城市轨道交通车辆与信号系统接口分析
2022-04-15 11:33冯光旭
交通科技与管理 2022年7期
冯光旭
摘要 信号系统作为控制车辆的重要构成,承载着保证驾驶过程中车辆安全以及提高运输的效率的作用。研究城市轨道交通车辆与信号系统接口,促进城市轨道交通的运营优化。文章分析了当前信号系统与车辆接口上存在的问题,根据问题提出相关措施。对城市轨道交通车辆的信号系统接口分析,提供一些合理的建议。
关键词 城市轨道交通;信号系统;接口
中图分类号 U284 文献标识码 A 文章编号 2096-8949(2022)07-0011-03
0 引言
城市轨道交通是城市建设的重点,在城市的交通系统中承担着重要的运输责任。城市轨道交通的信号系统通常是由两部分组成的,分别由列车运行的自动控制系统和车辆段信号系统组成。该文中重点研究的系统为自动控制系统的信号接口,为一些接口问题提出解决方案。
1 信号系统的全部组成以及实现的功能
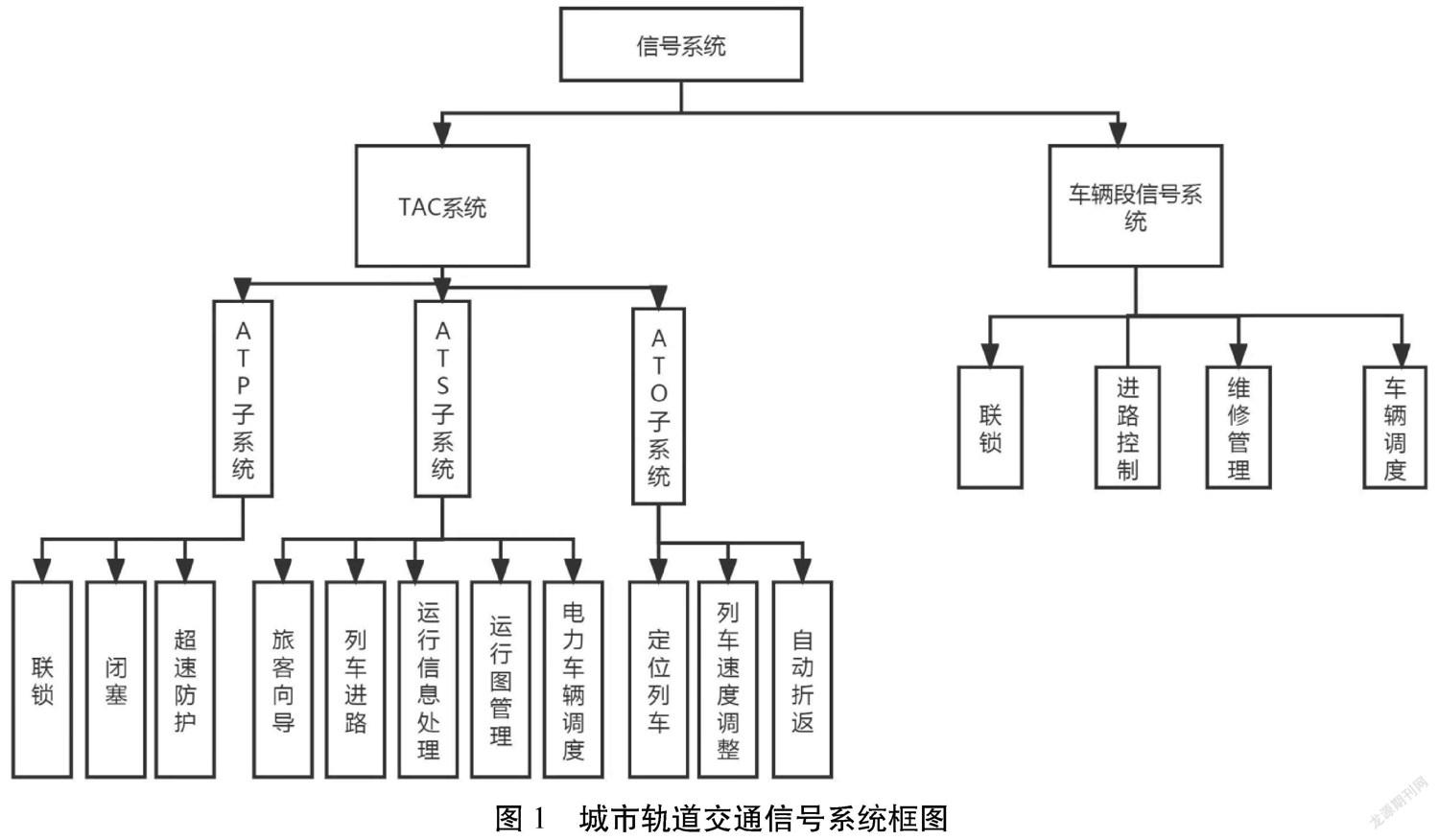
列车运行的自动控制系统和车辆段信号系统共同组成了城市轨道的信号系统,两个子系统彼此之间是相辅相成的,具体如图1。
自动控制系统中包括自动防护列车和自动运行以及列车自动监控三个系统模块,自动防护系统中包括联锁闭塞和超速防护;列车自动监控系统包括旅客向导、列车进路及间隔控制、运行信息处理、运行图管理及电力车辆调整;列车自动模型系统包括定位停车、列车速度调整、自动折返;车辆段信号系统包括联锁、进路控制、维修管理、车辆调度[1]。列车自动防护系统的主要功能是对超速的时候进行防护,系统会对列车的允许运行速度和列车负载后实际的速度进行结合。让其发挥最大的价值,并且一直在安全的情况下运行。当车辆的列车自动防护系统开启后,一旦速度超过系统设定的数值,系统就会发出命令,让列车自动制动。当列车自动防护系统检测到列车的速度降到安全数值后,该模式就会自动缓解。列车自动防护系统还具备各种防护功能,例如,列车位置彼此的安全间隔、停车点以及速度的检测;还有故障报警和在运行过程中速度的自我调节控制记录司机的驾车操作等,以保证驾驶的全部行为安全。同时,还可以与列车自动运行系统和列车自动监控系统实行联动与交换信息的功能。
列车自动运行系统的基础概念为实现列车与车站位置定位自动停车的功能。列车自动运行系统的主要功能是监控列车和地面信息的驱动控制,包括对于列车的自动折返的过程。其中自动驾驶属于列车自动运行系统的基本功能,可见其未来的潜力之深[2]。除此之外,列车自动运行系统还有着PTI系统支持和巡航等基础服务功能。该系统能够为乘客提供更加优质的乘车体验以及乘车过程的精确度,在长途驾驶的过程中,避免出现工作人员驾驶疲劳的情况。
列车自动监控系统是一套集计算机科学拓扑学及数据通信于一身的综合性系统模块,通过所有模块对于列车的运营和信号管理进行控制。列车自动监控系统详细的功能是对于列车任何功能的绝对控制,以及在列车运行过程中所有行为的全程监督[3]。从而方便工作人员对车辆现状的了解,对于车辆进行实时监控和管理。列车自动监控系统共分为两个子模块,分别是控制中心系统和集中控制站设备。列车自动监控系统的主要工作路径为:从调度员工作站到调度长工作站对于列车进行检测,经过FAS监测系统和SCAD监测系统进行数据检测。最后再通过外接输出设备将运行图和时刻表进行输出工作,与此同时值班员的控制台也会收到信息。其中的功能有:在一定的区域内车辆的运行状况的监控、在进路的过程中进行前路监控、对于列车之间的间隔情况进行实时反馈、对于出现的异常进行实时监控反馈以及自我优化调整、列车车次号码的自动传递等。
2 信号系统与车辆之间关系和相关接口
在列车的运行过程中,接口能够为车辆带来实时监测的信息,帮助工作人员及时处理故障,减少故障排查花费的时间[4]。不但降低了车辆运行成本,还减少了在人力成本上不必要的浪费。车载信号与车辆系统拥有的接口,大致可以分为三种类型,分别是车辆电路为车载控制器提供的电源、车辆电路在车载控制器端的信号输入、车载控制器给车辆电路的输出命令。在地铁的设计中地铁列车一共存在七种模式,其中的OFF模式是为了VOBC和控制中心的通信状态下准备的关闭模式;一旦启动了这种模式,VOBC会开始执行紧急制动的命令。AUTO模式则与之相反,驾驶员只需要在车辆启动时开启就可以。PM模式则是一种自动驾驶模式,在VOBC的检测下为汽车提供无人驾驶且全程对命令进行检测。ATP反向模式,重点监测列车与站台的距离,当列车离站台过近的时候就会对列车进行退回的操作,让列车重新保持与站台的安全距离[5]。PM模式是一个检测程序,当列车在人工驾驶的过程中会对于司机的命令进行全程监测。CUT-OUT模式下,VOBC模式就会彻底失灵。列车将不会自动发出任何命令,全程由驾驶员对列车进行把控。一旦VOBC模式出现故障,无法保证乘客的安全。CUT-OUT模式就会成为救命稻草一般的存在。在列车的运行的过程中,VOBC模式就会全程开启对于各个模式的检测,出现了任何一个模式的不回应,VOBC就会陷入故障模式发出警报。在列车自动防护系统加成的模式下,列车自身就可以实现控制列车的时速和完成智能折返作业。在列车自动监控系统开启的状态下,列车可以自由实现反复智能折返。在折返的过程中,信号系统车载设备牵引力、智能指令、针对路况的列车速度要求以及制动控制的装置;这几类功能模块都会根据实际情况及时做出相应调整。信号系统车载设备会为列车的两个车门设定专属的释放信号,分别是左门释放和右门释放。当出现了释放的命令以后,车门只会接收到开门的命令,对于关门的指令会做出不执行的决定。在此功能的加持下,可以保证乘客的安全,避免意外事件。与此同时,信号系统车载设备也会给车辆提供紧急的制动信号。在紧急情况的道路上,如果出现失电的情况后可以自动发出紧急制动命令,让车以最安全的状态逐渐降速为零。
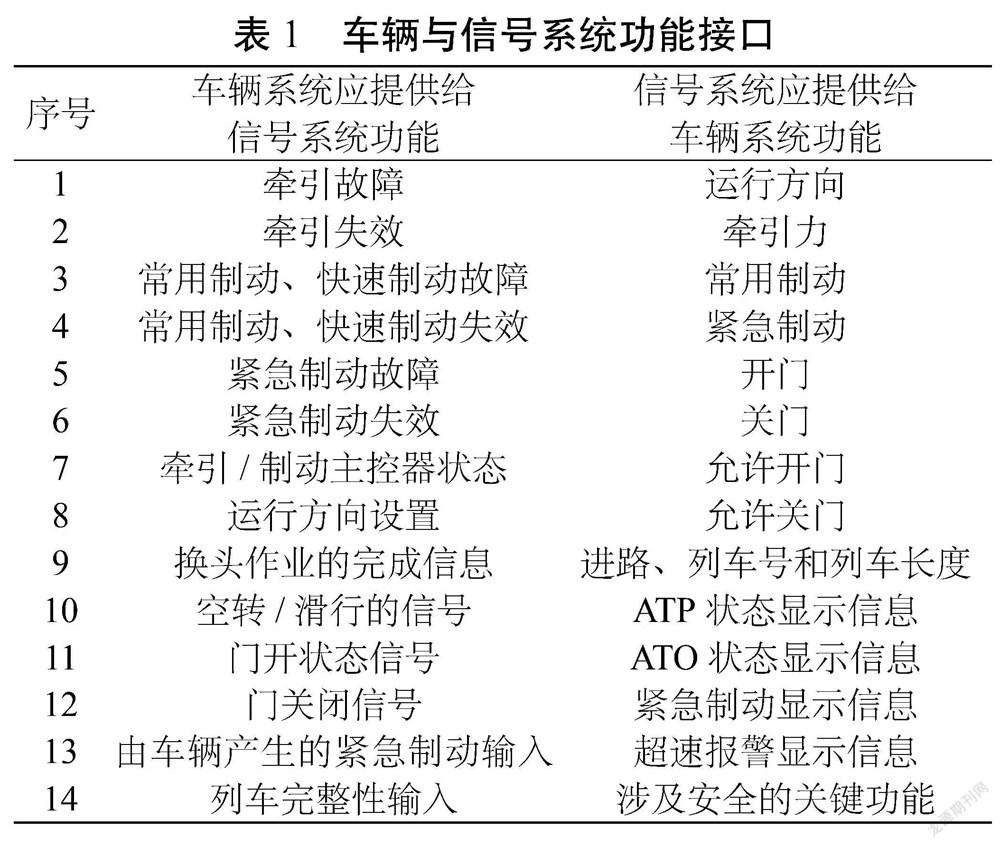
车辆系统能够提供的信号系统功能有:列车的完整输入、车辆产生的紧急制动输入、门关闭的信号、门打开的信号、空转和滑行的信号、自动完成换头作业、运行方向的改变、牵引和制动主控制状态、紧急制动失效、紧急制动故障、常用功能制动和快速制动失效、常用功能制动和快速制动的故障、牵引失败以及牵引故障。信号系统应该提供给车辆系统的功能:涉及安全性的关键功能、超速报警显示信息、紧急制动显示信息、列車自动运行系统的状态信息显示、列车自动防护系统的状态信息显示、允许开门命令、允许关门命令、开门、关门、紧急制动、常用制动、牵引力的实时改变以及运行方向的改变,具体如表1。
3 信号系统与车辆之间相关接口的参数
车辆自身要为信号系统提供的接口信息以及相关参数有以下要求:
(1)列车自身的电气系统的频率参数以及灵敏度水平的测试参数。
(2)与信号设备靠近的接地点。
(3)列车在行驶过程中用到的线和用到的电缆相关数值。
(4)列车自身带的管理通信系统的相关协议和彼此相应的时间。
(5)信号设备中要用到的DC 110 V的电源断路器的参数与特点。
(6)执行命令的反应时间,例如接收到门控命令到门做出执行命令的时长。
(7)列车执行惰性命令的反应时长。
(8)列车一旦接收到ATC信号的执行命令并且执行命令启动牵引的反应时长。
(9)当列车的任何一个单元出现故障以后,其紧急制动力的最快反应时长与常用的制动率。
(10)列车的牵引特性。
(11)列车在运行过程中常用的制动以及紧急制动的特点,还有速度变化的指标。
4 信号系统在安装车辆过程面对的问题
在进行列车安装的过程中,经常会出现很多车辆与信号接口的安装问题。该文列举出来一些重点问题进行探讨,通过分析寻找到解决方案。
4.1 接口的安装问题
在地铁安装成功后还未运营时,让其在规定的路线上,进行千百次的模拟测试实验,不断完成重复的工作,以确认地铁下方支架的承受能力,推断出支架的状态以及使用的大概年限。在安装雷达的过程中,也要注意将雷达的工作面安装到轮对的反方向,避免废水沾污雷达表面,影响雷达正常运转。
4.2 车辆与信号接口安装问题
在车辆最初的设计阶段,要把车辆的详细驾驶功能以及信号系统的设计方案告知司机。地铁在驾驶的过程中司机控制器通常有选择模式与开关的选项。驾驶模式有非常多的选择,例如自动运行、限速运行和自动驾驶等驾驶模式。限速运行模式下,车辆会根据司机控制器设定的模式而对车辆进行限速处理。在向前与向后过程中限速运行模式的限制速度为25 km/h。
在列车的自动运行模式下,列车的折返方式分成四种。分别是列车的自动防护监督模式、人工折返的模式、非限制人工折返模式,以及无人自动的折返模式,最难设计的是无人自动折返的模式。在这种模式下,信号系统应该将折返时序的设计方案提供给专业人员,并且对该方案进行说明。明确指出在不同的时序程序中列车会自动执行什么命令。而专业人员也应该对内容进行进一步的扩充理解。车载信号系统进行紧急制动命令后,要进行的操作过程如下:
(1)将列车通过驾驶员人工驾驶的模式下驶入终点站,进入折返的正确路径。
(2)将驾驶室存在的两个开关均进行断联的操作。
(3)驾驶员在激活无人折返驾驶模式的操作至少保持5 s。
(4)无人折返驾驶模式能够快速得到所有门关闭的信息反馈。
针对上文情况进行细致的分析:在无人折返的情况下,系统会自动断开高断,就需要等待10 s后才可以重新发动牵引命令。针对这样的情况,有两个方案可以解决:前者为对于车辆进行修改,在按钮触发的过程中不断开高断,让高断一直运行。后者为信号系统上的改变,在信号系统的延迟牵引上进行改进。其延迟性可能会影响到折返的具体时间,在120 s内完全无法进行无人驾驶折返模式的开启工作。可能会造成一定安全隐患,对紧急情况是非常大的考验。
5 总结
城市轨道交通车辆与信号系统之间相辅相成,面对设定过程的各个阶段以及接口关系环节,要做到详细了解,对后续工作的开展进度以及工作效率都有非常强大的帮助。在日常工作中,人员需要日常检查与定期维护,不断学习科学技术,充分熟悉城市轨道交通车辆的设备、系统、线路等构造,提高管理维护效果。
参考文献
[1]何玉琴, 张潜. 城市轨道交通与信号主要接口问题分析[J]. 城市轨道交通研究, 2016(8): 33-35.
[2]马妍. 城市轨道交通无人驾驶系统中信号与车辆接口分析[J]. 城市轨道交通研究, 2018(6): 56-57.
[3]肖杰. 城市轨道交通车辆与信号系统接口研究[J]. 信息系统工程, 2018(10): 221-222.
[4]黄雷. 轨道交通信号系统与车辆接口的几个常见问题探讨[J]. 城市轨道交通研究, 2017(6): 234-235.
[5]劉毅. 城市轨道交通信号系统对外接口关键技术分析与实现[J]. 华东科技(学术版), 2018(6):89-91.
猜你喜欢
科学家(2021年24期)2021-04-25
电子乐园·下旬刊(2021年3期)2021-02-08
名城绘(2019年6期)2019-10-21
科技创新与应用(2016年34期)2016-12-23
山东工业技术(2016年23期)2016-12-23
中国市场(2016年32期)2016-12-06
价值工程(2016年30期)2016-11-24
企业技术开发·下旬刊(2016年9期)2016-11-23
科技视界(2016年3期)2016-02-26
中国信息化·学术版(2013年4期)2014-01-03