
一种用于物流快递分拣的2-RPU/2-SPU并联机构设计
2022-04-14 12:50:18樊文龙李瑞琴王春臻王志浩刘建国
包装工程 2022年7期
樊文龙,李瑞琴,王春臻,王志浩,刘建国
一种用于物流快递分拣的2-RPU/2-SPU并联机构设计
樊文龙,李瑞琴,王春臻,王志浩,刘建国
(中北大学 机械工程学院,太原 030051)
针对目前大量的快递件需要进行分拣和搬运,为解决人力成本问题并提高物流线上的自动化程度,提出一种2-RPU/2-SPU并联机构。用螺旋理论对此机构进行自由度分析,求出此机构的运动约束。通过闭环矢量法求出该机构的位置逆解和各个支链间的相互约束条件。通过逆解和约束对该机构的运动进行仿真,求出此机构的可达工作范围。2-RPU/2-SPU并联机构具有两转两移(2R2T)4个自由度,分别是沿a轴移动,沿a轴移动,绕a轴转动,绕a轴转动,动作较灵活,工作空间范围较大,并且在机构运动过程中没有出现奇异位形的情况。2-RPU/2-SPU并联机构具有较大的工作范围,可以在物流线上进行分拣工作,并且在分拣过程中可以实现快速、精准控制,工作过程较灵活,运动性能良好,其中2R2T的运动性能能更好地适应分拣机构斜置时的分拣。
2-RPU/2-SPU;并联机构;逆运动学;工作空间;物流分拣
随着社会的不断发展,人们对购物的需求不断提升,伴随着购物量的上升,物流中心的物品分拣会消耗大量的人力成本,而自动分拣机器人的出现打破了这个局面。并联机构由于具有动态误差小、精度高、运动惯性小、承载能力强等优势在物流线上有广泛应用。胡建等[1]设计了一种2-RPU/UPS并联机构用于流水线上的码垛和搬运。米文博等[2]分析了一种用于药品包装生产线上的2-UPR/RSPR并联机构,具有2R2T运动模式,所以此机构中需要4个驱动确保该机构能够稳定的运行,通过D-H法求出支链的运动参数,并求出该并联机构的工作空间。
Muralidharan等[3]提出了一种并联机器人的设计方法,使并联机器人在给定安全工作区域内动态性能达到最优的尺寸设计。Peng等[4]设计了一组三自由度并联机构的运动学和定向能力,分析了Delta机构与等效的3-PRS并联机构的运动学特性,求出机构与输出参数的耦合关系,并非奇异性。贾竣臣等[5]设计了一种2T2R并联机构并且求出了其位置逆解和工作空间,用以代替人工操作,从而提高工作效率。Guo等[6]提出了一种基于螺旋理论的4-RRCR并联机构,证明了机构拥有正运动学简单,无平台奇异的优点。Sangveraphunsiri等[7]提出了一种基于H-4族并联机构的混合五自由度机械臂的设计,对运动学、逆运动学和动力学模型进行了数值分析。
目前用于分拣的并联机构大部分都具有工作空间较小。工作途径单一,只能实现极少数的工作点传送。其中使用最广泛的并联分拣机器人是Delta机器人[8-9],通过闭环平行四边形结构增加力臂,但由于拓扑机构使得整体结构较为复杂,驱动角受到的约束较大,由于只有三自由度,限制了其绕着水平线的转动,故在装配分拣时机构始终垂直于流水线。文中提出2-RPU/2-SPU并联机构则会实现单对多的工作点传输,极大地提高工作效率,并且此机构具有结构简单,受到的约束力少,机构斜置时也可以正常工作等优点,在物品分拣方面可以说是非常适用。
1 2-RPU/2-SPU并联机构构型以及坐标系的建立
2-RPU/2-SPU并联机构由1个静平台、1个动平台和4条支链(2条RPU支链和2条SPU支链)组成。支链中的R代表转动副,P代表移动副,U代表万向铰,S代表球面副。2条RPU支链的R副与静平台相连,U副与动平台相连,2条SPU支链的S副与静平台相连,U副与动平台相连。静平台和动平台均为正四边形,其边长分别为、。
建立固连于静平台的静坐标系bbb,其坐标原点位于静平台的几何中心,b轴通过14的中点,与转动副的轴线平行,b轴通过13的中点,b轴垂直于静平台竖直向上;建立固连于动平台上的动坐标系-aaa,其坐标原点位于动平台的几何中心,a轴通过14的中点,a轴通过13的中点,a轴垂直于动平台向外。
2 2-RPU/2-SPU并联机构的运动性能分析

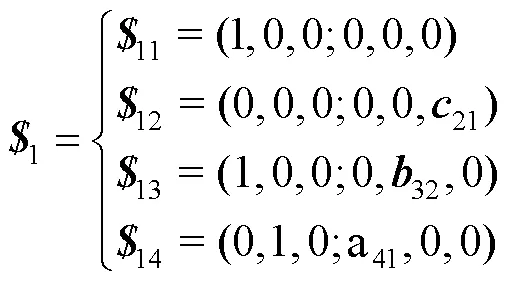


对杆33求反螺旋,可得:
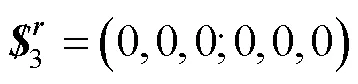

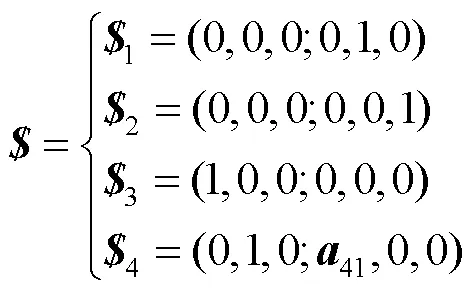
由此机构的运动螺旋可知此机构可沿a轴移动,沿a轴移动,沿a轴方向转动,沿a轴方 向转动。约束螺旋限制了沿a轴的移动和绕a轴的转动。
3 基于欧拉角转换和四元数法求2- RPU/2-SPU并联机构的运动逆解
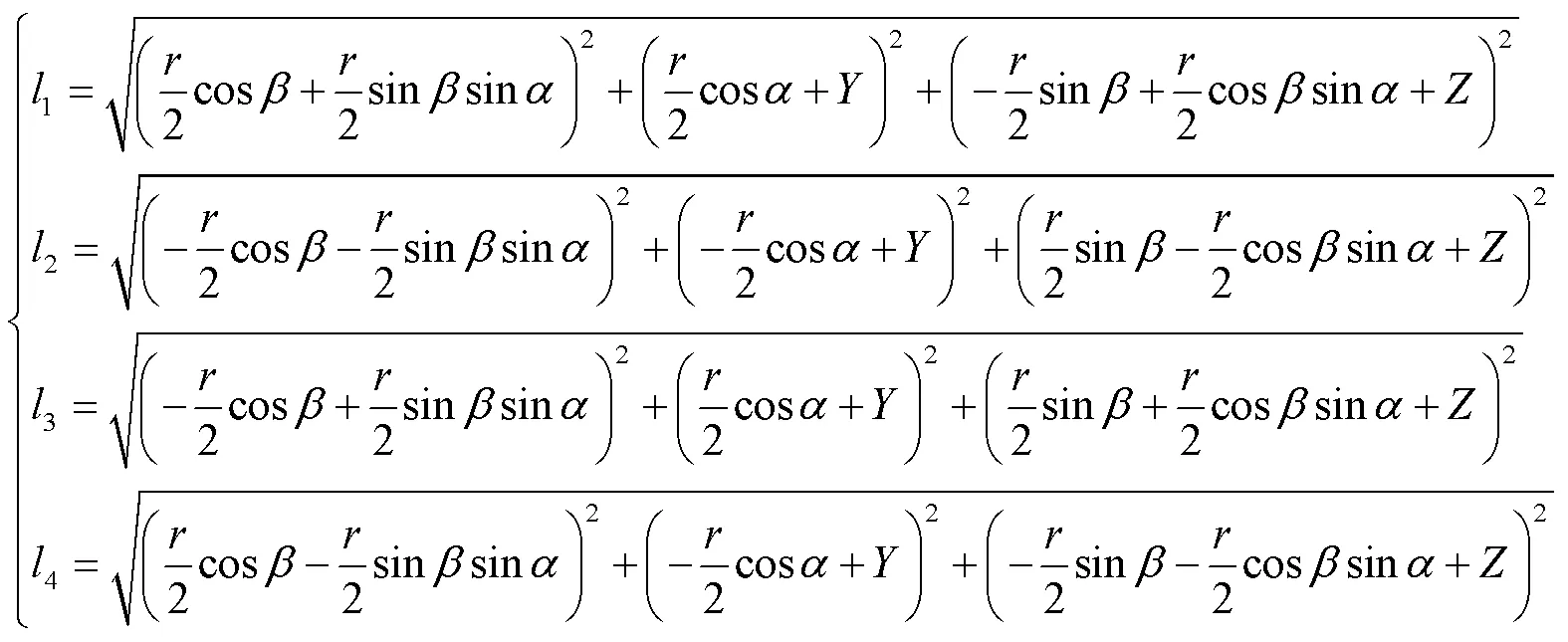
求并联机构的逆解就是根据动平台的位置和姿态来反求出各个驱动的运动参数[10-12]。常用的求逆解
方法有闭环矢量法和D-H法,当驱动加在R副上时使用D-H法,因本机构的4个驱动添加在P副上,故只需用闭环矢量法进行分析即可。
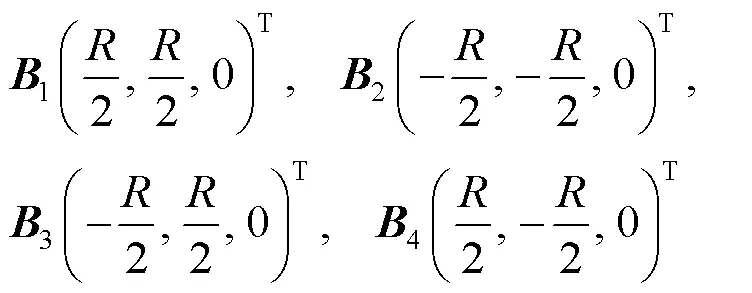
静平台上各点的坐标表示为:
动平台上各点的坐标表示为:

根据闭环矢量法求得各杆在静坐标系下的矢量表达式为:


设动平台参考点的位置矢量为:
通过变换公式求得动平台上的各点在静坐标系下的矢量为:
四元数法[14-15]在表达三维空间的旋转信息时,具有很好的解释作用,其表达式为:

在四元乘法运算中,运算关系为:
将并联机构转动的四元数转化为规范化四元数,即可变为式(15)所示的矩阵形式。

根据空间几何关系可知:
式中:的表达式为式(9)。
即可求出如下的对应关系:

4 2-RPU/2-SPU并联机构工作空间分析

可以发现,此机构的工作范围比较大,并且工作空间在各个坐标平面上的投影形状基本对称,而且工作空间连续,没有空洞,说明此机构能够在工作空间范围内平稳运行,无奇异性[16],运动性能良好。
5 2-RPU/2-SPU并联机构的运动学分析
建立2-RPU/2-SPU并联机构的虚拟样机模型,将建立好的SolidWorks模型转换格式,代入Adams软件中,设置其约束及驱动力,将驱动力施加到支链的4个移动副中,见图3。观察动平台质心运动参数的变化规律,见图4。
从图4可以看出,2-RPU/2-SPU并联机构动平台质心的位移、速度、加速度曲线变化较平稳,无断点,适用于自动分拣装置。
6 2-RPU/2-SPU自动分拣机构
由于快递物流线上的快递件大小不同,其在流水线上的摆放规律更是杂乱无章。针对适用的快递物流线上的分拣机,有精度、速度以及稳定性等方面的要求。通过对2-RPU/2-SPU并联机构进行分析,可观察其工作空间较大、控制较灵活、动态性偏差小。由于采用并联机构形式,此机构无累积偏差,并且并联机构刚度大、结构稳定、承载能力大。
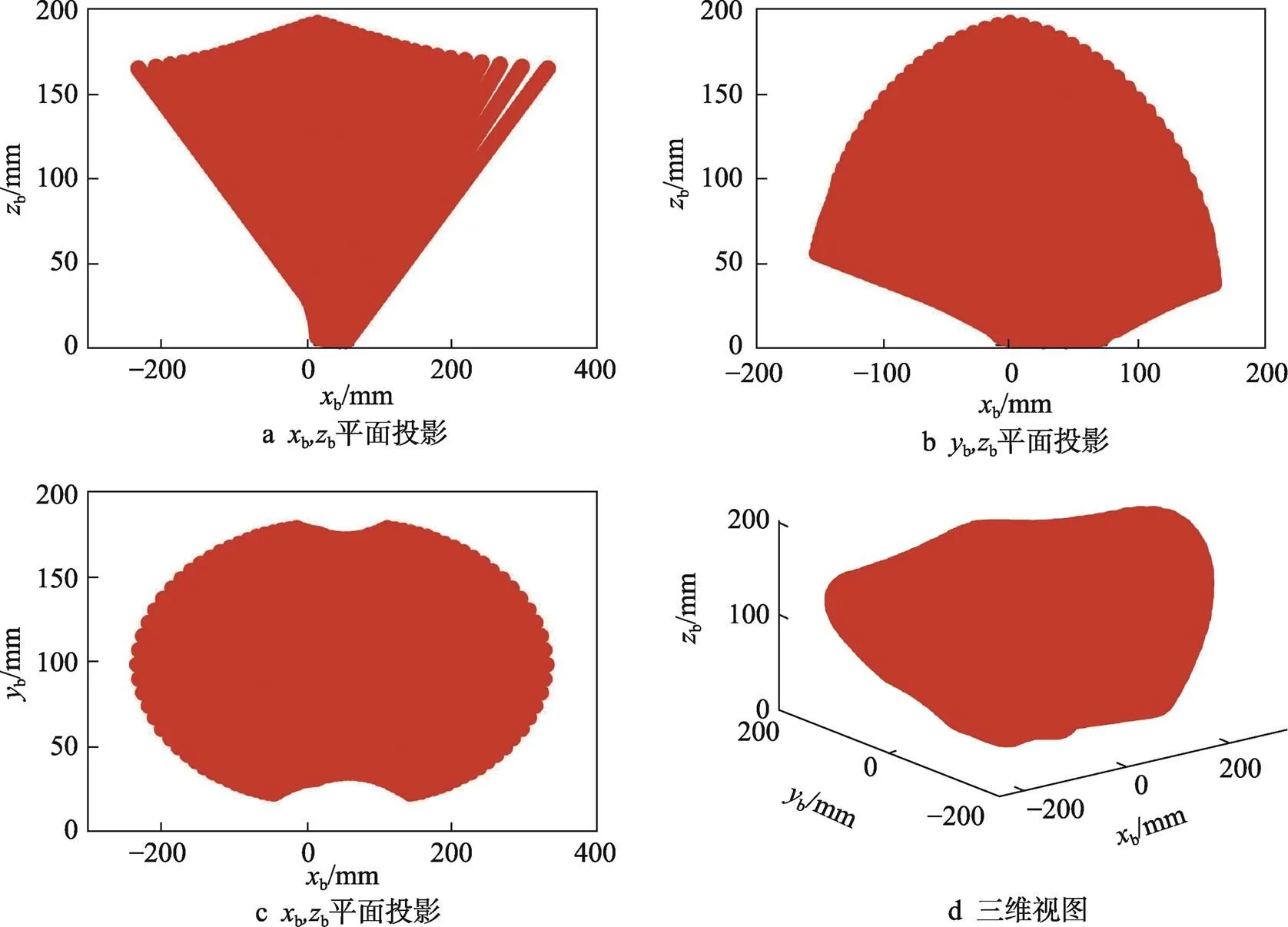
图2 2-RPU/2-SPU并联机构的可达工作空间

图3 2-RPU/2-SPU并联机构的虚拟样机
基于2-RPU/2-SPU并联机构的自动分拣装置,可配置于快递物流线上用于物品的分拣。将此机构与视觉传感技术相结合即可实现流水线上物品的分拣,可以实现精准度高、响应速度快的分拣,节约了人工成本。通过SolidWorks建模后,根据其不受a轴移动的约束力,将此机构配置在快递流水线上,接着对此机构进行仿真处理,仿真过程发现此机构能够将物品置于分拣箱内,见图5a。
鉴于此机构在水平面内沿a轴方向的投影较大,故可实现单机构对多条流水线上的同时分拣,见图5b。当分拣箱垂直于流水线时,只需要将机构斜置在流水线和分拣箱之间即可实现抓取与摆放的动作,见图5c。
2-RPU/2-SPU自动分拣机构与经典的Delta分拣机构相比,当Delta分拣机构与2-RPU/2-SPU分拣机构所给定的杆长参数相等时,位移变化曲线平稳且范围较大,速度可调节范围较大,因此,2-RPU/2-SPU自动分拣机构更适用于物流线货物较多,需要快速、精准分拣的情形。

图4 动平台质心参数

1.传送带;2.并联机构;3.机架;4.分拣集装箱;5.分拣货物;6.机械爪。
7 结语
2-RPU/2-SPU并联机构具有沿a轴移动,沿a轴移动,绕a轴转动,绕a轴转动4个自由度。利用闭环矢量法求得该机构的位置逆解及各支链间的相互约束关系。利用极限位置探索法求出该机构的工作空间,通过对工作空间的分析发现,工作空间基本呈现对称情况,空间性能良好。相较于传统的并联机构分拣机,此机构具有工作范围较大,驱动力容易添加等优点,只需要给各条支链移动副添加用移动驱动即可达到各个位置和姿态,实现了货物大批量的快速、精准分拣。
[1] 胡健, 宋胜涛, 李瑞琴, 等. 2-RPU/UPS并联机构自由度和位置分析[J]. 包装工程, 2021, 42(7): 214-219.
HU Jian, SONG Sheng-tao, LI Rui-qin, et al. Degree of Freedom and Position Analysis of 2-RPU/UPS Parallel Mechanism[J]. Packaging Engineering, 2021, 42(7): 214-219.
[2] 米文博, 马春生, 李瑞琴, 等. 应用于药品包装生产线的2-UPR/RSPR并联机构的工作空间分析[J]. 包装工程, 2021, 42(3): 171-176.
MI Wen-bo, MA Chun-sheng, LI Rui-qin, et al. Workspace Analysis of 2-UPR/RSPR Parallel Mechanism Applied to Pharmaceutical Packaging Production Line[J]. Packaging Engineering, 2021, 42(3): 171-176.
[3] MURALIDHARAN V, BOSE A, CHATRA K, et al. Methods for Dimensional Design of Parallel Manipulators for Optimal Dynamic Performance Over a Given Safe Working Zone[J]. Mechanism and Machine Theory, 2020, 147(C): 1-33.
[4] PENG Bin-bin, ZHU Shuai, KHAJEPOUR A, et al. Kinematics and Orientation Capability of a Family of 3-DOF Parallel Mechanisms[J]. Mechanism and Machine Theory, 2019, 142: 1-20.
[5] 贾竣臣, 薄瑞峰, 郭鑫鑫, 等. 一种2T2R并联机构的位置逆解和工作空间分析[J]. 机械传动, 2021, 45(6): 22-27.
JIA Jun-chen, BO Rui-feng, GUO Xin-xin, et al. Inverse Position Solution and Workspace Analysis of a 2T2R Parallel Mechanism[J]. Journal of Mechanical Transmission, 2021, 45(6): 22-27.
[6] GUO Sheng, WANG Cong-zhe, QU Hai-bo, et al. A Novel 4-RRCR Parallel Mechanism Based on Screw Theory and Its Kinematics Analysis[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2013, 227(9): 2039-2048.
[7] SANGVERAPHUNSIRI V, CHOOPRASIRD K. Dynamics and Control of a 5-DOF Manipulator Based on an H-4 Parallel Mechanism[J]. The International Journal of Advanced Manufacturing Technology, 2011, 52(1-4): 343-364.
[8] 李家宇, 沈惠平, 孟庆梅, 等. 一种Delta变形机构及其基于工作空间分析的尺度设计[J]. 机械设计, 2018, 35(7): 92-98.
LI Jia-yu, SHEN Hui-ping, MENG Qing-mei, et al. A Delta-Derived Mechanism and Its Scale Design Based on Working Space Analysis[J]. Journal of Machine Design, 2018, 35(7): 92-98.
[9] 乔文刚, 王磊, 秦天碧. 三自由度Delta机器人的奇异性分析及空间研究[J]. 机床与液压, 2018, 46(9): 61-64.
QIAO Wen-gang, WANG Lei, QIN Tian-bi. Singularity Analysis and Space Research of 3-DOF Delta Robot [J]. Machine Tool & Hydraulics, 2018, 46(9): 61-64.
[10] 石志新, 叶梅燕, 罗玉峰, 等. 3T1R并联机构结构设计与位置分析[J]. 农业机械学报, 2016, 47(8): 364-369.
SHI Zhi-xin, YE Mei-yan, LUO Yu-feng, et al. Structure Design and Displacement Analysis of 3T1R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(8): 364-369.
[11] OLARU A, OLARU S, NICULAE M. Proper Assisted Research Method Solving of the Robots Inverse Kinematics Problem[J]. Applied Mechanics and Materials, 2014, 555: 134-146.
[12] FANG Hai-rong, LIU Peng-fei, YANG Hui, et al. Design and Analysis of a Novel 2T2R Parallel Mechanism with the Closed-Loop Limbs[J]. International Journal of Automation and Computing, 2021, 18(4): 654-666.
[13] 黄真, 李艳文, 高峰. 空间运动构件姿态的欧拉角表示[J]. 燕山大学学报, 2002, 26(3): 189-192.
HUANG Zhen, LI Yan-wen, GAO Feng. The Expression of the Orientation of a Spatial Moving Unit by Euler Angle[J]. Journal of Yanshan University, 2002, 26(3): 189-192.
[14] 闫鑫, 马丽萍, 王晓华, 等. 基于倍四元数的缝纫机器人运动学分析[J]. 机械传动, 2020, 44(10): 68-73.
YAN Xin, MA Li-ping, WANG Xiao-hua, et al. Kinematics Analysis of Sewing Robot Based on Double Quaternion[J]. Journal of Mechanical Transmission, 2020, 44(10): 68-73.
[15] 赵德胜, 吴荣军, 张雪. 基于四元数的6-UPS机构奇异性分析[J]. 机械传动, 2015, 39(2): 72-76.
ZHAO De-sheng, WU Rong-jun, ZHANG Xue. Singularity Analysis of 6-UPS Mechanism Based on Quaternion[J]. Journal of Mechanical Transmission, 2015, 39(2): 72-76.
[16] REZAEI A, AKBARZADEH A. Study on Jacobian, Singularity and Kinematics Sensitivity of the FUM 3-PSP Parallel Manipulator[J]. Mechanism and Machine Theory, 2015, 86: 211-234.
Design of a 2-RPU/2-SPU Parallel Mechanism for Logistics and Express Sorting
FAN Wen-long, LI Rui-qin, WANG Chun-zhen, WANG Zhi-hao, LIU Jian-guo
(School of Mechanical Engineering, North University of China, Taiyuan 030051, China)
The work aims to propose a 2-RPU/2-SPU parallel mechanism to solve the problem of labor cost and improve the degree of automation on the logistics line, in view of the need for sorting and handling of a large number of express items. Firstly, the degree of freedom of 2-RPU/2-SPU mechanism was analyzed with screw theory to obtain the motion constraints of the mechanism. The position inverse solution of the mechanism and the mutual constraints between limbs were obtained with closed-loop vector method. Through inverse solution and constraint, the motion of the mechanism was simulated, and the reachable working range of the mechanism was obtained. The 2-RPU/2-SPU parallel mechanism had four degrees of freedom (2R2T), namely, two rotations alongaandarespectively and two translations alongaandarespectively, which made the mechanism more flexible and had a large range of workspace, and there was no singularity in the process of mechanism motion. The 2-RPU/2-SPU parallel mechanism has large working range. It can perform the sorting work on the logistics line. In addition, it can realize fast and accurate control in the sorting process. It has relatively flexible working process and good motion performance, among which the motion performance of 2R2T can better adapt to the sorting when the sorting mechanism is placed in an incline position.
2-RPU/2-SPU; parallel mechanism; inverse kinematics; workspace; logistics sorting
TB486; TH112
A
1001-3563(2022)07-0178-06
10.19554/j.cnki.1001-3563.2022.07.022
2021-08-03
山西省重点研发计划(201803D421028,201903D421051)
樊文龙(1997—),男,中北大学硕士生,主攻机构理论与机器人技术。
李瑞琴(1964—),女,中北大学教授,主要研究方向为机构理论与机器人技术。
责任编辑:曾钰婵
猜你喜欢
汉语世界(The World of Chinese)(2023年2期)2023-06-22 14:50:17
河北省科学院学报(2020年1期)2020-05-25 06:57:18
小学科学(学生版)(2020年2期)2020-03-03 13:40:16
制造技术与机床(2018年11期)2018-11-23 01:07:50
中国资源综合利用(2016年9期)2016-01-22 08:35:22
海军航空大学学报(2015年1期)2015-11-11 17:18:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38
机械制造与自动化(2014年1期)2014-03-01 04:22:01
