光伏发电双轴逐日跟踪系统设计与实现*
2022-04-19 10:49:48刘伯明张庆海赵正旭
电子技术应用 2022年4期
刘伯明 ,张庆海 ,赵正旭
(1.石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043;2.青岛理工大学 机械与汽车工程学院,山东 青岛 266525)
0 引言
为了获取足够的生存能源,人类对自然界和未知环境的能源探索从未间断过。光伏发电作为一种新能源的利用方式,为解决日益严峻的能源紧缺问题提供了方向[1-2]。目前光伏发电跟踪装置主要分为单轴跟踪与双轴跟踪装置两种[3-5]。相较于单轴跟踪装置,双轴装置的跟踪精度较高,但由于传统的双轴跟踪装置的跟踪策略单一,造成跟踪精度不高、光电转化率低和装置应急性能不足等问题。常见的光电跟踪策略受天气影响大;视日运动轨迹跟踪策略跟踪精度不高,存在阴天情况下耗能大、断电重启时钟时间重置等不足[6-8]。因此,如何优化跟踪控制策略,提高跟踪精度,使太阳能板始终保持最佳吸收太阳能的倾角,增加光电转化效率成为当前的主要研究热点。文献[9]通过对光传感器改进,提出了一种高精度的太阳跟踪控制装置。文献[10]通过优化太阳辐射吸收的最佳倾角数学模型,设计出跟踪效果较高的单轴逐日系统。文献[11]在Lab/CVI 环境下开发了一种基于TCP 传输协议的逐日系统,利用上下位机和TCP/IP协议交互数据,实现了光伏发电和远程监测的逐日系统。文献[12]提出将EtherCAT 总线应用到逐日系统控制中,实现了对逐日装置的群控。文献[13-14]研究了光伏发电最大功率点跟踪算法,对光伏发电效率进一步提高。
本文采用STC12C5A60S2 单片机为控制核心,步进电机为驱动核心,设计了光电跟踪与视日运动轨迹跟踪相结合的自动跟踪控制策略。针对实时太阳高度角和方位角计算,采用DS1302 时钟芯片结合SPA 算法辅助的方法;针对可能出现的装置故障问题,设计了人工按键模式以及基于WiFi 模块的无线远程控制模式。同时采用自动模式和人工模式相结合的混合跟踪控制策略,使得本系统不受天气影响,实现了太阳能板精确逐日功能,为逐日系统在复杂环境下可能出现的故障问题提供了解决办法。此外,该系统对太阳能的普及和有效利用具有研究价值,为人类对非可及环境的能源探索具有重要意义[15]。
1 系统总体结构框图
光伏发电双轴逐日跟踪系统的混合跟踪控制策略采用模块化设计的方法选取软件和硬件,包括电源电路模块、STC12C5A60S2 单片机控制模块、DS1302 时钟模块、SD 卡读写模块、阴晴检测电路模块、控制信号输出电路、按键与液晶显示模块、WiFi 模块、步进电机控制模块等。逐日跟踪系统结构框图如图1 所示。
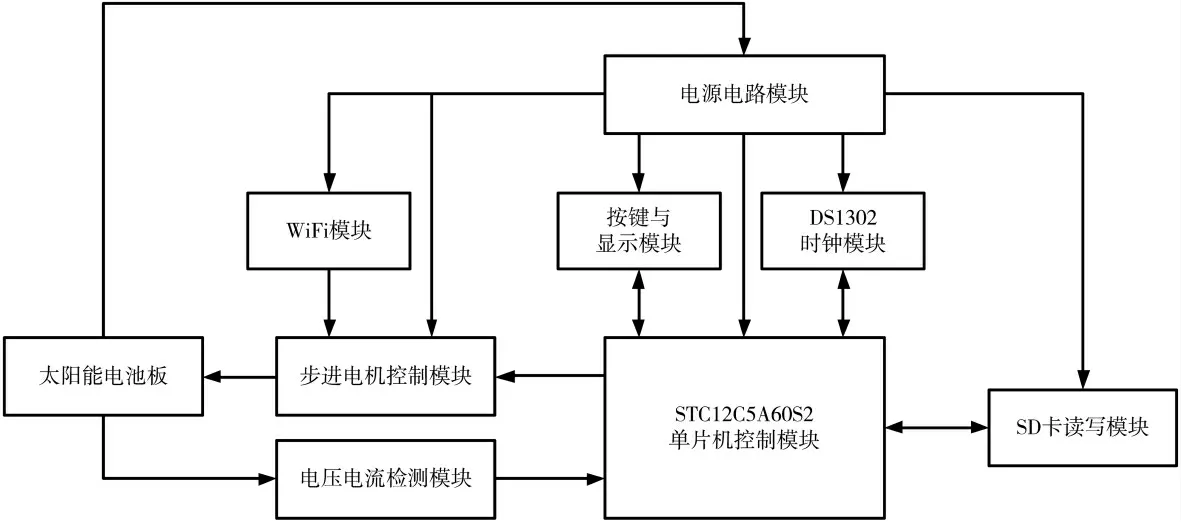
图1 逐日跟踪控制系统结构框图
新一代STC12C5A60S2 单片机负责整个系统的控制和运行,具备高速、低功耗和抗干扰能力强等优点。DS1302模块配合SPA 算法,对当地的太阳高度角进行计算;太阳板吸收光照,通过A/D 转换,将光信号转化为电信号,并传输给单片机控制中心,然后再传输给步进电机模块,进而调节太阳能板,使其能够垂直吸收太阳光;阴晴检测电路判断阴天或者晴天,进而完成光电跟踪模式和视日运动轨迹跟踪模式的运行;按键模块不仅具有自动跟踪模式和人工调节模式切换的功能,能够对紧急故障情况加以人工修正,同时还能修正系统当前所处的时间,进而保障视日运行轨迹跟踪模式的跟踪精度;通过WiFi 模块实现对整个系统的监测和远程控制功能。
1.1 电源电路模块
太阳能板吸收光照转化为电流,电流通过微弱能量收集器储存到蓄电池中。同时,蓄电池作为整个系统运行的能量来源,并通过升压模块,输出稳定的电压电流,步进电机平稳运行。当蓄电池存储的能量不足以维持系统的正常运转时,可通过预留的充电口为蓄电池充电以及为整个系统供能。电源电路模块如图2 所示,J5 为太阳能板接口,J6 为蓄电池接口,U5 为升压模块,U7 为充电模块。LED 灯通过亮度显示太阳能板吸收光照的强度,光照越强,LED 灯越亮。
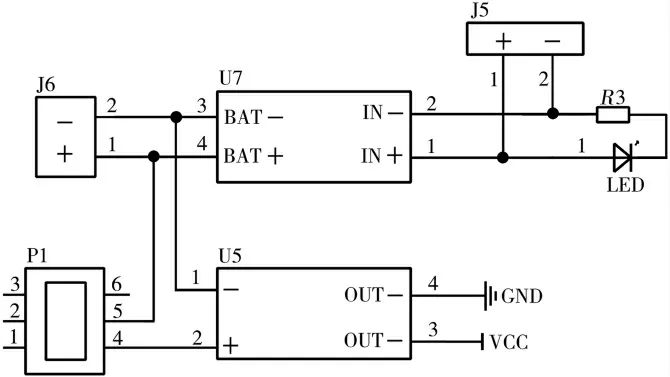
图2 电源电路模块
1.2 WiFi 模块
WiFi 模块选择的是安信可公司生产的ESP8266-12FWIFI 模块。该模块支持STA/AP/STA+A 三种工作模式。本系统采用的是AP 模式,模块自身携带热点,内嵌TCP/IP 协议,使手机直接与模块之间保持通信,实现系统的远程检测和控制功能。该模块中,VCC 用来接3.3 V~5 V 的电源,UTXD 是该模块的串口发送引脚,可接单片机的串口接收引脚URXD,URXD 是模块串口接收引脚,可接单片机的UTXD 引脚。WiFi 模块如图3 所示。
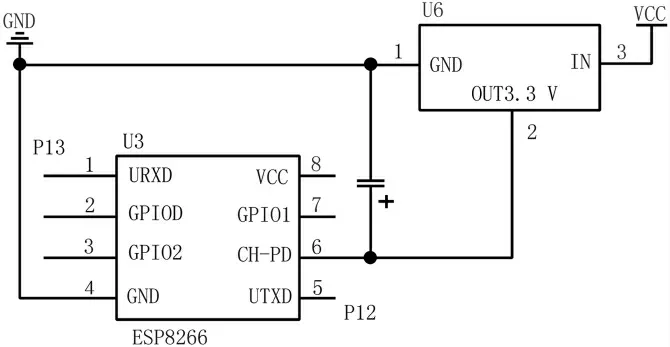
图3 WiFi 模块
2 系统设计原理
2.1 视日运动轨迹跟踪模式
地球在自转的同时也进行公转,造成太阳光照的直射点不断发生变化,使得固定式的太阳能发电板不能保证每时每刻垂直吸收太阳辐射。视日运动轨迹跟踪策略的主要设计理念是通过计算实时太阳高度角、方位角,实现太阳能板垂直吸收太阳光线。
如图4 所示,在地平坐标系中,太阳的高度角是指太阳光线与当地水平面之间的夹角α,其变化范围为0°~90°,当太阳处于正午时分,高度角α 达到最大值;太阳的方位角是指太阳光线在当地水平面的投影与正南方向的夹角β,其变化范围为0°~360°。其中,与高度角α互为余角的γ 是天顶角。
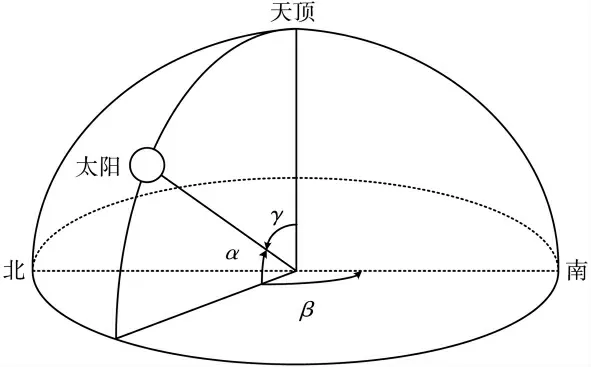
图4 地平坐标系
太阳高度角的计算如式(1)所示:

将式(1)推导,得到高度角的计算公式式(2):

式中:角φ 是当地的纬度值,角θ 为太阳所处赤纬角,角δ 为时角。
太阳方位角的计算如式(3)所示:
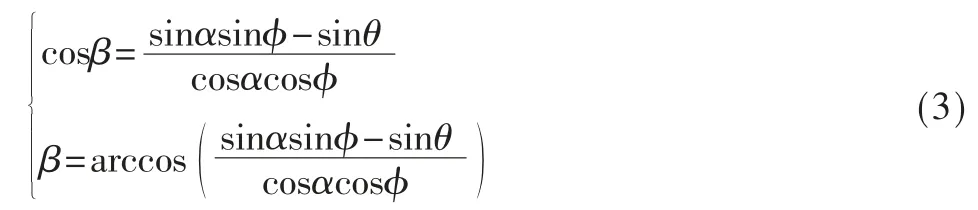
由式(2)和式(3)可知,太阳的高度角和方位角的计算与太阳的赤纬角和时角有关。
视日运动轨迹跟踪策略为了达到较高的跟踪精度,需要知道实时的太阳高度角、方位角以及当前地区的日出日落时间。
由太阳的高度角计算公式式(1),可得出当前地区的日落日出时角公式:

式中,ωh表示日出日落时角,其值为正,表示日出时角;其值为负,表示日落时角。由式(4)可知,已知当地的赤纬角值和纬度值有关,可求出日落日出时角。
视日运动轨迹跟踪策略采用的太阳方位轨迹SPA算法,该算法适用性强、精度高,可计算多年的太阳高度角和方位角[16]。根据当地的经度、纬度以及和海拔等参数计算全天从日出到日落的时间范围内的实时太阳高度角和方位角,并将这些数据存储到SD 卡中。单片机通过查表的方法调用存储的高度角和方位角数据,驱动步进电机完成实时方位控制,使太阳能板达到理论上的位置。
2.2 光电跟踪模式
光电跟踪策略主要与阴晴检测电路模块有关。如图5所示,4 个光敏电阻A、B、C、D 分别接收太阳能板4 个方位的光照强度,通过光敏电阻值的变化情况判断太阳能板是否保持垂直吸收太阳光的最佳状态。单片机采集通过A/D 转换的光敏电阻的电压值,通过数据处理,控制步进电机的运转,使得太阳能板保持在理论上位置。当太阳光垂直照射太阳能板时,4 个方位的光敏电阻两端的电压值几乎相同,太阳能板不发生转动;当上下、左右的光敏电阻两端的电压差值超过设定的阈值,太阳能板向光照强度高的一侧转动,使得上下、左右的电压值小于阈值,从而达到光电跟踪的目的。
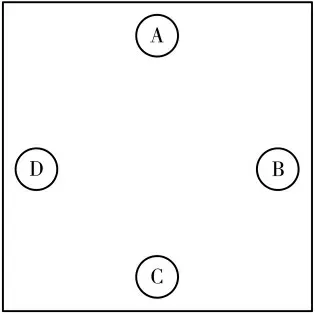
图5 阴晴检测电路模块的光敏电阻排列结构
2.3 远程监测与控制模式
远程监测与控制策略有两方面的目的,一方面是为了面对系统可能出现的突发故障状况,另一方面是为了方便实时收集系统数据,如太阳的实时方位角、高度角、系统的实时电压电流和阴晴检测电路模块中的光敏电阻收集到的实时光照强度。此策略主要依赖于WiFi 模块,该模块内置TCP/IP 传输控制协议,利用该模块的AP工作模式,实现手机和系统相互通信,达到了系统向手机每隔5 s 发送实时数据、收集远程控制系统工作状态的目的。当系统存在突发故障时,手机端可通过命令,将系统的自动模式切换到人工模式,并针对实际状况,对系统做出及时调整。
3 系统主程序设计
首先,系统第一次开机,液晶显示器上显示当前系统的访问地址和端口。手机连接该地址,为系统的远程监测与控制提供保证。然后显示当前太阳能板吸收的环境光照的平均值,系统计算出实时太阳高度角和方位角。若当前系统时间不准确,需要校对DS1302 时钟。图6 为整个系统的程序设计流程图。
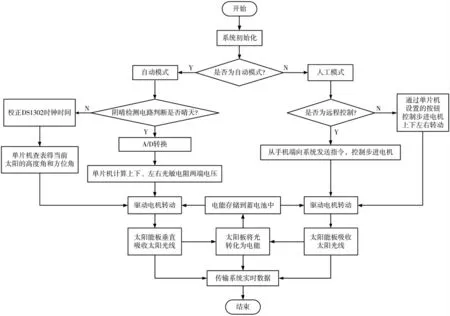
图6 系统程序设计流程图
系统启动,进行初始化,默认的模式为自动跟踪模式。阴晴检测电路模块收集当前光照强度,并与设定的光强记录值比较。若光照强度大于记录值,系统判断为晴天状态,进入光电跟踪模式,单片机将上下、左右光敏电阻的光强信号差值通过A/D 转换成电压信号差值,根据电压差值,使太阳能板转向光照最强的方向。若光照强度小于记录值,系统进入视日运动轨迹跟踪模式,单片机将通过查表查询存储在SD 卡中的太阳高度角和方位角信息,然后驱动步进电机运转,使太阳能板转动到理论位置。单片机可通过模式切换按钮进行自动模式和人工模式的切换,也可通过WiFi 模块从手机终端用命令进行模式的切换。人工模式下,可对系统当前的时间进行校对,从而使太阳能板在相应时间转动到对应的位置;也可通过上下左右按键控制太阳能板的上下左右方向。系统在正常运转下,通过WiFi 模块向手机控制终端发送实时参数。太阳能收集的电能储存到蓄电池中,蓄电池通过升压模块对整个系统提供稳定的电流,达到了太阳能充分利用太阳能的目的。
4 系统实验测试结果
在实验阶段,针对双轴逐日跟踪控制系统进行测试,收集参数。通过SPA 太阳轨迹算法,将青岛某地的经纬度、海拔和温度等参数输入系统,求得太阳的高度角和方位角,并将太阳每个时间段的高度角和方位角存储到SD 卡中。在运行过程中,系统会将计算得到的太阳高度角和方位角显示到系统屏幕并传输到手机上;尤其在视日运行轨迹跟踪模式下,单片机根据系统时间查询对应的太阳高度角和方位角,通过驱动步进电机,控制太阳能板运动。实验收集3 月份某连续5 天的光照强度、太阳高度角和方位角的平均值作为实验数据,每天的时间段选取为7:00~17:00。数据收集结果如表1 所示。
如表1 所示,T 表示时刻,L 表示4 个光敏电阻收集的光照强度的平均值,A 和B 分别表示系统计算的太阳高度角和方位角,A1和B1分别表示根据如梭万年历得到的标准太阳高度角和方位角。将实验数据进行比较,由表1 和图7 看出,连续5 天得到的光照强度平均值处于一种先上升后下降的状态,中午11:00~15:00 时间段内光照强度的变化较为平缓,符合日常一天内太阳辐射值的变化,结果表明该逐日系统具有良好的太阳能收集功能。同时,系统利用SPA 算法得到的太阳高度角和方位角的计算值与查询日梭万年历得到的标准值之间的误差范围为±0.5°,误差小,精度高,表明本装置的太阳轨迹跟踪性能好。
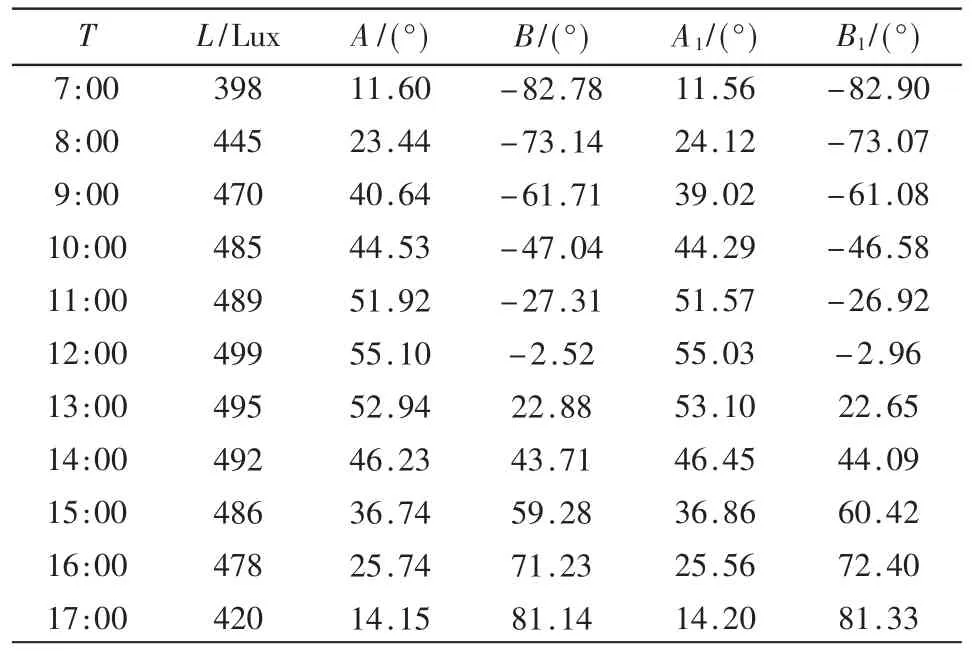
表1 实验数据表
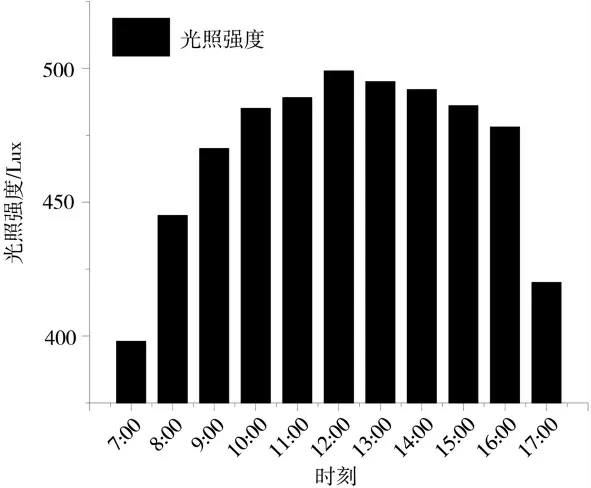
图7 光照强度的平均值变化
5 结论
本文设计的光伏发电双轴逐日跟踪系统采用自动模式与人工模式相结合的混合控制的策略。系统利用SPA 算法计算太阳的实时高度角和方位角,保证系统的跟踪精度,使太阳能板始终保持与太阳光线垂直的最佳倾角状态,提高了光电转化率,充分吸收了太阳能。自动模式下,采取光电跟踪模式与视日运动轨迹跟踪模式相结合的策略,使系统受阴晴天气的影响较小。在人工模式下,独创性地使用WiFi 模块对逐日光伏发电系统的远程监测与控制。实验结果表明,本系统受天气影响小、跟踪准确性高、支持远程监测与远程控制,对我国的光伏发电产业有一定的参考价值。本系统能够吸收转化光能为电能,维持自身正常运转,实现能量自供给。同时,本系统还可以远程监测自身状态与周围环境状态,且面对突发故障问题有一定的解决能力,对人类利用光伏发电技术解决能源问题、远程监测一些危险环境、探索开发利用非可及环境等研究工作具有一定的参考价值。
猜你喜欢
科学大众(2022年23期)2023-01-30 07:03:44
卷宗(2021年2期)2021-03-09 07:57:24
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
空间科学学报(2020年4期)2020-04-22 01:17:04
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
发明与创新(2016年6期)2016-08-21 13:49:36
河南科技(2015年18期)2015-11-25 08:50:14