基于学科交叉的全方位移动机器人教学平台开发
2022-04-15 05:16毋少峰
科教导刊·电子版 2022年7期
王 班 毋少峰
(杭州电子科技大学机械工程学院 浙江·杭州 310018)
0 引言
随着时代的发展与社会的进步,机器人在人类生产和生活中得到了越来越广泛地应用,机器人已经渗透到人类社会的各个角落。机器人技术涉及机械、电气、控制、材料、力学、计算机等多个学科,是当今机电工程学科极为活跃的研究领域之一,代表了机电一体化的最高成就[1]。移动机器人是机器人技术中一个重要发展方向,已广泛用于资源勘察、教学医疗、家庭服务、商业清洗、自动化工厂的物流系统、危险品处理和清洗等多种场合。相对于目前已有应用的其他移动系统形式而言,轮式移动系统具有运动效率高、承载能力强、结构形式丰富、驱动控制简单、运动方式灵活、行进速度快等优点,是目前应用较广泛的移动机构。
机器人技术是构建机器人装置所涉及的机械、电气、控制及编程技术,具体包括机器人机械结构设计、机器人机构学、机器人运动学、机器人动力学、机器人运动规划、机器人力控制、机器人运动控制、机器人视觉及机器人编程等方面。通过机器人相关课程的学习,使学生初步了解机器人技术所涉及的基本理论、基础知识,为学生毕业后从事机器人及自动化机械的应用、机器人系统及自动化机械装置的开发和创新设计工作,提供机器人技术的机构学、运动学及控制等方面技术初步认识基础。然而,正是由于机器人涉及学科众多,给高等院校的相关机器人技术教学带来了一定的挑战。以往机器人相关课程主要采取传统讲授的教学形式,学生一方面很难在短时间内掌握大量机器人基本理论知识,另一方面也使得学生感觉课程乏味,继而连基本的机器人的基本知识及发展趋势都难以掌握[2]。
针对此种情况,笔者以让学生掌握机器人相关理论与技术,同时培养学生的自主学习能力与动手能力为目标,秉承“兼顾理论与实践”的理念,提出了一种融合多学科的全方位移动智能机器人教学平台。
1 平台设计与开发
所提出的全向移动机器人教学平台采用全向轮移动结构,可在平面上实现前后、左右和自转三个自由度的运动,非常适合空间狭小、对机动性要求高的场合,例如叉车、工程车、星球探测车、清洗机器人、游戏机器人和服务机器人等[3]。本文采用课题组提出的交替式正交全向轮(如图1所示)[4],采用大小鼓形辊子交替装配的形式,单排辊子即可实现全向轮圆周的完整性,在一定程度上解决了全向轮普遍存在的敲地现象[5]。

图1:交替式正交全向轮
1.1 结构布局
根据全向轮的运动原理,目前比较常用的全向移动机器人可采用三支点与四支点结构布局,分别如图2(a)、2(b)所示。三支点结构布局结构简单,使用三套驱动电机即可实现机器人的全方位移动,但机器人整体稳定性较差,适合于轻载场合。四支点结构布局具有较好的对称性与稳定性,使用四套独立驱动电机实现机器人全方位移动,适合于重载场合。为了实现本教学平台控制的多样性,本机器人平台采用如图2(b)所示的四支点结构布局形式。
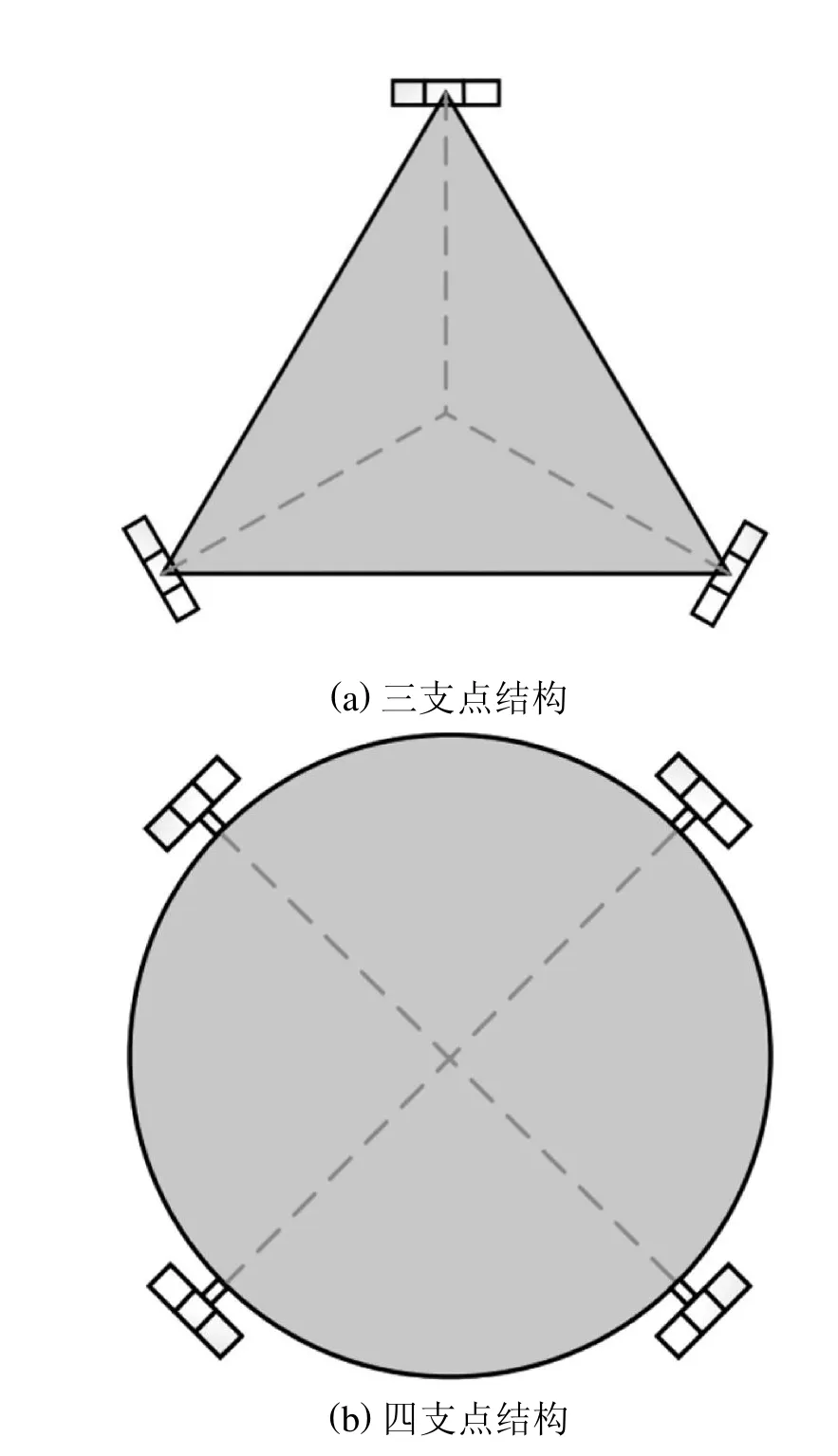
图2:全方位移动机器人结构布局
1.2 电控系统
本机器人教学平台采用工控主板作为主控制器运行ROS系统,扩展CAN通讯卡与电机伺服驱动器组成CAN-open网络。工控主板通过CANopen网络直接发指令给电机伺服驱动器并读取电机的运动状态等信息,通讯速度可达到1M/s。机器视觉摄像头采用数字式相机,相机的数据通过以太网总线传输到嵌入式处理器。嵌入式处理器同时处理相机的数据,完成坐标标定、数据融合等工作,最终数据融合到工控主板完成地图信息的建模工作。电池充放电检测系统及触摸显示屏等作为外部信号输入与工控主板直接通讯。机器人整体控制框图如图3所示。
1.3 环境识别
机器人环境识别是机器人实现高精度定位与导航的前提条件。选择图像的匹配特征,找出特征与特征之间的本质属性,建立稳定的匹配算法。将特征匹配与区域匹配相结合,形成一种基于极限约束的立体匹配方法,具体过程如图3所示。理想条件下,移动机器人的目标是在没有人的干预且无需对环境作任何规定和改变的条件下,能够按照预先给定的任务指令,根据已知的地图信息做出全局的路径规划,并在行进过程中,不断感知周围环境信息,引导移动机器人自身绕开障碍物,安全行驶到达指定目标,并执行要求的动作和操作。同时,移动机器人也要将自身的状态信息反馈给控制台,方便控制台对车体进行监控。

图3:移动机器人驱动控制框图
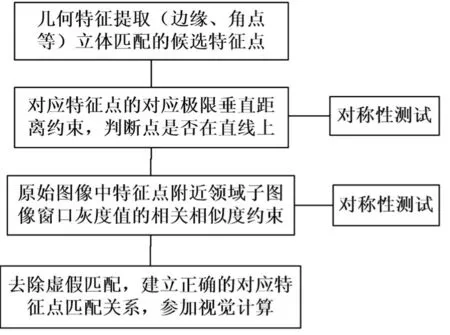
图4:立体匹配方法示意图
1.4 样机研制
根据前述全方位移动机器人四支点结构布局,结合电控系统及机器人视觉导航系统,搭配弹簧阻尼减振系统,研制了如图5所示的全方位移动机器人教学平台样机。测试表明,此平台最大载重可达100kg,通过四个驱动电机的配合可实现沿任意方向的移动,自主导航精度可满足日常教学演示。
2 总结
本文提出并研制了一种全方位移动教学机器人平台。从机械专业角度分析,本平台具有如下创新点:

图5:移动机器人平台
(1)首次将全向移动机构应用于教学机器人。相较于传统的轮式移动机器人,基于全向轮的移动机器人动力学方程更加复杂,控制量更多。学生基于教学平台进行机器人动力学建模与控制系统设计可快速、高效地提高学生工程实践能力。
(2)全方位移动智能机器人教学平台融合多个学科。在教学过程中,应用此教学平台可开展机器人运动学、动力学、智能控制、结构设计、电气开发及传感器技术等方面的实践教学活动,可全面提高学生综合知识能力。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年7期)2021-08-30
现代信息科技(2021年21期)2021-05-07
家庭影院技术(2020年8期)2020-09-11
福建质量管理(2019年18期)2019-10-14
制造技术与机床(2017年3期)2017-06-23
快乐语文(2016年7期)2016-11-07
中学课程辅导·教学研究(2016年35期)2016-04-10
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28