
基于圆形标定物的矿井下人员的定位方法
2022-04-19 09:19魏家莹薛金虎
科学技术创新 2022年12期
魏家莹 薛金虎
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
煤炭是我国重要战略资源,在我国一次能源消耗中占有重要地位[1]。矿井的精确定位方法是对煤矿智能化、自动化的重要支撑,因此研究煤矿井下精确定位技术与方法具有重要意义[2]。煤矿井下的定位存在着一整个完整系统,该系统由四部分组成:地面中心站、定位分站、天线和标识卡。实现定位必不可少的是测距方法,目前应用于井下的测距方法分为两类,第一类是RSSI(Received Signal Strength Indicator,RSSI)的测距模式,通过人员身上携带的标识卡传送到定位分站,获得相应人员位置信息,定位系统误差在10 米以上,该种测距模式是在Wi-Fi、RFID(RadioFrequencyIdentification,RFID)和ZigBee 三种无线技术下实施;第二类是基于传输到达时间(Time of Arrival,TOA)的测距模式,将时间与电磁波传播速度相乘得到移动节点与相应基站间的距离,而定位精度在0.3 米,对于再提高定位精确难以进一步实现,该种测距模式是在UWB(UltraWideBand,UWB)技术下实施。
煤矿井下工作环境昏暗,照明环境普遍不好,以黑白灰为主要颜色,而圆形安全标定物颜色鲜明的同时在井下也是必不可少。因此,本文提出了一种基于圆形标定物的矿井下人员的定位方法,通过识别相机采集到的图像中的圆形标定物,在已知圆形标定物直径的情况下测量移动人员与圆形标定物的距离,此方法对于携带摄像机的移动设备和人员都能够做到距离的精准判断。
1 椭圆检测方法
图像预处理:
RGB 颜色空间不能做到亮度与色度的完全分离,它是个线性空间,其亮度的变化会引起色度的变化。YUV色彩空间是不同于RGB 色彩空间的另外一种颜色空间,其基本特征是将亮度信号和色度信号分离表示。而本文采用的是YUV 颜色空间中的YCrCb 颜色空间,其中Y表示亮度信号,Cr(U)和Cb(V)是两个彩色分量,表示色度信号,Cr、Cb 分别反映了RGB 输入信号红色和蓝色部分与RGB 信号亮度值之间的差异。RGB 和YCrCb 色彩模型之间的转化公式:

RGB 转换为YCrCb 颜色空间是YCrCb 使用RGB 信息产生一个灰度图像Y,将提取出的R、G、B 颜色变成Cr、Cb 来描述颜色,把三个信号组合回来产生一个新的全彩色图像。
对RGB 图像转换为YCrCb 颜色空间的全彩色图像,根据颜色特征进行阈值处理得到灰度图,灰度图像将圆形标定物与背景区域进行分割,再进行自适应阈值得到图1(b)中的二值图像,二值图像为后续的圆形标定物的检测识别起到关键作用。
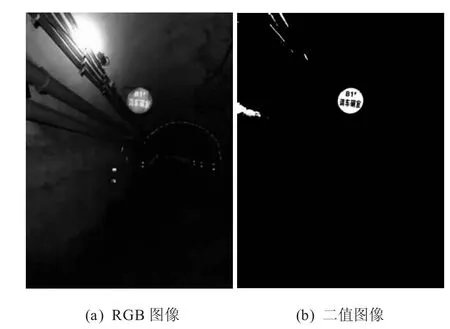
图1 二值图像
2 最小二乘法的椭圆拟合算法
2.1 椭圆的表示方法

2.2 最小二乘法的椭圆拟合算法
最小二乘法[1]即假设样本测量点产生的随机误差为正态分布,由最大似然估计法推出的一个最优估计解的方法[2],该方法的基本约束条件是测量的误差平方和最小。因为误差的大小能够直接反映出拟合精度高低,因此这种方法是常用的拟合方法之一。最小二乘法的主要任务是寻找一组参数,从而使数据点与椭圆之间的距离最小化的一种度量。其中距离的度量常用的是代数距离和几个距离。
将椭圆的一般方程式(2)用两个向量相乘的形式表示,如式(8)所示:

由此解得参数A、B、C、D、E、F 的值,确定椭圆参数完成椭圆检测。
3 单目测距系统原理
3.1 椭圆长轴是圆的直径
在投影中,任何一条与投影平面相垂直的直线,都被称为投影平面的垂线。垂直线可以分为三种:垂直于H平面的线叫做垂线、垂直于V 平面的线叫做正垂线、垂直于W 平面的线叫做侧垂线。投影面按照投影方向分三类:H 面是水平投影,V 面是正立投影,W 面是侧立投影。具体如图2 表示:
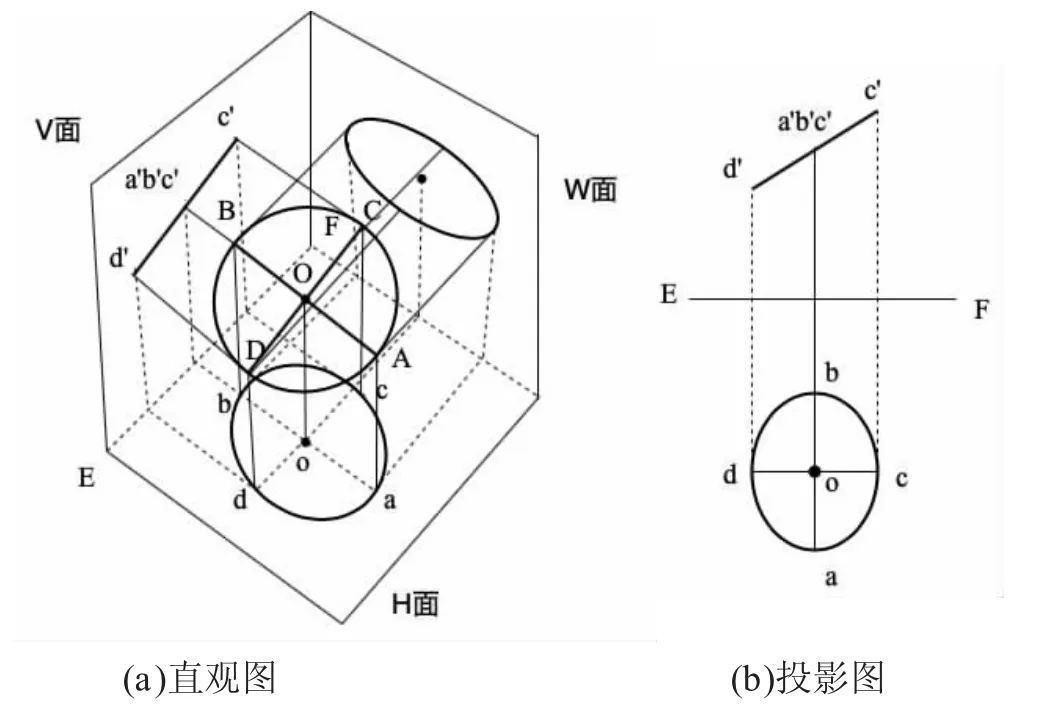
图2 圆的正投影
图2(a)是一个圆分别向三个面进行投影的图,其中V面是正立投影面,H 面是水平投影面,W 面是侧立投影。从图中可以清楚的看出,一个倾斜圆再向不同平面进行投影发生的变化,也能够验证上述的正投影特性。圆具有旋转不变性,圆因由无数条对称轴,无论何种变化角度都会存在与圆的直径相等的一条线段。图中的圆的直径AB 就等于在H 面投影的椭圆的长轴ab,同时,在H面投影上的短轴cd 就是c'd'的投影长度,根据直径投影定理可知,椭圆的长轴ab 与短轴cd 是相互垂直的。在H面上的投影为椭圆的规律,同样适用于W 面上,在W 面上也存在一个椭圆,椭圆的长轴是圆的直径,短轴与其相互垂直。在V 面上的投影,上述也提到过c'd'就是圆的直径,c'd'投影就是椭圆短轴cd。摄像机在拍摄圆形标定物时会产生俯仰角,但是由于圆形在任何角度拍摄都有一条长轴与圆形直径相同,所以摄像机根据检测到的椭圆长轴也就是一条直线进行单目测距能够得到精准定位。
3.2 摄像机标定
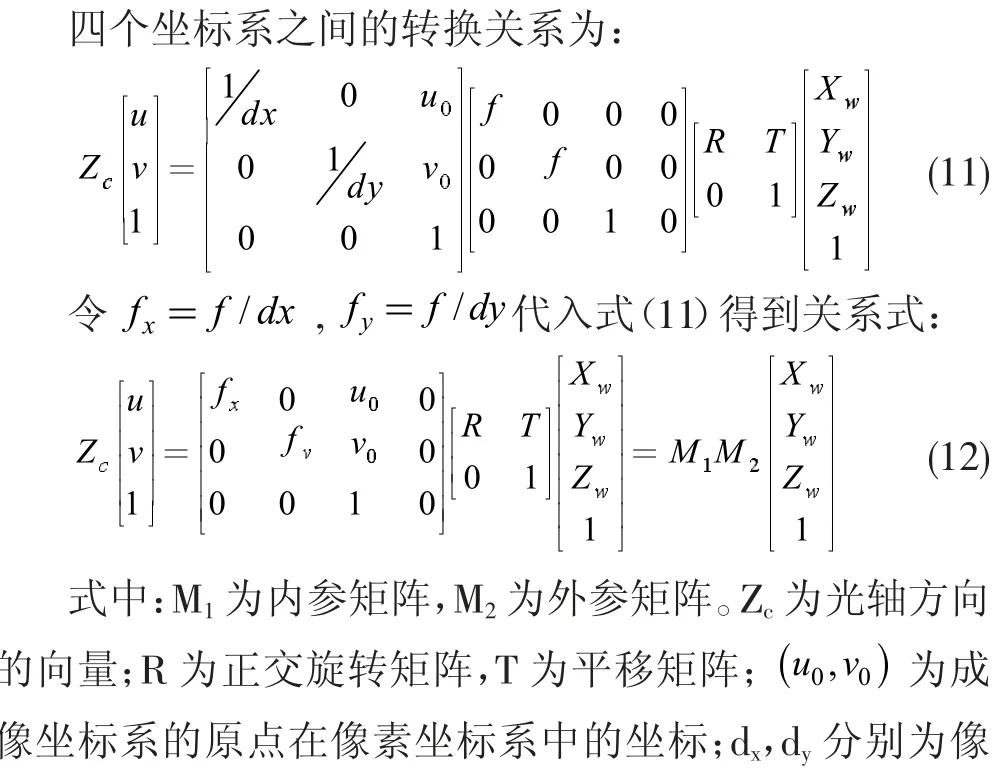
摄像机的针孔模型[3]将现实空间的三维场景投影到CCD 摄像机的二维平面上,这个过程涉及了四个坐标系的转换,包括世界坐标系OwXwYwZw、相机坐标系OcXcYcZc、成像坐标系Oxy 和像素坐标系O0uv。根据小孔成像原理,成像坐标系应该在相机坐标系另一边,为了方便理解投影至同侧,如图3 所示。图中,空间中任一点P 在世界坐标系中的坐标为(Xw,Yw,Zw);空间中P 点映射到像素坐标系中的坐标为(u,v)。
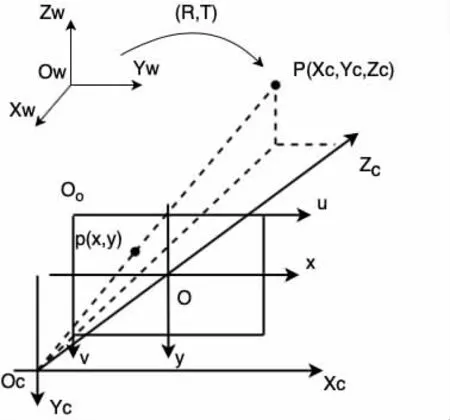
图3 坐标系变换关系

3.3 单目测距方法
单目测距[4]方法依靠于小孔成像模型,在实际应用中,根据圆的投影特性可知椭圆的长轴就等于圆形的直径,将椭圆长轴作为待测目标物,根据小孔成像原理可得到如图4 所示:

图4 单目测距方法
圆形标定物在成像上的直径d 可由相机标定后的内参矩阵M1和公式(13)得出,从而求出当前摄像机与圆形标定物之间的距离L。
4 实验结果与分析
实验中开发工具为PyCharm+OpenCV4,程序语言为python。本文采用的图像均在国家能源集团宁夏煤业有限责任公司双马煤矿井下现场采取。
本文是基于圆形标定物的矿井下人员的定位方法,首先采集到的图像转换到YUV 颜色空间通过阈值分割转换为0 和255 的灰度图像对圆形标定物进行提取,再将预处理后的灰度图进行图像分割和轮廓识别,采用最小二乘椭圆拟合方法将图像中的圆形标定物进行拟合,最后根据相机的小孔成像对椭圆中的长轴进行距离测量。将此方法应用到矿井下进行人员定位,此圆形标定物检测的效果图如图5 所示,并对圆形标定物5m、10m、15m 和20m 的距离进行测距得到表1 的结果。
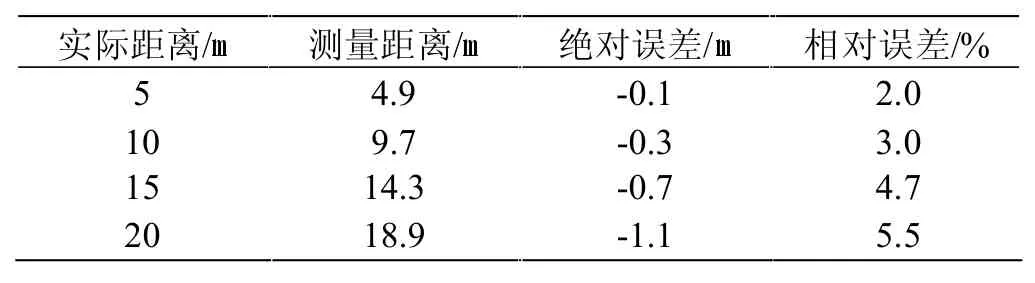
表1 井下人员方向确定
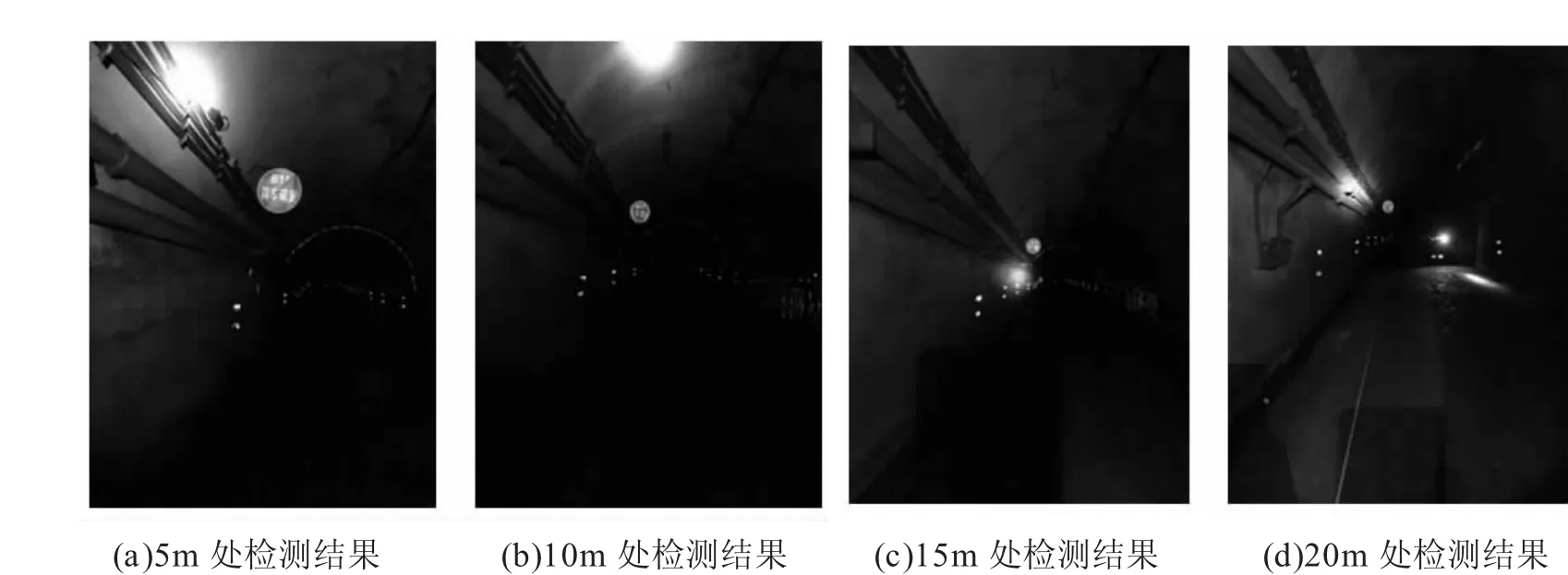
图5 圆形标定物检测结果
5 结论
根据矿井下环境特点和圆形标定物的颜色特征,将采集到的图片转换到YUV 颜色空间,相比较其他颜色空间更适应于本文的场景。接着采用最小二乘法的椭圆拟合算法能准确检测出圆形标定物。根据圆的正投影特性可知圆形的直径就是椭圆的长轴,圆具有旋转不变性,视角的变化不会引起圆的直径的变化。在相机成像后始终有一条椭圆的长轴与圆的直径成比例,所以根据检测到的椭圆长轴也就是一条直线进行单目测距能够得到精准定位。井下应用结果表明,根据已知圆形标定物的直径采用单目测距有较高的准确性,不会受角度和方向的影响,但是在对图像预处理和椭圆检测上都还有所提升。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
广东第二课堂·小学(2017年9期)2017-09-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
小雪花·成长指南(2016年11期)2016-12-07
