机器人柔性焊接生产线的应用
2022-04-18 18:18覃永
时代汽车 2022年7期
关键词:机器人
覃永

摘 要:本文以汽车下车体总成自动化焊接生产为例,阐述了车身焊接自動化线的形成原因,以及柔性焊接生产线的应用场合。从柔性焊接生产线的设计内容出发,分别从柔性焊接夹具的技术要求、抓手设计以及机器人布置规则等方面论述。通过对下车体柔性焊接生产线的分析,对其设计要点进行研究,为自动化生产中工业机器人的使用奠定基础。
关键词:柔性生产线 焊接工装 机器人
1 引言
随着工业技术的进步,汽车制造的自动化已不可逆转,尤其是在焊接方面,由于焊接质量可靠、工作效率高、重复率高的特点得到各大制造厂商的认可,应用已经非常普遍[1]。邱玮杰[2]设计了汽车零部件点焊机器人工作站。张英华[3]以汽车地板前侧板构件总成为例,介绍了焊接机器人工作站的设计。传统的大量重复生产的生产线已经制约着汽车厂的更新速度,在这种情况下,规划出一条既能提供焊接效率,同时又能加速迭代,保证焊接质量的机器人作业路线就显得十分重要[4]。李占营[5]阐述了柔性焊装线的特点和设计规划需要考虑的因素,详细介绍了目前集中不同的车身总拼夹具形式、特点及应用。罗琪等[6]阐述了原有的柔性线生产过程中节约维护成本,提高生产效率。汽车车身焊接车间,是整车框架完成的地点,其零部件多为超大、长、重的物件,这些物件的搬运与转移工作是一项很繁重的任务,工业机器人取代人工进行物料的上件及转移,不仅降低了工人的劳动强度,也提高了生产线的效率[7]。
2 车身柔性焊接工装设计原因
随着工业4.0的到来,车企的生产线发生变化:手工焊装线向机器人自动生产线的转变进而要求柔性生产。
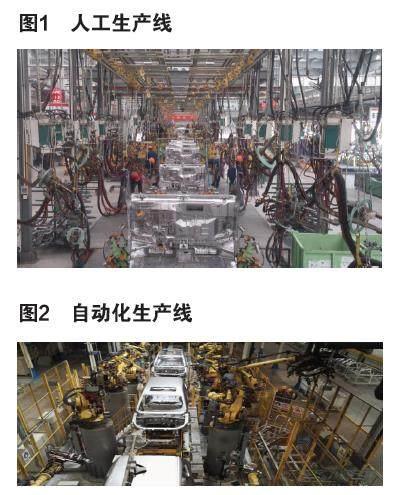
传统的手工焊装线分布在低节拍的生产线和分拼工位上。主要由钢结构、水电气、焊机、焊钳、夹具、涂胶系统、螺柱焊系统、工位间转运及辅助踏台等组成。每个工位都需要定位单元,数量庞大。并且随着车型增多,夹具数量巨大,需要有存放场地及仓库,如图1所示。自动化线采用机器人,伺服焊钳,定位工装,输送设备,自动控制等设备组成。具有节拍高,焊接效率高等优点,如图2所示为自动化焊接车间。
3 柔性焊接生产线应用场合
实现不同车型的混流生产,减少设备投资,减少生产准备阶段,车身精度改善。概念性设备:采用具有高可靠性的自动化生产线,关键工位要用有品质保证的设备。考虑应付车型变更和车型追加设备的柔性化。考虑对重的部件和复杂工作的传输方法。对易引起偏差的部件考虑设备的稳定性。通过采用新技术,设计制造标准化设备维护性,品质改善,部件精度和生产率等问题。
该工位需要实现功能:(1)三个零件的物料从供应商送达现场后,放置在对中台上,机器人从对中台取件,放置到工位定位焊接拼台。三个零件为车架在主要组成部件,分别为前车体(也称前车架)、前地板(也称中部地板)、后部下车体(也称后车架);(2)拼台定位夹具对三个零件进行定位、夹紧;(3)机器人携带焊钳对零件搭接处进行焊接;(4)机器人携带抓手对焊接后的车架总成进行搬运转移;(5)该工位要可柔性,实现多个车型的车架定位、焊接、搬运,同平台车型不需要切换定位夹具、焊钳、抓手等;(6)预留抓件、夹具切换功能,后续新车型因差异过大导致夹具、抓手不能兼容时,可进行快速切换。
4 柔性焊接工装设计内容
柔性车身合拼焊接工位包含内容:焊装夹具,输送装置(抓手),焊接设备(伺服焊钳),修模装置,控制设备,机器人,切换装置,水电气供给系统,物流料箱、料架等等。
4.1 柔性夹具结构
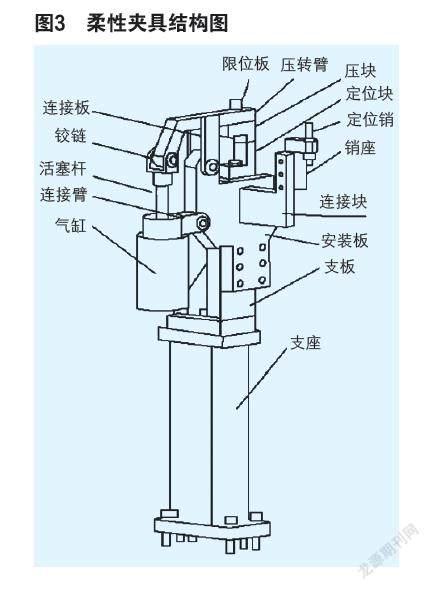
柔性夹具结构大致与简易夹具结构相同,主要结构包括定位夹紧机构(如连接块,销座,定位销,压块)、支座、限位块等功能件。如图3所示为柔性夹具的结构示意图。
柔性夹具不仅要满足普通夹具的保证车身精度,减少装夹误差的要求,还能满足不同零件的重复装夹,达到减少项目投资成本,缩短项目周期的目的。
4.2 焊接机器人工位布置
根据经验机器人工位布置遵循以下几条:(1)根据机器人6关节活动范围及可达性,若机器人相互工作区域没有共同区域,即工作期间不到达共同的空间,则以机器人活动可达范围区分,将另外的机器人布置在可达范围以外;(2)若机器人之间有交互区域,机器人相互间的距离不得小于1500mm,此时需要对机器人设置干涉区;(3)若机器人工位与人工工位相邻,则必须有安全隔离护栏,以提高安全性,机器人与围栏的距离在机器人工作轨迹最接近围栏的地方不得小于200mm。(4)机器人的站位不宜过高,根据车身厂房评估,不能与厂房上方设备干涉,且要人员可达便于维护;(5)控制柜要就近布置在机器人附近的围栏外,便于机器人调试方便及减少机器人的通讯线长度。
4.3 定位销设计
高精度薄板零件焊接前,需要对其进行装夹定位,定位销是其中一种定位元件。定位销一般位于钣金件定位孔内,要求耐磨。它属于高精度零件,通常使用定位销尺寸有8\10\13\16\18\20\25。设计定位时,根据零件定位孔的大小,从推荐的标准里选取即可。下车体安装定位销的位置,通常选择如图4定位点区域。车身合拼工位是主要定位拼台,是完成整个车架定位的关键基础,其中主定位孔位于前后大梁上,零件(前地板)定位选取在零件与前后车架搭接处。
5 结语
汽车自动化焊装生产线是在当今汽车智能制造发展的强劲需求下形成的,而高节拍柔性化生产线是当前自动化生产线的主流趋势。高节拍柔性化生产线最显著的优势就是适应多种汽车车型、灵活度高、占地面积集中,能大大提高焊装生产线工艺流程的节拍速度,降低人力资本的投入,更适应了当今汽车市场车型更新换代迅速的客观需求。本文通过对汽车焊接柔性生产线的设计,从柔性焊接生产线的设计内容出发,分别从柔性焊接夹具的技术要求、抓手设计以及机器人布置规则等方面论述。通过对下车体柔性焊接生产线的分析,对其设计要点进行研究,为自动化生产中工业机器人的使用奠定基础。
6 展望
多品种、小批量是现阶段汽车样车开发的显著特点。本文所开发的夹具结构,具备成本低、设计制造周期短、轻量化等特点,很好地实现了样车车身的低成本、柔性化制造。但是柔性工作站的夹具目前只是同平台的车型进行生产,不同平台功能做了预留,能否很好的实现多平台的车型柔性生产,还有待验证。
参考文献:
[1]单利华,刘晓晨,王玉光.汽车行业数字化车间技术探索[J].汽车实用技术,2017(10):117-119.
[2]漆俊杰.轿车白车身焊装生产线的工艺规划与布局设计[J].南方农机,2018,49(12):53.
[3]张英华.焊接机器人工作站的设计[J].电焊机,2014,44(08):104-106. [4]秦承华,杨黄锐,张颖,熊玮.汽车中通道焊接柔性生产线设计与应用[J].汽车零部件,2021(07):85-88.
[5] 李占营,年雪山,魏迎旺.论轿车车身柔性焊装线的规划及应用[J].汽车工艺与材料,2010(09):17-20.
[6]罗琪,李龙,张强.汽车总焊柔性生产线系统优化的研究[J].工程建设与设计,2018(S1):132-135.
[7]叶坤.商用车国六后处理器机器人焊接生产线特点研究[J].电焊机,2020,50(03):41-48+141-142.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07