一种模型和数据混合驱动的电磁频谱态势测绘方法
2022-04-14 06:33李泓余朱秋明丁国如杜孝夫
数据采集与处理 2022年2期
李泓余,沈 锋,韩 路,朱秋明,丁国如,杜孝夫
(1. 南京航空航天大学电磁频谱空间认知动态系统工业和信息化部重点实验室,南京 211106;2. 陆军工程大学通信工程学院,南京 210007)
引言
随着空天地信息网络一体化的不断发展,无线智能终端和业务的数据量急剧增长,通信、雷达、测控、导航、传感、电抗等各类电磁用频设备和系统的数量呈现爆炸式增长,各类电磁信号已经深入到人类社会的方方面面,导致电磁空间日益错综复杂,具体表现为日益稀缺的频谱资源与已分配频谱资源利用不足之间的尖锐矛盾愈发突出。因此,需要提升自动化频谱监管能力、维护空中电波秩序与安全以及保证各种无线电业务的正常进行。为了实现上述目标,需要分析预测复杂电磁空间的当前状态和未来趋势,也就是对电磁空间进行频谱态势感知。但是,为了获取感兴趣区域的电磁频谱态势测绘,仅仅是孤立、分散、未经关联的频谱数据难以提供有力的支撑,所以将孤立、分散、静态的频谱数据整合成一个整体、动态、关联、可视的频谱态势具有重要意义[1]。频谱态势感知的目的是监测在未知发射机附近的已知频谱的占用情况,也就是根据电磁频谱地图对大且连续区域上的功率谱密度进行估计。
现有的电磁频谱地图考虑到实际中电磁空间分布的差异性,从时间、频率、空间和信号值强度等多方面维度对电磁环境空间进行定量描述,并结合地理信息对电磁能量分布等信息进行可视化。但是,目前电磁环境空间中的信号功率谱密度可视化主要集中在一维或二维,不能综合利用多维度监测数据的关联关系实现目标区域的三维频谱态势呈现。另外,目前频谱数据信息的获取方式为固定式监测采样和移动式监测采样。固定式监测采样的优势在于可以实现目标域内全频段、全时段以及全目标信号在固定区域内丰富的数据信息,但是固定式设备主要是依据用户密度(城市或高射频密度区)而建立的,面对目标区域不在监测范围或超过监测范围的情况下,需要重新部署监测设备,短时间内难以完成并且会消耗大量人力与财力。可以看出,固定式采样适用于单一固定区域的数据采集。移动式监测采样的优势在于可以快速、准确地实现感兴趣时间段、频段以及感兴趣目标信号在任意区域内的数据信息采集。机动性可以保证在数据采集、频谱监测等任务需要更换目标区域的情况下,频谱信息的获取更加及时和准确。例如,当任务区域在非合作方或地形区域复杂的情况下,采用无人机监测采样设备完成任务变得更加实际并且减少部署固定监测采样设备所需的人力财力。特别地,在因较低的发射机功率电平、较强的天线方向性和特定的传播特性导致固定监测台无法进行测量的情况下,移动设备发挥着重要作用。可以看出,移动式采样适用于多种区域在关键频段、时间段的数据采集。面对日益复杂多变的电磁频谱环境,有针对性、高效地获取多个重点区域在关键时段和频段的频谱态势情况对提升频谱管理人员精准决策的效率将更加关键并有助于维护电磁空间安全。综合来看,采用移动式监测采样设备获取目标区域的频谱态势情况是不可获取的一种重要方式。
因此,本文基于上述背景,从提高采样效率与降低采样成本出发,提出利用无人机采样实现目标区域内的信号功率数据获取,得到缺损二维、三维频谱态势,进一步地提出基于模型和数据混合驱动的电磁频谱态势测绘方法,从而实现目标区域内部完整频谱态势的恢复。为了实现基于无人机采样的二维、三维频谱态势测绘并提高补全精度,本文主要工作如下:
(1)构建了基于无人机采样的电磁频谱态势测绘模型。无人机采样下,采样范围得到提升,采样时间得以缩减,可以快速获取目标区域内缺损频谱态势,提高采样效率,降低采样成本;
(2)提出了一种模型和数据混合驱动的电磁频谱态势测绘方法。该方法将基于自回归的预填充模型和反距离加权算法结合,实现无人机采样下缺损频谱态势的精确测绘;
(3)通过仿真得到如下结论:从电磁频谱测绘效果对比,本文提出的基于模型和数据混合驱动的电磁频谱态势测绘方法优于现有算法。
1 国内外研究现状分析
1.1 电磁频谱态势测绘方法调研分析
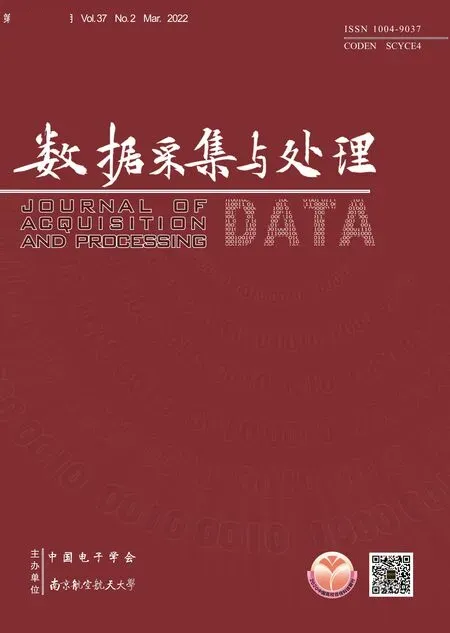
频谱态势测绘也可以称为电磁环境频谱地图构建。电磁频谱地图的构建方式可以分为空间插值法、参数构建法以及混合构建法[2],见图1,也可以分为模型驱动和数据驱动的方法。
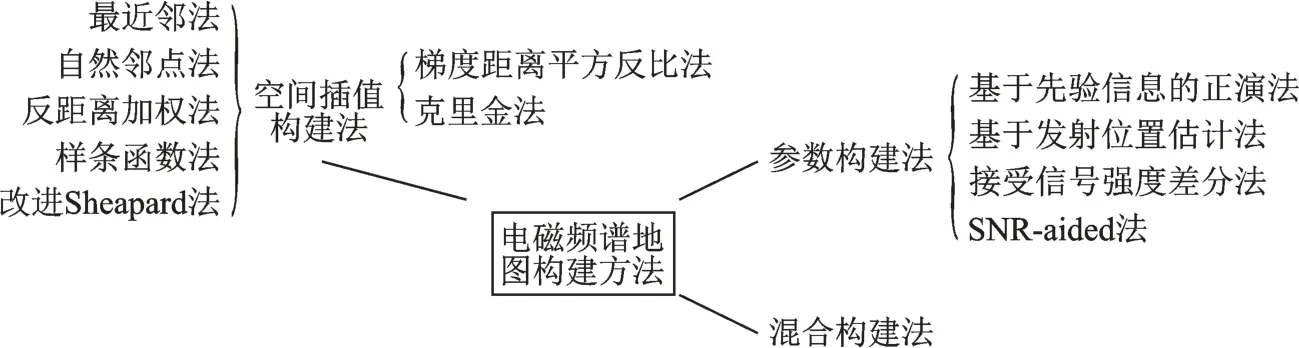
图1 电磁频谱地图构建方法Fig.1 Construction method of electromagnetic spectrum map
1.1.1 模型驱动的电磁频谱态势测绘方法
基于模型的方法还可分为基于参数或无参数的方法来表明电磁空间和频率域的相关性。文献[3]考虑单个窄带无线发射机,已获取采样数据的基础上采用包含路径损耗指数与发射机位置的参数路径损耗模型,其中参数的求解通过最小二乘法得到。非参数模型的方法不采用信道模型相关参数而选择传感器参数,此方法的关键在于选择合适的核函数去逼近信道模型。文献[4]采用薄板样条径向核逼近信道增益,文中假设每个发射机的功率谱密度可以在频率上分解成为一组已知的重叠功率谱密度基函数,接着描述了每个基函数对任意位置上功率谱密度的影响,最后利用解中功率谱密度基函数的稀疏性和相邻位置预测功率数值的平滑性并采用变分最小二乘法求解估计位置处的功率谱密度值。
总的来说,在信道模型已知的情况下,选用参数模型法精度更高,但是由于其缺乏灵活性,并不适用于复杂和异构的传播通道,在实际应用中操作困难;非参数模型法可以用任何信道函数以任意精度逼近复杂的信道传播模型,但是筛选合适的核函数非常复杂。综合来看,模型法对于先验信息的要求和信道传播模型中辐射源位置等信息的要求很高,在未知电磁环境上述信息的获取都十分困难,这就对模型驱动法完成电磁频谱态势测绘提出了挑战。
1.1.2 数据驱动的电磁频谱态势测绘方法
数据驱动法将特定位置的功率谱密度值表示为相邻传感器测量值的组合。文献[5]提出修正测量位置与插值点之间角度的反距离加权算法。除确定性插值法,文献[6]提出一种随机性插值法,即在任何一对位置的功率谱密度的协方差是已知或者可以从测量值中估计出的情况下,使用普通克里金法估计信号功率值。插值法还可以和其余算法结合,例如,文献[7]提出大幅度提升预测效率的基于近邻传播聚类的自适应普通克里金算法。
除插值法实现补全以外,文献[8]首次提出利用低秩性从已知测量样本中快速获取完整的频谱状态,从而实现矩阵补全。张量作为矩阵概念的高维度拓展,可以更好地表达高阶数据内部复杂结构本质的能力。将矩阵的低秩性拓展到张量的低秩性,文献[9]针对多维频谱地图重新构建,提出结合预测模型的频谱张量补全算法,捕获到不同维度数据相关性,在先验信息已知的情况下实现有效的预测和缺失数据恢复,文献[10]提出一种基于ROI 框架的无人机部署方案来实现感兴趣区域三维频谱态势的映射。另外,随着各种学习方法的发展,文献[11]提出了频谱大数据下的机器学习框架,并系统总结了在频谱大数据环境下具备独特优势的机器学习技术,文献[12]提出一种学习并准确利用无线电传播特征的基于生成对抗网络的频谱功率图估计方法。
数据驱动法可以直接从测量值附近估计待测值,构建采样范围内的不规则频谱地图,但是为了实现高精度,对传感器放置位置和测量误差的要求更高。
综上,模型驱动和数据驱动各有优势。基于先验信息的模型驱动法补全精度高,但是在资源有限的情况下先验信息的获取较为困难;通过构建相邻数据间某种关系函数完成补全的数据驱动法适用性更强,但是现有研究中大部分用于电磁频谱地图构建的信号功率数据都是通过在目标区域内分布大量离散传感器点采样获得,并且对传感器的分布有一定的要求,这导致采样过程复杂、消耗大量资源。
1.2 电磁频谱态势测绘应用系统调研分析
目前,目标区域频谱态势主要通过频谱地图以二维形式呈现。代表性的有美国的电视空白频谱(TVWS)商用系统与美军的RadioMap 系统[13]。RadioMap 系统数据来源为所有潜在传感器获得的异构电磁空间监测值,主要给战术部队提供电磁环境感知能力,将感知结果叠加后以热力图的形式在对应战场区域的地图上可视化显示,从而实现战场环境中RF 状况的实时掌控,这为战场上动态电磁频谱管理、电子战与情报监视系统提供了强大支持,目前已经移交给美军陆战队并投入使用。欧盟提出“基于认知无线电系统测量与建模的感知无线电接入(FARAMIR)”项目[14],该项目的重点为探索提升无线系统对电磁频谱空间与频谱资源利用的频谱感知能力。FARAMIR 项目通过开发感知设备与对应算法,在处理分析采样数据的基础上为认知无线电网络提供频谱共享决策支持以及定位辐射源、干扰源,大大提升了频谱资源的应用与管理。除此之外,一些商业电磁频谱地图系统的代表有Spectrum Bridge、Google spectrum Database、Microsoft white space Finder 与Telcordia white space database,这些有社会性用途的二维频谱态势感知系统主要关注在VHF-UHF 频段之间的电视频道的电磁空间信息,目的是为了在对应频段的空闲频道上实现非授权用户无感知的频谱接入。
2 系统模型与问题建模
频谱态势是电磁环境空间内信号功率密度在不同坐标、不同频率与时间上的无规律的变化情况。面对日益复杂多变的电磁环境,快速准确地获取多个重点区域的频谱态势情况将有助于加强电磁频谱管控。基于固定式监测采样需要布置大量离散分布的传感器并且受限于固定的任务区域,而移动式监测采样凭借其机动性可以高效实现多个重点监管区域在关键频段、时段的数据采集任务。因此,为加强频谱管控,节省采样成本,本研究聚焦于在目标区域内通过无人机采样,并采用基于模型和数据混合驱动的电磁频谱态势测绘方法实现缺损二维、三维频谱态势补全,系统模型如图2 所示。本文将三维频谱态势γ(w,f,t)定义为该区域内不同三维坐标位置处包含变量(w,f,t)的信号功率的映射,w表示笛卡尔坐标系位置。为考虑建模方便,将频谱态势表示为γ(w,f)。
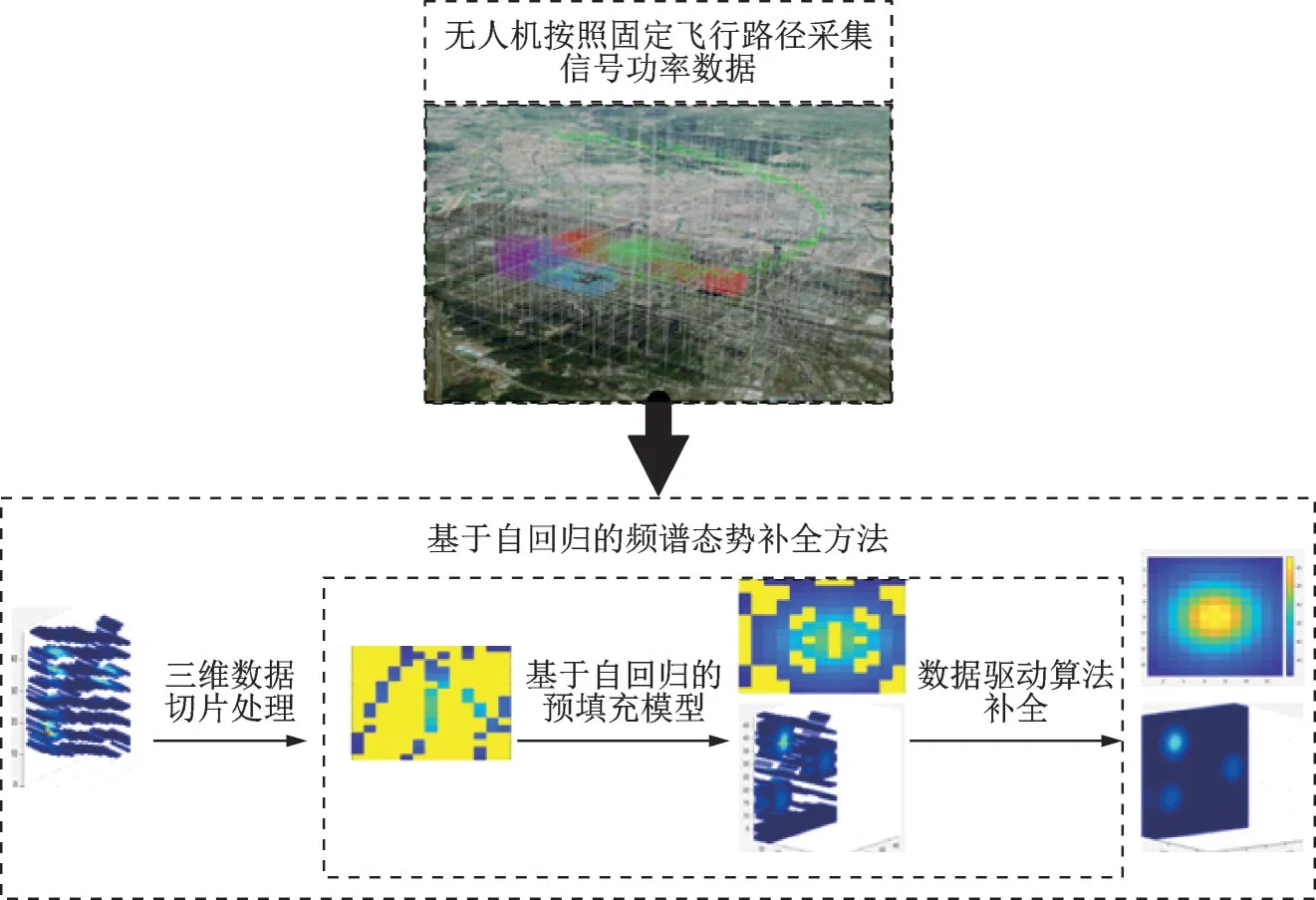
图2 频谱态势测绘模型Fig.2 Spectrum situation mapping model
首先,设置一个含有多个辐射源的三维电磁频谱空间γi,j,k∈γI,J,K,其中i∈I,j∈J,k∈K,这表示不同位置的信号功率值,I,J,K表示电磁环境空间的边界。在目标电磁环境空间内模拟无人机飞行并构建频谱态势测绘问题,设定γ~i,j,k为已知的无人机采样数据,γˉi,j,k为待补全数据,Γpre(γˉi,j,k)表示预填充数据,γ^i,j,k为缺损频谱态势得到补全后的完整频谱态势数据,因此补全过程可以表示为

式中:Icomplete表示补全算法,Γpre表示预填充过程,Q为辐射源的中心位置,wi,j,k为其余点位置,PL(d)为辐射源中心位置传播到其余位置的路径损耗,d为对应位置间的距离,d0表示参考距离,n为路径损耗因子。将信道模型引入频谱态势补全问题中,见式(2,3),可以看出,电磁空间内部任意一点的信号功率值和距离d有关,在目标区域内任意方向上,随着d的改变,该方向上大部分信号功率数值变化线性且稳定。因此提出一种模型和数据混合驱动的方法来实现目标电磁空间环境内的频谱态势测绘,即基于自回归的频谱态势补全方法。
3 基于自回归的频谱态势补全方法
方法流程如图3 所示,其中基于自回归的预填充模型和传统意义上模型驱动补全方法不完全一致。两种模型补全方法都用到了信道传播模型,传统方法在有经验模型的场景下利用传播模型信息与部分先验信息得到目标区域电磁频谱态势分布情况,而所提模型通过分析信道传播模型公式来获取目标区域内频谱数据的变化趋势并结合相应算法实现目标区域电磁频谱态势的初步呈现。初步补全后,更多频谱数据得以挖掘并且减少了大面积连续空缺区域,随后采用反距离加权算法和张量补全算法对预填充数据分别进行补全并比较,从而提高在无人机采样下,单独采用数据驱动对电磁频谱空间内缺损频谱态势进行补全的效果与精度。
图3 基于自回归的频谱态势补全方法Fig.3 Spectrum situation completion algorithm based on autoregressive
3.1 自回归时间序列
时间序列分析的意义在于可以发现和揭示现象的发展和变化规律,或者从动态的角度描述某一现象和其他现象之间的内在数量关系及其变化规律,提取出准确信息并用于预测未来的数据。时间序列模型对应到二维频谱数据中,可以看作是多个辐射源处的功率数值按照某种趋势向四周线性变化。因此,可以将时间序列模型引入到缺损频谱态势的补全中,基于数据间的变化趋势“预测”实现空缺位置的“补全”。
对于时间序列模型的选择,为了提高预填充的效率,选用自回归模型。标准的自回归模型,给定单一时间序列y∈RT,其时间间隔的数量为T,对于任意第t时间间隔,存在线性表达式

3.2 基于自回归的预填充模型
为实现空缺位置的频谱态势补全,面对多个完整的、较大面积空缺区域,由于大部分连续位置信号功率数值为0,仅仅基于数据驱动的方法,并不能挖掘出有效的频谱信息,导致靠近辐射源部位的数据补全效果模糊,只能大致得到辐射源的位置信息,而远离辐射源位置的补全效果则表现为过早地出现了信号功率值波动较大、变化趋势不稳定的情况。为了解决上述问题,结合所提模型对该区域内多个大面积空缺位置进行初步填充,便于数据驱动实现补全的过程中可以借助更多有效的数据信息,实现相邻空缺位置的精确补全。
为了提高预填充的效率并且充分利用采样数据信息,对三维频谱空间进行切片,获得多个含有采样数据二维频谱数据矩阵,接着基于自回归的预填充模型实现每个二维频谱数据矩阵中部分空缺位置的补全,最后完成整个三维频谱空间部分空缺位置的补全。基于自回归的预填充模型的实现过程示意如图4 所示。

图4 基于自回归的预填充模型实现过程Fig.4 Implementation process of pre-filled model based on autoregressive
3.2.1 初步填充
常见的预填充方式有就近插值、特征值填充与线性插值,除了这些传统的统计方法填充外,还有使用机器学习方法进行填充,比如属于有监督数据填充的KNN、RNN 和随机森林,以及多值插补和组合分析。本文中采用较为传统的统计方法进行第一步预填充。
就近填充法是用空缺数据的相邻位置的采样数据填充,线性插值方法需要拟合采样数据的趋势变化填补空缺位置的数据,上述两种方法都需要确定采样数据和空缺数据之间有较强的趋势性变化。未获取二维频谱数据较为明确的变化趋势之前,选用特征值填充法中的平均值填充

二维频谱数据进行均值填充之后,部分采样位置的数据获得了连续性,也挖掘出部分空缺位置的数据。由于离辐射源中心的距离不同,在不同的距离范围内,相邻数据的变化和该范围内数据整体的波动也是随着距离的变化而改变,为了实现每一个切片空缺数据的精确填充,需要对二维频谱数据进行范围划分。根据信道传播模型式(2,3)可以看出,单个辐射源中靠近辐射源中心位置的信号功率数据由于d很小,对应的相邻位置的Δγ(w,f)较大并且逐渐减小,当d达到某个数值d′,Δγ(w,f)开始慢慢趋于平缓。为了得到Δγ(w,f),根据二维IDW 算法对无人机采样数据进行初步补全,凭借预补全后的二维频谱态势图中“功率值变化趋势”确定Δγ(w,f)、λ,根据式(7)划分多个近辐射源位置γNEAR和多个远辐射源位置γFAR。

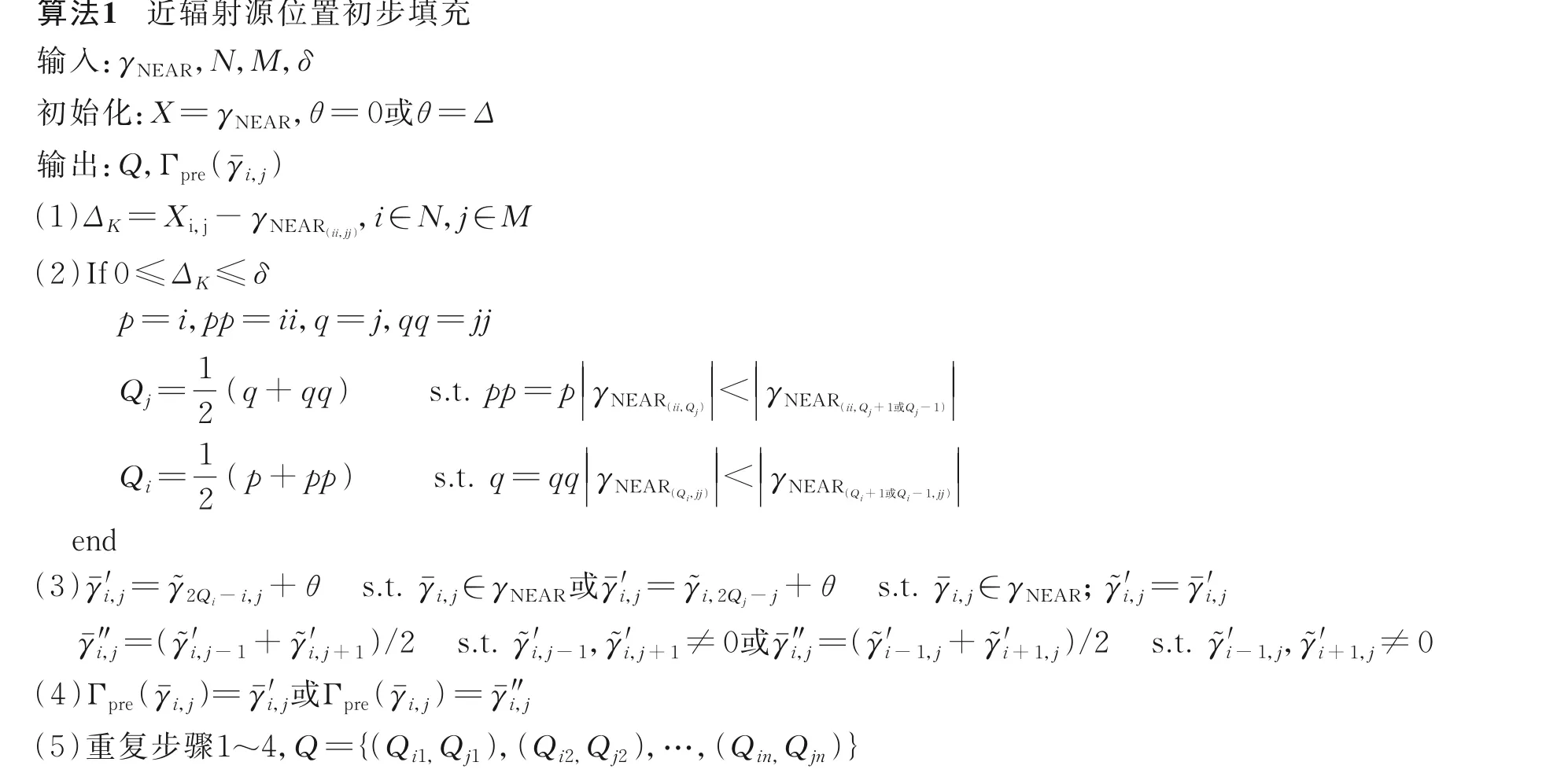
在d<ε(ε由Δγ(w,f)具体设定)的情况下,γ(w,f)主要由最近辐射源决定。根据式(2,3)可以看出,相同范围d内,近辐射源中各点和某位置为Q的点之间的信号功率变化趋势近似相同。基于均值填充的基础上,根据算法1 确定Q,并根据相同距离内数据变化趋势近似相同实现近辐射源范围内部分空缺数据填充,其中θ可以设置为0 或参考位置Q周围已知采样数据的差值Δ,δ为采样数据的最小差值,N、M为矩阵行、列。
初步填充的重要性在于为自回归序列填充提供了更多的连续数据以及为后续数据补全算法建立数据间的关系函数奠定基础,这对于提高感兴趣区域的三维频谱态势的补全有重要作用。
3.2.2 自回归序列填充
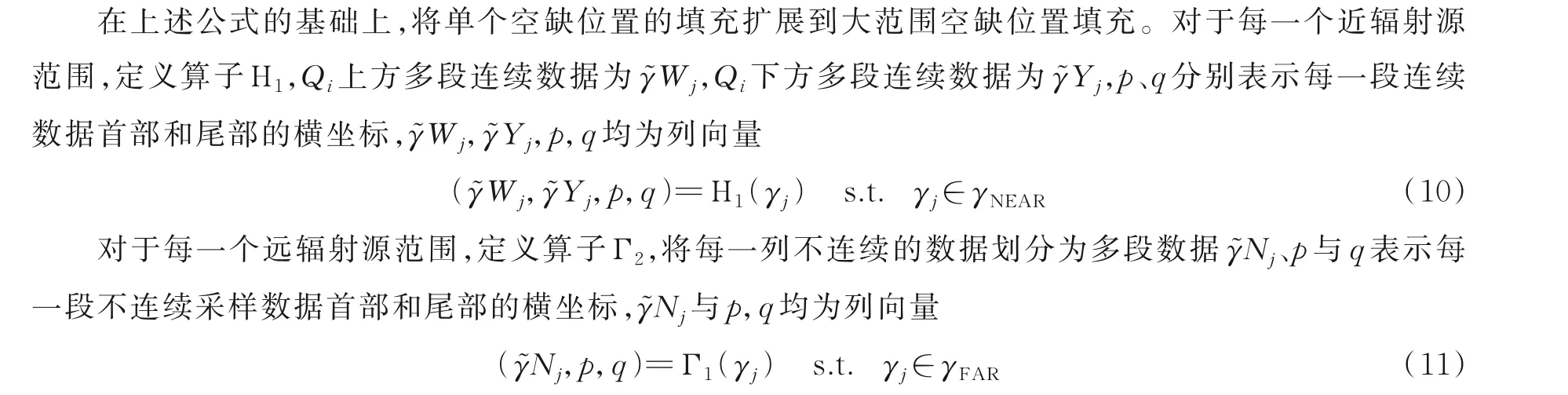
在多个辐射源的范围交界处,由于多种变化趋势融合,信号功率数据往往表现出不规则变化。为此,根据式(8)在近、远辐射源位置进一步划分填充范围,其中Γ 算子与H 算子分别表示基于坐标位置Qi分为向上远辐射源位置γ^FAR和向下远辐射源位置γˇFAR以及向上近辐射源位置γ^NEAR和向下近辐射源位置γˇNEAR。

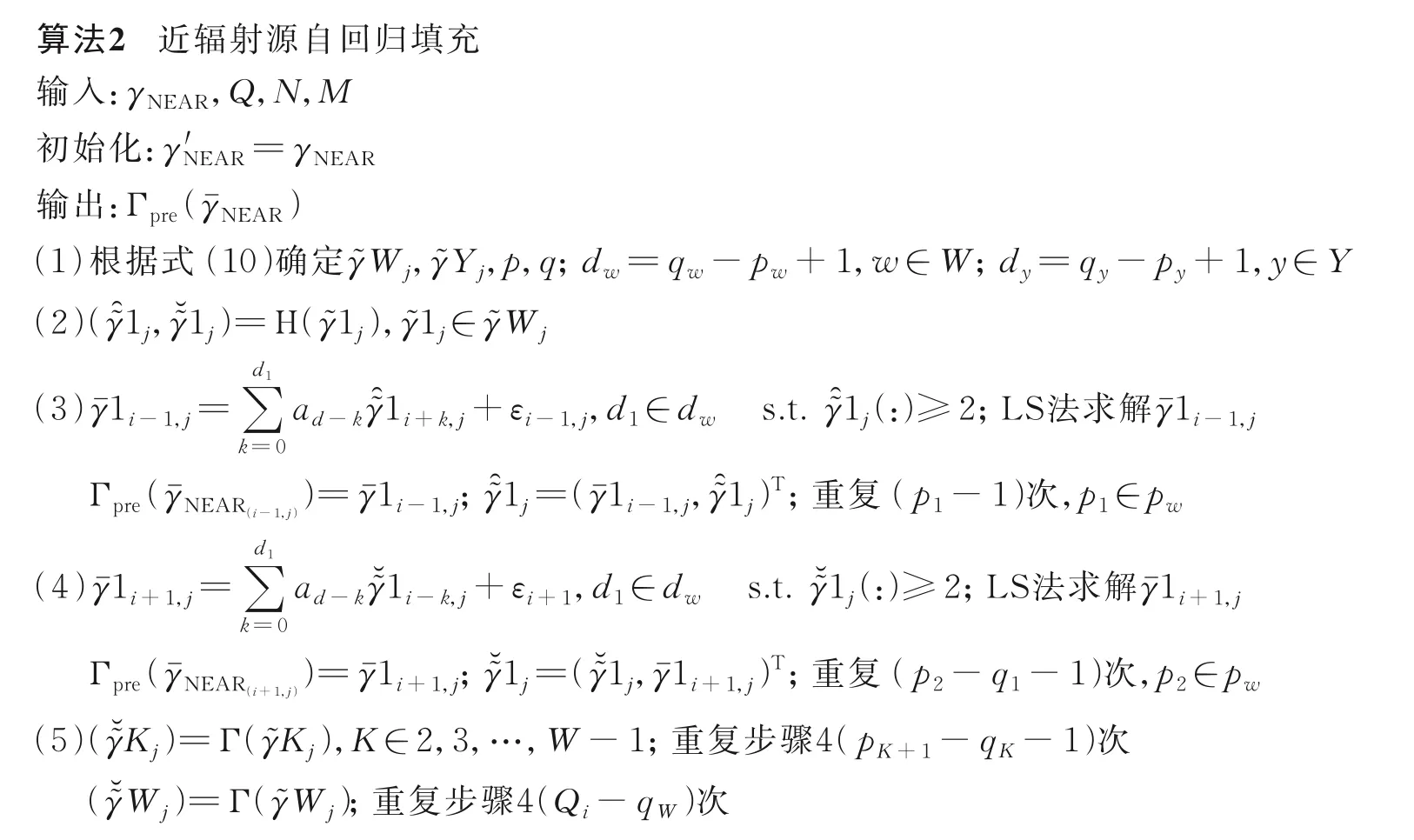
初步填充后,每一个切片的连续二维频谱数据增加以及满足线性变化且稳定的条件。基于式(3,4),将自回归模型引入满足上述条件的辐射源范围内,得到某一空缺位置的填充

频谱场强是以辐射源为中心,在多区域内呈现出近似线性变化的趋势。因此,为结合频谱态势,可以通过改变自回归序列的预测阶数以及排列方式,基于“行”或“列”方向预测来填充空缺数据。特别地,当面对某区域内采样点极少的情况下,为了最大限度挖掘频谱数据获取该区域频谱态势情况,可以结合“行”和“列”方向预测,实现交叉填充,从而提高区域填充率。算法2、3 分别为近、远辐射源位置自回归序列填充过程,是“列”方向预测,其中N、M为矩阵行、列。

另外,考虑到局部关键位置场强变化不稳定的情况对采用自回归序列实现空缺位置填充提出了挑战。为了进一步提高精度,针对区域内场强变化趋势不稳定的关键位置,提出预填充修正,见图5,修正规则如下:

图5 预填充修正示意图Fig.5 Schematic diagram of pre-filled correction
(1)如果黄色空缺位置中有一数值不为零,那么其余空缺位置的数值可以近似等同于所求值。
(2)如果黄色部分都为空缺值,那么可通过式(12)填充。其中Δγ~表示相邻数据的差值,μ表示预测系数,其余黄色空缺位置的数值可以近似等同于所求Γpre(γˉi,j)的均值。
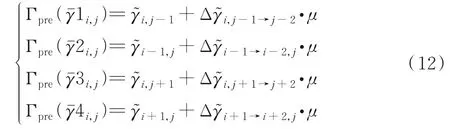
同理,蓝色空缺位置数据的填充也可采用上述方式实现。预测系数μ表示历史数据变化趋势的波动性,可以参照历史数据设置为固定值也可以根据自回归模型中的预测系数ak近似代替。
空间频谱态势中,随着各点和各辐射源之间距离的变化,在多个区域内,场强值表现出明显的趋势性变化,而自回归序列模型可以揭示一段数据的变化规律并提取出准确信息进行预测,得到下一段空缺位置的补全值。因此,基于自回归序列模型的填充算法能够实现多个空缺区域的场强值补全并提升关键位置的填充率,从而提高空缺位置间的数据平滑性和相关性,为后续提高数据驱动实现补全的精度奠定了基础。
3.3 数据驱动补全缺损频谱态势
基于自回归的预填充模型实现采样数据的初步补全后,三维空间中局部区域的频谱态势情况更加明确,数据间相关性和平滑性得到了大幅提升,低秩矩阵也更容易实现,这为数据驱动补全方法实现功率谱图绘制提供了较好的条件。例如,插值或随机场估计法中位置x的测量值权重wi的估计更加精确,见式(13)[16-17],式(14)[18]中空缺位置空间损耗场Sτ的补全更加可靠,其中cτ为发射机功率。因此,基于自回归的频谱态势补全算法可以分为基于自回归预填充模型的IDW 补全算法与基于自回归预填充模型的SILRTC 算法。

反距离加权算法(Inverse distance weighted,IDW)是数据驱动法构建电磁频谱地图的代表。它的基本原理是已知监测数据对未知点估计值的影响力完全取决于监测点到未知点之间的距离,即在未知点(iˉ,jˉ)处的估计值γ^(iˉ,jˉ)=γ^lock为采样数据γ~(i,j)=γ~lock的加权平均数,见式(13),其中每一个空缺位置的加权系数ak由该空缺位置和所有采样位置之间的距离dk的平方决定。三维反距离加权算法就是将式(13)中的二维坐标位置改为三维坐标位置,即可实现三维电磁环境空间频谱态势补全。

借助基于自回归的预填充模型得到初步补全的二维、三维缺损频谱数据,随后采用二维反距离加权算法对感兴趣二维频谱区域补全,即可测绘得到二维频谱态势图;采用三维反距离加权算法对三维频谱区域补全,即可测绘得到三维频谱态势图。
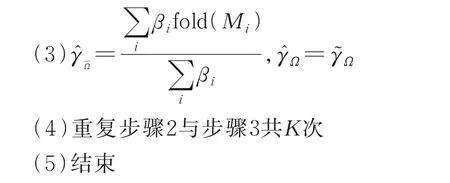
针对三维缺损频谱态势补全,除了所提算法,对比算法采用三维IDW 算法与简单低秩张量补全算法(SILRTC)。低秩张量补全最优化模型进行凸松弛后[19-20],得到式(14),在其基础上,将低秩张量补全引入到频谱态势补全,得到SILRTC 算法,见算法4。

4 仿真结果与分析
4.1 仿真配置
仿真数据选用PL-FREE(d0)作为自由空间传播损耗,PL-FREE(d0)=32.44+20lg(d0)+20lg(f)。其中,d单位为km,路径损耗单位为dB,工作频率f∈(25 MHz,125 MHz),d0=0.01 km,路径损耗因子n设置为8,噪声功率σ2设为10-5mW,设置3 个辐射源点,最大发射功率为867 mW,并考虑感知点的工作频率与发射机的工作频率不同的情况。根据无人机地面站飞行轨迹设置,选择目标区域为10*48*48 的三维电磁频谱空间,对应位置的无人机采样数据见图6,采样率为17%。
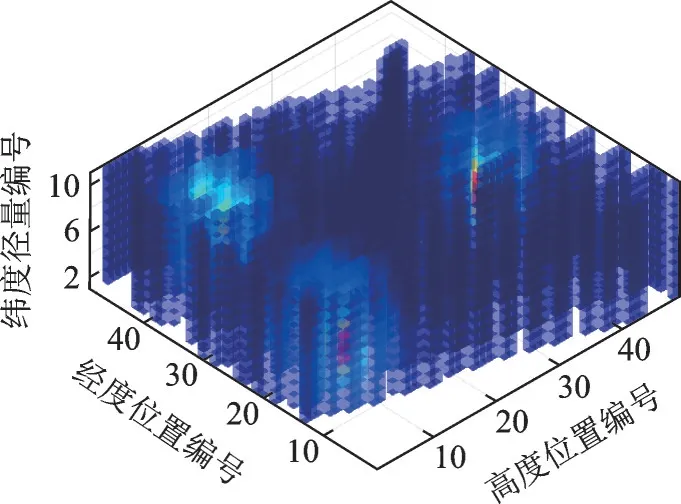
图6 无人机三维空间采样数据Fig.6 UAV sample data in a 2D slice and 3D space
二维、三维补全效果分别通过均方根误差RMSE2D,RMSE3D表示,见式(15,16),γ′表示补全数据,γ表示原始仿真数据,N、M、Z分别表示所设仿真空间中感兴趣范围的长宽高。

4.2 二维频谱数据补全算法对比
选取三维频谱采样数据中某一切片作为二维频谱数据补全仿真对象。基于自回归预填充模型的IDW 补全结果和IDW 单独补全结果的对比分别为图7~9,各自为某一切片中不同位置辐射源的仿真情况。从补全效果可以看出,前者补全性能更好,可以清晰地还原出辐射源位置并准确描绘出频谱变化趋势;从补全精度来看,均方根误差RMSE2D由原先的4.456 0 dB 下降到-3.195 7 dB,由9.471 4 dB 下降到1.300 4 dB,由7.256 1 dB 下降到-0.892 7 dB,见表1。
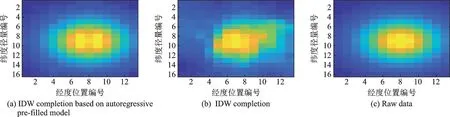
图7 高度位置为7 的频谱矩阵中1 号辐射源区域补全结果Fig.7 Result of the completion of the region of the No.1 radiation source in the spectrum matrix with altitude position 7
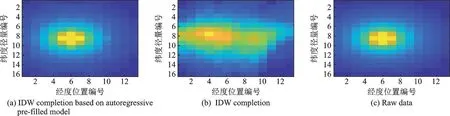
图8 高度位置为7 的频谱矩阵中2 号辐射源区域补全结果Fig.8 Result of the completion of the region of the No.2 radiation source in the spectrum matrix with altitude position 7

图9 高度位置为7 的频谱矩阵中3 号辐射源区域补全结果Fig.9 Result of the completion of the region of the No.3 radiation source in the spectrum matrix with altitude position 7
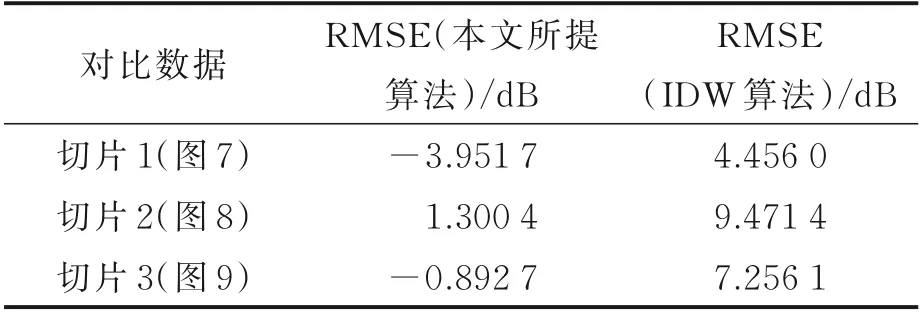
表1 不同算法的二维补全结果对比Table 1 Comparison of 2D completion results of different algorithms
4.3 三维频谱数据补全算法对比
本次三维频谱仿真数据见图10,其中,设置IDW 补全算法中参数K=6,SILRTC 算法中参数α=(1,1,0.001)以及参数βi=0.065。IDW 补全结果为图11,SILRTC 的补全结果为图12,基于自回归预填充模型的SILRTC 补全结果为图13,基于自回归预填充模型的IDW 补全结果为图14。对比图11、14 与图12、13 可以看出,结合模型驱动与数据驱动的补全方法可以清晰还原出辐射源的位置;对比图13、14,图14 可以准确测绘出辐射源位置并且整体补全效果更佳。对比均方根误差RMSE3D,见表2。IDW 算法补全结果为4.169 4 dB,基于自回归预填充模型的IDW 算法补全结果为-1.153 7 dB,补全精度得到提升,但是两种选用SILRTC 的补全方式的精度并不理想。综合来看,本文提出的一种模型和数据混合驱动的电磁频谱态势测绘方法中,基于自回归的预填充模型的加入实现了近辐射源处部分数据的精确填充以及远辐射源处数据的较大面积填充,最后选用可以结合辐射源远近变化规律的IDW 算法,完成目标区域二维、三维电磁频谱态势的精准测绘。单独采用IDW 算法,由于采样方式受限,关键位置数据空缺导致补全结果更多依赖于远辐射源处的数据,所以补全结果中辐射源呈现模糊状态。张量补全算法的补全效果取决于采样数据的分布以及占原始数据比重,资源受限的情况下,由于无人机不能进行大面积多个点的单独采样,导致采样数据中多个较大面积位置数据空缺,因此补全数据基本上依赖于相邻的采样数据或者空缺部分初始化的数据,补全结果最终表现为采样轨迹路线周围的数据呈现出一致化的趋势。
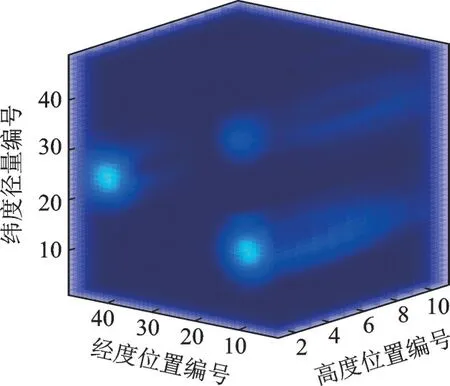
图10 电磁频谱空间原始仿真数据Fig.10 Original simulation data of electromagnetic spectrum space
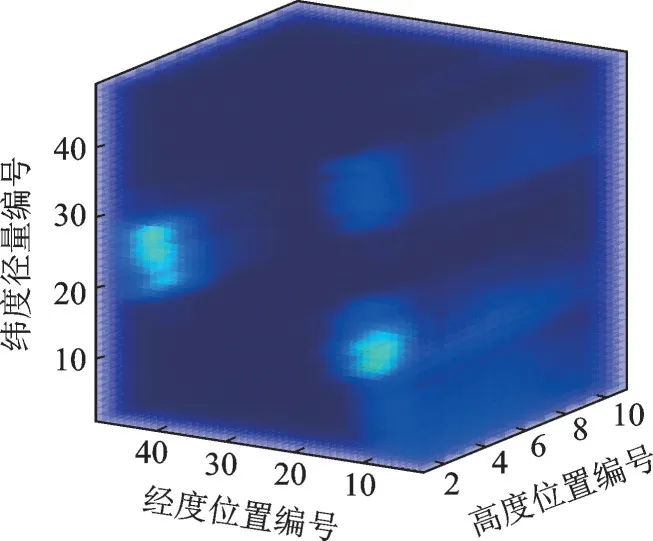
图11 IDW 算法补全Fig.11 IDW algorithm completion

图12 SILRTC 算法补全Fig.12 Completion of SILRTC algorithm
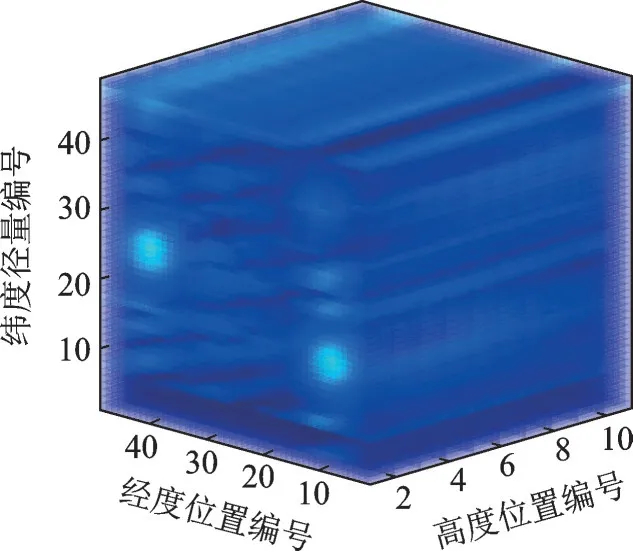
图13 基于自回归预填充模型的SILRTCFig.13 SILRTC based on autoregressive pre-filled model
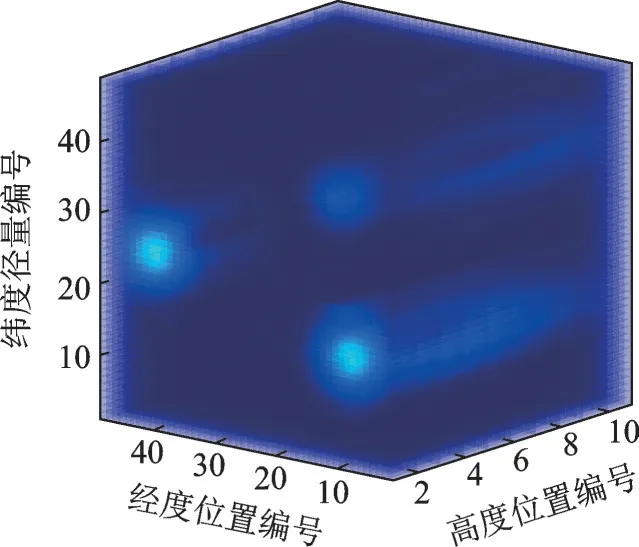
图14 基于自回归预填充模型的IDW 补全Fig.14 IDW completion based on autoregressive pre-filled model

表2 不同算法的三维补全结果对比Table 2 Comparison of 3D completion results of different algorithms
5 结束语
本文从提高采样效率与降低采样成本的角度出发,对实现目标区域内电磁频谱态势测绘问题进行了一定探索,提出无人机采样并采用基于模型和数据混合驱动的方式实现电磁频谱态势的精准测绘。同数据驱动完成测绘的IDW、SILRTC 算法对比,基于自回归预填充模型的IDW 补全算法可以有效的实现目标区域内二维、三维电磁频谱态势的恢复,并且可以准确还原出辐射源的位置以及状态,补全精度得到大幅提升,补全效果更加明显。由于低秩张量补全算法要求:(1)待补全数据满足低秩性分布,(2)待补全数据中不能出现大面积行、列空缺,在考虑采样效率与采样成本的情况下,上述要求对如何结合无人机采样与数据预填充提出了更大的挑战,因此,接下来将会对无人机采样定量融入基于模型和数据混合驱动的电磁频谱态势测绘方法进行进一步的研究。
猜你喜欢
社会科学战线(2022年4期)2022-06-15
空间科学学报(2021年6期)2021-03-09
北京航空航天大学学报(2020年10期)2020-11-14
汽车与安全(2020年1期)2020-05-14
中国外汇(2019年19期)2019-11-26
中国外汇(2019年16期)2019-11-16
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
移动通信(2017年3期)2017-03-13