是一个由多Agent共同構成的结构。
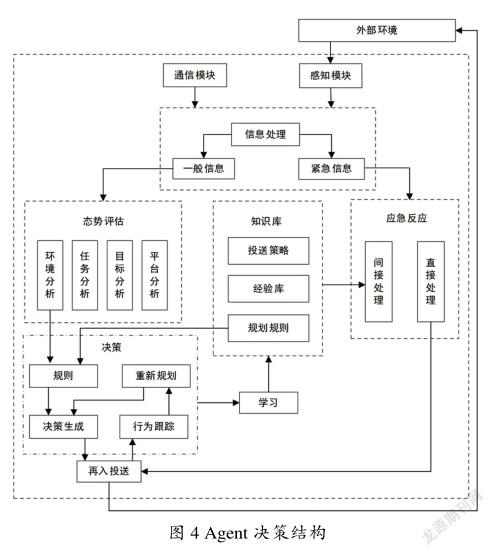
决策Agent的工作原理和过程为:
①通信模块和感知模块:通信模块主要负责平台与外部通信联络,如与监测系统信息交互、指挥命令下达等;而感知模块主要是感知外部环境变化,并将结果传送给信息处理模块。
②信息处理模块:接收来自感知模块及通信模块的信息,包括环境信息、系统自身信息,然后将其进行处理,实现对决策模块的支撑。在特殊情况下可以采用应急模块进行处理。
③态势评估模块:收到从信息处理模块传来的信息,并结合已有知识库,进行环境分析(天气情况、地形分析)、任务分析等,并将结果送入决策模块。
④决策模块:决策Agent的核心,通过任务规划生成任务决策,通过指挥控制进行执行。针对不同平台、具体的任务规划与决策功能,可采用不同的智能算法与优化算法进行有效求解。
⑤应急反应模块:平台功能有限,任务千变万化,当目标出现特殊情况后,需要应急反应模块进行处理,将应急反应模块单独列出。
⑥知识库:进行决策的知识来源,包括地球、大气模型、平台信息、地理情况和气候环境等,还包括任务规则、策略、优化知识库。
3再入投送平台指挥控制系统设计与仿真
再入投送平台是一个复杂的系统,投送飞行器平时部署于卫星轨道平台,执行任务时通过轨道机动与再入机动,实现高超声速精确对地投送。一旦平台部署完成,在执行对确定目标点的投送任务时,面临复杂的指挥控制问题。投送系统是由多个轨道面构成,而每一个轨道面又是由多个平台构成,可能会存在同一时间有多个平台都可执行投送任务,但是实现投送任务的代价与完成效率并不相同,针对该问题采用本文提出的基于Agent的指挥控制系统进行决策。
3.1再入投送任务
3.1.1平臺部署
为实现全球区域覆盖,卫星平台部署采用双倾角条带覆盖设计,采用轨道倾角为69.81°的3条大倾角轨道和轨道倾角为43.62°的3条小倾角轨道,每个轨道面内均匀分布6个平台,双倾角条带覆盖轨道参数如表1所示。

同时,平台搭载再入飞行器,最大横程机动地心角为20°,最大纵程机动地心角为120°,全球覆盖纬度区域为80°,重点覆盖纬度区域为40°。
3.1.2任务描述
轨道平台系统正常工作。在0=0.00 s时刻,西经90°、北纬40°出现威胁目标T,此时平台星下点经纬度(东经、北纬为正)以及速度方向(由南至北为1)参数如表2所示。

3.2再入投送指挥控制系统设计
本文采用基于Agent的指挥控制系统设计方法,投送流程图如图5所示,描述再入系统在执行任务过程中的主要工作,给出整个系统的运行过程与节点。系统主要任务包括目标区域监测、通信、任务规划、平台分配、飞行器制导与控制、投送效果评估等。
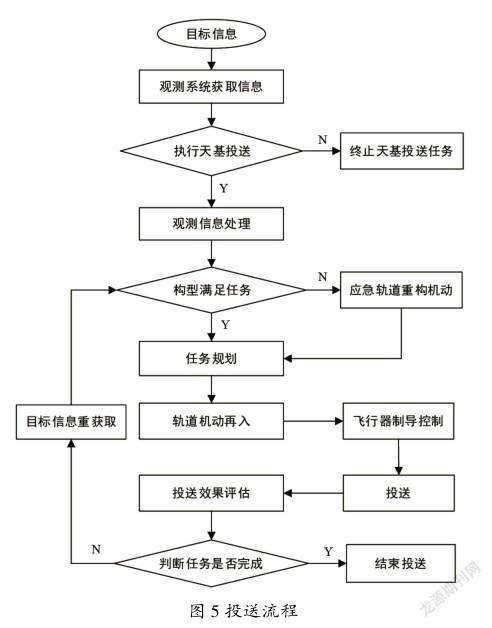
当覆盖区域出现投送任务时,网络中心下的所有观测系统对目标区域进行信息获取与反馈。对收集的信息进行处理,并将信息发送给指挥人员,由其决定是否采用再入投送系统进行投送。当决定采用再入系统进行投送,则由任务优化Agent完成满足提前预设最优指标的任务规划,从而选取合适平台进行离轨机动,完成最优过渡轨道,到达最优再入点。飞行器进入大气层内,通过大气层内机动实现最优再入轨迹与制导,直到到达目标。最后,再次通过观测系统进行投送任务完成效果评估,如果满足要求则投送任务完成,如若不满足任务要求,则需要再一次进行投送任务。
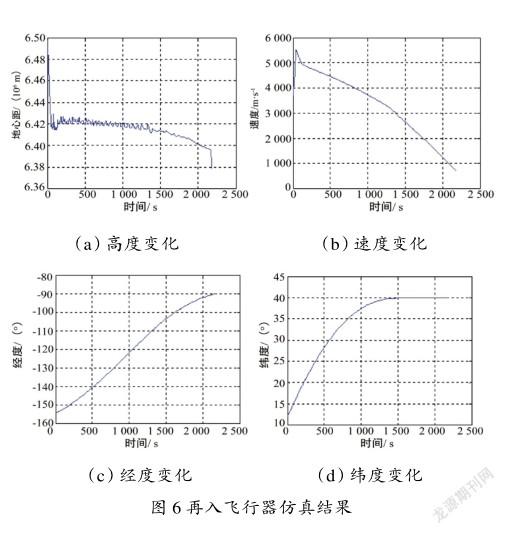
投送任务过程中再入飞行器仿真结果如图6所示,包括再入过程中高度、速度、经度和纬度变化曲线。
4结束语
本文针对智能无人平台指挥控制系统设计开展了研究。首先,对指挥控制决策的概念进行了阐述,对研究对象进行了需求分析。然后,介绍了网络中心战的概念,提出了信息时代的指挥控制决策系统的特点,从信息角度建立了指挥控制决策系统框架。接着,针对此类系统的任务特点,选择采用智能Agent技术实现指挥控制决策。在对智能Agent技术进行了介绍后,将智能Agent辅助决策技术引入决策系统进行完善,保证指挥控制决策的快速性、协调性。然后,结合系统与任务特点设计了投送系统空间概念图与投送流程图,对整个系统的任务过程从时间与空间上进行了描述和分析。最后,针对一个特定点的投送任务进行仿真,验证了本文方法的有效性。
参考文献
[1] DRILLINGS M, SERFATY D. Naturalistic Decision Making in Command and Control[J]. Naturalistic Decision Making, 1997:71-80.
[2] PASCUAL R, HENDERSON S. Evidence of Naturalistic Decision Making in Military Command and Control[J]. Naturalistic Decision Making, 1997:217-226.
[3] KLEIN G. Naturalistic Decision Making [J]. Journal of the Human Factors and Ergonomics Society,2008,50(3):456-460.
[4] SARTER N B, SCHROEDER B. Supporting Decision Making and Action Selection under Time Pressure and Uncertainty: the Case of In-flight Icing [J]. Journal of the Human Factors and Ergonomics Society, 2001,43(4):573-583.
[5]唐立军.网络中心战下指挥控制决策系统研究[D].太原:中北大学,2008.
[6]李奎.地面武器平台指挥控制系统设计及实现[D].南京:南京理工大学,2008.