基于车载自组网的交通事故风险预防方法
2022-04-18 18:13刁含楼吴岚华禹凯
交通科技与管理 2022年6期
关键词:随机森林
刁含楼 吴岚 华禹凯

摘要 车载自组网技术是当今交通运输领域最前沿的技术之一,路段网联车与路侧单元通过无线组网可实现丰富信息的高效传输共享。该技术一方面可与动态车道控制结合,加强控制策略的稳定性与灵活性,另一方面掌握全局交通信息的组网网联车本身即具有更优的驾驶特性,从而改善交通流的整体状态。引入车载自组网技术,基于随机森林算法构建解耦式交通—通信仿真框架,评价低比例网联车的二次事故预防效果,结果显示只需较低比例(5%~20%)的网联车可改善事故对交通环境的影响。
关键词 车载自组网;事故风险预防;解耦式交通—通信仿真;随机森林
中图分类号 V279 文献标识码 A 文章编号 2096-8949(2022)06-0020-03
引言
车载自组网(Vehicular Ad-hoc Network, VANET)是当前交通运输领域最前沿的技术之一,通过车车(Vehicle-to-Vehicle, V2V)、车路(Vehicle-to-Infrastructure, V2I)通信可实现一定范围内网联车的信息共享和协同运动,被认为在交通安全[1]、出行效率[2]和环境可持续[3]等领域具有巨大的应用潜力。
网联车在组网环境下,可获取关于周围交通环境的更准确的交通信息,表现出更稳定的行为,在网联车、人工驾驶车混合的交通环境中,前者达到一定的占用率,依然有助于形成更稳定的交通流[4]。Yang 等[5]即研究了网联车的存在对二次事故风险防控的效果,研究人员认为在事故发生后,组网环境下的网联车可以提前预知事故信息,表现出更为谨慎保守的动力学特征,研究者修改了组网网联车的动力学参数,经过仿真验证,在仅依靠车车通信的情况下,网联车比例相对较高(超过15%),显著降低二次事故风险。
1 交通—通信建模
1.1 實时交通—V2I通信辨识
车载自组网中V2I通信指网联车与路侧RSU设备之间的通信。因为RSU设备静止且一般通信范围大于网联车,V2I通信往往更稳定可靠。控制中心可借由 RSU设备对其覆盖范围内的网联车发布指令。RSU与网联车通信半径一般不等,故V2I通信又有上行、下行之分,仅考虑单向V2I通信,指令单向地由 RSU传向网联车。
1.2 考虑瓶颈影响的实时交通—V2V通信预测模型
实时交通—V2V通信预测模型旨在基于实时宏微观交通信息预测任意网联车的车车连通状态。对任意网联车,若能接收至少3辆网联车所发消息,认为该车处于连通状态。除去异常值后在统计的274 706组样本中有164 879组正样本,指该网联车于该时刻处于连通状态,另有109 827组负样本。与V2I通信不同,V2V通信过程中所有节点空间位置均可变,基于遍历算法实时预测连通状态存在较大的时间开销,故基于二分类机器学习算法建立网联车连通与宏微观交通状态的联系,实现V2V通信预测。
1.3 候选自变量设置与事故影响辨识
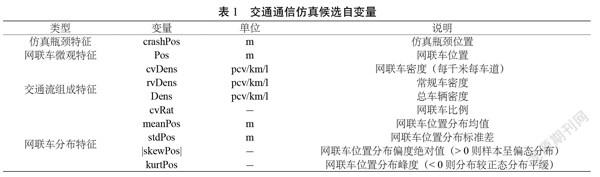
研究基于随机森林模型预测网联车的通信状态。模型所设候选自变量如表 1所示,可分为仿真瓶颈特征、网联车微观特征、交通流组成特征和网联车分布特征4类,共含10项变量。其中交通流组成特征是对车载自组网整体效果影响最大,也是约束最大的因素。网联车分布特征进一步明确了对应时刻车载自组网节点的空间分布。
根据统计学定义,理论上网联车的分布偏度 skewPos 与分布峰度 kurtPos 均可作为区分瓶颈影响的指标。为选取最优指标,对两者的联合分布进行可视化,同时区分两类瓶颈仿真所对应的情况。可以明显看到样本点大体呈下凹分布——随着位置偏度绝对值的增加位置峰度也随之上升,与瓶颈影响下网联车分布的畸变情况完全一致。可以看出受分析尺度影响不同事故位置会影响网联车的分布偏度——当瓶颈于K1+950断面时分布偏度偏向于负值;而瓶颈于 K1+300 断面时分布偏度偏向于正值。这意味着必然存在一断面,当事故恰好发生于此时即使网联车分布发生畸变,其分布偏度仍接近于0,分布偏度不适用于事故影响划分。综上所述,选取网联车分布峰度kurtPos为区分指标,设置峰度阈值,对网联车分布是否受事故影响进行区分,当样本峰度高于该阈值时,认为网联车分布受事故影响明显。考虑到均匀分布的峰度为−1.2,定性地以−0.6为阈值进行划分,将样本划分为正常状况(Normal)和瓶颈明显影响(Fluctuate)两类,分别包含76 661和198 045组样本。
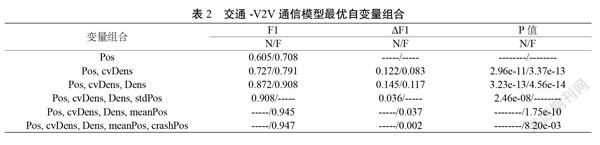
经显著性检验得到的两模型最优自变量组合存在一定差异(表 2)。两模型的公共自变量为网联车位置 Pos、网联车密度 cvDens 和总密度 Dens,包含网联车微观特征和交通流组成特征两类特征。除此之外正常状况时模型尚须考虑网联车位置标准差 stdPos,即模型更关注网联车分布的离散情况。而受瓶颈明显影响时因为网联车聚集程度基本确定,故模型在各项分布特征中更关心网联车的聚集位置,即分布均值 meanPos。另外模型还须瓶颈位置 crashPos 以辅助预测。
2 车载自组网环境下的事故风险分析
以 SUMO 自带的跟驰、换道模型模拟常规车和网联车的微观驾驶行为,当网联车处于连通状态时对部分微观交通模型参数进行调整,当网联车连接断开时则退回常规车交通模型参数。
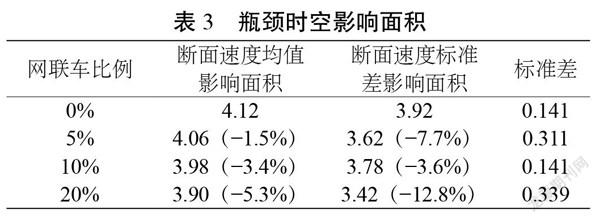
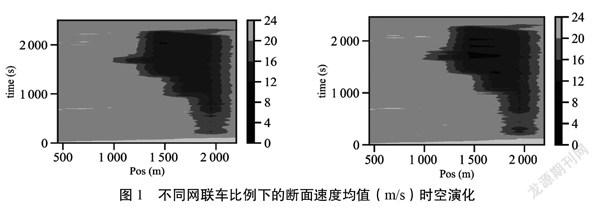
以路段各断面速度均值和标准差的时空演化表示瓶颈的时空影响(图 1、图 2)。同样地由大律法对时空演化数据进行分割,定量计算事故时空影响面积(表 3)。图 2为不同网联车占用率下事故的发生对断面速度均值的时空影响,其中深色的慢速行驶区域即为事故的影响范围。可以看到在无网联车时,事故的空间影响一度达到事故断面上游 700 m处,网联车的引入对该影响范围的改善效果似乎并不十分明显。表 3由定量计算的影响面积证实了网联车的效果——约5%的网联车比例可使事故瓶颈面积缩小约 1.5%,且该效果随网联车比例增加而进一步增强,说明网联车的存在有助于在一定程度上改善瓶颈对断面速度的影响。图 1为不同网联车占用率下事故的发生对断面速度标准差的时空影响,亮色区域表示该断面各车道速度差异较大,同样可表征瓶颈的影响范围。图 1与图 2具有较高的一致性,再结合表 3可看出网联车的引入同样有助于改善瓶颈发生后断面各车道的速度变异性,改善效果存在波动但整体幅度明显优于其对速度均值的改善效果,5% 的网联车可使影响面积缩小约 7.7%。断面横向速度差越低有助于减小换道频率,既提升了安全性也缓解了换道造成的通行能力衰减。综上所述,混合交通环境中的网联车可从各方面不同程度地改善交通状态。
3 结论
根据现有的耦合式交通—通信仿真框架进行车载自组网仿真获取仿真数据,再进行数据挖掘,分别讨论交通—V2I 通信、交通—V2V 通信两类情况。预测 V2V 通信时,因不同交通状态特别是事故的不同影响下网联车的分布将发生改变,从而影响信息传播,引入表征网联车分布的各项变量并区分事故影响,构建考虑事故影响的实时交通—V2V 通信预测模型,并对模型的预测性能和各项指标的影响进行定量定性分析。最后基于模型构建解耦式交通—通信仿真框架,基于解耦式仿真分析网联车的存在对二次事故预防与通行能力提升的效果,结果显示只需较低比例(5%~20%)的网联车自各方面改善事故对交通环境的影响。
参考文献
[1]BAI F, KRISHNAN H. Reliability analysis of DSRC wireless communication for vehicle safety applications; proceedings of the 2006 IEEE intelligent transportation systems conference, F, 2006 [C]. IEEE.
[2]BAUZA R, GOZALVEZ J, SANCHEZ-SORIANO J, et al. Road Traffic Congestion Detection through Cooperative Vehicle-to-Vehicle Communications; proceedings of the 35th Annual IEEE Conference on Local Computer Network (LCN), Denver, CO, F 2010 Oct 10-14, 2010 [C]. 2010.
[3]TIELERT T, KILLAT M, HARTENSTEIN H, et al. The impact of traffic-light-to-vehicle communication on fuel consumption and emissions; proceedings of the 2010 Internet of Things (IOT), F, 2010 [C]. IEEE.
[4]CHEN A, KHORASHADI B, CHUAH C-N, et al. Smoothing vehicular traffic flow using vehicular-based ad hoc networking & computing grid (VGrid); proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, F, 2006 [C]. IEEE.
[5]YANG H, WANG Z, XIE K. Impact of connected vehicles on mitigating secondary crash risk [J]. International journal of transportation science and technology, 2017(3): 196-207.
收稿日期:2022-02-18
作者簡介:刁含楼(1989—),男,硕士研究生,研究方向:智能交通、智慧公路。
猜你喜欢
中国中药杂志(2017年7期)2017-05-26
湖北农业科学(2017年7期)2017-05-13
电脑知识与技术(2017年5期)2017-04-08
时代金融(2017年6期)2017-03-25
安徽农学通报(2017年1期)2017-02-15
软件(2016年7期)2017-02-07
南水北调与水利科技(2016年6期)2017-01-06
电脑知识与技术(2016年23期)2016-11-02
软件(2016年2期)2016-04-08
现代电子技术(2015年15期)2015-08-14