低空数字航摄与数据处理系列标准编制说明
2022-04-29 06:08李西林李英成薛艳丽丁晓波朱祥娥
测绘标准化 2022年1期
李西林 李英成 薛艳丽 丁晓波 朱祥娥
(1.中测新图(北京)遥感技术有限公司 北京 100039;2.自然资源部航空遥感技术重点实验室 北京 100039; 3.北京市低空遥感数据处理工程技术研究中心 北京 100039;4.武汉中测晟图遥感技术有限公司 湖北武汉 430223)
21世纪初,低空无人飞行平台搭载数码像机作为一种新的测绘手段开始应用以来,由于低空数字航空摄影测量所获取的影像具有像幅较小、畸变大、影像数量多、姿态差等特点,原有的普通航空摄影测量相关规范已不适用于此类低空数字航空摄影测量生产。为推动低空数字航空摄影测量的产业应用和规范发展,相关管理部门根据当时的行业技术水平、应用情况及相关软硬件现状,参照有关航空摄影测量标准编制并发布了低空数字航空摄影测量的一系列指导性文件,如CH/Z 3003—2010《低空数字航空摄影测量内业规范》[1]、CH/Z 3004—2010《低空数字航空摄影测量外业规范》[2]和CH/Z 3005—2010《低空数字航空摄影规范》[3]。这些指导性文件在技术设计、产品生产及验收等生产实践中得到了广泛应用。
近10年来,对低空数字航空摄影的研究和应用不断深入,特别是在低空无人飞行平台的硬件和后续数据处理软件等方面的技术都有了飞速发展,生产实践得到进一步丰富,成熟案例也越来越多,同时由于低空无人飞行平台的灵活机动、反应迅速越来越受到重视,在各行业得到广泛应用,特别是在小区域制图方面,由于其较高的性价比已经取代了传统航空摄影测量。因此,根据目前已有的技术水平以及未来若干年的发展趋势,有必要对已有的行业指导性文件进行修订,制定相应的低空数字航空摄影测量数据获取与处理国家标准和测绘行业标准。
新制定的低空数字航摄与数据处理相关系列标准包括国家标准GB/T 39612—2020《低空数字航摄与数据处理规范》[4],测绘行业标准CH/T 3003—2021《低空数字航空摄影测量内业规范》[5](代替CH/Z 3003—2010 《低空数字航空摄影测量内业规范》)、CH/T 3004—2021《低空数字航空摄影测量外业规范》[6](代替CH/Z 3004—2010 《低空数字航空摄影测量外业规范》)和CH/T 3005—2021《低空数字航空摄影规范》[7](代替CH/Z 3005—2010《低空数字航空摄影规范》)。其中,国家标准已于2020年12月14日起开始实施,测绘行业标准已于2021年8月1日起开始实施。
新制定的低空数字航摄与数据处理相关系列标准对实际生产具有指导意义,必将带动我国低空数字航空摄影测量相关技术、产品和软硬件的研发与应用等。本文主要对新制定的低空数字航摄与数据处理相关系列标准的编制原则、编制工作过程中的若干技术问题和关键控制指标技术进行分析和说明。
1 编制原则
本系列标准的编制遵循科学性、实用性、协调性和规范性等原则,具体表现在:
1.1 科学性
本系列标准在编制过程中,以摄影测量与遥感学理论为依据,按照航空摄影测量的数据获取作业流程及内业、外业的作业流程进行系统的规范。
1.2 实用性
目前国内用于低空数字航摄的系统众多,其共同特点是像幅小,飞行姿态稳定性相对较弱。本系列标准在编制中,从低空数字航摄、外业像片控制测量、内业空中三角测量和基础地理信息成果生产等方面进行规范和约定,突出了低空特点,规定了共性方法和原则性指标,使其能适用于不同厂家、不同类型的低空数字航摄与数据处理装备,回避了因软硬件差异造成的个性问题。
目前国内外相关内业处理软件有JX4、VirtuoZo、DPGrid、PixelGrid、TOPGRID、 ImageStation SSK和GodWork等,这些处理软件都具有其各自的特点,都对低空数字航空摄影测量的内业作业流程、最终产品的规格进行了规范和约定,可适用于不同航空摄影测量项目的作业。
本系列标准在外业测量技术设计及像片控制点布设等方面突出了低空特点,在编制过程中融入了实际生产经验和技术统计指标,充分考虑了实际生产作业中出现的问题,便于实际作业的操作。
1.3 协调性
本系列标准对基础地理信息图件产品的要求依然严格遵循GB 35650—2017 《国家基本比例尺地图测绘基本技术规定》[8],只是对其实现过程和装备以及生产方法进行了规范,修改了生产过程中一些适用于无人机航空摄影测量的技术指标和作业流程方面的要求。
CH/T 3007.1—2011《数字航空摄影测量 测图规范 第1部分:1∶500 1∶1 000 1∶2 000 数字高程模型 数字正射影像图 数字线划图》[9]基于数字摄影测量当前的技术特征对航空摄影测量的测图成果生产进行了技术约定和作业指导,系列行业标准 CH/T 9008分别对1∶500、 1∶1 000、 1∶2 000比例尺数字线划图、数字高程模型和数字正射影像图[10-12]3种基础地理信息成果的精度及规格进行了约定。由于低空数字航空摄影测量较传统数字航空摄影测量在数据获取质量上有一定的区别,因此本系列标准在编制过程中,在充分分析二者的同异和技术指标在低空数字航空摄影适用性的基础上,根据目前国内的生产经验,尽可能对低空数字航空摄影测量的内业工作要求、技术指标及产品要求进行全面、明确的规定。
GB/T 7931—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量外业规范》[13]针对模拟、解析航空摄影测量方法对1∶500、1∶1 000、1∶2 000地形图测绘的外业工作进行技术规定,CH/T 3006—2011《数字航空摄影测量 控制测量规范》[14]基于数字摄影测量的技术特征对航空摄影测量的像片控制测量进行规定。本系列标准则根据低空数字摄影测量中影像像幅较小、姿态差等特点,以及不同类别产品的相关要求,同时结合传统的航空摄影测量外业规范,对地形图测绘的外业工作进行了新的规定。
1.4 规范性
本系列标准按照GB/T 1.1—2009 《标准化工作导则 第1部分:标准的结构和编写》[15]的规定进行编制。
本系列标准针对无人机行业应用的海量需求和广阔前景,在科技部相关标准研究课题的基础上,依据国家质量基础设施(NQI)标准项目立项任务书要求进行编制,在技术方面,参考了数字航空摄影测量、IMU/GNSS辅助航空摄影、控制测量规范和低空数字航空摄影测量等国家标准和行业技术指导性文件。
2 关键指标及其分析
2.1 产 品
本系列标准根据目前低空数字航空摄影测量技术的发展水平和应用成果进行制定,适用于1∶500、1∶1 000、1∶2 000比例尺数字线划图、数字高程模型和正射影像图的制作,删除了原CH/Z 3003—2010《低空数字航空摄影测量内业规范》[1]中对数字线划图(B类)和数字正射影像图(B类)的规定。按照本系列标准生产的成果满足基础地理信息数字成果的要求。
2.2 低空数字航空摄影
2.2.1 平台和像机
低空数字航空摄影对飞行平台的要求主要包括抗风能力(不低于4级)、自动驾驶仪、具有定点曝光或等距曝光控制功能、位置姿态记录和测高可检验等。
小像幅航摄数码像机有别于数字航摄仪,大多都是改造自民用数码像机,在进行低空数字航空摄影时需要对航摄数码像机的结构、基本指标、检校要求和安装要求等进行规定。新制定的低空数字航摄与数据处理相关系列标准规定航摄数码像机最高快门速度由不低于1/1 000 s变为不低于1/800 s,并增加了飞行方向航向视场角要求,以保证平面和高程基本测量精度。
飞行方向视场角指矩形像幅中,用于构建立体模型基线方向的视场角。航向视场角和重叠度决定了摄影测量前方交会角度,进而决定了基高比和高程精度。视场角与交会角和基高比的关系如图1所示。
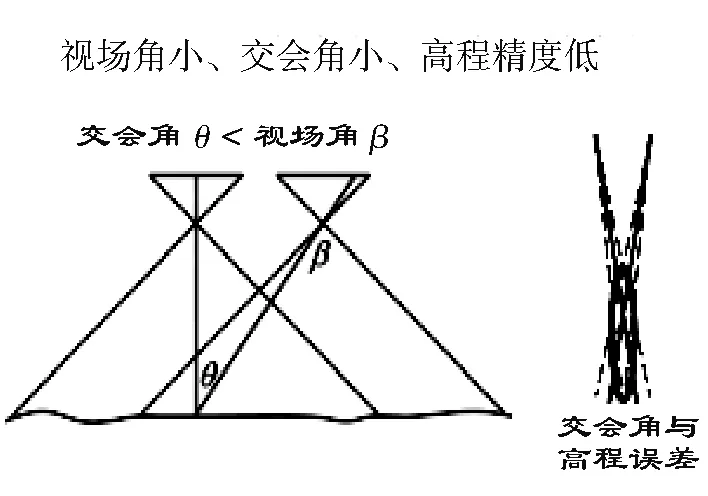
图1 视场角与交会角和基高比Fig.1 FOV,Intersection Angle and Ratios of Base- Height
高程误差的大小由式(1)决定[16],基高比越小,高程误差越大。
(1)
式中:H为航高,B为基线长,mΔp为左右视差量测精度,mh为高程精度。
经检校空三高程收敛精度达到像方1/3个像素的中误差限制时,对应的像机视场角为26.991°。因此,本系列标准规定航摄数码像机视场角的限制值为27°。
对于数码像机沿对角线方向表示视场角,主要源自CCD和CMOS传感器生产中对材料幅面的要求。摄影测量学中,仅仅需要飞行方向(航向)构建立体视野的视场角,对于不是正方形的CCD和CMOS传感器来讲,通常指矩形短边对应的视场角,如图2所示。
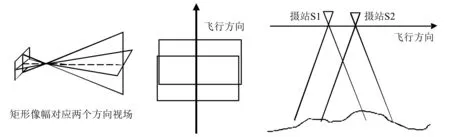
图2 非正方形CCD的视场角Fig.2 FOV of Non- Square CCD
2.2.2 航摄计划与航摄设计
本系列标准在航摄计划与航摄设计方面的主要变化:
1)增加了对基准面上设计地面分辨率的要求,推荐了宜采用的地面分辨率(见表1),以提高影像质量,同时兼顾执行效率,确保满足后续基础地理信息成果生产要求。
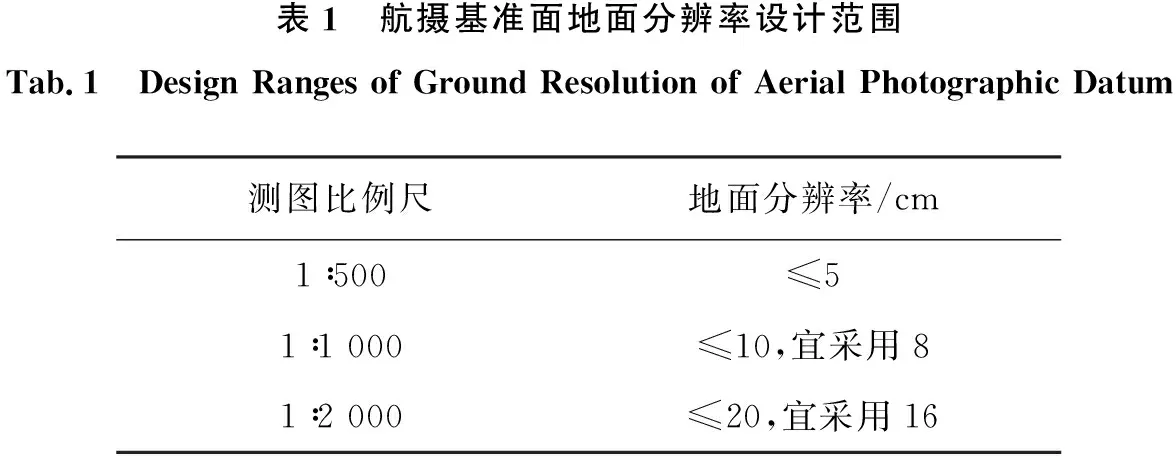
表1 航摄基准面地面分辨率设计范围Tab.1 Design Ranges of Ground Resolution of Aerial Photographic Datum测图比例尺地面分辨率/cm1∶500≤51∶1 000≤10,宜采用81∶2 000≤20,宜采用16
2)规定在高山地航摄分区时,地形高差的限制可适当放宽为1/3航高,并规定可按照最低点分辨率不低于基准面上设计值的1.5倍的原则重新进行分区,或者超限面积比例不超过10%的零散小分区可以向相邻分区合并,以提高数据获取效率。
3)规定无人驾驶飞行器的飞行速度选择应与像机快门速度设置相匹配,以保证像点位移量不超过0.5个像素;增加了需要预先布标的条件和要求,有利于系列标准间的衔接。
2.2.3 飞行质量与影像质量
对于以测制大比例尺地理信息图件产品为目的的航空摄影测量项目,新制定的低空数字航摄与数据处理相关系列标准严格约束了重叠度、倾角和旋偏角等指标,并对原行业指导性文件《低空数字航空摄影规范》[3]的指标限值进行了修订。
本系列标准在编制过程中,统计了大量实际空中三角测量生产案例的外方位元素值,重点根据低空飞行的特点,放宽了重叠度和倾角指标,目的是为了提高航摄效率。经试验验证,由于放宽了重叠度和倾角指标带来的不利影响,目前的后处理软件完全可以弥补。根据多个测区的统计结果,规定像片旋偏角通常不超过15°,最大不超过25°;根据大量实际飞行的统计结果对像片倾角进行规定,为了方便计算,使用横滚和俯仰角中较大者作为像片倾角,规定像片倾角通常不超过12°,最大不超过15°。
2.3 像片控制测量
2.3.1 像片控制点布设
像片控制点的布设与很多因素有关,诸如像机、航高、影像重叠度、像机姿态和测区地形等。本系列标准规定了像片控制点选点条件和布设要求,并按基线估算公式对基线长度进行计算,按照摄影测量原理提出了相邻平高控制点和高程控制点间的航向间隔基线数和旁向间隔航线数。同时,给出了采用GNSS和IMU/GNSS辅助航摄时的布设方案,以及单航线、全野外布点和特殊情况下的布设方法。
本系列标准根据实际生产中的30个不同比例尺、不同地形以及带差分和不带差分条件下DOM和DLG生产案例中的像片控制点布设及空三结果,对控制点的航向和旁向间隔基线数进行了规定(见表2),作为控制点布设的最大跨度要求。
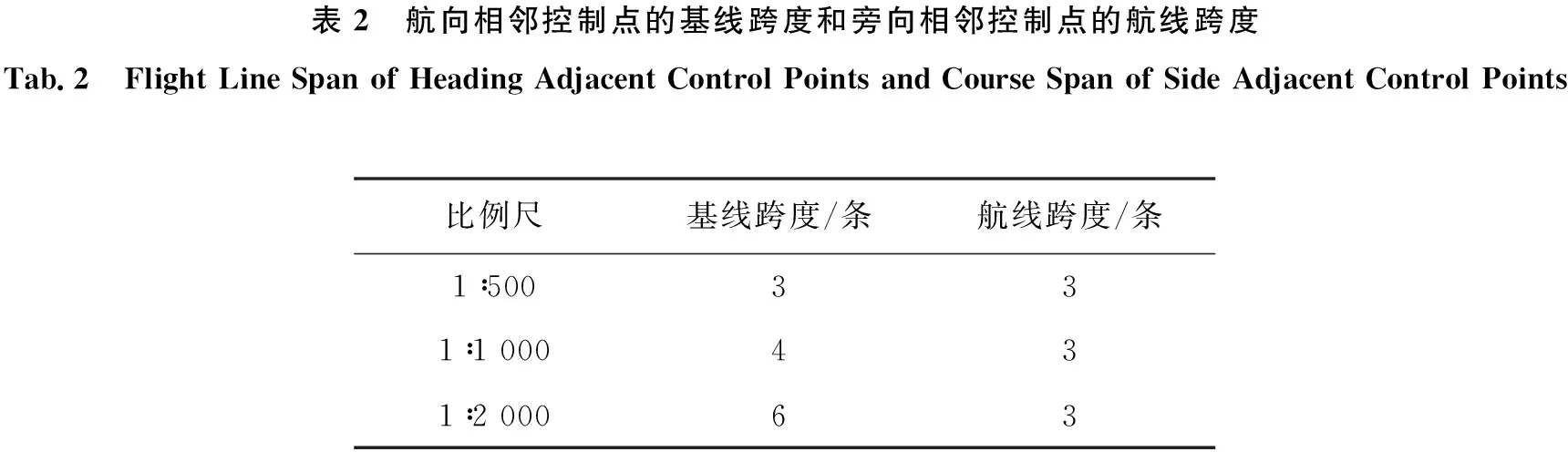
表2 航向相邻控制点的基线跨度和旁向相邻控制点的航线跨度Tab.2 Flight Line Span of Heading Adjacent Control Points and Course Span of Side Adjacent Control Points比例尺基线跨度/条航线跨度/条1∶500331∶1 000431∶2 00063
本系列标准还规定,当测区内普遍难以找到合适的像片控制点目标时,航摄前应铺设地面标志,并提供了常用地面标志式样的资料性附录。
2.3.2 像片控制点测量
本系列标准规定基础控制点、像片控制点的测量方法和要求按CH/T 3006—2011《数字航空摄影测量 控制测量规范》执行,将“刺点和整饰”改为“像片控制点选点、测量与整饰”,同时明确了点之记照片和像控点成果整理的要求,并提供了相应的资料性附录。
2.3.3 调 绘
本系列标准对相关标准中调绘方面的内容进行了整理分析。在此基础上,结合目前生产情况对调绘的具体内容进行了规定,其中,调绘基本单元按照生产实际给出了划分方法。
2.4 空中三角测量和内业生产
2.4.1 影像预处理
本系列标准对空三加密之前的影像预处理工作要求进行了修订,增加了影像旋转至与航摄方向一致的要求。
2.4.2 扫描影像与内定向
本系列标准删除了扫描影像和内定向的内容,仅将数字影像作为处理对象。
2.4.3 精 度
本系列标准明确规定了连接点对最近野外控制点平面位置中误差与高程中误差(见表3)的要求,更方便参考和使用。
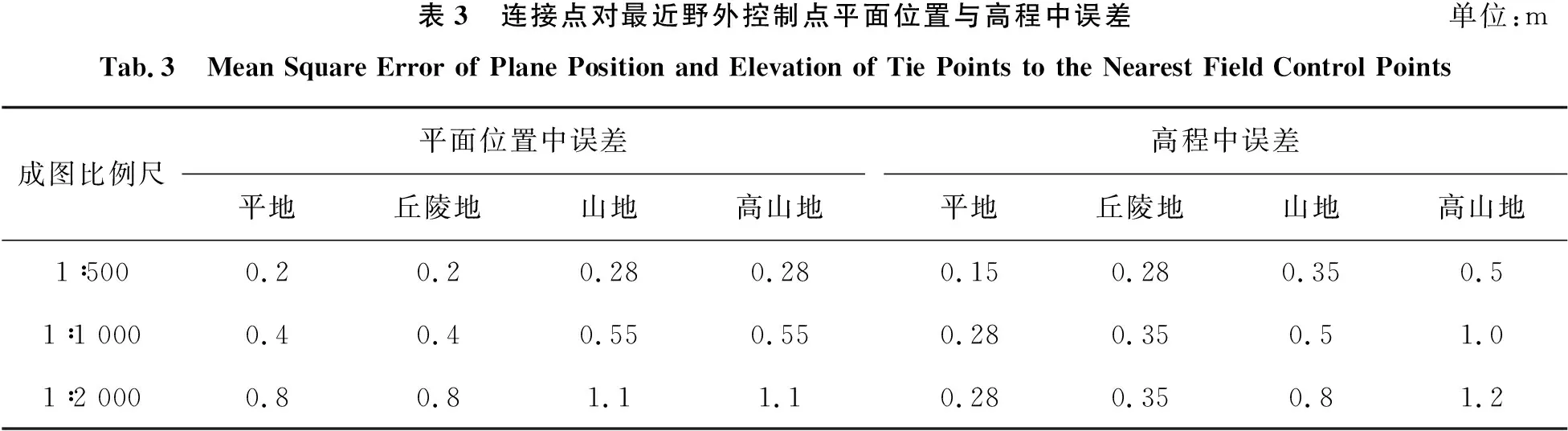
表3 连接点对最近野外控制点平面位置与高程中误差单位:mTab.3 Mean Square Error of Plane Position and Elevation of Tie Points to the Nearest Field Control Points成图比例尺平面位置中误差平地丘陵地山地高山地高程中误差平地丘陵地山地高山地1∶5000.20.20.280.280.150.280.350.51∶1 0000.40.40.550.550.280.350.51.01∶2 0000.80.81.11.10.280.350.81.2
2.4.4 相对定向
新制定的低空数字航摄与数据处理相关系列标准中,相对定向的视差要求和模型连接要求与传统航空摄影测量的要求保持一致,其中,相对定向的视差要求和模型连接要求根据对目前主流像机的理论计算进行规定,并在生产实践已经得到了验证。同时,系列标准还规定了多模型检查相对定向和模型连接的精度指标。
目前实际生产中通常采用自动匹配点的方式匹配连接点,自动匹配过程中考虑了特征和几何等多种因素,每张影像通常都有几十个匹配点,在匹配点数量达不到要求的情况下需要人为加点。本系列标准根据对实际生产数据中连接点位置的统计结果,提出了连接点位置要求: 航线连接点宜采用3度重叠,旁向连接点宜采用6度重叠;连接点距离影像边缘不应小于 15个像素,这与传统航空摄影测量[17]规定的0.1 cm和CH/Z 3003—2010《低空数字航空摄影测量内业规范》[1]规定的100个像素的要求有很大区别。
2.4.5 自由网平差
根据低空数据处理特点,本系列标准增加了自由网平差方面的要求,以保证平差的最终结果能满足地理信息成果生产的需要。根据对实际生产统计数据的分析,规定自由网平差后像点残差不大于 2个像素。
2.4.6 绝对定向与区域网平差
本系列标准重新规定了适合于低空航空摄影测量的区域网平差计算后的基本定向点残差、检查点误差和公共点较差,还根据生产实际增加了自检校平差方面的内容,明确了自检校平差的处理方法。
3 结 语
本系列标准在编制过程中,收集了大量实际生产案例的飞行数据、像片控制点布设方案和相应的空中三角测量结果,经统计分析后,用于确定低空数字航摄与数据处理相关系列标准中航摄计划与实施、航摄成果、像片控制点布设、空中三角测量中的关键质量和技术指标。同时,在系列标准修订过程中广泛征求了相关生产单位和专家的意见,并将其采纳进低空数字航摄与数据处理相关系列标准中。
因此,新制定的低空数字航摄与数据处理相关系列标准中规定的关键指标能满足生产实践,对实际生产具有指导意义。
无人机低空航空摄影技术的快速发展,在国民经济建设和社会发展中的应用日益广泛,尤其是对地观测、快速获取大比例尺高精度地形图数据已成为最热的增长方向。据咨询机构预测,低空航空摄影数据的需求每年具备100亿以上经济规模。近年来,工业无人机已经突破6 000套,消费级无人机也突破了百万架,以及物联网+和应急服务的需求驱动,我国无人机应用已经达到世界先进水平。因此,对低空数字航摄与数据处理相关系列标准进行研究,一方面可为无人机低空遥感行业百亿级数据和地图生产提供规范依据,促进专业化服务,避免无序发展;另一方面,在带动民用通用航空器无人机研制与应用、无人机空管技术与政策、电子信息产品应用、自动控制与智能技术、灾害应急、生态环境保护和自然资源管理等方面将产生积极的影响,起到广泛而深远的作用。
猜你喜欢
建材发展导向(2022年12期)2022-08-19
运输经理世界(2022年17期)2022-08-18
青年文学家(2020年10期)2020-04-27
航空知识(2019年1期)2019-01-11
卷宗(2017年23期)2017-09-02
卷宗(2016年12期)2017-04-19
科技创新与应用(2017年5期)2017-03-16
科技创新导报(2016年25期)2017-03-13
环球人文地理·评论版(2016年8期)2017-01-19
南方文学(2016年3期)2016-06-12