基于专利分析法的生姜机械化种植技术研究进展分析*
2022-04-24 12:55林云龙杨发展李维华
中国农机化学报 2022年4期
林云龙,杨发展,李维华, 2
(1. 青岛理工大学机械与汽车工程学院,山东青岛,266520; 2. 山东省农业机械科学研究院,济南市,250100)
0 引言
姜是药食两用作物,其所具有的抗肿瘤、抗氧化、止呕、抗炎、抑菌等药理作用受到了国内外广泛关注[1-4]。生姜的生产作业流程主要包括耕地、开沟、培土、播种、施肥、田间管理以及收获。目前生姜的播种环节以人工作业为主。随着栽培技术的不断发展,特别是通过调研安丘市所在的潍坊地区鲜食嫩姜早春促成栽培技术采用大拱棚三膜/四膜覆盖栽培,可实现鲜姜一年两茬上市(6—8月、10—11月)[5],这就要求生姜播种的高效性与时效性。此外,据2021年最新统计结果显示,虽生姜种植面积增加,但产量下滑[6]。以生姜机械化种植技术促进生姜产量上涨,带动市场回温迫在眉睫。
针对生姜播种机械研发,印度学者设计了两种基于生姜姜种特性的计量装置,并对其适用机具进行了匹配[7]。针对生姜机械化播种难以实现“鳞芽朝向一致”农艺要求的问题,侯加林等[8]提出了一种采用深度学习实现鳞芽快速识别的方法。但采用机械化手段实现生姜种植的相关研究较少,生姜种植机械仍处于研发阶段,因此,总结生姜机械化种植技术发展现状并阐述生姜机械化种植重难点对实现生姜自动化精准种植具有重大意义。
通过调研该领域的专利申请情况,可以快速了解一些专家学者在该领域的研究状况。基于专利分析法探究生姜机械化种植发展现状及趋势,以期为相关企业及科研人员提供借鉴。
1 数据来源与分析方法
1.1 数据来源
一台多功能的生姜种植机可以集松土、开沟起垄、施肥、播种、覆土以及覆膜等多种工序,并且,可以根据工况的不同调节相对应的工作参数,故为了更全面的搜集专利数据,文章在IncoPat专利数据库中以“生姜、种植、装置”为关键词进行初检,通过阅读相关专利后,以“开沟、施肥”为扩充关键词再次检索。最后经筛选得到从2012年10月21日至2021年1月22日的有关专利共计66条。
1.2 分析方法
通过建立生姜机械化种植专利分析体系,从宏观和微观两个方面对生姜机械化种植技术进行分析。其中宏观分析重点描述技术随时间的变化趋势以及技术空间分布;微观分析则主要阐述技术研究重点以及技术演化趋势,分析框架如图1所示。

图1 生姜机械化种植技术专利分析框架Fig. 1 Patent analysis framework of ginger mechanized planting technology
2 生姜机械化种植专利宏观分析
2.1 技术时间分布
通过生姜机械化种植技术相关的专利申请发展趋势(图2)可以发现,本领域相关专利较少,我国专利申请从2012—2016年变化较小,并且每年的专利申请数量不超过5个;从2016—2017年出现小幅度增长,专利申请数量达到9个;从2018—2019年增长幅度最大,专利申请数量达到20个,是2017年专利数量的2.2倍;但从2019—2020年出现下降趋势,其原因可解释为生姜机械化种植技术出现瓶颈,需要有突破性创新促进其发展。
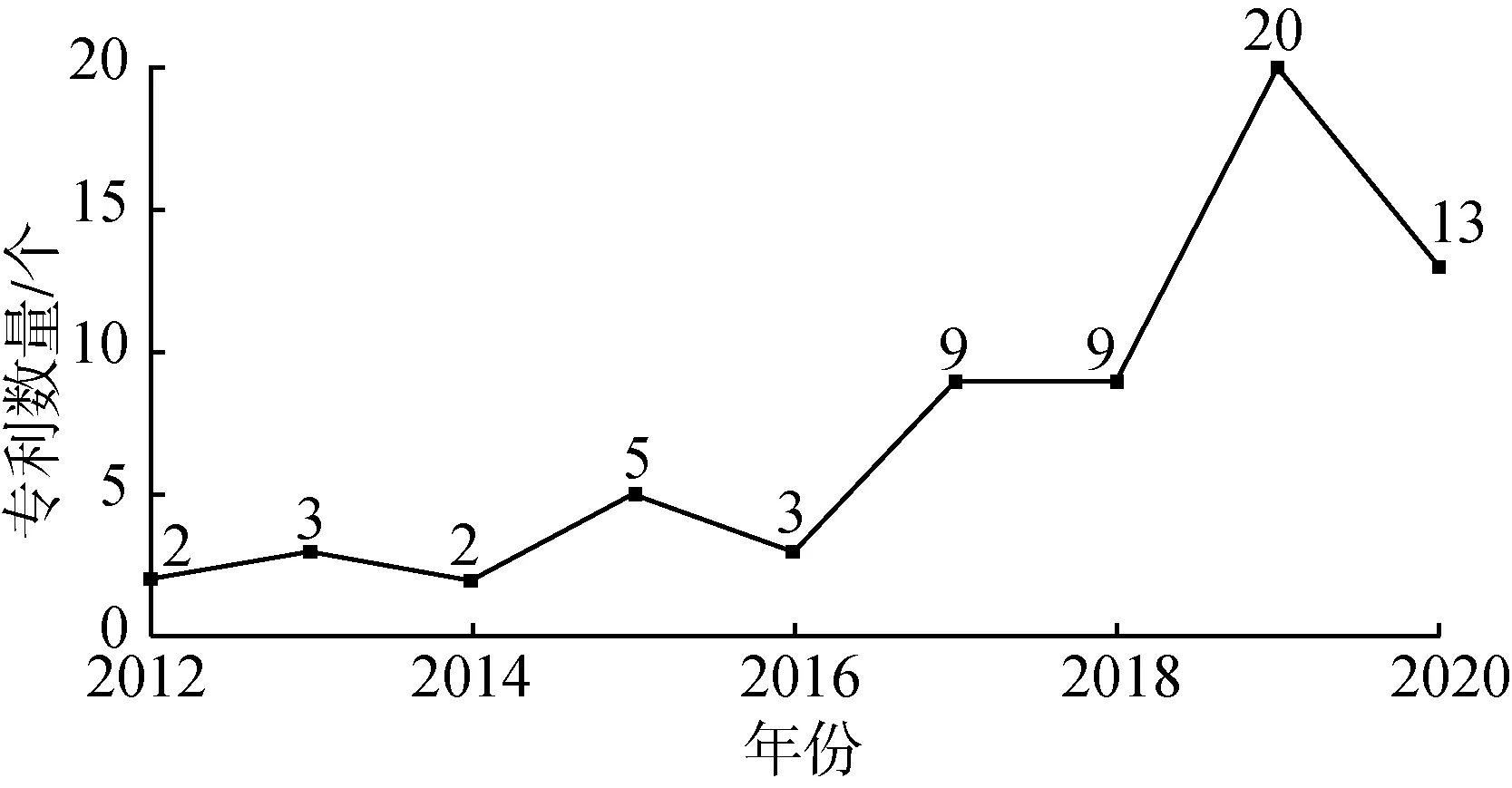
图2 专利申请趋势Fig. 2 Trend of patent applications
2.2 技术空间分布
生姜机械化种植技术领域的专利申请地区构成分析如图3所示。专利申请数量最多的是山东省,其次是重庆省,其专利申请数量分别为32件和13件,占全国专利总数量的比例分别为48.48%和19.7%。中国生姜分布很广,南方以广东、浙江、安徽、湖南和四川等省种植较多,北方山东省栽培面积最大[9]。生姜机械化种植技术领域的专利申请地区结果表明,其专利申请数量呈现“适应需求”的趋势;此外,山东地区的生姜种植以条沟种植模式为主,由此可知,以条播作业的生姜种植机械数量较多。

图3 专利申请地区分布Fig. 3 Regional distribution of patents
3 生姜机械化种植专利微观分析
3.1 技术研究重点
表1为生姜机械化种植技术领域相关专利的IPC技术构成(前10)。IPC分类中A01C5/06和A01C5/04所占比重最大分别为27.78%和19.44%,这两项专利的技术内涵均与耕整机械有关。由此可见,生姜种植机械逐渐向满足低损伤等株距农艺要求方向发展。

表1 生姜种植机械专利IPC技术构成(前10)Tab. 1 IPC technology composition of Ginger planting patent machinery (top 10)
此外,IPC分类号从A01C9/00到A01C9/08和A01B49/04的转变反映出生姜种植机是在原有马铃薯种植机的基础上,采用新型播种部件及装置发展而来的。马铃薯机械化种植主要关注于分离整列拾取技术,通过排种器的整列拾取装置实现马铃薯的低损伤等株距播种[10]。由此可见,生姜机械化种植开始关注于低损伤等株距播种。
IPC分类号为A01C9/02的专利技术内涵表明,不同于马铃薯种植机,生姜种植机采用输送的方式实现播种作业环节。此外,IPC分类号为A01B33/02和 A01B33/08分别与耕作机具和传动装置有关,这表明生姜种植机面向多功能一体机方向发展;IPC分类号为A01C11/02的技术内涵表明,生姜播种作业环节逐渐重视种姜鳞芽的朝向问题。
综上所述,生姜机械化种植经历了三个过程,即机械开沟覆土+人工播种、基于农艺要求的低损伤机械化种植、基于鳞芽控制的输送式机械化种植。生姜机械化种植技术的研究重点为耕整机械和播种机械,并且生姜种植机械趋于多功能一体化方向发展。
3.2 技术演化分析
3.2.1 耕整机械专利演化分析
姜种播种技术要求如图4所示,首先在整平耙细的地块上开沟起垄,一般沟距设计为700~750 mm、沟宽230~280 mm、沟深130~170 mm;其次保证株距200~250 mm、行距700~750 mm,将姜种平放入沟内,使幼芽方向保持一致;最后覆土30~40 mm,以该农艺要求的安丘生姜获得了较高的产量[11]。由此可见,生姜种植用耕整机械主要包括开沟机械和覆土机械。
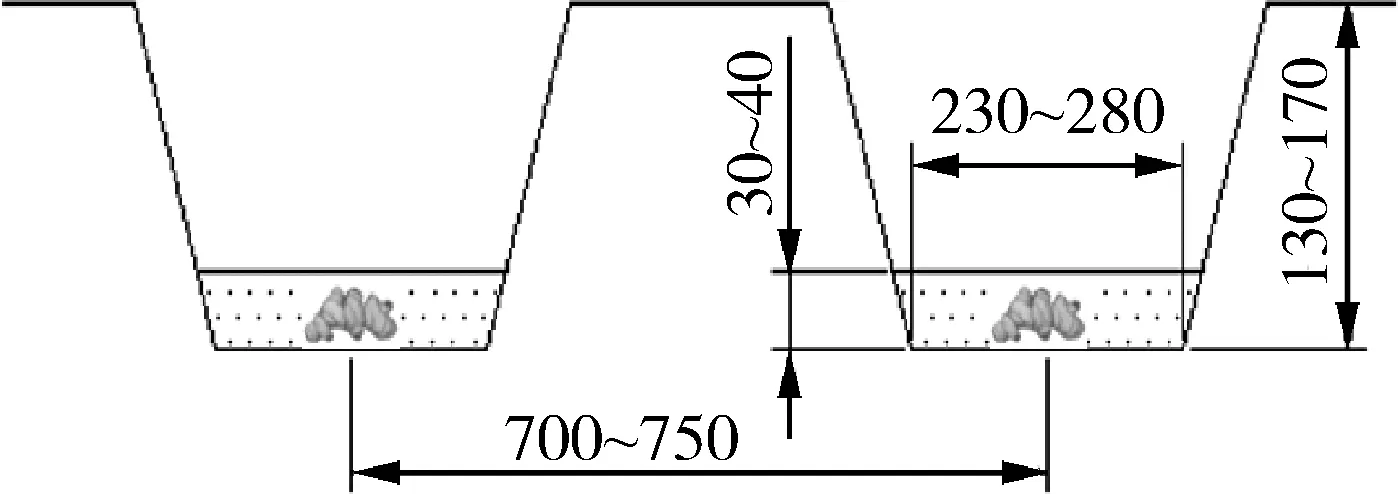
图4 姜种播种技术要求Fig. 4 Technical requirements for ginger seed sowing
将生姜耕整机械划分为开沟机械和覆土机械;同时为表明技术不同时间段的发展状况,以同族专利数量为指标挑选不同时间段内的核心专利;根据时间发展顺序挑选出生姜耕整地机械专利,如表2所示。

表2 生姜耕整机械专利演化Tab. 2 Patent evolution of ginger tillage machinery
对于生姜种植用开沟机械,采用条沟种植模式的开沟机械其工作部件主要分为犁铧式与旋转刀片式。单独采用犁铧式开沟器在土质过硬的情况下很难保持沟形。因此,为保证不同土壤紧实度下开沟作业的均匀性,提出了两种方案:一是松土后采用犁铧式开沟器开沟,二是采用旋转刀片式开沟器开沟。
王培洪等[12]于2015年提出的一种牵引式大姜种植开沟机和廖钦洪等[13]于2017年提出的生姜开沟起垄机均采用第一种方案降低了土壤硬度对犁铧式开沟器的负面影响。不同的是,后者提出的生姜开沟起垄机加设打眼装置,可以在旋耕松土后进行土壤深处打眼,实现了肥料深施的目的。
采用第二种方案的机具为宋健鑫[14]于2015年提出的一种生姜种植开沟机、邹勇等[15]于2017年提出的生姜开沟机和姜海龙[16]于2020年提出的一种大姜开沟机用泥铲。前两者实现开沟作业的同时通过加设其他部件如覆土机构、灌溉机构等实现了多种功能。在开沟部件设计上与前两者不同的是,姜海龙提出的大姜开沟机用泥铲采用中空结构设计,包括其内部配置的可活动轴芯杆以及细螺杆、导向块和导滑轨等部件,通过可活动轴芯杆的移动实现铲距的调节,满足了生姜种植过程中不同沟距的要求。
相较于第一种方式而言,采用旋转刀片式开沟器具有碎土破土效果好、更易保持沟形、一次性开沟成形等优点,是生姜种植开沟作业的首选。此外,针对生姜浅窝种植模式,姜玉松等[17]于2018年提出的可调节开槽装置,通过调节配重套杆上配重块的重量和数量调整开槽深度,进而实现不同土壤硬度的开槽作业。综上所述,以条沟种植模式的开沟机具占多数;生姜开沟机械演化分析表明,生姜机械化开沟作业具有以下发展趋势。
1) 采用可调节设计,实现不同深度、沟距的开沟作业。
2) 采用旋转刀片式工作部件,保证沟形一致性。
3) 采用一机多用设计,将多种部件集于一体,实现多功能一体化。
针对生姜覆土作业环节,同样可分为两种机械化作业方式:一是采用机械结构直接覆土;二是采用取土装置与覆土机构以“取土—碎土—覆土”工作流程完成覆土作业。
采用第一种作业方式的机具为李金鹏[18]于2017年提出的姜沟覆土机和李赞松等[19]于2019年提出的自动覆土机。前者采用覆土刀并通过行走导向轮和辅助行走轮的升降调节满足不同深度的姜沟覆土;而后者采用可调节设计的铧式犁及导向轮实现不同沟宽、沟深和覆土厚度的覆土作业。相同的是,两者均采用“骑沟作业”的方式实现不同工况下的覆土作业。但是采用机械结构直接覆土可能会导致大块土壤覆盖姜种损伤鳞芽。
姜种出苗率受覆土均匀性的影响,如果覆土厚度超过5 cm(通常覆土厚度在3 cm左右为宜),就会导致姜种鳞芽长势缓慢,出土较晚,进而导致生姜出苗不齐[20]。因此,针对该问题研发了采用第二种作业方式的机具如邹勇等[21]于2019年提出的钻穴覆土装置和谢艳云[22]于2021年提出的碎土覆土装置。前者采用分散桶将土壤分散到各个方向并用多个覆土刷转动覆土,实现均匀覆土,提高生姜存活率;后者采用钻头和破碎轮实现钻穴碎土,通过螺旋输送架将破碎的土壤传送到盖土机构的抖动框内,再由抖动框将土壤抖落在生姜的表面,实现生姜低损伤覆土的同时提高覆土均匀性。
综上所述,生姜种植覆土作业具有鳞芽损伤和覆土不均匀引起出苗率降低等问题;生姜覆土机械演化分析表明,生姜机械化覆土作业具有以下趋势。
1) 采用可调节设计,实现不同工作参数下的覆土作业。
2) 细化覆土作业流程,将土块碎散后实现低损伤均匀化覆土。
3.2.2 播种机械专利演化分析
按照导种部件作业方式,基于物体自由度约束概念将生姜播种机械划分为欠约束式播种机械和全约束式播种机械[23]。根据时间演化如表3所示。
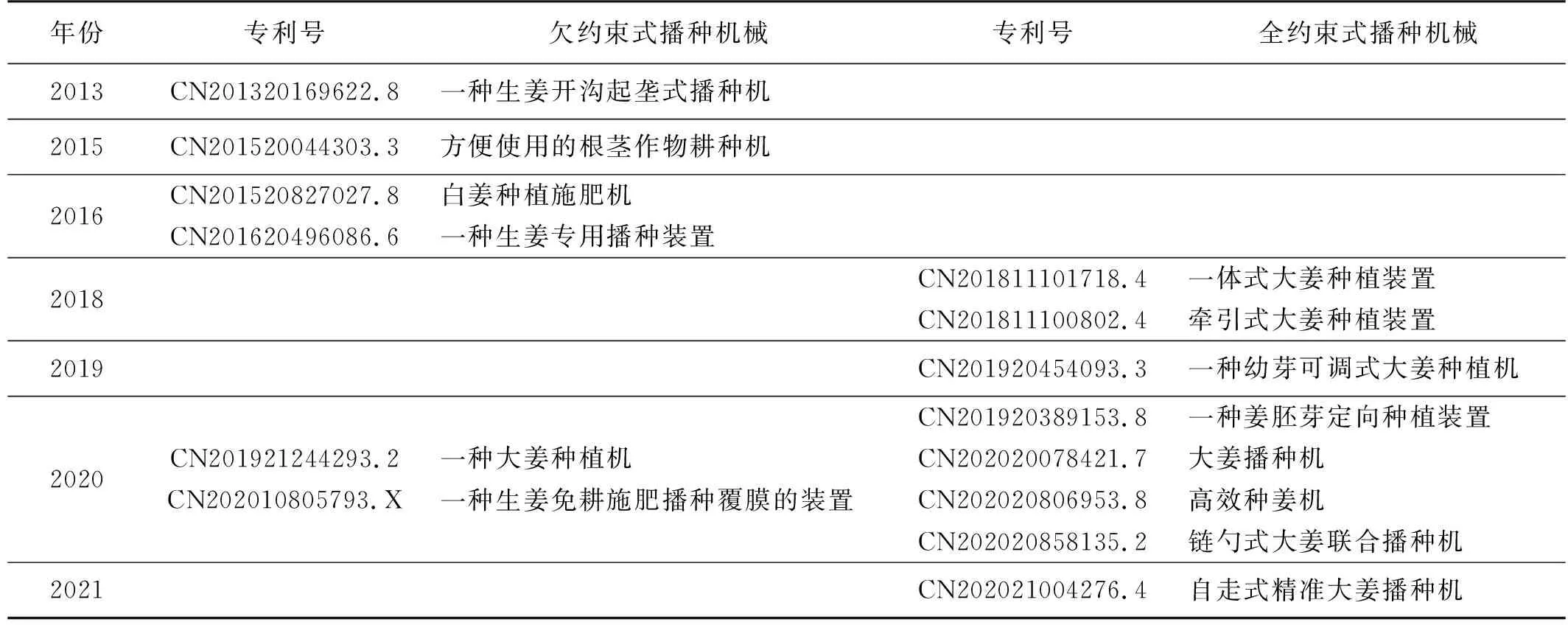
表3 生姜播种机械专利演化Tab. 3 Patent evolution of ginger seeding machinery
欠约束式生姜播种机械的播种装置大都是由一漏斗状的种箱和其内部的拨种送种部件组成,通过拨种送种部件实现生姜的播种作业。
如图5所示,马荣朝等[24]于2013年提出的生姜开沟起垄式播种机,采用链式传动带动排种勺转动取种,多个姜种勺递送姜种至排种管实现播种作业。该生姜播种机采用了马铃薯种植机的链勺式分离整列拾取装置[10],不同的是姜种勺采用柔性设计,降低了鳞芽的损伤。但是,相较于马铃薯,姜种形状不规则,过多的姜种更易在种箱内结拱进而造成漏种现象。
为改善播种效果,吴熠[25]于2015年提出的一种根茎类种植机及苏义海[26]于2016年提出的白姜种植施肥机将种植部件简化为种箱与导种管的组合设计进而降低漏种率。不同的是,前者由人工将姜种放置于种箱内实现单行种植,后者由姜种直接下种进行播种;相较而言,前者播种效果好但效率低,后者效率高但重种率较高。但是该类种植机使块状姜种从出料口直接掉落到种植沟中,可能会导致姜种滚动进而造成株距不一致,影响姜的生长。因此,王德高等[27]于2016年提出的一种生姜专用播种装置(图6),其下种部件包括带有下种槽的储种料斗,以及具有接种槽(装有压块)、挡种环板的布种辊,通过挡种环板防止姜种下落到接种槽最低点过程中的掉落,运用接种槽中的压块将姜种压实在土壤中,防止姜种滚动移位。但该播种装置的供种环节完全靠姜种重力实现,若储种料斗中姜种过多会引起姜种之间碰撞挤压造成姜种及鳞芽损伤;若姜种过少会导致姜种很难成功下种。
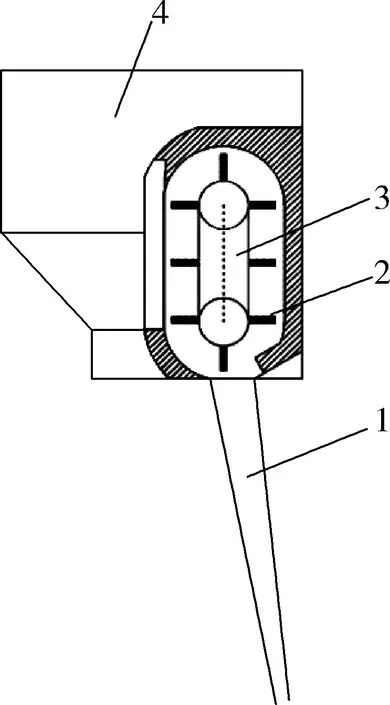
图5 生姜开沟起垄式播种机Fig. 5 Ginger ditching and ridged planter1.排种管 2.排种网 3.链勺式播种器 4.种箱
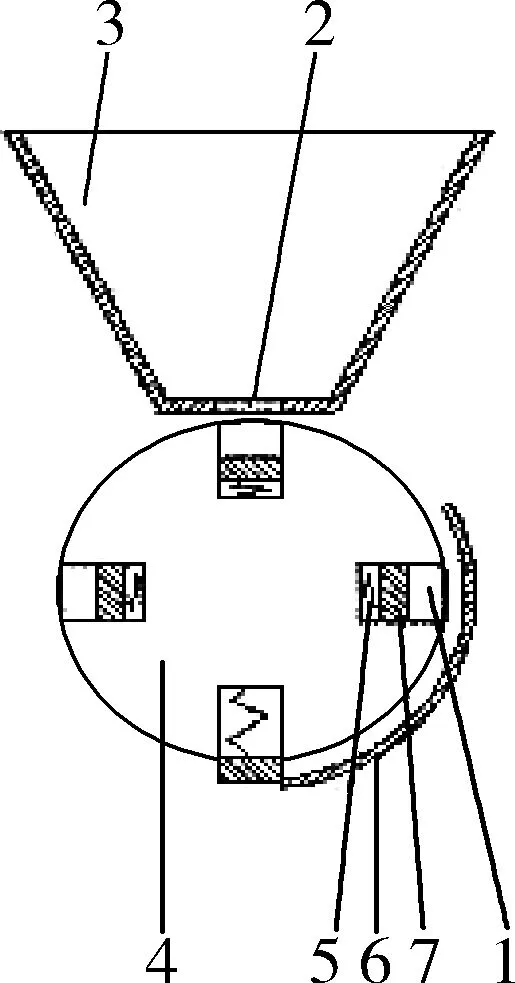
图6 生姜专用播种装置Fig. 6 Special seeding device for ginger1.接种槽 2.下种槽 3.储种料斗 4.布种辊 5.弹簧 6.档种环板 7.压块
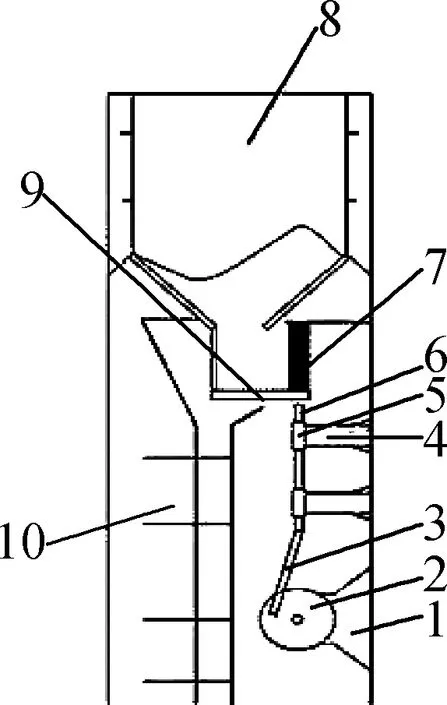
针对供种环节,如图7(a)所示,姜海龙[28]在苏义海[26]的研究基础上对白姜种植机进行了改进,采用偏心轮连杆机构实现升降导杆上下往复运动,通过复位弹簧的复位作用进而控制存储罐开口的闭合,实现了自动拨料功能;如图7(b)所示,郑杰恺[29]提出的免耕播种装置采用带式输送的方式实现送种功能,通过调整变速箱档位可以改变姜种的投放间距,满足不同株距的播种要求。两者均采用机械结构实现了动力式供种,减少了供种环节对姜种的损伤,但还未实现动态供种,无法精准地控制供种数量进而导致重漏种率上升。
由此可见,欠约束式生姜播种机械主要存在姜种及鳞芽损伤、姜种滚动引起播种均匀性降低和姜种结拱或堆叠导致重漏种率上升等问题。欠约束式播种机械专利演化分析表明,该类生姜播种机主要关注生姜播种作业的供种和取种环节,其发展趋势可总结如下。
1) 通过改进排种器设计,实现低损伤均匀播种。
2) 结合动态供种技术,实现姜种供种环节的精量控制。
(a) 偏心轮连杆
(b) 输送带式图7 供种装置Fig. 7 Seed feeding device1.动力旋转电机 2.旋转圆盘 3.传动连杆 4.支臂 5.导向套 6.升降导杆 7.复位弹簧 8.姜种存储罐 9.堵料板 10.接料机构 11.播种挡板 12.输送机构 13.种箱 14.带—齿轮传动系统 15.电机 16.变速箱 17.齿轮传动系统 18.凸轮机构 19.落料口
全约束式生姜播种机械通常采用带(链)式输送装置以机构取种或人工放种的方式实现生姜的播种作业。根据其播种原理可分为针扎式[30]、带输送式[31-36]和链勺输送式[37-38]。
现有的栽培技术要求生姜播种时,应将鳞芽向阳放置,保证鳞芽获得充足光照,促进生姜生长的同时也易于后期收获[39]。针扎式播种原理图如图8所示[30],基于识别技术通过电机带动旋转轴转动一定角度以实现鳞芽的方位调节;采用气缸控制带孔板的运动将插取的姜种放置于种沟内实现生姜播种作业[30]。但此装置采用的针扎式抓取会对姜种造成损伤,而生姜选种技术要求表明,在生姜种植过程中,若出现姜种机械损伤会增加姜瘟病的发病率[40]。该生姜种植机实现了自动化播种,但其取种放种过程损伤了姜种,对生姜产量有一定影响。姜瘟防控技术表明在姜种创口处涂蘸新鲜、清洁的草木灰可以实现姜种消毒,避免姜种带菌,减少姜瘟病发病风险[41]。在该生姜种植机上加设草木灰喷洒装置是改善其长期作业效果的方法之一。
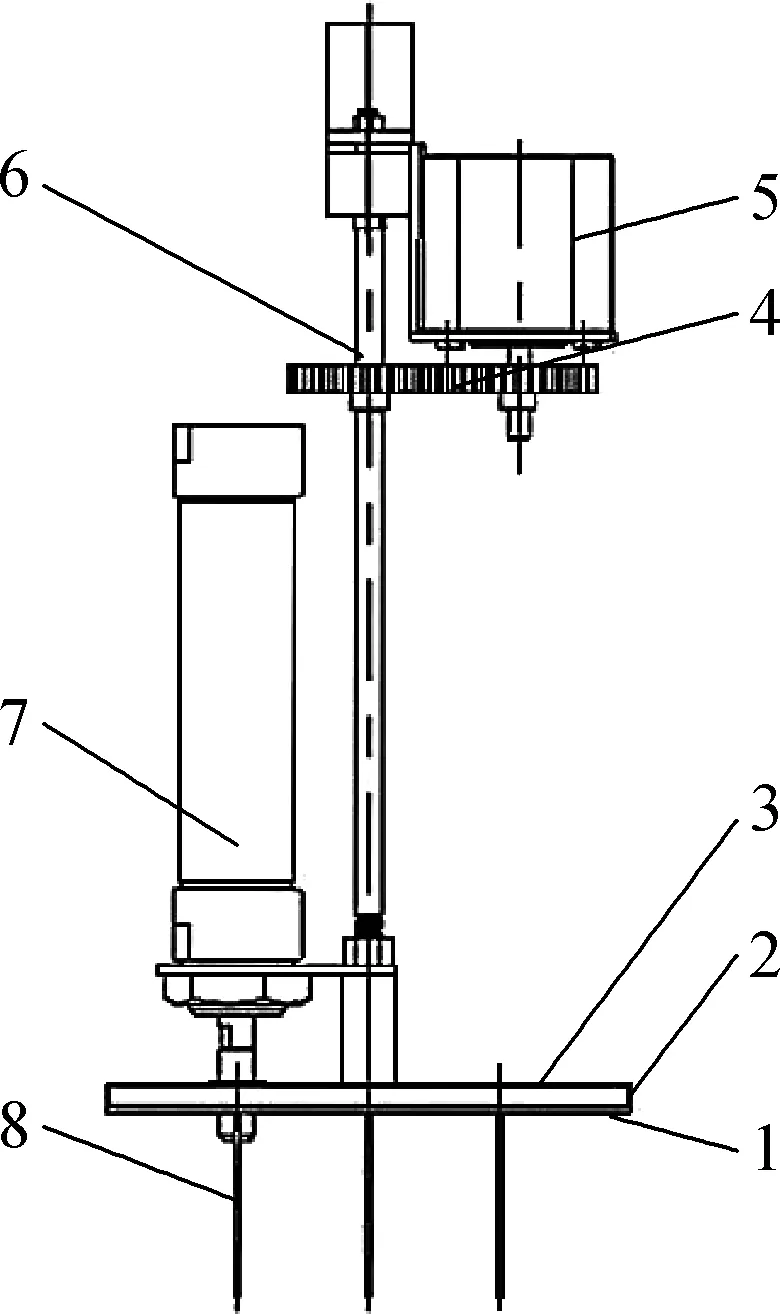
图8 针扎式播种原理Fig. 8 Needle seeding principle1.带孔板 2.带针板 3.双层插板 4.齿轮机构 5.小步进电机 6.旋转轴 7.微型气缸 8.插针
带输送式播种原理图如图9所示,该播种装置一般采用倾斜设计,确保了姜种平稳落到姜沟底部,避免姜种翻滚、碰伤鳞芽;输送带上一般设有呈“V”形的姜种夹用以人工放置姜种,输送装置末端可设置柔性限位装置以保证下落平稳,并将已覆土的姜种抚平,确保其方位与放到播种皮带上时的初始方位相同。采用此原理的生姜种植机以自走式结构设计为主,结构布置紧密体型小,适用于生姜种植的条播作业。

(a) 主视图
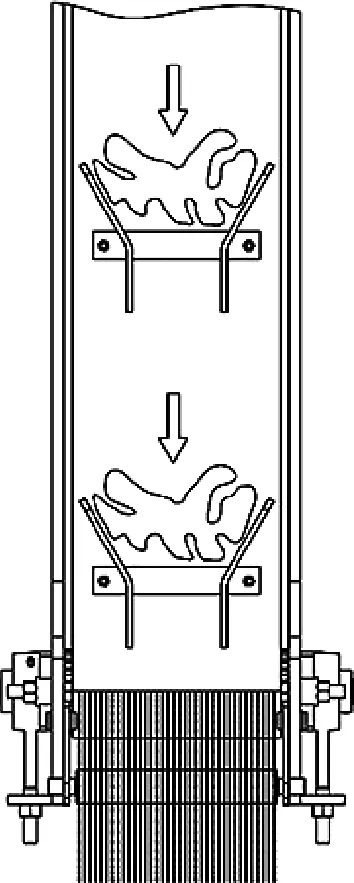
(b) 局部侧视图图9 带输送式播种原理Fig. 9 Belt conveyor type seeding principle1.主动辊 2.输送带 3.姜种夹 4.张紧机构 5.从动辊 6.柔性限位装置
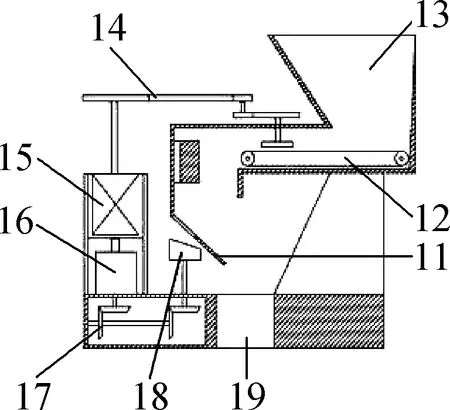
此外,王振[33]提出的一种胚芽定向种植装置采用两段式输送的方式,在第一输送装置与第二输送装置之间加设姜种调整装置以实现鳞芽方位的控制调节;该姜种调整装置由电机提供动力实现竖直方向的升降将托盘顶起并吸附,同时由水平方向的旋转以调整托盘方位进而实现鳞芽的调向。
链勺输送式播种装置利用链式输送实现姜种的循环输送投放,采用姜种勺实现姜种姿态的保持,通过调节位于输送链条上各个姜种勺的间距可实现不同株距的种植要求;由人工放置姜种于姜种勺中,在输送链的带动下完成播种作业。马来西亚学者早在2012年就提出了采用此原理的生姜种植机,从人工种姜平均速率100~167 m2/h提高到近1 000 m2/h,播种效率提高到原来的6~10倍[37];但该生姜种植机的播种装置于竖直方向倾斜一定角度放置,结构较为笨重。
如图10所示,侯加林等[38]提出的链勺式大姜联合播种机将支撑架设计为平行四边形结构,并采用换向齿轮使输送链条运动方向与机具行进方向相反,姜种勺利用率得到提高的同时增加了结构紧凑性。
全约束式生姜播种机械针对鳞芽控制的精准种植采用了两种方法:一是采用针扎式播种原理实现生姜的自动化播种;二是采用人工辅助放种、带(链勺)式输送的方式实现生姜的半自动化播种。相较于前者而言,后者更能实现生姜的低损伤播种;针对排种均匀性,对于带输送式和链勺输送式,姜种在输送过程中的速度分析图如图11所示。

图10 链勺输送式播种原理Fig. 10 Chain spoon conveyor type seeding principle1.链轮Ⅰ 2.支撑杆Ⅰ 3.姜种勺 4.支撑杆Ⅱ 5.链轮Ⅱ 6.链轮Ⅲ 7.输送链条
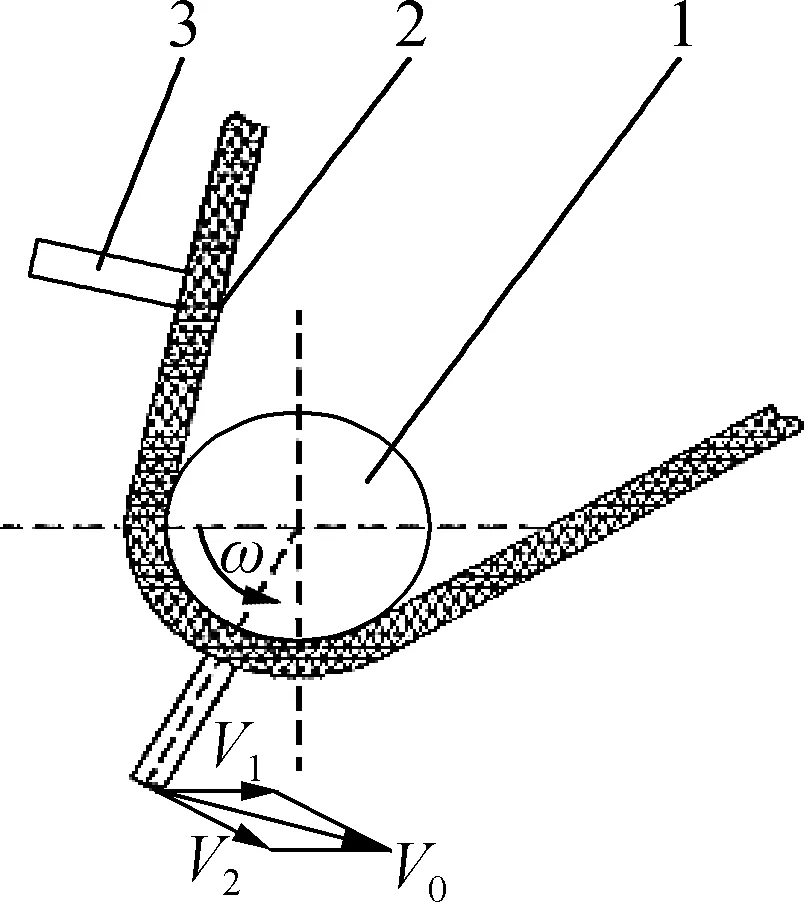
(a) 链勺输送式
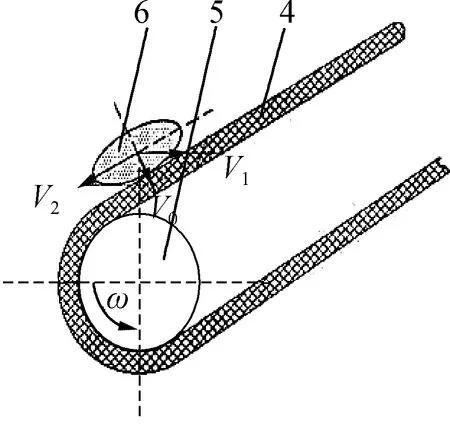
(b) 带输送式图11 姜种速度分析图Fig. 11 Ginger speed analysis chart1.从动链轮 2.输送链 3.姜种勺 4.输送带 5.从动辊 6.姜种
姜种释放于种沟的运动是一个合成运动,故姜种相对于地面的绝对速度满足

由全约束式生姜播种机械演化图可知,采用带输送式播种原理的相关机具占多数;相较于自动化种植,以人工辅助放种的半自动化作业方式更适用于生姜低损伤种植。但该种植方式作业效率取决于人工放种的快慢,播种效率较低,还需进一步改进。全约束式生姜播种机械主要关注播种作业的导种和投种环节,其发展趋势可总结如下。
1) 结合鳞芽识别技术,实现生姜自动化精确播种。
2) 采用柔性设计,降低对鳞芽的损伤。
3) 结合零速投种技术,实现生姜低损伤均匀播种。
总体来看,欠约束式播种机械因其鳞芽损伤率高及播种均匀性低等问题逐渐被全约束式播种机械取代。生姜机械化播种的关注点从供取种环节到导排种环节转变,对鳞芽的精准控制越发重视。
综上所述,生姜机械化种植主要涉及开沟作业的参数可调节化、覆土作业的低损伤均匀化、播种作业的精准控制化;为满足生姜机械化种植要求,应做到以下三点。
1) 实现多种功能的一体化。如加设镇压辊可将沟背压实,减少因灌溉种植沟塌陷的风险。地膜覆盖后可提升地温,故可提早生姜播种期,提高生姜的产量[42]。肥料深施不仅减少用肥量,提高肥料利用率,而且增加了农作物的产量[43-44]。实现多功能一体化具有结构紧凑、统一作业、低耗高效等优势,将多种功能集中的生姜一体化种植机适应机械化种植发展的大趋势。
2) 实现农机农艺高度融合的生姜低损伤种植。采用新型结构及柔性设计将低损伤种植贯彻生姜机械化种植的各个环节。
3) 实现精准控制的生姜智能化种植。将生姜播种作业环节细分为供种、取种、导种和排种环节,运用动态供种技术、柔性加持技术、平稳控制技术以及零速投种技术逐步实现生姜播种作业的高效智能化。
4 结论
1) 通过专利申报的统计结果可以看出,生姜机械化种植技术目前处于萌芽阶段,相关技术研发进展缓慢。生姜种植机械专利IPC技术构成统计结果显示,生姜机械化种植技术研究重点为耕整机械和播种机械。
2) 生姜种植用耕整机械主要包括开沟机械和覆土机械,开沟作业机械逐渐向多功能、参数可调节方向发展,覆土作业机械逐渐向低损伤均匀覆土方向发展。
3) 生姜播种作业机械主要有“欠约束式”和“全约束式”两种,欠约束式播种机械具有自动化、操作简便等特点,但其姜种损伤率较高,播种均匀性较低;全约束式播种机械具有播种均匀性较高、鳞芽朝向一致率高等特点,但目前以半自动化为主,需要人工放种,作业效率较低,研发一种柔性夹持姜种取放装置或许是实现自动化播种作业的关键。
4) 生姜播种过程中存在较多难点:姜种滚动引起播种株距不均匀、机械作业引起姜种损伤以及鳞芽一致向阳放置等。尤其是在姜种的精量播种朝向问题上,现有的“针扎式”播种装置还未实现姜种的低损伤播种作业。动态供种技术、低损输种技术、鳞芽定向控制技术是实现生姜机械化种植高效性与时效性的关键技术。
猜你喜欢
果农之友(2021年4期)2021-06-29
风流一代·青春(2019年5期)2019-05-17
家庭科学·新健康(2019年2期)2019-03-18
文苑·经典美文(2017年7期)2017-07-26
江苏农业科学(2016年11期)2017-03-21
江苏农业科学(2016年7期)2016-10-20
现代园艺(2016年17期)2016-10-17
农家顾问(2014年2期)2014-05-27
湖北农业科学(2014年1期)2014-03-22