基于S7-1200 PLC的小型水稻催芽控制系统设计*
2022-04-15 09:11:18周育辉
南方农机 2022年8期
周育辉 , 孙 滨
(1.江西生物科技职业学院,江西 南昌 330200;2.泰山职业技术学院,山东 泰安 271000)
0 引言
水稻是我国的第一大粮食作物,其种植方式影响着水稻的产量。随着农业现代化的发展,水稻的插秧大都实现了机械化,而插秧机械化中关键的一项是有标准一致的秧苗,标准化育秧的前提是水稻出芽的良好性。水稻的催芽就是人工采取一定的手段,保证水稻处于合适的温度、水分和空气环境中,人为营造出适合水稻发芽的良好条件,从而使水稻能够尽早发芽,整齐出芽。通过自动控制发芽流程,可以避免自然发芽时外界不良气候的影响,从而提高出苗效率,增强生产能力,达到防止烂种、烂芽,提高秧苗整齐度和成秧率,节省种子的目的[1-2]。
传统的水稻催芽方法依赖于人的经验和人为操作,造成在催芽过程中有很多不可控因素,同时生产流程不规范,温度控制不精确,使水稻发芽出现烧芽、烂种等问题,容易浪费大量的人力物力,不能满足现代化农业的需要。因此,设计智能化的水稻催芽器对于实现水稻的现代化、规模化、机械化种植具有重要的意义。本研究利用温度传感器、S7-1200可编程控制器、触摸屏实现了水稻催芽环境控制系统的软硬件设计,利用模糊PID控制算法实现水稻催芽流程温度的精确控制要求,实现了催芽控制系统的优化控制,使水稻催芽有一个合适的环境,提高了自动化程度。
1 系统结构组成
水稻催芽基本流程包括热水-浸种热备、水稻浸种、水稻破胸作业、催芽过程、催芽结束排水等。在现代水稻催芽过程中,要求整个催芽过程实现精准、智能化控制,以提高水稻的出芽率,降低人工劳动强度,因此对水稻催芽过程的时间、整齐性、自动化程度有更高的要求。为实现上述目标,采用智能控制及传感器技术在整个流程中对种箱的水位、水温、喷淋增氧等进行智能化控制,并针对异常情况进行报警。系统的总体结构如图1所示。
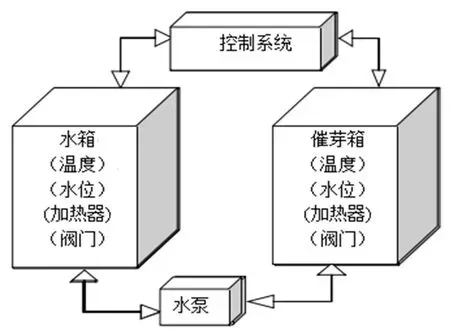
图1 系统组成框图
2 水稻催芽控制系统设计硬件方案
根据小型水稻催芽系统的智能控制要求,要求系统能够长时间可靠运行,并能实现对催芽流程的自动控制。经过实际现场分析,采用了以PLC为控制核心的控制系统。根据实际控制需要在种箱内设置4个温度传感器、2个水位传感器、1个水箱加热器,外部通过水泵、电动阀门实现水循环、进水、排水。其硬件电路组成框图如图2所示。

图2 系统硬件组成框图
2.1 控制核心PLC
水稻催芽控制系统的硬件选型根据现场实际控制需要,对所需要的IO点数、模拟量输入输出数量及精度、安装方式等进行合理选择。根据分析,整个系统需要开关量输入信号10个、开关量输出信号6个以及采集温度信号的模拟量输入信号4个,属于小型控制系统[3-5]。因此,从实用性、可扩展性等方面考虑,PLC选用西门子的S7-1200 1214C。该控制器是一种中低端紧凑型控制器,可以与HMI及其他自动化组件进行通信,方便于整个控制系统功能的实施。
2.2 模拟量输入模块
系统要求采集水温,以满足系统需要及后续扩展使用,采用SM1231的8路热电阻测量模块,带有8路模拟量输入,其分辨率可以达到0.1 ℃。
2.3 温度传感器和温度变送器
根据现场实际需要,水温采集所用的温度传感器为Pt100 温度传感器,其为正温度系数热敏电阻传感器,由于其测温精度高、稳定性好且测温范围广等特点,是-200 ℃~650 ℃中低温检测常用的检测器,并且无需放大器即可直接连接到温度变送器模块上。
温度变送器采用了西门子的SITRANS TH100温度智能变送器。温度传感器Pt100经过智能变送器,直接输出与温度成正比的4 mA ~20 mA的直流电流。
2.4 液位变送器
采用SIEMENS液位变送器7ML5221-1DB11。其为一种超声波变送器,采用2线回路供电,用于对明渠、储存容器和简单过程容器中的液体进行液位、体积和流量监测,易于安装和启动,具有信噪比极高、自动虚假回波抑制等优点,适合本系统需要。
2.5 人机界面——触摸屏
为实现人机交互,直观显示测量结果及调整控制参数,选取西门子的TP700精致型触摸屏。这样整体利用博途软件进行硬件组态及程序设计。其整体硬件组态如图3所示。
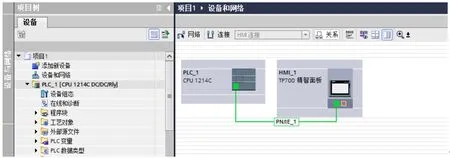
图3 硬件组态图
3 水稻催芽控制系统软件设计
由于水稻催芽过程中对水温的控制要求很高,并且种箱一般体积比较大,对其的控制具有大滞后、时变性的特点,并且没有合适的数学模型,采用常规的PID控制,其比例、积分、微分三个参数不方便确定,调试困难,不易达到很好的控制效果[6-8]。利用模糊控制可以很好地解决上述问题,抑制温度等多种环境参数产生的耦合效应,提高控制效果。本研究将模糊控制与常规PID控制相结合,结合两者的优点,实现系统控制要求。整个系统软件设计主要核心是两个部分:1)PLC控制程序设计;2)模糊PID控制器设计。
3.1 PLC控制程序设计
PLC主要根据控制参数要求进行整个催芽流程的闭环控制。其工作流程如图4所示。
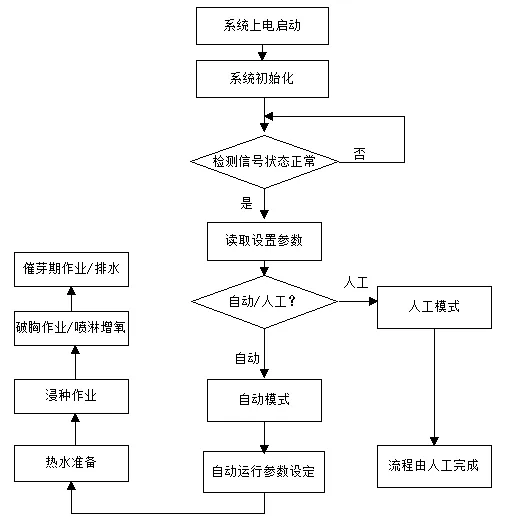
图4 PLC整体控制流程图
3.2 模糊PID控制器设计
在浸种、破胸、催芽工作流程中,为满足催芽需要,对水温的要求比较高。如果水温不符合催芽过程中的阶段要求,会出现出芽时间慢、烧芽等问题。并且水稻催芽种箱体积比较大,催芽时间长,不同阶段所需水温多变,因此控制系统采用常规PID控制很难达到好的控制效果。为达到催芽过程中水温的控制精度要求,综合应用PID控制和模糊控制,其基本结构如图5所示。
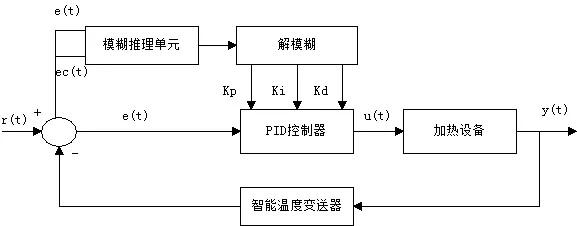
图5 模糊PID控制结构图
在本设计中系统根据温度传感器采集到的温度数据和设定的温度进行计算,得到温度误差e(t)和误差变化率ec(t)。将温度误差和误差变化率以及被控制输出量进行模糊化,形成模糊子集{NB、NM、NS、NO、PS、PM、PB},其量化论域为{-3,-2,-1,0,1,2,3}。
根据实际工艺的要求及以往的工作经验,得出ΔKp、ΔKi、ΔKd模糊控制规则表。由于篇幅所限,本文仅列出ΔKp的模糊控制规则表,如表1所示。
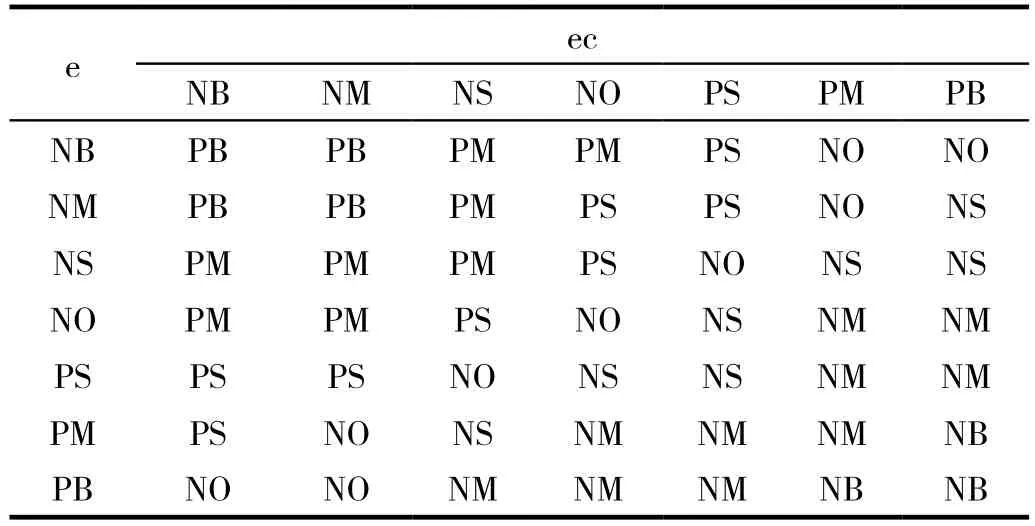
表1 ΔKp的模糊控制规则表
根据模糊控制器得到的数值是不确定的模糊值,为实现系统的精确控制,通过最大隶属度原则将不确定的值变成确定数值。这样可以得到模糊控制器输出的比例、积分、微分三个参数的实时增量ΔKp、ΔKi和ΔKd。通过计算公式可以获得PID控制器所需要的比例、积分、微分参数,计算公式为:
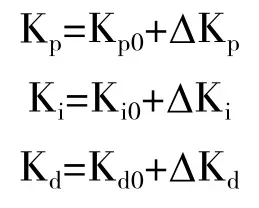
其中,Kp0、Ki0、Kd0为PID控制器的初始参数。
利用计算得到PID控制的三个参数,进行PID运算,得到对加热器的控制信号,控制加热器的加热温度在催芽流程要求的波动范围内。系统控制结构图如图6所示。
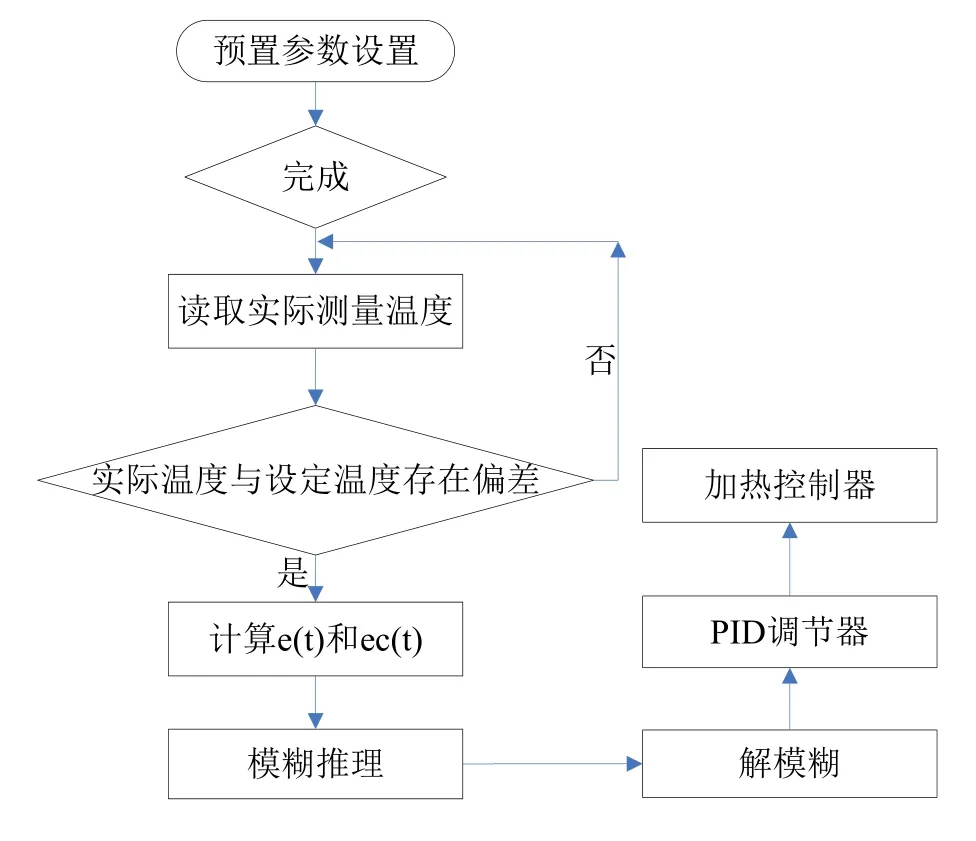
图6 模糊PID温度控制流程图
4 触摸屏界面设计
为方便现场用户设置系统参数,需要有良好的人机交互界面。系统选择了触摸屏。触摸屏利用博途软件进行画面设计。通过触摸屏和PLC进行通信,传递采集的现场数据,并将用户设置参数下发至PLC。触摸屏画面主要包括参数设置、现场数据采集、人工操作、故障报警等。系统界面如图7所示。可以通过上面的按钮在各个界面上进行切换,实现了良好的人机交互。
5 系统运行调试
利用博途完成了软件设计后,将 系统安装在一个小型育种室内进行试验,验证系统设计的可行性和可靠性。该控制系统由操作人员根据催芽要求,在触摸屏上设定好温度、时间等相关参数。进行自动及手动运行,并观察系统运行过程是否与实际设定动作一致,报警信号是否及时发出。经过实际测试,整个系统能够按照设计流程可靠运行,满足用户需要。
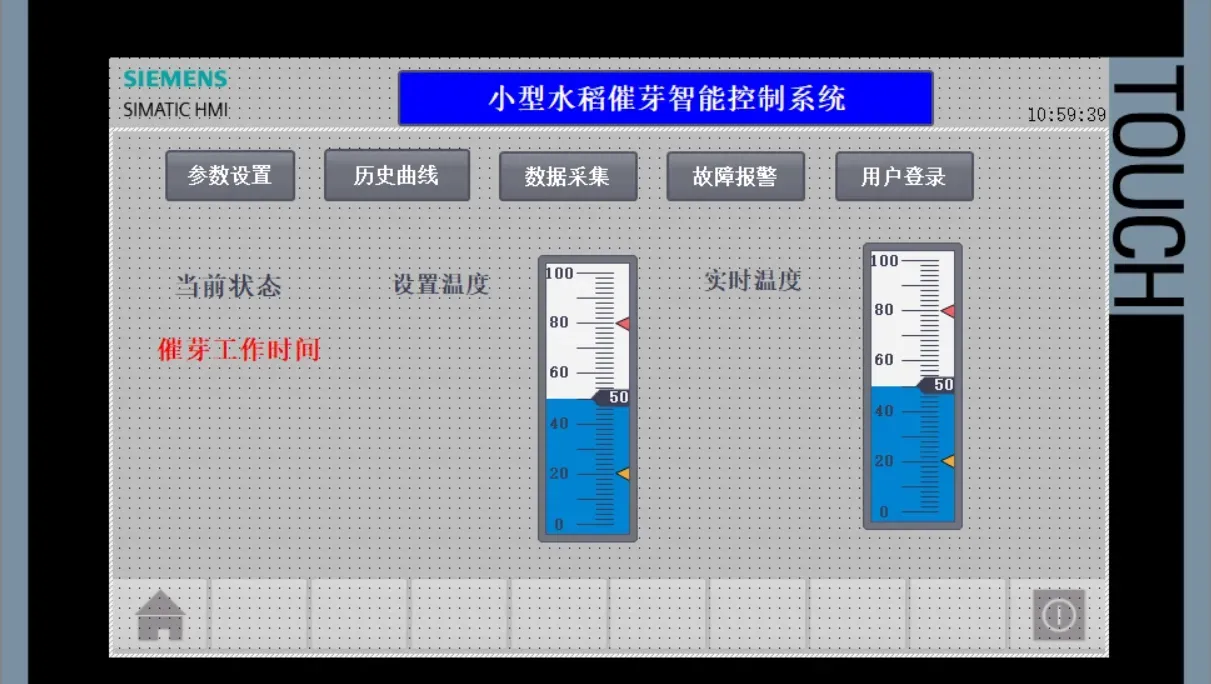
图7 系统人机界面
6 结束语
本系统主要根据小型水稻催芽的实际需要,利用S7-1200、触摸屏、温度变送器、电动阀门等控制器件,实现了水稻催芽流程的智能化控制[9-10];根据催芽环境的实际要求,利用模糊PID算法实现了催芽水温的准确控制;本系统简单、实用,便于推广。
猜你喜欢
装备制造技术(2019年12期)2019-12-25 03:06:36
电子制作(2019年12期)2019-07-16 08:45:44
成都信息工程大学学报(2019年1期)2019-05-20 09:14:24
电子制作(2018年12期)2018-08-01 00:47:40
知识就是力量(2018年7期)2018-07-11 06:39:56
梧州学院学报(2015年3期)2015-02-28 17:55:11
自动化博览(2014年12期)2014-02-28 22:34:26
河南科技(2014年12期)2014-02-27 14:10:32
华东理工大学学报(自然科学版)(2014年4期)2014-02-27 13:49:16
自动化与仪表(2014年10期)2014-02-26 08:21:30