
风力发电机叶片无人机检查路径规划技术研究
2022-04-20 08:50杨洵宗
中国设备工程 2022年7期
杨洵宗
(苏州热工研究院有限公司,江苏 苏州 215000)
1 前言
多旋翼无人机结构简单,具备较好的悬停性能,且具有一定的负载能力,可以垂直起降,对场地要求小,被广泛运用于电力巡检、测绘等场合。
20世纪90年代以后,MEMS技术开始成熟,多旋翼无人机采用MEMS器件作为传感器,经过微处理器处理后发出电机控制信号控制电机产生升力和扭力,以达到控制飞机的目的。早期的MEMS陀螺仪通常是单轴的,来自法国的一个开源项目KK飞控用三个陀螺仪互成90°夹角的方式组合成一个三轴陀螺仪来测量飞行器在三维空间内的角速度,只要控制三个轴的角速度就能保持四旋翼飞行器的稳定。随着能够测量三轴角速度的MEMS传感器与MEMS加速度传感器的诞生,利用特定算法结合陀螺仪和加速度传感器测量到的数据,就可以计算出飞行器此时相对于水平面的姿态,从而实现自稳控制。2006年在德国诞生了Mikrokopter开源飞控。2013年,3DR联合苏黎世联邦工业学院(ETH)发布了新一代的开源飞控Pixhawk,其传感器采用了双冗余度方案,即双份陀螺仪,双份加速度计。
目前开源飞控的主要算法都是基于PID的调节器,对于扰动有一定的抑制能力,且对于各种飞行场景具有广泛的适应能力,但这种广泛的适应能力是以牺牲特定场景下性能为代价的。本文针对风力发电机叶片巡检的特殊场景,提出了一种基于前馈的改进型控制算法,能够有效缩短无人机抗风响应时间,提升其打点巡检飞行性能,在此基础上,设计了一种基于无人机运动模型与巡检工作要求的自动路径规划方法。
2 研究背景
2.1 六旋翼无人机运动控制
本文讨论目标为工业领域常用的X型六旋翼无人机,其俯视图结构如图1所示。
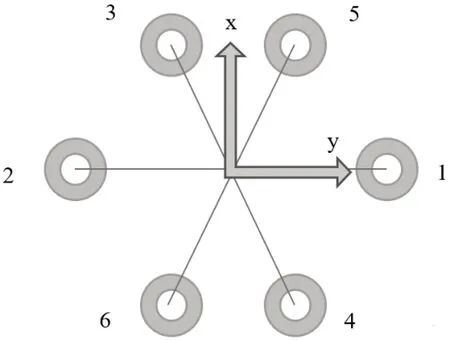
图1 六旋翼无人机俯视示意图
六旋翼无人机可简化视为由六个独立的电机和一个刚体组成。按照Pixhawk开源飞控标准固件定义其电机驱动轴:在常规工况下奇数序号轴顺时针旋转,偶数序号轴逆时针旋转,各桨叶对机架刚体产生的水平转矩方向和旋转方向相反。
取六旋翼前方为x轴正方向,右侧为y轴正方向,上侧为z轴正方向。设六轴各自所产生垂直升力分别为F1、F2、F3、F4、F5、F6,总升力为F,水平扭力和垂直升力呈近似线性关系,线性比例系数为k,则六个轴对机架产生的水平转矩分别为kF1、kF2、kF3、kF4、kF5、kF6,已知为了保持扭力平衡,在无人机静止时,相对的桨叶旋转方向相反。
设无人机绕x轴方向转矩为Mx,y轴方向转矩为My,z轴方向转矩为MZ,无人机臂长为d,则可以得到四个控制自由变量,分别为:
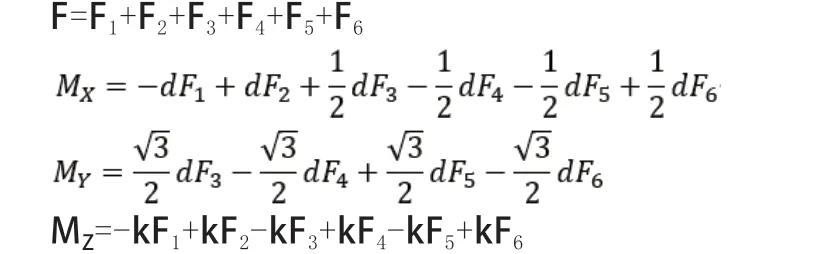
由上可知,六旋翼无人机驱动自由度数量和四旋翼一样为四个,可以直接在上述四个自由度上产生动力,实现三轴角度移动和垂直位移移动,但是在水平移动方向两个自由度上无法直接产生驱动力,因而其模型为欠驱动模型。水平两轴的位移移动需要依靠姿态间接控制实现。
六旋翼无人机的位移量和速度主要依靠GNSS外部位置源提供,加速度和姿态信息则依靠MEMS器件获取。针对无人机定点飞行场景,传统开源飞控算法通过高精度GNSS获取位置源信息,取得位置偏差,求得期望速度,随后和无人机实际空速对比,取得速度差,经过PID后取得需要的加速度,随后再取得加速度差,求得期望角度后取得角度差,通过控制电机出力差,使得无人机达到目标角度,完成控制过程。
2.2 风力发电机叶片无人机自动巡检技术
风力发电机叶片自动巡检无人机需能够根据自身性能参数、飞行特性和不同风力发电机外形轮廓等约束条件,自主计算合理巡检飞行路径,使机载图像采集装置所采集图像能够完整稳定地覆盖风力发电机叶片前、后缘迎风面与背风面受检区域,并合理规划飞行停留拍摄点,对风场的特殊情况(如阵风干扰等)能及时做出反馈,并对偏差进行修正,保证飞行路线与风力发电机本体不产生干涉,从而实现针对常见风力发电机的动态自主导航与循迹自动叶片检查,并给出受检风力发电机各叶片整体与局部检查图像。
风力发电机叶片巡检无人机路线主要由多个巡检图像采集点组成,考虑续航时间、巡检效率等因素,需要无人机具备完成连续打点飞行能力,虽然点与点之间的飞行轨迹较为简单,但巡检过程中存在强风、风向突变等干扰因素。多旋翼无人机采用多螺旋桨升力协同调节的方式对飞行器进行控制,其模型为欠驱动模型,六轴中水平位移的两轴缺乏驱动力,因此对水平方向的位移输入抵抗力相对较弱,在上述干扰因素影响下,虽然依靠多旋翼之间的升力调节很大程度上能保证无人机不倾覆,但存在被吹离相对位置的可能性,进而在巡检过程中偏离预定轨迹、点位甚至发生事故。因此需要针对风力发电机叶片巡检的特殊场景改进控制算法,依据先验条件,提升巡检效率并加强无人机抗扰响应能力。
3 方法设计
3.1 基于前馈的无人机控制改进
前馈控制系统是根据扰动或给定值的变化按补偿原理来工作的控制系统,其特点是当扰动产生后,被控变量还未变化以前,根据扰动作用的大小进行控制,以补偿扰动作用对被控变量的影响。当前馈系统运行良好时,由于其利用了系统本身的特性,而不依赖于反馈后的偏差的变化,因此具有反应迅速和准确的特点,甚至可以将偏差扼杀在萌芽状态从而提高系统的稳定性。
前馈控制系统的设计需要对系统运动特性有整体认识。本文中的风力发电机叶片巡检模型大部分路径均为直线段,无人机整体在运动过程中视为刚体,并能一定程度上视为质点,因此整个路径理想飞行过程可以归纳为匀加速运动、匀速运动与匀减速运动三个过程。
在采用传统PID调节时,由于节点间初始距离较远,在比例调节与死区限制作用下,系统给出的期望速度会接近最大速度。此时无人机刚完成了上个节点拍摄,速度为0,因而在比例调节与死区限制作用下,期望加速度也会达到最大加速度。在无人机速度接近最大速度时,在PID控制器作用下,加速度会逐渐降低,相较匀加速运动花费更长时间达到匀速飞行。同样的,在减速运动过程中,减速的期望加速度比理想情况下更小,相较匀减速运动花费更长时间达到悬停状态,整体巡检效率较低。
鉴于传统PID调节存在的不足之处,在巡检飞行场景下,无人机控制算法改进点在于:根据节点间路径长度,直接预先计算好期望的加速度,在运动过程起始阶段即对无人机直接采用加速度反馈控制。当无人机在一定程度上接近目标点时,再采用基于位置反馈的控制。针对垂直分量运动,利用已知简单运动及无人机垂直方向具有直接驱动力的特性,进行基于加速度的前馈控制,能有效避开接近控制目标时的PID减速效应。由于风力对飞行器的水平作用也表现为产生一横向加速度,在水平方向上也能利用加速度的前馈达到迅速对抗风力的效果。与垂直方向先验数据不同,水平方向风力呈现出相对随机的特性,因此需要对风力对进行预估。根据风场分布理论,可以认为在相对时间和空间内风随机规律不变,因此大量样本情况下风力随机波动变化量服从正态分布。基于这一先验假设,在轨迹垂直和悬停自稳上,采用卡尔曼滤波的方法,获取局部短时间内随机风力对无人机加速度的影响,并且直接采用加速度反馈的方式进行补偿,减少了不必要的调整控制,提高了响应速度。
3.2 基于无人机运动模型与巡检工作要求的路径规划方法设计
3.2.1 巡检路径规划设计背景与指标
多旋翼无人机具有飞行灵活的特点,其转弯半径几乎为零,可以执行近乎苛刻的巡检线路并随时在需要拍摄的位置保持悬停,大部分巡检任务可以直接解算出计划点进行巡检飞行,但其在飞行过程中也具有一定惯量,且多旋翼无人机续航普遍不长,多次启停会浪费电力,因此科学地优化巡检线路有很大意义。此外,考虑到工业应用场景的特殊性,对生产环境和人员的保护也需要考虑在内,因此本文结合实际提出了风力发电机巡检无人机的三个指标:
(1)巡检线路的安全性。安全是一切生产活动需要满足的首要条件。无人机巡检规划路径的安全性包括如下两个方面:第一是无人机自身的安全,无人机需要在飞行过程中保持姿态平稳,不发生姿态异常坠机,不与障碍物碰撞坠机,不因为电池耗尽坠机等;第二是被巡检目标和周围人员的安全,保证无人机在巡检时不因为机身失控或者在外力影响下对被巡检目标和操作人员造成伤害。第二个安全是重中之重,必要时,遇到紧急情况需要牺牲无人机本身来确保第二个安全,尤其是人员的安全。(2)巡检线路的可行性。虽然多旋翼无人机能进行各类常规机动,在三维空间内自由飞行,但是仍然要注意通过性,尤其是窄缝、小洞等场景。即使理论上通过性满足要求,依靠无人机自身位置控制系统控制精度能否留有余量地飞行,都需要进行考虑。(3)巡检线路的高效性。无人机在进行风机叶片巡检时,需要高效地完成巡检任务,总的来说包含了路径本身的高效性,即飞机飞完整个路径完成巡检任务的时间需要最短以及电池的高效性,即避免因为高机动最终造成电池电量下降过快,以至于频繁更换电池影响巡检效率。
风机巡检无人机路径规划主要用于在已知三维空间内找到一条合适的路径,并且代入合适的飞行参数和约束条件,使其能被飞行控制电脑执行,其主要包括如下三个方面:空间、约束和目标。空间是指无人机在风力发电机叶片巡检中所经历的物理空间;约束是指飞行过程中必须满足的条件,包括但不仅限于障碍物和姿态约束;目标是指飞行过程中需要巡检的目标结构,即巡检对象的细分。
风机叶片巡检无人机需要在满足飞行约束条件前提下先通过所有解算出的拍摄点,不出现漏检,尽量降低不必要的重复拍摄率。在规划过程中,飞行控制参数需要合理,以提高无人机飞行的三个指标。无人机自主巡检路径规划需要首先对整个空间进行约束,并且对其进行数字化处理,其次对空间中的各种约束进行确认,进行完这两步已经可以进行最简单的巡检任务,并根据原始轨迹存在的问题对路径和执行过程的控制参数进行进一步优化。最后,结合原始轨迹和优化参数,生成一组最终的巡检策略,并转化为合适的指令。
针对风力发电机叶片巡检路径规划场景,系统需根据已知的风机外形,结合起飞点距离参数等信息,并且添加相对约束后输入解算程序,生成出期望的路径以及路径上必须经过且完成拍摄的节点,在多条相对平直的路径之间根据障碍物约束等条件生成不带必须通过点的过渡路径,并且在每一段路径中都提供一个优化过的飞行控制参数。
3.2.2 巡检路径规划设计原理
首先将整个巡检轨迹分为n段,则有n+1个目标点需要飞行到,pi为该路径第i段的长度值,将起飞点作为飞行任务的基准点。则目标函数如下所示:

其中h为额外的损失函数,实际应用过程中需选择具体的惩罚函数及参数,总体原理是考虑长度之外的其他不利因素,并将其量化。在本文应用中,需要求目标函数f的最小值。
损失函数总共包括三部分,分别是轨迹光滑性、和障碍物的交互关系及与参考线的偏差程度(横向误差、速度误差、朝向角误差等)。
总损失值:

轨迹光滑性:

和障碍物关系:

与参考线偏差程度:

对以上损失函数使用动态规划求解得到初始路径:

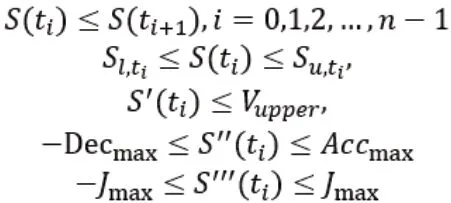
添加约束条件进行二次规划,满足无人机巡检路径安全性、高效性的需求:
4 结语
风力发电机叶片无人机巡检的特定工况要求系统科学规划检查路径,因此必须根据设计指标要求对巡检路径添加约束条件,在满足飞行约束条件前提下再进行效率优化。本文提出了基于损失函数开展飞行路径动态规划求解的方法,并提出了基于先验条件的前馈控制优化改进,在运动前段采用了基于加速度反馈控制方法,同时保留了基于位置的反馈用于确定制动起始点,以避免由于纵向风力扰动造成的速度偏差影响位置的准确度,在位置环利用卡尔曼滤波,针对服从近似正态分布的风力扰动进行前馈补偿的控制,可以减少PID增益。
本文的主要改进思想是利用额外信息进行前馈控制,在不影响稳定性的情况下提高响应速度,即物理模型越准确,额外信息越丰富,取得的效果越好。基于风扰动的控制最好的信息反馈是直接风力反馈,为了计算出风力相对影响,对于离散数据采用一维卡尔曼滤波的方式。通过读取平稳状态下加速度计数据并组成更新数组,对数组进行卡尔曼滤波,同时对随机方差进行调整,以调整数据的平滑程度。如果方差过大会过于平滑会使数据偏离风的预定值,如果方差过小数据波动太大,效果不佳且容易引起抖动。
在本文基础上如果加上风场扰动仿真,构筑包含风力发电机模型与外部环境扰动的Gazebo世界,建立无人机模拟飞行测试环境,可以开展基于加速度反馈的模拟前馈控制测试,即先离线设计路径供无人机循迹,验证巡检路径规划设计优越性,后在线生成路径,验证路径规划方法的运算效率合理可行,以开展后续设备调试工作。
猜你喜欢
防爆电机(2022年1期)2022-02-16
故事作文·高年级(2021年12期)2021-12-21
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
红领巾·探索(2020年2期)2020-05-19
电子制作(2019年9期)2019-05-30
电子制作(2019年7期)2019-04-25
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
