
受控定向孔钻进用自动导航系统的分析研究
2022-04-24 09:27:18汤凤林赵荣欣段隆臣
钻探工程 2022年2期
汤凤林,赵荣欣,周 欣,段隆臣,Чихоткин В.Ф.
(1.上海市建筑科学研究院有限公司,上海 200032;2.中国地质大学(武汉)工程学院,湖北 武汉 430074;3.湖北省地震局,湖北 武汉 430064)
1 概述
钻探工程中,特别是在复杂地质条件下的深部分支孔定向钻进中,为了提高钻探效率、保证钻孔质量、提高技术经济指标,需要及时掌握孔底实时位置(孔深)、顶角、方位角,以及造斜器具在孔底的安装角度等,为此需要使用遥测系统[1-20]。遥测系统一般包括有:最大限度接近孔底的一组传感器,动力供给装置,从孔底到地面信息的获得、传送和接收系统,处理所得信息以便解决检测、控制钻进过程的计算机所需的信息系统等。
为了从孔底向地面传送信息,需要不同的联系通道。联系通道有多种,有声波联系通道、水力联系通道、电磁(无杆)联系通道、有杆联系通道、组合联系通道等。但是目前使用较多的是水力联系通道和电磁联系通道以及二者的组合[1-2]。
水力联系通道中,利用的是活阀运动产生的钻井液压力脉冲。水力脉冲传感器装在钻杆柱内部。水力脉冲压力与时间的关系P=f(t),见图1。活阀压向钻杆柱内正向冲洗液,产生压力正脉冲,用代码1 表示,表示压力提高(见图1a),如果钻井液定期通过活阀进入钻杆外空间,则产生负脉冲,用代码0表示,表示压力降低(见图1b)[7-9]。

图1 水力脉冲压力与时间的关系P=f(t)通道信号代码Fig.1 Hydraulic pulse pressure as a function of time P=f(t)and code of communication signal
也可使用依靠改变压力脉冲相位传送信息的回转型脉冲发生器(见图2)。压力脉冲是靠具有一定转速的叶片回转得到的,相位转换是利用叶片2 向左或向右回转得到的。叶片向某个方面转动,导致脉冲相位产生一定位移,即向1 或0 移动。
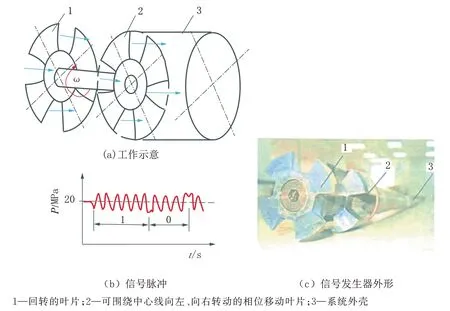
图2 回转型脉冲发生器Fig.2 Rotary type pulse generator
遥测系统电磁联系通道原理如图3 所示。信号从位于孔底遥测系统中的钻杆柱下方无磁分隔管的信号源出来。电磁波通过岩石把信号传送给接地天线,被信号处理系统吸收,由计算机进行处理。

图3 遥测系统电磁联系通道工作原理Fig.3 Working principle of the electro‑magnetic link route in the remote measurement system
2 钻进用信息-工艺-自动导航系统
俄罗斯“领航员”遥测系统科研所的科研人员把信息、工艺、自动导航结合起来,开发出了钻进用信息-工艺-自动导航系统,见图 4[7-9]。
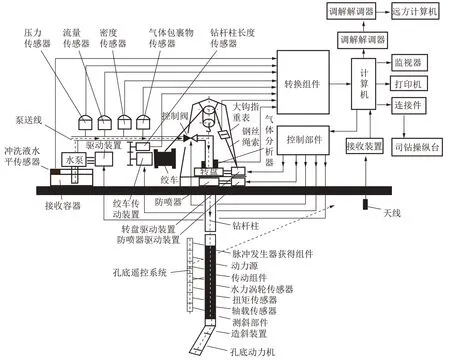
图4 钻进用信息-工艺-自动导航系统示意Fig.4 Automatic information‑procedure‑navigation system for drilling
钻进自动导航系统包括位于钻杆柱中的孔底动力机、孔底遥测系统、动力源、水泵及其驱动装置。泵与接收容器连接,容器中置有冲洗液水平传感器。在水泵的泵送线上,置有压力传感器、流量传感器、密度传感器和检测有无气体包裹物存在的传感器。在泵送线上还装有控制阀。天线上接有接收装置,其出口端与计算机的入口端连接。计算机的第2 个入口端接有转换组件。
绞车包括绞车传动装置。绞车上置有钻杆柱长度传感器。大钩指重表装在钢丝绳索上。钻杆柱通过转盘,转盘包括有造斜装置定向用的转盘驱动装置。
在钻杆柱的上部,置有防喷器及其驱动装置。在钻杆柱外部空间中,置有气体分析器、轴载传感器、扭矩传感器和水力涡轮传感器。传动组件和测斜部件置于孔底遥测系统的壳体内。计算机出口端接有监视器、打印机,通过连接件接有司钻操纵台和调解解调器(通常称之为“猫”)。调解解调器沿着电话线通过调解解调器与远方计算机连接。计算机的出口与控制部件连接。控制部件与水泵的传动装置、绞车传动装置、转盘传动装置、防喷器传动装置和控制阀连接。在动力源的上方,也可装置脉冲发生器获得组件,以便按水力联系通道传送信息。
计算机装有信息、工艺的程序软件,包括操作系统程序、信息处理程序、制定技术解决问题措施程序和控制程序。
转换组件包括模拟-数字处理器(按传感器的数量分别为АЦП50—АЦП58)、控制器、本组件的“猫”和动力供给部件。
本自动导航系统的工作原理如下。
钻进时,水泵沿着泵送线路向涡轮钻具供给冲洗液,驱动涡轮钻具工作。从测斜部件来的测斜参数和从轴载传感器、扭矩传感器和水力涡轮转数传感器来的孔底参数,通过传动组件,以电磁波形式传给天线、接收装置进入计算机。从地上工艺传感器来的信号,传给转换组件的入口和计算机的入口,进行转换、处理,同时传给监视器和司钻操纵台,必要时传给打印机。在监视器屏幕上,可把信息快速、高质量、清楚地传给物探人员,部分信息以数字-模拟方式传到司钻操纵台上,而且可以利用置于附近的光极管,以模拟方式提供测斜资料。
转换组件把从所有地上传感器来的资料,转换为计算机可以使用的信号。装置在孔底遥测系统壳体内的传感器,通过传动组件把信息传送给地表天线、接收装置,继而传给计算机。
利用处理从工艺传感器传来信息用的软件,可以处理从传感器来的全部信息,首先向监视器屏幕提供数字形式,然后提供表格、图件、曲线等形式的形象化资料,计算并给出通过数学转换测得的参数,例如钻孔偏离设计轨道得到的资料。利用技术措施制定软件,对信息进行比较复杂的逻辑转换和数学转换。控制软件对该系统执行机构直接给出控制信号,以便提出与钻进过程控制方面有关的建议。执行机构包括水泵传动装置、绞车传动装置、转盘传动装置和防喷器传动装置。发生事故情况下,也可发出(声和光)警告信号。本组件也可以保证通过对水泵传动装置、绞车传动装置、转盘传动装置和防喷器传动装置施加作用而使钻进过程完全自动化。而且,控制施加的每一个作用,都可以是单独实现的,也可以是任何组合形式实现的。
使冲洗液产生水力脉冲的脉冲发生器,可以保证把有关孔斜参数和孔底工艺参数的信息沿着水力联系通道传送。同时,可以使用2 个联系通道之一的水力联系通道或电磁联系通道来复制得到的信息,以提高系统的可靠性。
本系统还可以保证把信息传送到远方的计算机,以便实现不仅可以对一个井场进行控制,还可以对周围井场乃至整个油田进行控制。
自动导航系统包括的遥测系统,用于确定钻柱下部装置的空间定位和确定钻进过程优化需要的孔底参数。遥测系统中的孔内仪器,可以保证对孔底造斜器进行定向,也可以向地面连续传送和指示无磁异常地质介质中涡轮钻进过程中的钻孔方位角、顶角的信息。
自动导航系统中的遥测系统工作过程:冲洗液带动流通式发电机涡轮,产生供给孔内仪器电子部件的电能。来自传感器的信息被转换成代码系列,根据钻进条件和有关相应的组件,按照电磁联系通道或水力联系通道进行传送。在地表上,电磁信号被距钻场30~50 m 的天线接收,水力脉冲信号被安装在水泵泵送线上的传感器转换器接收。在接收装置中,接收到的信号被译码,进入计算机处理。
在遥测系统中的孔内部分中,有微型组件结构。遥测系统的功能取决于其所包含微型组件的组成,微型组件又取决于工艺需要。
遥测系统主要性能参数如下[7-9]:
测 量 范 围 及 精 度 :顶 角 0°~180°(±0.1°~0.15°),方位角0°~360(°±1°~2°),造斜器安装角0°~360(°±1°~2°)。
孔内仪器安装尺寸:直径≯172 mm,长度3000 mm。.
孔内仪器供电发电机性能:频率2000±500 Hz,电压18~70 V。
地表仪器供电源性能(交流):频率50 Hz,电压220~240 V。
工作参数:孔底工作温度<125 ℃,冲洗液流量7~60 L/s,最大静压100 MPa,发电机寿命≮200 h,冲洗液含砂量<3%,抗振稳定性<12 g,抗冲击强度<1000 g。
使用带有电磁联系通道和水力联系通道的孔底遥测系统,可以测量钻进过程中的导航参数和地球物理参数,包括钻井液不能循环时的参数,在钻具提升时记录有关信息。
孔底遥测系统测量的参数有:顶角,方位角,造斜器相对终点平面的位置,电阻率测井KC(使用电磁联系通道孔底遥测系统时),自然极化测井ПС(使用电磁联系通道孔底遥测系统时),振动测井ВК,发电机回转频率,孔底温度,辐射功率等。
带有电磁联系通道的孔底遥测系统,安装在孔底动力机的上方,由孔底部分(电子仪器,动力机,接长管,电分离管)和地面仪表(司钻操纵台,天线,接收装置)组成。
带有水力联系通道的孔底遥测系统,包括有孔底部分(孔内仪器,动力机,接长管,动力外壳,脉冲发生器)和地面仪表(管汇压力传感器,接收装置)。地表天线或管汇压力传感器接收的信号,进入接收装置,在此进行放大、滤波和解码。然后,信息进入操作员计算机,以用户方便的任何形式,例如以记录参数的磁带和图像的形式储存起来。
孔底遥测系统是用奥氏体级无磁钢和Д16Т 合金制造的。按照孔底遥测系统通过条件,钻孔弯曲极限强度为1°/m。
在钻进过程中,孔内仪器(见图5)可以测量导航参数和地球物理参数,把含有所得信息解码的电性参数,传给周围岩石。
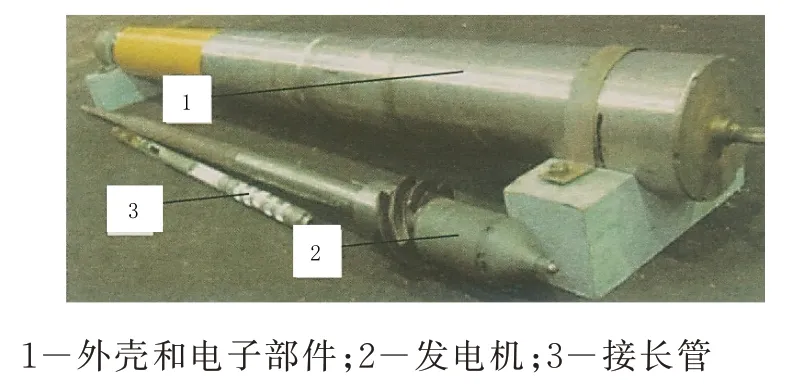
图5 孔底遥测系统孔内部分Fig.5 Downhole components of the downhole remote measurement system
使用水力联系通道的孔底遥测系统时,孔内仪器可以测量并利用脉冲发生器形成压力脉冲,压力脉冲沿着钻杆内冲洗液传播,被管汇压力传感器接收。
利用遥测系统软件可以对信息进行交换、编辑,把测得资料与孔深联系起来,在监测器上以数字和曲线形式实现信息的可视化(见图6)[7-9]。

图6 孔底遥测系统司钻操纵台显示器Fig.6 Display of the downhole remote measurement system at the driller console
孔底遥测系统孔内仪表的供电发动机,属于带有电磁联系通道和水力联系通道的孔底遥测系统的组成部分,用来向孔内仪表供电。这种发电机的技术参数见表 1[7-9]。

表1 孔内发动机技术参数Table 1 Technical parameters of the generator in the borehole
孔内发动机不仅可以用作“萨马尔水平线”科学生产企业生产的水力联系通道遥测系统,而且可以代替水力联系通道遥测系统的锂电池部件。有些孔底遥测系统不使用孔内发动机供电,而是使用独立的电池(见图7)。在这种情况下,孔内仪器的供电问题就与冲洗液的参数和性能没有关系了。该电池的性能参数见表2。

表2 孔内遥测系统发电机电池性能Table 2 Characteristics of the generator battery for the borehole remote measurement system

图7 孔底遥测系统使用的各种连接形式的电池Fig.7 Batteries with various connections for the downhole remote measurement system
对高温、高振和大冲击载荷条件下使用的外壳有严格的要求,故把蓄电池置于玻璃塑料外壳内。电池间用绝缘膏隔开。这种保护的电池,可以在各种复杂条件下安全使用。
3 “伏尔加”设备程序组件
本系统中的“伏尔加”设备程序组件,用于自动检测钻进过程,进行地质-工艺研究和地球物理研究,以便有效控制钻进过程,保证无事故和安全钻进。从地面仪表和孔底遥测系统来的地质-工艺信息,进入采集和初步处理数据的检测器,然后传送给钻场操作员计算机。对所有得到和进来的信息,用专用程序组件进行处理,并实时利用联系通道送到数据服务器保存,可为大量用户服务。利用“伏尔加”组件,可以实时观测钻进过程,甚至可以在远离钻场的地方,用从孔内得到的全部客观信息,控制钻进过程,迅速采取优化钻进措施。可以建立钻孔事故情况和未预见复杂情况的数据库,在专家评价基础上给出准备好的管理决策,从而使工艺错误最小化,提高钻探技术经济指标,减少钻场高水平管理人员的开支。
孔底遥测系统的优点是:利用统一规格化的结构,可以通过改变动力外壳,使用不同直径(90~240 mm)钻杆柱;结构不长且灵活,可以在全角变化率大(1°/m)时进行钻进,并可降低钻柱下部组合装置被卡的危险性;可以在冲洗液循环或停止循环的钻进过程中,测量导航参数和地球物理参数;可以不用从孔底提升遥测系统来进行控制测量方式和从地表传送信息;可以在提升钻具时测量和记录信息并保存到硬盘上;遥测系统可以在静压100 MPa、周围环境125 ℃和冲洗液流量广泛范围内进行工作;遥测系统可以在使用充气冲洗液、空气等负压条件下使用;可以利用水力联系通道进行工作,为此只要把现在遥测系统中使用的脉冲发生器稍作改进即可。
“伏尔加”组件可以测量的参数有:大钩载荷,冲洗液泵压,钻头在孔底的深度,管钳拧卸扭矩,钻头载荷,转盘扭矩,转盘转速,泵冲次,造斜楔(造斜工具)顶角、方位角,冲洗液温度,冲洗液进、出时流量,造斜器位置(造斜器相对钻孔终点平面的位置或钻孔方位角),冲洗液池内的液面高度,发动机转速,冲洗液导电率,孔底温度,冲洗液入口密度,电阻测井KC,自然极化测井ПК,振动测井ВК,伽马测井ГК等。
4 科尔维特(Корвет)孔底遥测系统[7-9]
俄罗斯地质集团公司生产的水力联系通道科尔维特(Корвет)孔底遥测系统,用于在钻进过程中进行测量,以便控制钻孔钻进方向和钻孔剖面地质分层。科尔维特系统包括有遥测探头、地面仪表(见图8)和控制钻孔方向的操作员指示盘(见图9)。图9中操作员指示盘上标出的数据是:钻孔方位角实时数值 247°,钻孔顶角 45°,钻孔深度1568 m。

图8 科尔维特孔底遥测系统外貌Fig.8 Appearance of downhole remote measure system“Korvet”

图9 科尔维特孔底遥测系统操作员指示盘Fig.9 “Korvet”display for the operator
水力联系通道系统中使用了美国APS 公司生产的压力正脉冲回转型脉冲器APS。APS 是防止冲洗液漏失的最稳定的脉冲器之一。
科尔维特孔底遥测系统的装置见图10。

图10 科尔维特孔底遥测系统组件Fig.10 Downhole components of“Korvet”
利用科尔维特孔底遥测系统仪表和软件,可以连续提供钻孔钻进中的顶角、方位角和造斜器安装角度的实时数值。图11 示出了造斜器安装角读数系统的图像和表格资料,用指标和数字表示了钻孔方向变化过程中造斜器实时数值,当前是从202°变到 249°的情况[7-9]。

图11 从计算机显示器得出的遥测信息Fig.11 Remote measured information read from the computer monitor
顶角、方位角实时数值和造斜器安装角的实时图示数值为 202°、247°、248°、245°和 249°
图12 为科尔维特孔底遥测系统得到的钻孔钻进图像资料。该图表示的是孔筒三维坐标图像和相应垂直平面和水平平面的投影,以及孔底的方向。
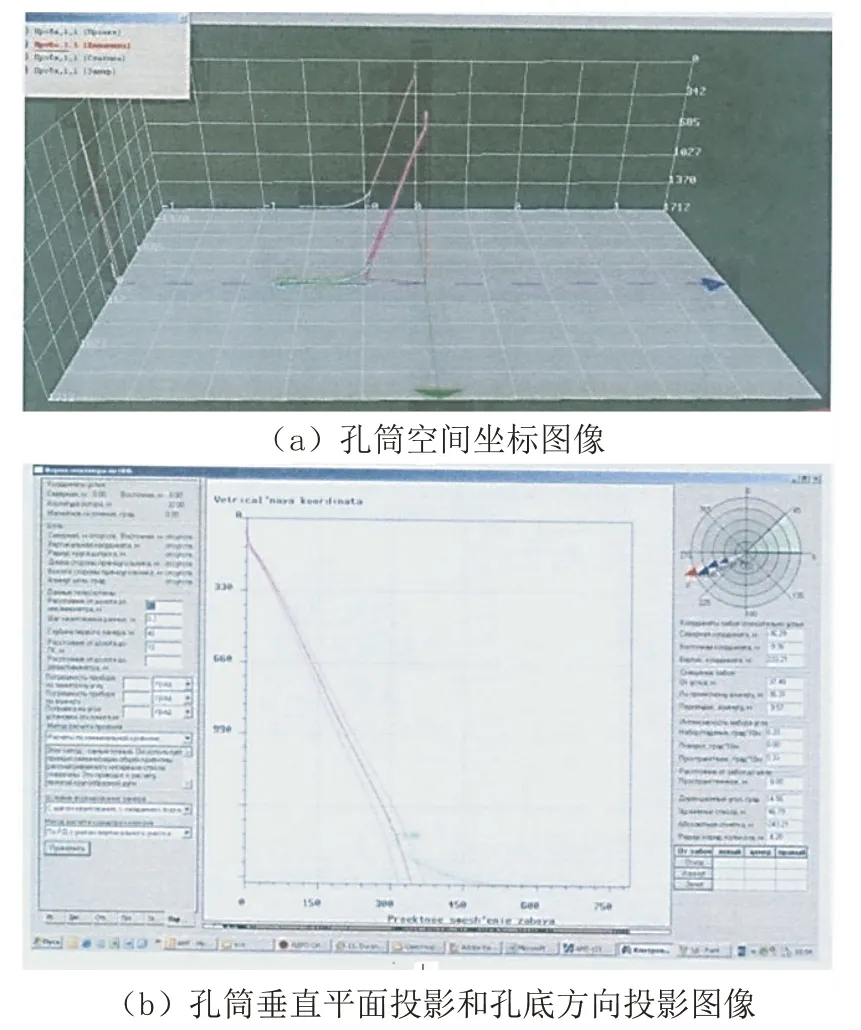
图12 科尔维特遥测系统得到的钻孔钻进图像资料Fig.12 Borehole drilling graphic data from“Korvet”
5 Orienteer MWD 系统[7-9]
Orienteer MWD 系统是格尔斯(ГЕРС)[俄罗斯,特维里(Тверь)市]公司研发的,用于对孔斜、管理进行研究并可对所有类型资料进行采集的系统。这种系统是把孔内水力负脉冲组件和地表信息记录、钻孔钻进管理测量系统集成起来的一个系统(СИРИУС),可以对斜孔、水平孔进行现代化高水平钻进进行指导的系统。利用这种系统可以测量孔斜参数(顶角、方位角、造斜器转动角度)和钻进过程中的其它控制参数,从而可以高质量、高速度完成斜孔和水平孔的钻进工作。
此系统包括孔内仪器部分和地表测量部分。孔内部分见图13。

图13 Orienteer MWD 系统孔内仪器部分Fig.13 Down hole components of Orienteer MWD system
无磁接头(Be-Cu)是连通接头,用于连接Ge‑olink 螺纹组件和客户螺纹组件,包含有适用于直径88.9 mm Geolink 限制件轴套的轴颈。无磁加重钻杆是超薄加重钻杆,用铍(Be)铜合金制成。连接器和矛头是Orienteer 仪器的连接件,可以保证各个组件之间的数据交换和供给电源,还可以使无磁加重钻杆内仪器工作稳定。伽马电子组件可以记录被破碎岩石的自然放射性情况,将其实时发送给SEA 测斜仪,把信息保存在孔内记忆装置中,以便后续地表可视化使用。伽马组件供电组件包含有锂-亚硫酸基氯化物电池,为伽马探测器和电子控制仪表提供电源。计算用测斜仪含有3 个测斜用坐标计算用测斜仪(测斜仪和磁力仪)传感器,可以在0°~180°全程范围内研究孔斜和控制情况。电源包括锂-亚硫酸基氯化物电池,可以给传感器和传送器供电。信号转换器的APC 可以形成电脉冲,传给传送器,以便传送利用水力联系通道记录的数据。无磁接头(Be-Cu)是连通接头。直径89 mm 超薄传送接头可以形成负压序列脉冲,以便把孔内得到的资料传送到地表。传送接头与外壳是一个整体。
地表组件包括:安装在压送线上的压力传感器SPP;安装在孔底遥测系统工作站上的系统接口部件SIB;安装在孔底遥测系统工作站上的台式计算机Geolink。
Orienteer MWD 系统地面数据采集保存系统包括有:安装在泵送线上的压力传感器;安装在绞车轴上的绞车转数传感器;安装在滑车钢丝绳死端上的钢丝绳拉力传感器;安装在钻场内的孔深测量部件;安装在钻场内的分配部件;安装在转盘台上的司钻指示板;安装在泵送线上的流量测试器;安装在工作站内的地面监测部件;安装在工作站内的台式计算机;安装在工作站内的便携式计算机,用以目视检测钻进参数;安装在工作站内的便携式打印机,用以印刷形式传送信息;安装在工作站内的GPRS 或卫星终端,可以以电子或音响方式实时传送信息。
Orienteer MWD 系统工作站进行如下工作。
标准传送器可以依次记录冲洗液压力降低情况,以便把孔内得到的数据传到地表。这种脉冲是因为内阀的开和关产生的,内阀短时开通,可以使少量冲洗液从钻杆柱内部向外部空间流动。所以,钻杆柱内部产生的压力少量变化,可以作为压送线上的压力少许降低被地表记录下来,称之为负压脉冲。
地面系统由为从孔内仪器得到、识别和处理孔内测斜测量所得数据传到地表所需的传感器和设备组成。从孔内组件得到的信号,通过压送线上的压力传感器,进入系统接口部件,在此从压力曲线中自动提取信号,滤波,传送到台式计算机。把得到的信号解码为造斜器、顶角、方位角、温度和孔底设备状态用的测得数值。测得的数值记录在数据库中,实时输送给钻井工程师屏幕上和司钻指示板上。得到的数据也可通过国际版VIDS.0 形式传送给地质部门和管理部门。
6 纳迪尔(Надир)柔杆联系通道孔底遥测系统[7-9]
俄罗斯地球物理科研生产公司研发的柔杆联系通道孔底遥测系统——“纳迪尔”,是用于水平井(段)钻进用的遥测系统,如图4 所示。利用白俄罗斯费德公司生产的连续油杆(coiled tubing)M40 型钻机,可以钻进深度达2000 m 的钻孔。柔杆直径60.3 mm,孔底动力机直径95 mm,定向器直径92 mm。偏离遥测系统最大角度为30'。利用装在钻杆内部的3 根7 股铠装电缆作为“纳迪尔”系统的联系通道。
遥测系统置于无磁管内,利用直径90 mm 的轻合金钻杆(ЛБТ)作为无磁管。

图14 “纳迪尔”连续油管钻进用柔杆联系通道孔底遥测系统示意Fig.14 Downhole remote measurement system“Nadir”for coiled‑tube drilling
“纳迪尔”系统用来测量使用连续油管钻进时的顶角、方位角、遥测系统外壳位置、岩石自然放射性、螺杆动力机上方的冲洗液压力,以及轴载和管外压力等。
“纳迪尔”系统包括有:
ОРБИ 型测斜组件,用来测量顶角、方位角、测斜系统外壳相对终点平面的位置(精度为1.5°);
伽马测井和内部压力表组件,用以测量岩石的自然放射性和孔底动力机前面冲洗液的压力;
轴载和管外压力组件,用以测量轴载和管外压力;
伸缩式矛头;
地表处理组件,可以保证遥测系统的供电、接受来自孔内仪器的数据、对数据进行处理和可视化处理和对得到的数据的记录。
所有孔内仪器的外径均为36 mm,总长度5.5 m,可以将其装置在1 根轻合金钻杆内。同时,环状最小间隙为17.5 mm,可使冲洗液的水力动力阻力最小。
测得的内外压力差为2.5~4.1 MPa,是孔底动力机和钻头上的压力降,据此可以判断钻进过程。
伽马测井通道用来判断钻进地层和地球物理研究结果的相关程度。必要时,遥测系统可以用其它地球物理组件补充。
此外,测量组件是用柔性扶正器连接起来的,柔性扶正器同时还可抵消径向和轴向载荷。除了顶角和方位角是在钻进过程停止时测量的以外,被测量的参数都是在钻进过程中连续传送的。
孔内测量组件是使用国内优质或国外进口的抗振、抗冲击和可靠性高的材料制成的。
软件程序包括有以下组件:记录和初步处理测斜、地球物理和工艺参数组件;实时可视、矫正钻孔轨迹组件;地球物理参数实时可视化组件;工艺参数实时可视化组件;绘制钻孔设定轨迹组件;同时生成各个钻孔积累数据库及其可视化组件。
利用“纳迪尔”系统可以指导用连续油管钻机进行钻进,实时得到地质工艺信息和地球物理信息,对钻进工艺进行有效控制。
7 讨论与建议
(1)地质钻探中,由于地层条件和工艺技术因素的影响,实际的钻孔轨迹往往偏离设计的钻孔轨迹。因此,必须采取纠偏措施。
(2)为了提高钻探效率、保证钻孔质量、提高技术经济指标,需要及时掌握孔底实时位置(孔深)、顶角、方位角以及造斜器具在孔底的安装角度等,为此需要使用遥测系统。
(3)俄罗斯“领航员”遥测系统科研所的科研人员,把信息、工艺、自动导航结合起来,开发出了钻进用信息-工艺-自动导航系统,可以指导受控钻孔钻进的顺利进行,是个创新技术,值得我们研究、探讨和确认其科学性和有效性。
(4)俄罗斯地质集团公司生产的水力联系通道科尔维特(Корвет)孔底遥测系统,用于在钻进过程中进行测量,以便控制钻孔钻进方向和钻孔剖面地质分层。利用科尔维特孔底遥测系统仪表和软件,可以连续提供钻孔钻进中的顶角、方位角和造斜器安装角度的实时数值。
(5)格尔斯(ГЕРС)〔俄罗斯特维里(Тверь)市〕公司研发的Orienteer MWD 系统,用于对孔斜、管理进行研究并可对所有类型资料进行采集。这种系统是可以对斜孔、水平孔进行现代化高水平钻进进行指导的系统。利用这种系统可以测量孔斜参数(顶角、方位角、造斜器转动角度)和钻进过程中的其它控制参数,从而可以高质量、高速度完成斜孔和水平孔的钻进工作。
(6)俄罗斯地球物理科研生产公司研发的柔杆联系通道孔底遥测系统“纳迪尔”,是用于水平井(段)钻进用的遥测系统。利用白俄罗斯费德公司生产的连续油杆(coiled tubing)M40 型钻机,可以钻进深度达2000 m 的钻孔。
(7)这些孔底遥测系统在俄罗斯相关条件下钻进中都进行了试验与应用,取得了一定的效果,或许对我国有关单位和部门有一定的参考价值,值得借鉴。
猜你喜欢
爆炸与冲击(2024年6期)2024-10-31 00:00:00
冶金设备(2021年2期)2021-07-21 08:44:22
制造技术与机床(2019年8期)2019-09-03 01:14:28
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
科学与财富(2018年21期)2018-08-22 19:31:06
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
设备管理与维修(2016年7期)2016-04-23 06:51:39
山西建筑(2016年27期)2016-04-06 19:50:20
大型铸锻件(2015年4期)2016-01-12 06:35:13
