基于QZSS L1信号的岸基GNSS-R码延迟海面测高
2022-04-29 06:37:46储倜贺凯飞高凡贺匀峤孟馨悦徐天河
北京航空航天大学学报 2022年4期
储倜,贺凯飞,高凡,贺匀峤,孟馨悦,徐天河
(1.中国石油大学(华东)海洋与空间信息学院,青岛 266580; 2.山东大学空间科学研究院,威海 264209;3.山东大学空间科学与物理学院,威海 264209)
GNSS-R(global navigation satellite system-reflectometry)海面测高作为一项新兴的对地观测技术,主要优势在于能够对海面以较低成本进行高时空分辨率的观测,以期在海啸预警、海平面上升研究等领域发挥重要作用。双天线GNSS-R测高是通过测量直射信号与反射信号之间的路径差,从而获取反射天线到海面的垂直高度,并结合GNSS定位信息,反演得到海面测高结果。其路径差可以通过载波相位[1]和码相位延迟[2]2种方式获取。文献[1,3-9]分析了基于GPS L1/L2频段的载波相位延迟测高结果,但在海面波动较大的情况下,接收机无法稳定跟踪反射载波相位信号。文献[2,10-14]分析了基于GPS L1C/A码和BDS B1I码的海面测高结果,但GPS L1C/A码和BDS B1I码调制方式简单且带宽较窄,制约了其GNSS-R测高精度。
近年来,GNSS信号编码结构和调制方式不断升级,出现了多种抗多径性能更优、精度更高的民用测距码。文献[15]分析了更高码率的GPS L5码和GALILEO E5码的信号特性及可能获得的测高精度,而L1C码作为新一代GPS高精度民用码,采用了BOC调制方式,可使其有效提高测距精度及抗多路径能力[16]。目前,GPS系统仅在BLOCK III卫星上播发L1C信号,且BLOCK III在轨卫星仅有3颗,其卫星信号难以覆盖中国东部沿海区域。QZSS系统作为GPS在亚太地区的增强系统,在L1频段上调制有L1C码和传统的L1C/A码[17],而在中国东部沿海区域均可接收来自QZSS卫星的反射信号,为探究 L1C 码的GNSS-R海面测高精度提供了可能。
岸基GNSS-R测高技术可作为现有验潮站等近海海面高监测方式的一种有效补充。在传统验潮站的建设中,需要建造验潮井等施工过程复杂、耗费人力、物力较多的基础设施。若采用GNSSR技术进行观测,仅需将设备固定在沿海岸边高处即可,具有成本低、架设方便等特点。通过在沿岸地区较为密集地布设GNSS-R监测设备,可为海洋科学和大地测量学研究提供重要的基础数据。因此,本文在山东省威海市开展了双天线岸基GNSS-R海面测高实验,同时,基于自主开发的GNSS-R测高软件接收机,采用了码相位延迟测高方法,系统分析了QZSS L1C/A码和L1C码的海面测高精度。
1 岸基GNSS-R测高理论
1.1 岸基测高几何模型
本文采用的岸基GNSS-R测高几何模型如图1所示。图中:h为反射天线相位中心到海面的垂直距离;θ为卫星高度角;Δρ为反射信号相对于直射信号的路径延迟;a为直射和反射天线相位中心间基线矢量;e为直射天线相位中心与卫星连线方向的矢量;T1、T2分别为垂直向上、向下的极化天线;V1、V2分别为天线T1和T2在卫星与直射天线相位中心连线方向的垂直投影。反射天线到海面的垂直距离小于6 m,因此不考虑地球曲率影响。
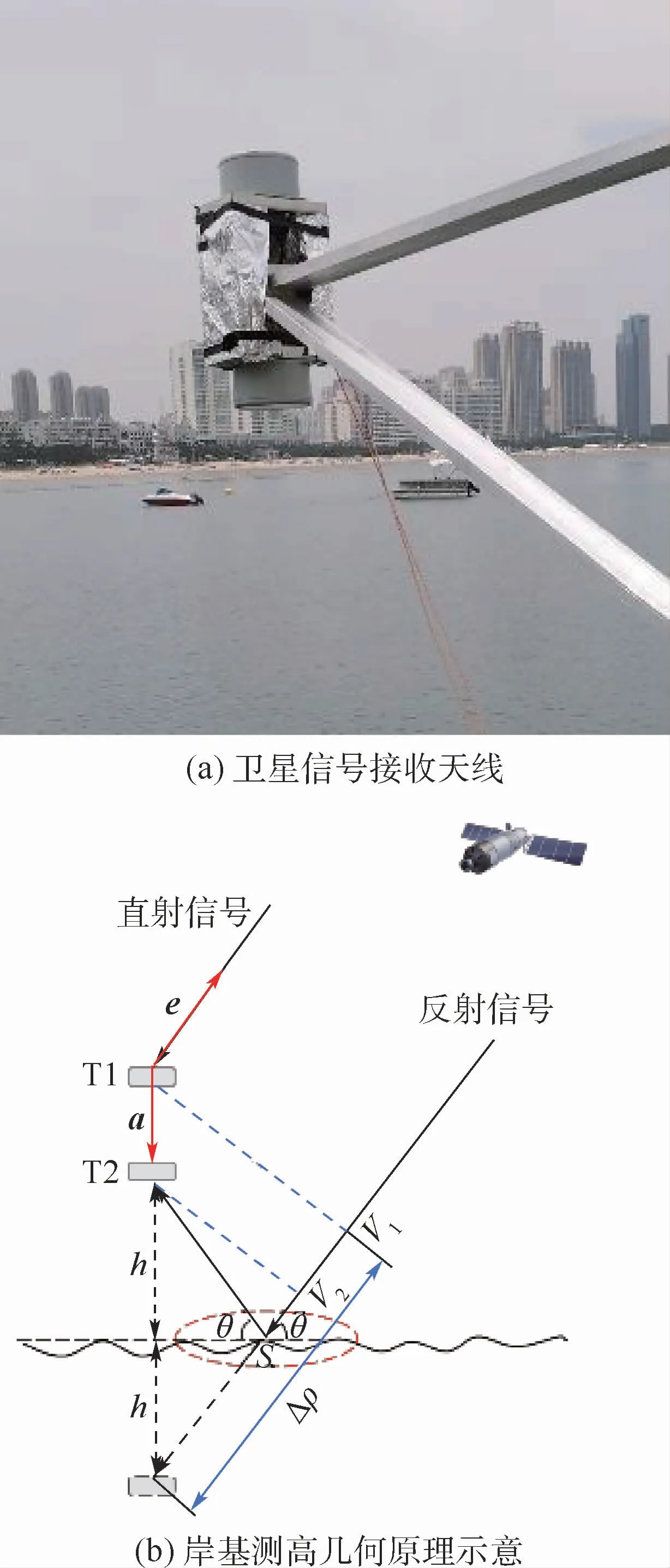
图1 岸基测高几何模型Fig.1 Coastal altimetry geometric model
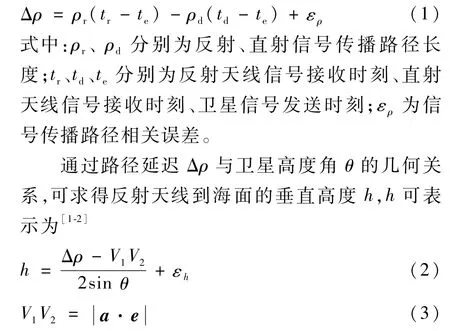
Δρ通常可表示为
1.2 QZSS L1波段信号
QZSS系统由1颗GEO和3颗IGSO卫星组成。目前,GPS和QZSS在L1波段上同时调制L1C/A码和L1C码,以确保同现代化GNSS信号的兼容性及互操作性。L1波段信号结构及其自相关函数如表1和图2所示[17],L1C/A码由测距码和数据码进行异或相加后,并对载波进行BPSK调制而成。为了避免信号在实现测距及传输导航电文时可能出现的性能冲突,L1C信号采用数据通道加导频通道的结构[16]。该信号由相互正交的数据分量和导频分量信号复合调制而成,数据分量由数据码和测距码异或相加后实现扩频,导频分量由测距码子码和测距码异或相加后实现扩频。扩频后的数据分量和导频分量分别对相互正交的载波进行BOC调制后复合成为复包络信号,其中,数据分量存在数据码周期跳变。

表1 L1C/A码和L1C码信号结构Table 1 Signal structures of L1C/A and L1C code
式中:V1V2为矢量a在卫星与直射天线相位中心连线方向的投影;εh为噪声。
由表1和图2可知,L1C码与L1C/A码的码率同为1.023 MHz,并且归一化后的自相关函数皆存在主峰。与L1C/A码相比,新一代L1C信号在数据通道和导频通道中分别采用了BOC(1,1)和TMBOC(6,1,4/33)调制方式,其中,BOC(m,n)中的m和n分别是以1.023 MHz为基数归一化后的子载波速率和扩频码速率,TMBOC(6,1,4/33)为相互正交的BOC(6,1)与BOC(1,1)分量[16]。L1C信号子载波的调制,使其自相关函数主峰较L1C/A码更尖锐,且主峰宽度约为L1C/A码的一半,因此,L1C码的测距性能将优于传统的L1C/A码[18]。

图2 L1C/A码和L1C码自相关函数Fig.2 Autocorrelation function of L1C/A and L1C code
1.3 码相位路径延迟获取
本文将路径延迟的获取分为2步:
步骤1 通过射频前端采集数字中频信号。
步骤2 利用软件接收机处理数字中频信号并获取码相位路径延迟。
1.3.1 中频信号获取
软件接收机射频前端信号处理流程如图3所示,流程如下:
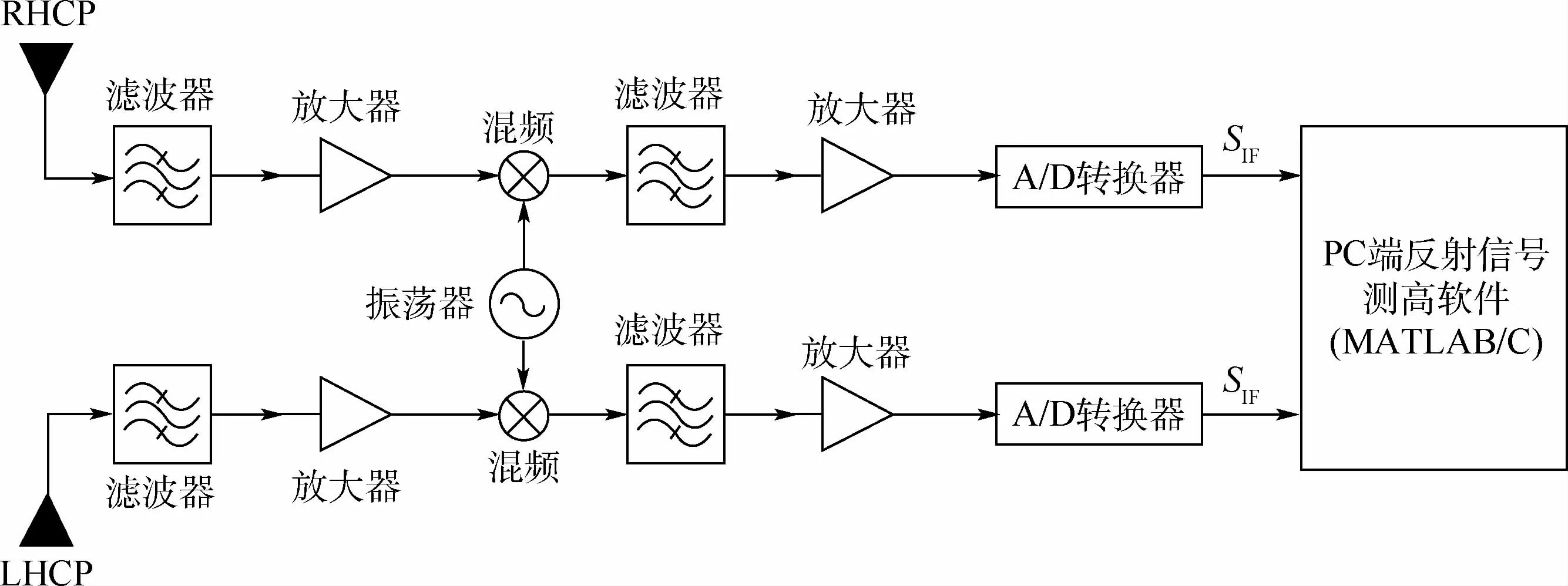
图3 射频前端处理流程Fig.3 Processing flow of RF front-end
1)右旋和左旋圆极化天线(PHCP和LHCP)分别接收到的直射信号和反射信号进入滤波器和放大器。信号经过滤波器后,除L1波段外的高频噪声被滤除,通过放大器对L1波段信号进行功率放大。
2)信号经过调整和放大后,进入混频器。信号经过混频后可获得0.42 MHz的低频信号,其他高频噪声将被滤除。
3)0.42 MHz的低频信号经过A/D转换器后将从模拟信号采样为数字信号,其采样率为40 MHz,符合香农采样定理[19]。数字中频信号进行4 Bit量化,且按高位到低位传输到存储设备中以便进一步处理。
1.3.2 中频信号处理
存储设备中的4 Bit数字中频信号,采用基于C语言平台开发的GNSS-R软件接收机进行处理。由于L1C信号中的数据分量和导频分量功率比为1∶3,导频分量的信号强度远高于数据分量,只处理L1C信号中的导频分量。中频信号经过软件处理后可分别获得L1C/A码和L1C码的海面测高结果。GNSS-R软件接收机处理流程如图4所示,其流程如下:

图4 GNSS-R软件接收机处理流程Fig.4 Processing flow of GNSS-R software receiver
1)粗捕获反射信号确定可见卫星。基于频域并行码相位捕获算法计算卫星相关功率是否超过捕获阈值,超过阈值则输出卫星PRN、码相位及多普勒频移信息。
2)以当前卫星码相位及多普勒频移信息为基准,同时对直射信号和反射信号重新进行精捕获,获取直射和反射信号间码相位延迟。
3)基于图1中几何模型,通过码相位延迟及卫星高度角可计算出反射天线到海面的垂直高度。
2 算例分析
2.1 实验设计
本文实验地点位于山东省威海市的某一海边栈桥,实验时间为北京时间2020年7月10日8:00—15:00。实验场地附近无高大建筑物遮挡,观测时段内风速约为2 m/s,海面较为平静。图5为实验场地及设备位置,栈桥最前端距离海岸线约100 m。图5(a)中,竖直向上的直射天线和竖直向下的反射天线保持在同一铅垂线上,且反射和直射天线同时朝向南面海域,可保证更多可用卫星。为了进行外部验证,在距离反射天线水平距离约为15 m的固定位置处安置工作频率为26 GHz的地基雷达测高仪,其到反射天线的垂直距离为1.153 m,输出频率为1 Hz,测距精度为±3 mm,可用于GNSS-R海面测高结果的精度检核。
2.2 实验结果与分析
2.2.1 伪码相关功率波形
观测时段内捕获到J1、J2、J3共3颗卫星,通过可见卫星的直射信号和反射信号间码相位延迟来计算出反射天线到海面垂直高度。以可见卫星J1为例,L1C/A码和L1C码的码相位延迟及相关功率波形变化如图6所示。可知,L1C码的相关功率波形较L1C/A码更平滑,且L1C码的主峰更尖锐。卫星信号经海面反射后会出现功率损耗,因此,L1C/A码和L1C码的反射信号相关功率值小于直射信号。图6(b)中,由于L1C码中采用了BOC调制方式,使其相关功率波形的主峰附近存在2个副峰,且带宽大于L1C/A码。
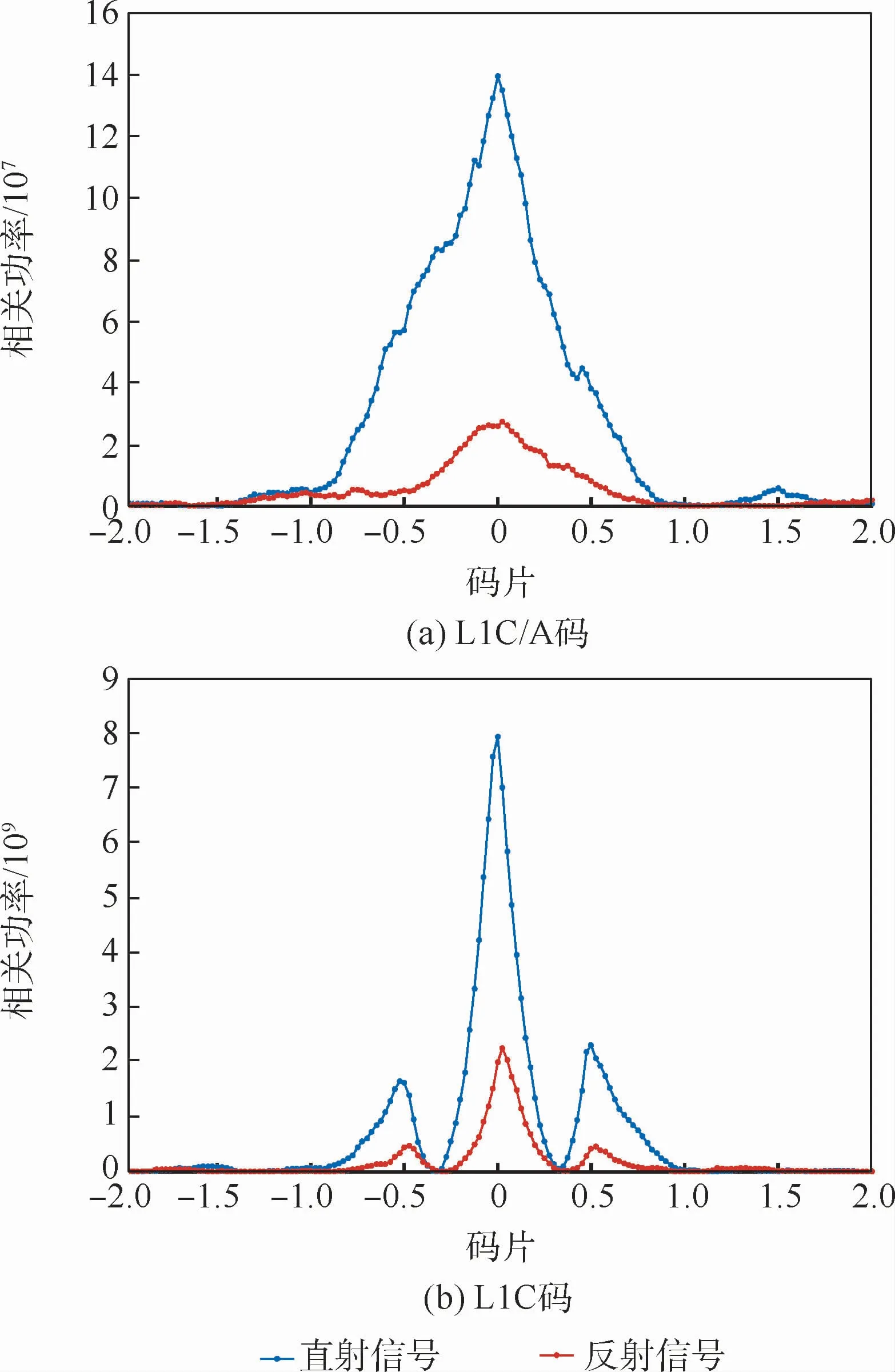
图6 L1C/A码和L1C码相关功率波形对比Fig.6 Correlation power waveform comparison between L1C/A and L1C code
2.2.2 测高结果分析
观测时段内,测站位置处不同卫星高度角的变化如图7所示。
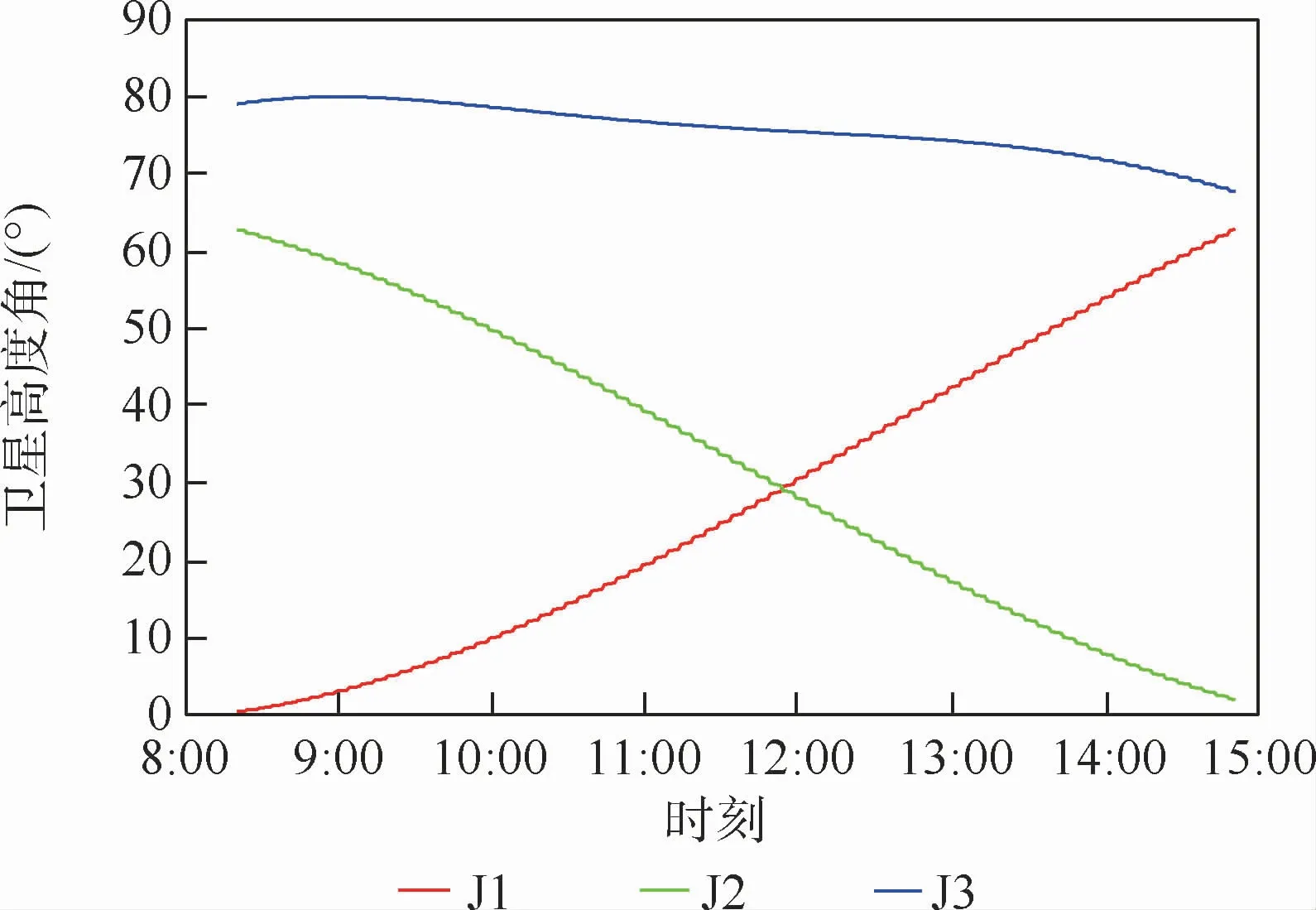
图7 J1、J2、J3卫星高度角变化(北京时间)Fig.7 J1,J2 and J3 satellite elevation changes(Beijing time)
由图7可知,J1的可用卫星高度角变化范围为50°~65°,J2的可用卫星高度角变化范围为65°~50°,而J3的可用卫星高度角变化范围为80°~68°,J3卫星高度角要始终大于J1、J2卫星。进一步分析可知,在该观测时间段内,J3的运行轨迹在远地点附近,而J1、J2的运行轨迹在近地点附近,因此,J3的卫星高度角的变化速率小于J1、J2。根据GNSS-R软件接收机输出的码相位路径延迟并结合卫星高度角,可分别计算出L1C/A码和L1C码的反射天线到海面的垂直高度。两者测高结果对比如图8所示,空白区域表示该观测时段内无数据。
由图8可知,海面的潮位最大变化量约为2 m,L1C/A码和L1C码测高结果均在雷达测高仪观测值上下波动,测高结果反映了潮位变化,验证了GNSS-R软件接收机的可用性。此外,J1、J2、J3的L1C/A码的测高结果的离散程度均大于L1C码,且L1C/A码测高结果的系统偏差大于L1C码。进一步分析,相同时刻可见卫星的L1C/A码和L1C码延迟岸基测高残差序列对比结果如图9、图10和表2所示。
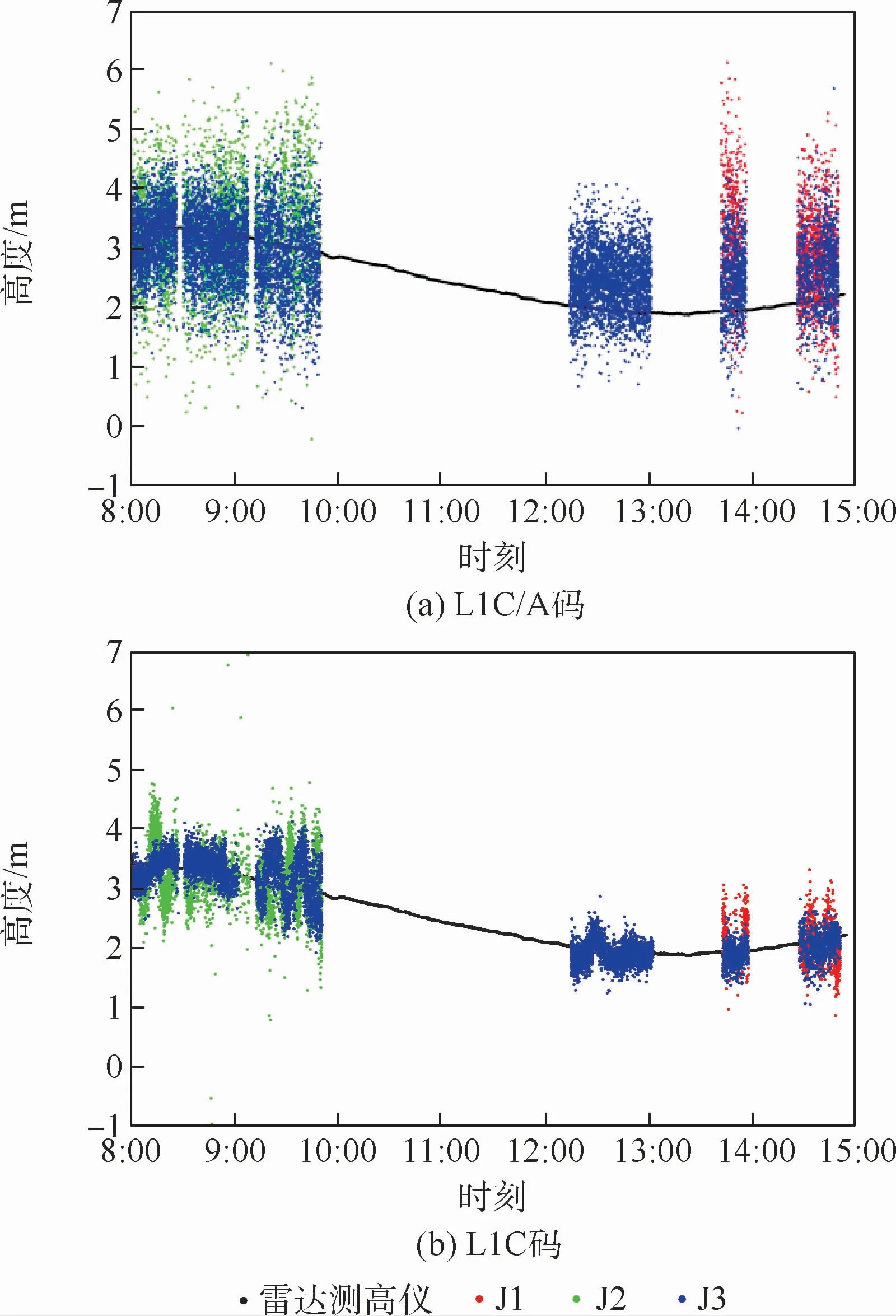
图8 L1C/A和L1C码GNSS-R测高结果对比Fig.8 Comparison of L1C/A and L1C code GNSS-R altimetry results
由图9、图10和表2可知,在8:00—10:00观测时段内,J2的码相位观测值结果中,L1C/A码、L1C码的均方根误差分别为0.917、0.695 m,标准差分别为0.908、0.514 m;J3的L1C/A码、L1C码的均方根误差分别为0.634、0.563 m,其标准差分别为0.597、0.313 m。J2码相位测高结果的误差范围约为±3 m,J3码相位测高结果的误差小于J2,但其测高结果存在部分系统偏差。结果表明,J2和J3的L1C码相位测高结果相较于L1C/A码更稳定,且L1C码的测高精度相对L1C/A码精度分别增加了24%、11%。

表2 J1、J2、J3码延迟和岸基测高结果精度对比Table 2 Comparison of the accuracy of code delay coastal altimetry results of J1,J2 and J3 satellites
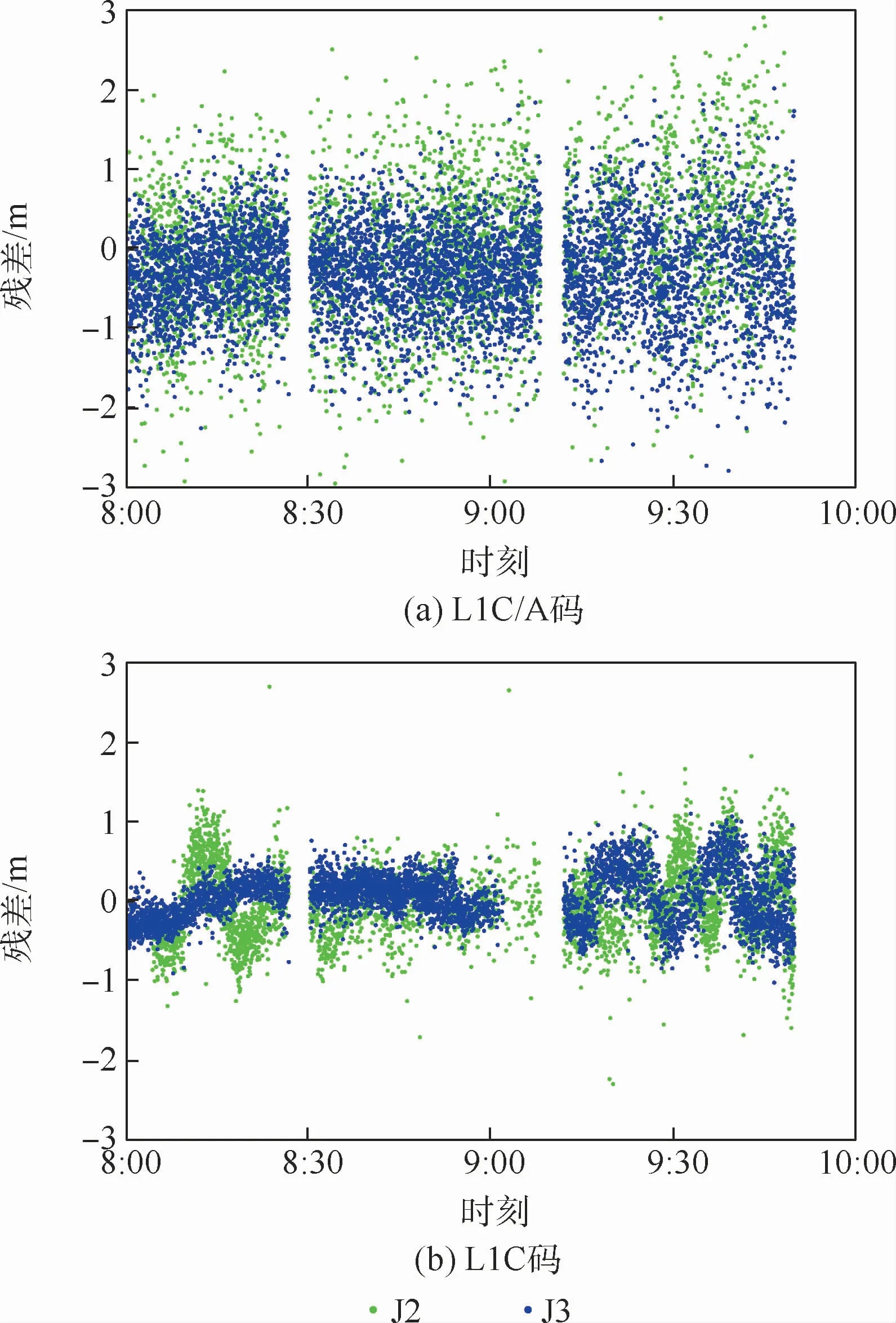
图9 J2、J3岸基测高结果残差序列对比Fig.9 Comparison of residual sequence of coastal altimetry results of J2 and J3 satellites
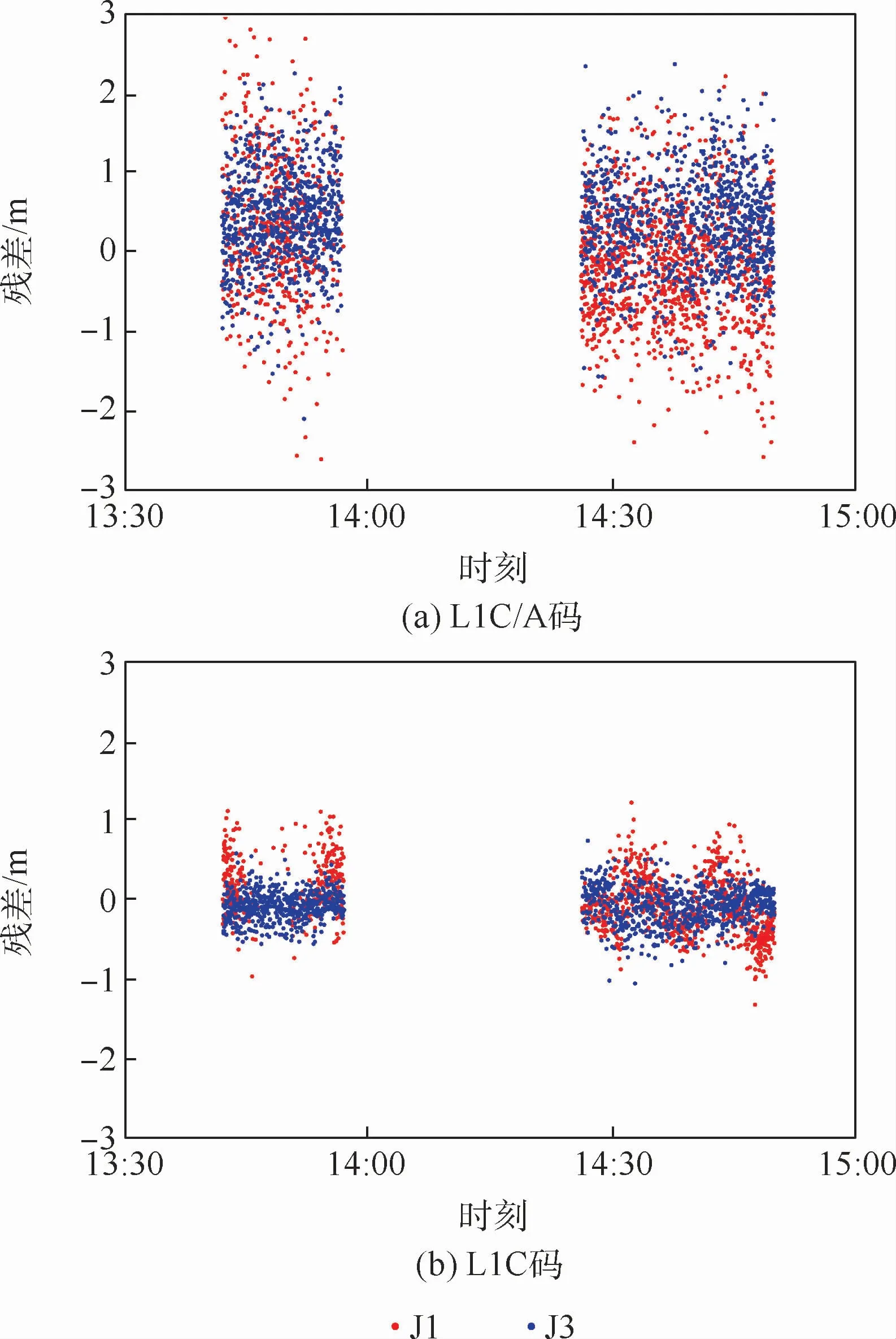
图10 J1、J3码延迟岸基测高结果残差序列对比Fig.10 Comparison of residual sequence of code delay coastal altimetry results of J1 and J3 satellites`
在13:30—15:00观测时段内,J1的L1C/A码、L1C码的均方根误差分别为1.226、0.726 m,标准差分别为0.855、0.391 m;J3的L1C/A码、L1C码的均方根误差分别为0.794、0.395 m,标准差分别为0.618、0.226 m。J1码相位测高结果的误差范围约为±3 m,J3码相位测高结果的误差范围约为±2 m,J1和J3的码相位测高结果均存在部分系统偏差。结果表明,J1和J3的L1C码测高相位结果较L1C/A码更稳定,L1C码的测高精度相比L1C/A码精度可分别增加了41%、50%。进一步分析,在相同时段内,J3卫星高度角明显大于J1、J2,J3的L1C/A码、L1C码测高精度比J2的分别增加了31%、19%,比J1的分别增加了35%、45%。文献[13]分析了码相位测高精度与卫星高度角之间联系,卫星高度角越大,码相位路径延迟中的噪声影响越小,卫星信号信噪比随之增大,海面测高精度相应提高。同时,图9和图10结果表明,卫星高度角较大时,残差序列比较稳定;卫星高度角较小时,残差序列在一定范围内上下波动。这是由于直射信号进入了反射天线,不同信号间相互叠加产生的多路径效应会对测高结果产生影响,进一步分析并削弱该误差因素可提高海面测高精度。
3 结 论
本文开展了双天线岸基海面测高实验,基于自主开发的GNSS-R测高软件接收机对QZSS L1波段信号的码相位延迟测高性能进行了分析,可得以下结论:
1)通过GNSS-R岸基实验验证了QZSS L1C码相位岸基测高精度,同时也验证了自主开发的L1C/A码和L1C 码GNSS-R 软件接收机的可用性。
2)海况良好时,L1C码、L1C/A码的测高精度分别为0.60、0.94 m,L1C码、L1C/A码最优精度分别为0.4、0.63 m。L1C码的测高精度相对于L1C/A码精度增加了32%。
3)在相同观测时段内,卫星高度角越大,路径延迟中的噪声越小,卫星信号信噪比随之增大,测高精度相应提高。
猜你喜欢
作文新天地(小学版)(2022年8期)2022-05-30 04:30:04
红蜻蜓·低年级(2021年2期)2021-07-20 04:48:09
小学科学(2020年6期)2020-06-22 13:13:41
现代电子技术(2019年1期)2019-01-10 01:48:14
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
大陆桥视野·下(2017年5期)2017-06-19 01:20:38
小学生导刊(2017年18期)2017-05-17 05:44:37
光学精密工程(2016年3期)2016-11-07 09:03:34
通信电源技术(2016年6期)2016-04-20 06:21:24
测绘科学与工程(2016年6期)2016-04-17 06:51:25