
重载VLCC的横向变速性能与靠泊速度控制
2022-04-18 07:00刘艳军柴志文
世界海运 2022年4期
刘艳军 柴志文
一、引言
在船舶发展日益大型化、专业化的今天,20万t级及以上的VLCC被不断投入航运市场。和其他类型商船相比,这类船舶具有满载排水量大,对拖轮力、风压力作用不敏感等特点。在实践中,为了确保顺利地操纵重载VLCC靠泊,驾引人员不仅应选择在平潮期作业,还应采用合理的靠泊方式。为此,贾小堂[1]着重论述了30万t级油轮的进港控速时机;黎造邦[2]借助MATLAB软件全面分析了VLCC的操纵性能,并深入探讨了拖轮的使用方法;李培年[3]定性探讨了控制VLCC的进港速度和靠泊速度的方法。在可查阅的这些文献中,或偏重理论研究,或侧重定性讨论,而依据具体的船舶运动参数探讨控制VLCC靠泊速度的资料却很少。在操纵VLCC靠泊期间,引航员只能凭经验控制VLCC的靠泊速度,这难免会导致其心理压力较重,在指挥拖轮时频繁下口令,时而令拖轮顶推,时而令拖轮吊拖,更有甚者可能会忘记已发出的指令。本文基于重载VLCC的横向变速性能,结合当下作业环境和条件以及拖轮的输出功率提出合理的控速方式,并估算出合理的控速时机,为驾引人员操纵VLCC靠泊提供理论依据。
二、VLCC横向受力概述
操纵VLCC入泊程序复杂,在此过程中VLCC在水平方向上会受风压力、水阻力和拖轮力作用。其中,水阻力随船舶运动状态变化而变化,而拖轮力的大小及作用方向则取决于操船者的意愿。
(一)风压力
由于大多数港口对VLCC靠泊时的风力有明确规定(如天津港规定风力小于7级),且重载VLCC对横向风压的反应并不敏感,因此文中暂不探讨风压对重载VLCC横向靠泊操纵的影响。
(二)水阻力
在对水横移过程中,船体所受水阻力主要由摩擦阻力和压阻力构成。其中,压阻力所占比例远高于摩擦阻力所占的比例,因此可近似认为作用于横向运动船舶的水阻力等于压阻力[4],即

其中:Yw为水线以下船体所受的横向水阻力,N;ρw为海水密度,1 226 kg/m3;L为首尾柱间水线长度,m;d为平均吃水,m;Cwy为横向水动力系数;v为任意时刻船舶横向运动速度,m/s。
对于在特定环境中处于某装载状态的船舶来讲,除横移速度外,上述各参数均为定值;因此可视式(1)中的0.5ρwLdCwy为定值并称之为水阻力系数,用k表示,即

(三)拖轮的推力
在操纵大型船舶靠泊时,为确保安全靠泊并节省时间,操船者通常需要多艘大功率拖轮协助靠泊。据参考文献[5],拖轮可发出的最大推力取决于主机额定输出功率及推进器类型。其中,最常见的ZP型港作拖轮每输出73.5 kW的功率可产生13.24~14.715 kN的推力,且当拖轮在开敞的环境中作业时,其做功效果随风力增大而变差。
三、船舶横向变速运动
据悉,各港口对于VLCC的入泊速度、入泊横距均有明确规定,如天津港规定:重载VLCC的纵向入泊速度应不超过1 kn,横向入泊横距应不小于3倍船宽。横向入泊运动,或经历加速运动、减速运动两个阶段,或经历加速运动、匀速运动、减速运动三个阶段。至于如何控制VLCC的横向运动速度,则主要取决于驾引人员的操纵习惯和拖轮的配置。
(一)VLCC的横向加速运动
考虑到在外力作用下重载VLCC的横向变速性能差,抵达泊位外档后,受双拖轮作用,VLCC的最大横移速度通常不超过40 cm/s,因此可认为作用于船体的压阻力系数为一定值。据牛顿第二定律可建立如下船舶加速横移运动方程[6]:

其中:m+my为船舶虚质量,kg;Tp为拖轮输出的推力,N。
解式(3)微分方程,得
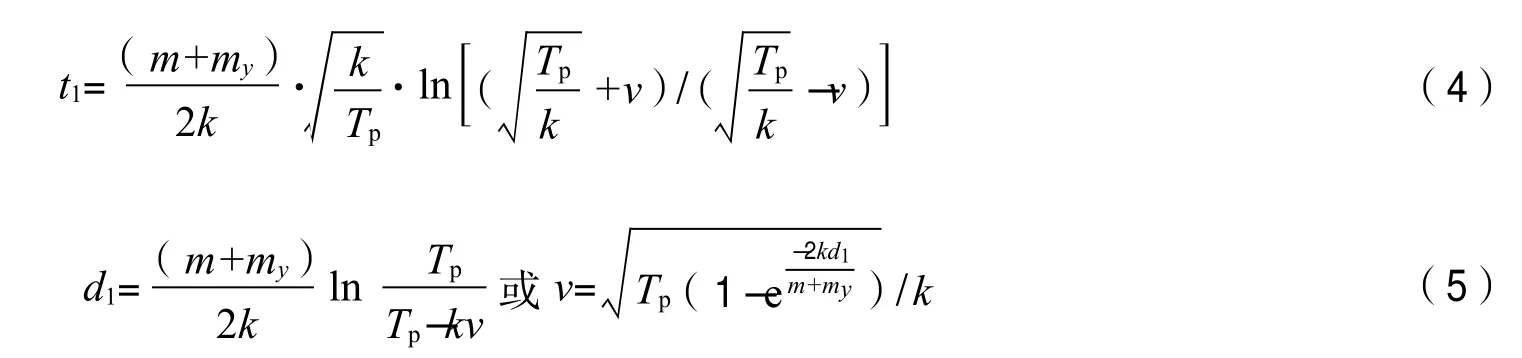
其中:t1为加速横移时间,s;d1为加速横移距离,m。
(二)VLCC的横向匀速运动
当作用于船体的拖轮推力和横向水阻力相等时,船舶将呈匀速横移运动状态。其运动方程为

式(6)可转变为

据此可断定,运动船舶所能达到的最大横移速度取决于拖轮的推力和水阻力系数。
(三)VLCC的横向漂移运动
当船舶横移速度达到某一值时,若令拖轮停止顶推作业,则船体在水平方向上仅受水阻力作用,船舶呈减速运动状态。其减速运动方程为

解此方程,得
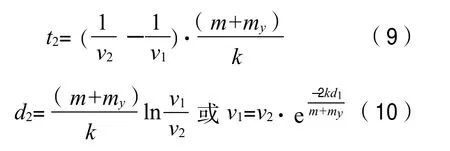
其中:t2为船舶漂移时间,s;d2为船舶漂移距离,m;v1为船舶运动的初速度,m/s;v2为船舶运动的末速度,m/s。
四、VLCC横向入泊速度的控制
从有利于安全操纵方面来讲,VLCC抵泊位外档后,合理控制船舶横移速度是确保VLCC安全靠岸的先决条件,为此需先确定控制横移速度的模式,再确定控速时机。
(一)控速模式的确定
(1)在实践中,为确保VLCC安全靠泊,人们通常取辅助拖轮额定输出功率的80%~90%为其常用功率。在操纵VLCC横向入泊过程中,为确保合理控制横向入泊速度,操船者首先应据拖轮的常用输出功率确定其常用推力Tp′,之后再通过式(7)根据VLCC的横向阻力系数k和拖轮的常用推力Tp′即可算出VLCC能够达到的最大横移速度vmax。
(2)在操纵VLCC横向入泊时,操船者期望的最佳运动模式是在拖轮的常用推力作用下,VLCC的横移速度达到某值之后,拖轮既不予顶推也不予吊拖,VLCC凭自身的惯性以适宜的横移速度靠岸。不妨假定:VLCC的初始横移速度为零;VLCC抵泊位外档时其距码头的横距为d,其值为船舶在加速横移阶段的横移距离d1与其在减速横移阶段的横移距离d2之和,如图1所示;拖轮的常用推力为Tp′;其靠岸速度为船舶运动的末速度d2。继而据上述条件建立下列方程式,并通过解该方程推导出所期望的船舶横移速度v′的表达式。
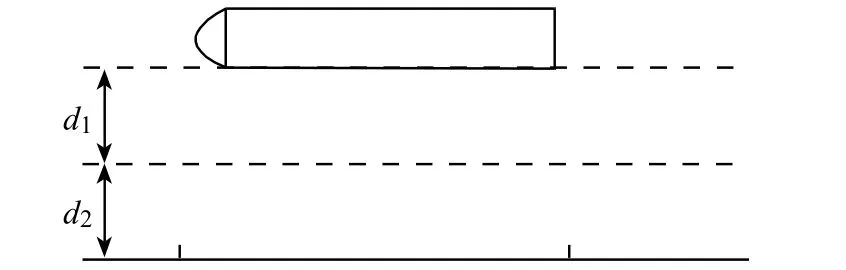
图1 船舶“两阶段式”横向运动距离
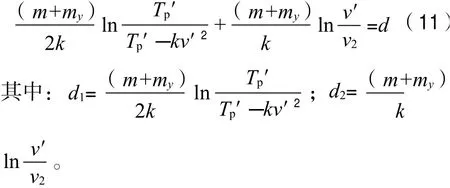
解式(11),得

若v′≤vmax,则表明:承担顶推任务的拖轮所能发出的常用推力Tp′足以使VLCC的横移速度在合理期间达到预期值。据此可把整个横向入泊过程划分为加速运动和减速运动两个阶段,并把这种控速模式称为“两阶段”控速模式。
若v′≥vmax,则表明:① 操船者所企及的横移速度超出了拖轮推力的做功能力。②d的值过大,导致d2的值过大。换言之, VLCC的横移速度接近或达到峰值后,若令拖轮停止顶推,仅靠VLCC自身的惯性,VLCC会以远低于v2的理论速度靠岸。因此VLCC的横移速度达到vmax后仍需令拖轮持续顶推船体并使其横移若干距离,将这种控速模式称为“三阶段”控速模式。
(二)减速时机的确定
若确定以“两阶段”控速模式靠泊,须令承担顶推任务的两拖轮从顶推开始到顶推结束始终以同一推力Tp′顶推船体。VLCC的横移速度达到预期值之际,就是开始操纵其降速的最佳时机;而与之相对应的操作则是令拖轮停止顶推。
若确定以“三阶段式”模式靠泊,需依据事先算出的VLCC所能达到的最高横移速度vmax的值,然后再把所求vmax的值代入式(5)算出VLCC在加速运动阶段的横移距离d1;再据已求得的横移速度vmax的值,算出VLCC在减速阶段的横移距离d2;最后据d1、d2的值算出VLCC在匀速横移阶段的运动距离dm,如图2所示。从理论上讲,VLCC匀速横移了dm之后就是开始操纵其横向入泊速度的时机。
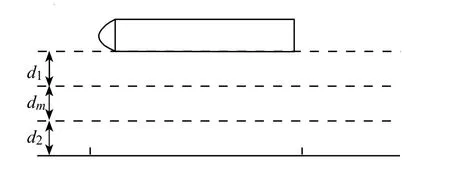
图2 船舶“三阶段式”横向运动距离
五、VLCC横向入泊算例
某VLCC轮M,总长333 m,水线间长323 m,船宽58 m,满载平吃水22.723 m,总载重量307 284 t,满载排水量351 284 t,TPC172.3,方形系数0.812。2021年7月20日该轮抵天津港,抵港时的实际排水量300 972.4 t,处于平吃水状态,吃水19.80 m。
考虑到潮流对靠泊操纵的影响,港方安排该轮于2021年7月21日上午平潮期(10:30时—11:30时,平均潮高约3.6 m)靠泊天津新港S30泊位(栈桥式码头,附近海图水深21.5 m),并安排2艘额定功率均为4 410 kW的拖轮、3艘额定功率均为3 675 kW的港作拖轮协助靠泊。
鉴于多数引航员的靠泊操纵习惯,在本例中特指定2艘额定功率为4 410 kW的港作拖轮承担在横向入泊期间的顶推任务;因此需依据它们的常用输出功率(推力)确定控制横向入泊速度方式并制订相应的靠泊控速预案。
(一)横向运动参数的推算
为了能够确定合理的横向入泊、控速时机,在进港前除了必须据实际情况制订进港计划外,还需事先获取下列船舶横向运动参数:
(1)水阻力系数k的值。依据参考文献[2,5],认定该轮在当时相对水深条件下的横向水动力系数Cwy为3.7,代入式(2)得k=1.2×107N/s2。
(2)横向惯性系数(m+my)/2k的值。为获取船舶横向运动时的附加质量,周昭明[7]根据井上图谱给出下列回归公式。据该公式可计算出船舶在水深充分的水中横向运动时的附加质量为

其中:d为船舶吃水,m;B为船宽,m;Cb为方形系数。
把相关数值带入式(13),可得my=0.736 m。考虑到当船舶在浅水中横向运动时,其附加质量会随水深变化而变化,为此可根据船舶附加质量浅水修正公式[8]计算出在浅水中船舶附加质量的变化倍率为

把相关数值代入式(14),得my′=1.8my。基于以上计算结果,可得(m+my)/2k为29.5 m。
(3)拖轮的额定推力Tp的值。据拖轮资料,用以顶推作业的单拖轮可产生的最大推力为882.9 kN。若把各拖轮额定功率的85%设定为最大常用输出功率,则在此条件下两拖轮发出的推力之和约为1 471.5 kN。
(二)最大横移速度的计算
假定该轮的横向入泊横距为180 m,把拖轮的最大常用推力值、船舶惯性系数、水阻力系数代入式(12)算出M轮的理想横移速度v′为33.34 cm/s,该速度即为预期速度。
由于v′≤vmax,因此采用“两阶段”控速模式和“三阶段”控速模式靠泊皆可。
(三)船舶横向运动距离及时间的计算
1.“两阶段”控速模式
(1)船舶横向加速运动:把所求速度值33 cm/s分别代入式(4)、(5),得到船舶横向加速运动的横移时间t1为293 s、横向加速运动的横移距离d1为63.8 m。
(2)船舶横向减速运动:把速度值33 cm/s分别代入式(9)、(10),得船舶漂移时间t2为989 s、漂移距离d1为110 m。
(3)计算结果表明:尽管所采纳的最大横移速度33 cm/s与理论上的最大横移速度33.34 cm/s仅差0.34 cm/s,该差值却可使加速运动距离减少5.3 m,加速运动时间减少16 s。反过来讲,若拖轮推力的实际做功效果不如拖轮的理论推力效果,则可能使M轮的加速运动距离大幅增大,这对后期的操纵是极为不利的。
2.“三阶段”控速模式
为了对比采用不同靠泊模式可能导致的不同结果,在此以初始靠泊横距为180 m、最大横移速度为25 cm/s为例,计算完成靠泊操作所需时间。
就移动互联网中存在的日益膨胀边界网关协议(BGP)路由表的问题,LISP架构设计了全新的网络结构来分离位置和标识。该架构的中心思想是将之前的IP地址分开终端的身份和位置信息,把IP地址在语义上划分成身份标识(EID)和位置标识(RLOC)两个空间。
将速度值25 cm/s分别代入式(4)、(5)、(9)、(10),可得船舶横向加速运动的横移时间t1为149 s、横移距离d1为20.8 m,船舶横向减速运动的横移时间t2为933 s、横移距离d2为93.8 m。进而可计算得出,船舶横向匀速运动的横移时间tm为262 s、横移距离dm为65.4 m。
综上所述,采用“两阶段”和“三阶段”模式靠泊所需时间分别为1 282 s和1 344 s,采用“两阶段”靠泊模式靠泊,比采用“三阶段”模式靠泊多耗时2 min。
(四)讨论与分析
(1)在船舶加速横移过程中,操船者不可能仅凭发给拖轮的指令预判其实际顶推效果。为此,需视式(5)为以横移距离d1为自变量的函数式,并绘制函数v(d1)的曲线图(如图3所示)和列表(如表1所示),据此可随时判断拖轮发出的推力是否适当。
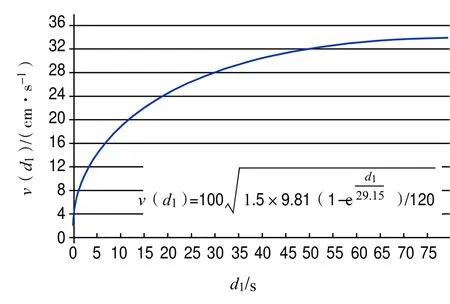
图3 横移速度随横移距离变化的曲线图
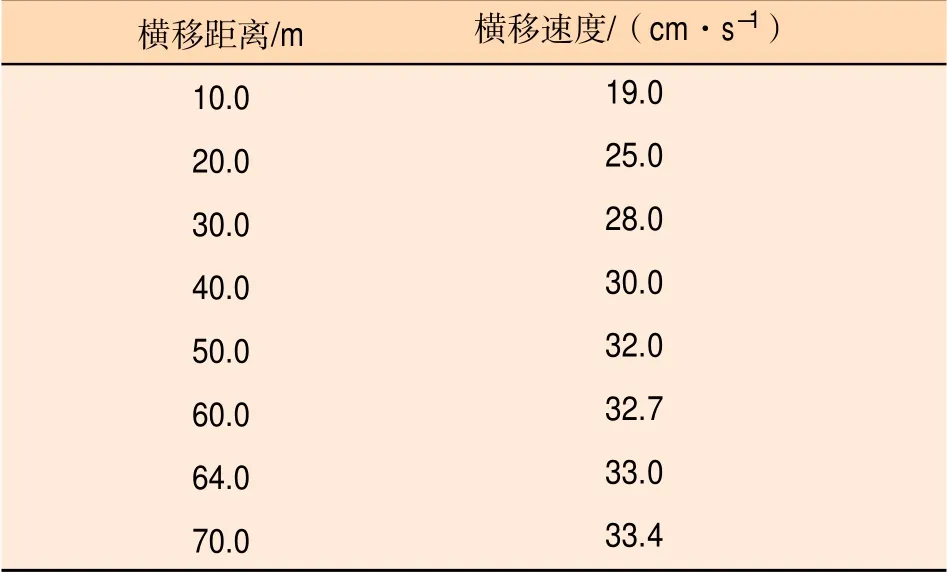
表1 横移速度随横移距离变化表
(2)在船舶减速横移过程中,操船者同样不能直接预判水阻力的降速效果;为此,应视式(10)为以d2为自变量的函数式,并事先绘制出函数v(d2)的曲线图(如图4所示)和列表(如表2所示),据此可随时核实水阻力的实际减速结果是否和表2所列横移速度值相符。
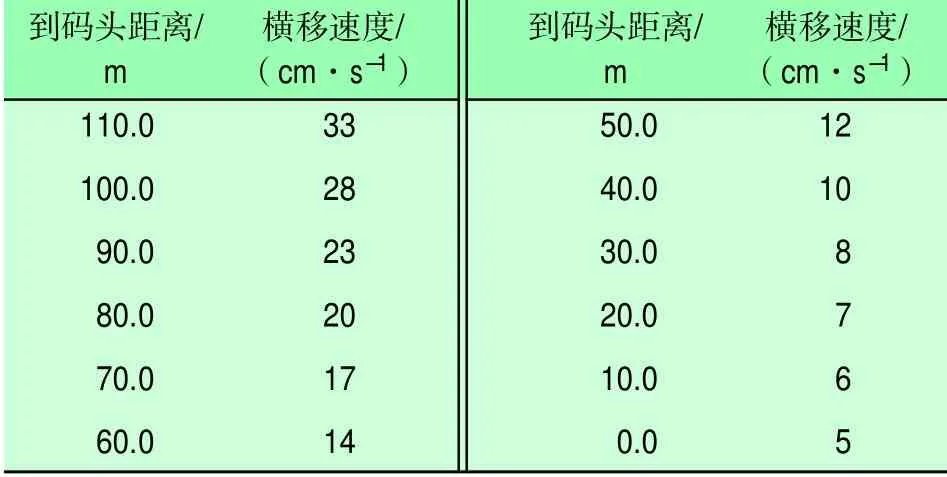
表2 横移速度随船舶距泊位距离变化表
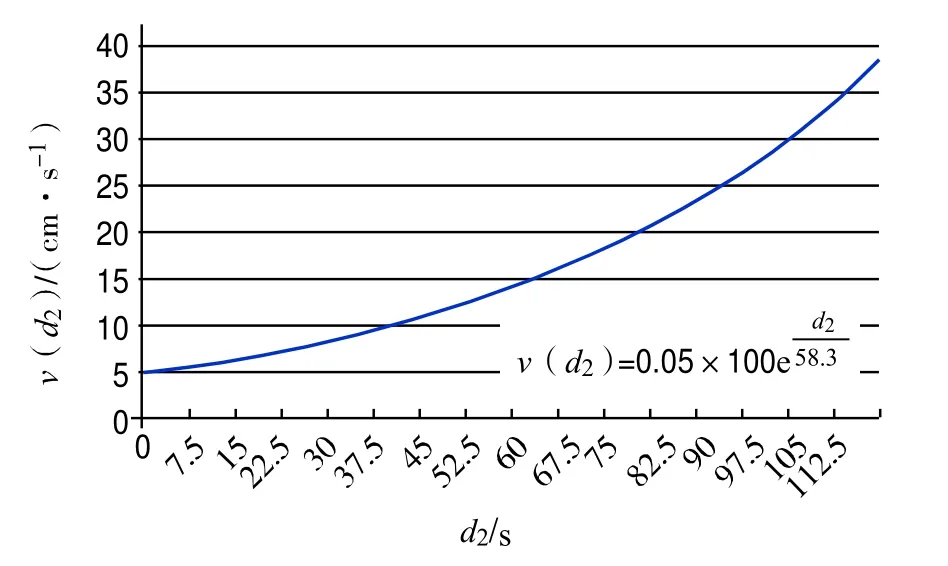
图4 横移速度随船舶到泊位距变化的曲线图
(3)就本算例而言,当M轮到泊位的距离小于10 m,且横移速度接近5 cm/s时,通过式(6)可求得前后两拖轮的最大许用推力之和,即Tp为30 kN。
六、横向入泊控速实例
M轮于2021年7月20日07:30时按计划进港靠S30泊位。当航行至距泊位约1.5 n mile处带妥4艘辅助拖轮。它们的配置顺序从前到后依次为津港轮15、津港轮28、津港轮29、津港轮19和津港轮20(如图5所示)。其中:津港轮15、津港轮18、津港轮19的额定输出功率为3 675 kW;津港轮28、津港轮29的额定输出功率为4 410 kW。当时风力偏北风2级,风压作用较弱,可忽略不计。
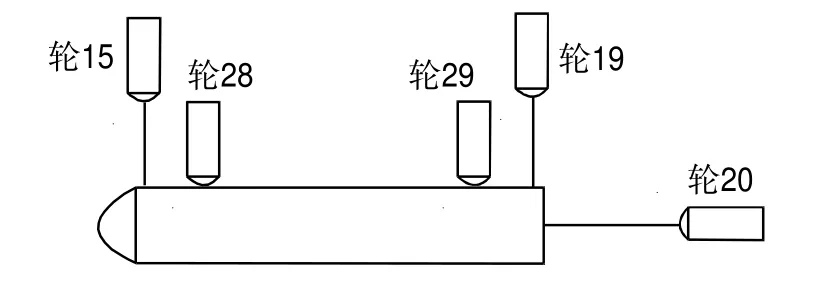
图5 拖轮配置
(一)入泊操纵实录
(1)10:07时,航速3.4kn,船首距泊位0.7 n mile,操纵M轮转向泊位。船舶操纵进入入泊阶段。
(2)10:35时,该轮抵泊位外档,距泊位距离如图6所示,船舶操纵进入入泊阶段。基于当时实际情况,并为验证算例中的船舶运动参数的可靠性,确定采用“两阶段”控速模式靠泊。具体操纵措施及相关船舶运动参数见表3所列。
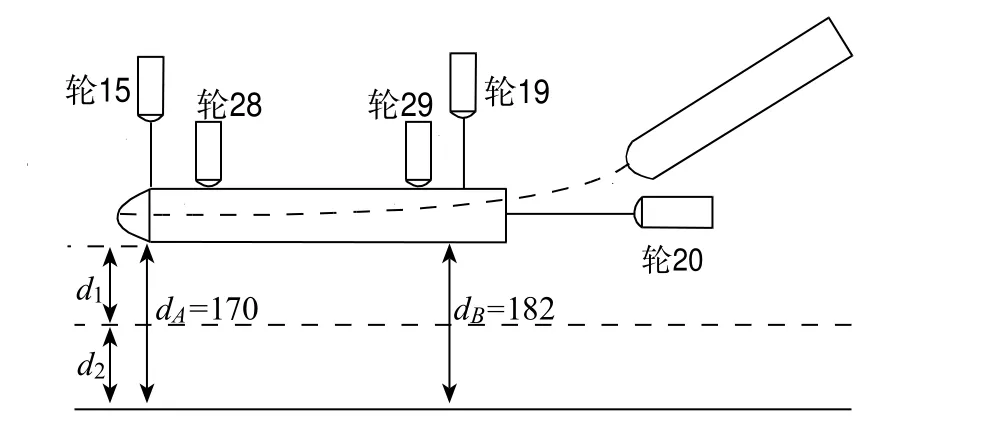
图6 船舶入泊示意图

表3 操纵措施及相关船舶运动参数
(3)10:57时,M轮以4 cm/s的速度平行靠岸。
(二)讨论与分析
表3所列的船舶变速运动数据表明,该表所列数值与理论计算结果相符。因此可断定:文中所引用的各运动参数是可靠的;在相同或相近的外界条件下操船者可直接引用这些参数。
(1)在加速拢泊的初期,M轮产生了向后运动的速度,究其原因极有可能是因津港轮28、津港轮29的顶推船舶角度出现了偏差,好在通过转舵、进车既抑制了船舶后退速度又调整了船首。
(2)10:49时,发现船首有向左偏转的趋势,随即令津港轮15慢速拖、津港轮29慢速顶,使船舶的偏转趋势得到抑制,究其原因很可能是因水下底土面不平所致。
(3)由于靠泊仪所显示的横移速度仅能精确到厘米级,且拖轮输出功率存在些许误差,和靠泊仪所显示的真实速度、横距相比,计算出的预期横移速度和横距必然存在误差。但在靠泊过程中引航员可依据靠泊控速预案及时予以纠正。
七、结束语
在电子信息技术高度发达的今天,在操纵超大型船舶横向入泊时,粗放型的入泊操纵方式已不符合时代要求。本文涉及的原理不难,但相关的数学运算却较为复杂,不过借助电脑软件、手机APP等相关电子计算工具可快速完成过去靠手工难以解决的数学运算。因此,只要在靠泊前做好相应的准备工作,就可在操纵VLCC横向入泊过程中避免盲目指挥拖轮。
天津港同仁的多次靠泊实践证明:文中给出的控制VLCC横向入泊速度的方法既可靠又实用;既适用于VLCC又适用于其他超大型船舶。希望兄弟港口的同仁们在引航实践中对本方法的可靠性予以佐证。
猜你喜欢
水上消防(2022年1期)2022-06-16
广西糖业(2022年1期)2022-03-31
昆明医科大学学报(2021年12期)2021-12-30
中国船检(2021年8期)2021-11-21
船舶(2021年4期)2021-09-07
珠江水运(2021年5期)2021-04-05
英语文摘(2020年10期)2020-11-26
作文周刊·小学一年级版(2020年8期)2020-05-11
船舶标准化工程师(2019年4期)2019-07-24
珠江水运(2019年9期)2019-06-02
