
集水下导航测量设备于一体的装置设计
2022-04-14 03:42:44李士涛刘海强宋潜新刘建为盖广辉
工程地球物理学报 2022年2期
李士涛,刘海强,宋潜新,刘建为,盖广辉
(东方地球物理有限责任公司海洋物探分公司,天津 300457)
1 引 言
受国际油价的影响,石油行业受到了很大的冲击。勘探投入的成本大大削减,作为乙方服务行业需以降低项目运行成本、提高生产效率为措施,实现企业盈利。目前海洋地震勘探船舶通常将洋流仪、声学测深仪通过船底开孔方式安装固定,或将二次定位设备以升降杆方式固定安装。当须更换损坏探头、清理海洋污垢、设备更新更换时,需要船舶上船坞方可进行。升降杆方式则需要回收收缩杆并将海底门关闭,进行密闭空间作业进行清洁,存在着一定的安全作业风险。以上设备安装方式,不仅仅要消耗大量的时间成本、经济成本,而且存在一定的作业风险。本文通过分析海上地震采集所涉及的导航设备信号采集原理和方式,如洋流仪、测深仪、二次定位、超短基线等,设计一种集水下导航探测设备于一体的装置。
2 研发需求
设计一种集多种导航声学设备探头一起的装置,并采用“侧挂式”固定于船舷一侧旋转收放,改变以往采用“船底式”安装洋流仪、测深仪方法或者单独安装的导航定位设备[1,2]。通过改变安装方式和设计集成探头,以实现降低地震采集项目设备安装成本以及提高设备更换、使用的便捷性;同时,在很大程度上降低设备维护的安全作业风险。
3 导航设备采集原理
海底节点地震采集施工所涉及的导航水下测量设备均采用声波在海水中发射、传播、接收的规律进行地球物理勘探辅助测量,主要包括测深仪、洋流仪、二次定位系统、超短基线定位系统等。其换能器发射频率不同(表1),声学信号不互相干扰,频率也决定了测量量程[3,4]。超短基线(Ultra-short Baseline,USBL)和长基线(Long Baseline,LBL)因为使用相同的应答器,频率相同,但这两套设备受采集任务区分,都是独立使用,不同时开启,相互间不存在声学干扰现象。

表1 海底节点采集导航设备频率
3.1 测深仪(Echo Sounder)
声波速度为关键参数,主要受海水的盐度、温度和深度影响。一般对于深水、浑水、软海底水域测深,采用低频(低于50 kHz)大功率换能器,频率越低,精度越低。较浅的清水硬底水域测深,可选用高频(200 kHz)换能器。
3.2 洋流仪(Acoustic Doppler Current Profiler)
利用多普勒效应原理进行流速测量。用于海洋地球物理勘探ADCP(Acoustic Doppler Current Profiler,ADCP)换能器通常为3~4个,ADCP轴线与换能器成一定角度,声波换能器作为传感器发射和接收信号。换能器发射短脉冲和长脉冲声波,遇到水体中不均匀分布的颗粒物、浮游生物等散射,由换能器接收信号,经测定多普勒频移而计算波束向的相对速度。
声学多普勒频移,即发射声波频率与回波频率之差由式(1)确定[5,6]:
Fd=2FsV/C
(1)
其中,Fd为声学多普勒频移(kHz),Fs为发射声波频率(kHz),V为颗粒物沿声束方向的移动速度(即沿声束方向的水流速度,m/s);C为声波在水中的传播速度(m/s);2为系数。
此时测得的“速度”是船速和流水速度的矢量和。采用底跟踪技术,由海底的回波测量海底相对于物探船舶ADCP的运动,通过海底回波多普勒频移计算船速,进而得到洋流的真实速度[7,8];其中,船舶姿态数据(艏向heading,纵摇pitch,横摇roll)对地震勘探船舶航行时发生的摇摆进行修正[9]。
3.3 声学二次定位(Acoustic Secondary Positioning)
声学定位系统的工作原理采用圆圆定位原理和最小二乘法统计技术, 把GPS(Global Positioning System,GPS)定位和声纳测距结合在一起间接定位[10-12]。换能器产生一种声纳信号发射给声学应答器,声学应答器再返回一个声纳信号给DAU(Data Analysis Unit),DAU将收到的信号进行处理,以确定声学应答器的组号、ID号以及声纳信号往返的时间,DAU将这些信号再传给计算机,计算机经过处理便可得到换能器与应答器间的距离(图1)。每个应答器至少要得到4个以上有效的测距值,测距值是由声波速度乘以声波时差得到。但在实际工作中需要更多的点提供冗余计算,再通过最小二乘法拟合确定出声学应答器在海底的实际位置。

图1 声学二次定位工作原理示意Fig.1 Working principle diagram of acoustic secondary positioning
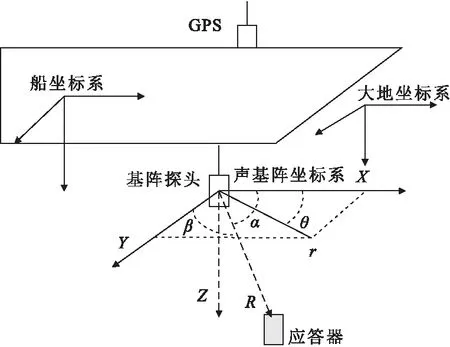
图2 超短基线定位原理及坐标系统[7]Fig.2 Ultra-short baseline positioning principle and coordinate system of USBL system
3.4 超短基线(Ultra—short Baseline)
超短基线水下定位系统主要由发射接收机(Transceiver)、导航控制单元(Navigation Controller Unit)、应答器(Transponder)组成[13];换能器基阵由一个发射换能器基元和4个接收换能器基元构成[14],通过测定声单元的相位差来确定换能器到目标的相对方位角,同时通过测定声波传播的时间来确定换能器与应答器的距离,再利用声波剖面修正波束线,最终确定声基阵与水下拖体目标的相对距离,从而确定目标的相对位置[15](图2)。在实际的海上地震勘探应用过程中,还配备有船舶的GPS定位系统、电罗经、高精度姿态传感器(横摇(roll)、纵摇(pitch)及船艏向(yaw)资料, 用于实时校正超短基线的姿态)等以进行节点实时高精度定位[16-18]。
4 方案设计
集水下导航测量设备于一体的装置采用不锈钢材质制作,通过电机绞车对侧挂式收放杆进行收放。该设计主要包括2个主体部分:声学收放杆装置和水下探头集成装置。
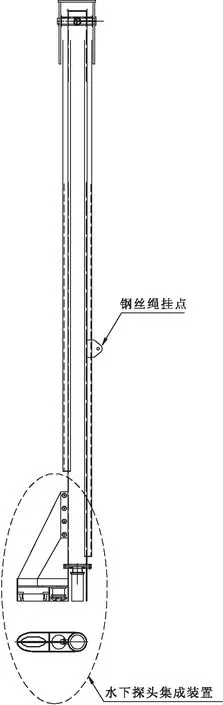
图3 声学收放杆装置Fig.3 Device of acoustic retrieval and deployment rob
4.1 声学收放杆装置
4.1.1 结构设计
图3为声学收放杆装置。该装置采用直径为30~40 cm的收放杆,内壁厚度为5 cm的空心钢管,声学杆子强度要求水下部分能够支撑船舶航行在3~4节航速所产生的海水冲击。收放杆顶端焊接于船舷一侧船舶支撑点,强度满足船级社要求[18,19]。且顶部装有固定可旋转轴承,中下部外侧设置吊点,其通过钢丝绳连接甲板上的电驱辅助电绞车对声学杆进行旋转式收放。声学收放杆船艏尾方向两侧分别焊有导流装置,以避免海流对收放杆的冲击造成杆体的振动而导致的采集信号假频。末端采用法兰结构与水下探头集成装置相连,并在侧面装有加强结构装置,以保证两部分主体连接强度。
4.1.2 考虑因素
1)海平面浅层有无数受破碎波浪产生的气泡,受气泡吸收和声能反射作用,其主要影响声波在水中的传播。因此,收放杆长度制作根据船舶的最大吃水深度,满足收放杆末端探头在船底下部1.5 m以上,以减少自生噪声的影响,确保信号采集。
2)推进式螺旋桨产生的机械噪声是大多数船舶的主要噪声源。噪音通过海水传播,严重影响换能器信号的发射与接收。因此,声学收放杆的安装位置应远离螺旋桨推进器产生气泡位置。
3)声学收放杆在水下的支撑强度将决定采集信号的保真性,故在船舶水下侧舷装有与收放杆相匹配的卡箍装置,以避免海流对收放杆的冲击而导致的采集信号假频。
4)船底的湍流对换能器的信号影响较大,换能器的安装位置应尽量避开湍流,所以安装在船体前1/3~1/2处(图4)。
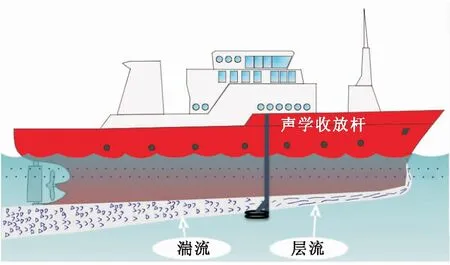
图4 声学收放杆船舶安装位置示意Fig.4 Sketch of acoustic retrieval and deployment rob installation on vessel
4.2 水下探头集成装置
主体采用集成探头设计(图5),通过法兰及外部侧面的支撑臂将集成探头与收放杆结合。采用可拆卸设备及法兰将超短基线、洋流仪、测深仪、二次定位4种设备探头固定,各个探头外部设有钢结构保护装置,其长度略低于探头外沿,以确保信号采集无遮挡。设置钢结构保护装置,一方面能够起到保护声学探头的作用;另一方面将各个探头物理性分割,避免电磁干扰现象[20,21]。内部设置有穿线孔,用于设备走线将探头与在船导航主体设备连接,所采用的供电或者信号电缆均满足行业要求,存在屏蔽层。集成探头安装向船艏一侧也装有导流装置,进一步减少海流对集成探头的冲击。

图5 水下探头集成装置Fig.5 Underwater probe integration device
5 应用效果
该设计适合水深10 m以上海底节点地震采集施工,采用“侧挂式”收放并将采集所涉及的导航设备集成到一起,可行性和便捷性较高。采用“船底式”安装需要船舶上坞,操作过程中存在磕碰导致声学设备损坏的隐患。还需要在船底开洞穿线,安装导流罩,整体工程量较大,费用较高。如果采用“侧挂式”安装可以有效地避免采用“船底式”方式时设备损坏船舶需要上坞所消耗的项目运行成本。
该设计在南海水域OBN(OBN,Ocean Bottom Node,海底节点采集)施工中得到了成功的应用。由于设备的频率不同,各个设备发射和回收的信号互不干扰(USBL和二次定位不同时使用),如图6所示,在进行声学定位时,同时采集的洋流仪数据,测深仪数据,OBC12数据,数据接收稳定,信号跳变较少。本文针对“船底式”和“侧挂式”声学集成探头两种方式所采集的声学二次定位数据和测深仪数据进行了对比(图7),误差分别小于1 m和0.5 m,均符合行业要求。集成探头洋流仪数据按照10 s采样,所获得的每层数据齐全,满足行业要求。超短基线采用自校准方法,校准结果较好,且与声学二次定位结果对比误差较小,可用于实时指导节点铺设。
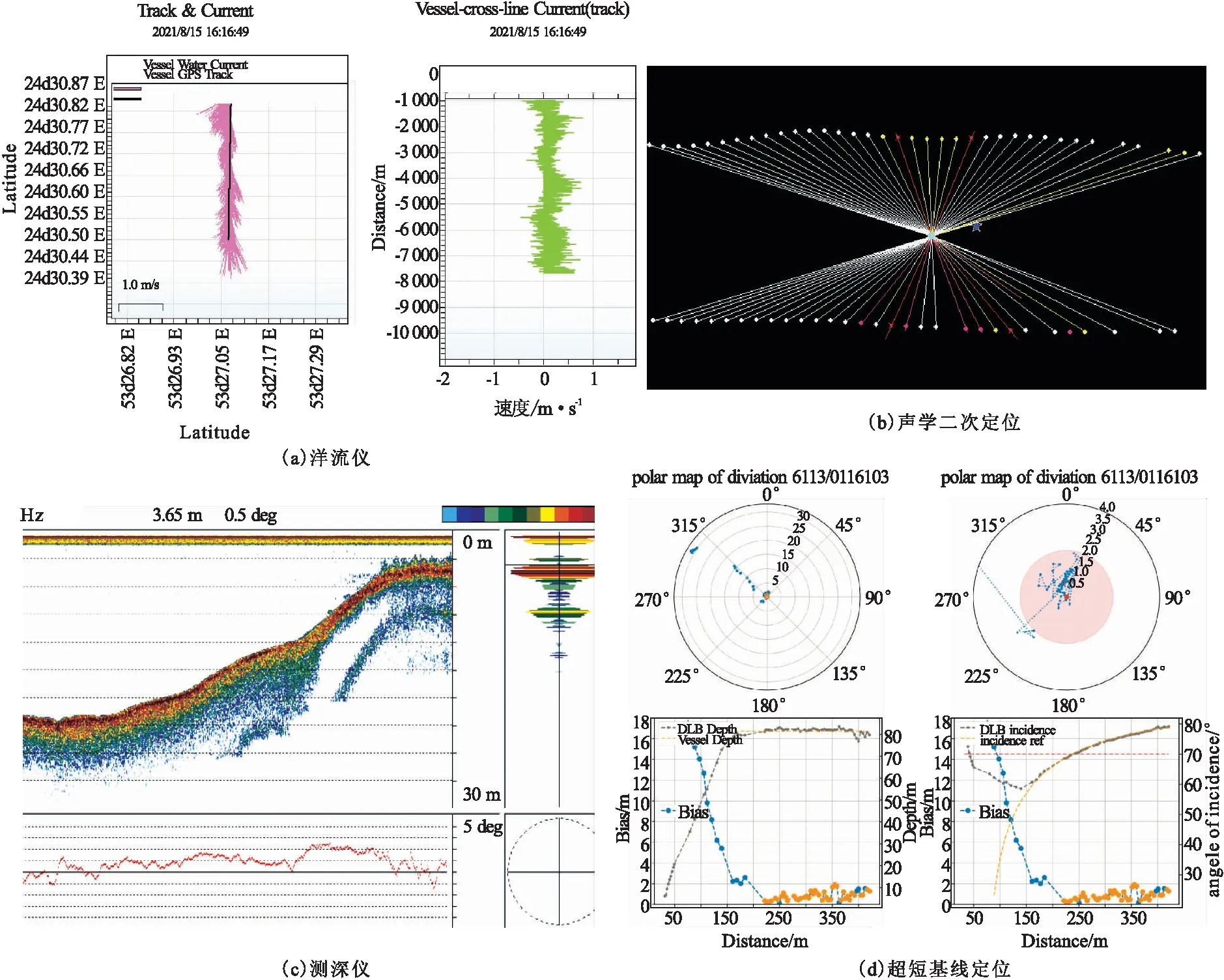
图6 四种导航测量设备集成于一体的装置在南海水域OBN勘探的应用Fig.6 Application of the device integrating four kinds of navigation and measurement equipment in OBN exploration in South China Sea
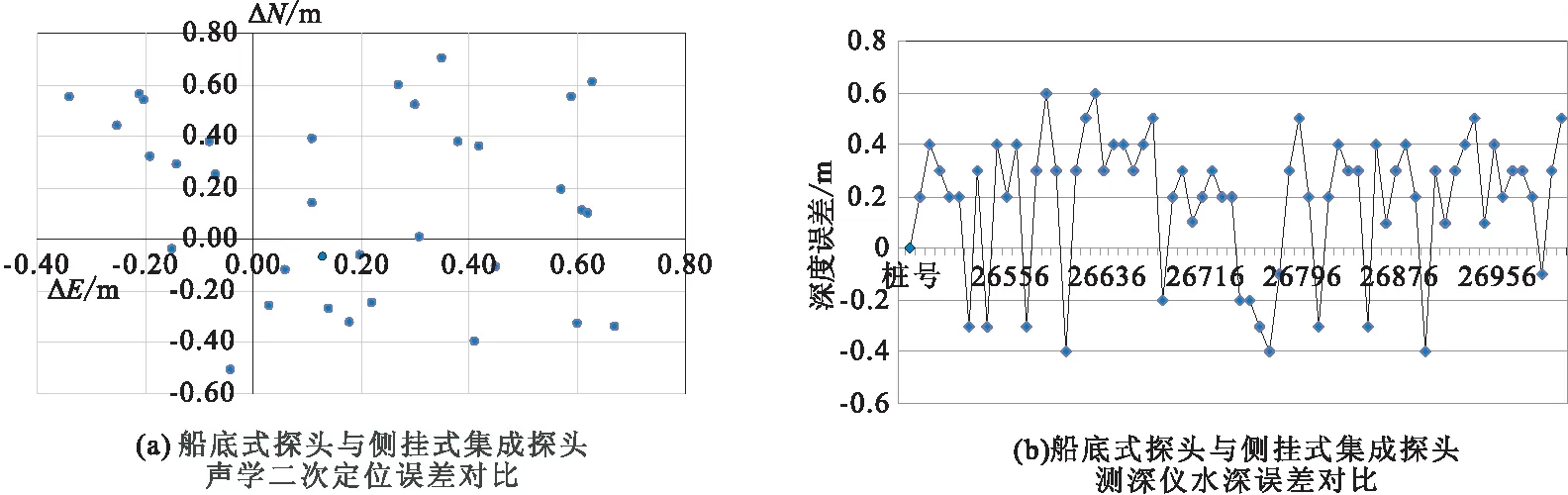
图7 船底式探头与侧挂式集成探头声学二次定位误差和测深仪水深误差对比Fig.7 Comparison of acoustic secondary positioning error and depth error of echo sounder with vessel bottom method and sidemount method of integrated probe
6 结 语
受全球疫情和国际油价的双重影响,海上石油勘探面临严峻的形式。在保证地震数据采集质量的前提下,如何提高作业效率、压缩作业成本和优化采集装备成为了勘探公司的主要课题。本文根据海上地球物理勘探导航设备应用的最新现状,通过分析OBN勘探中涉及导航测量设备的工作原理和采集频率,全面考虑各个采集设备的影响因素,如湍流、螺旋桨推进器、假频问题、集成探头深度等,有效地将4种导航设备集成在同一个声学杆集成探头内。该设计分为2个主体部分,声学收放杆装置和水下探头集成装置。其采用法兰固定和连接,焊接点、固定点及声学杆强度均满足船舶要求。
该装置研发和应用的成功,推动了海上物探装备的革新,彻底地避免了传统“船底式”、“收缩杆式”等安装方式造成的经济成本的消耗,降低了海上勘探设备投入的成本。同时,大大地降低了人员高风险作业几率。
猜你喜欢
家庭影院技术(2020年6期)2020-07-27 01:37:54
铁道通信信号(2020年9期)2020-02-06 09:15:22
家庭影院技术(2019年1期)2019-01-21 02:25:04
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年10期)2018-11-02 05:35:26
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
铁道通信信号(2016年4期)2016-06-01 12:10:19
雷达与对抗(2015年3期)2015-12-09 02:39:00
电源技术(2015年2期)2015-08-22 11:28:12
