
基于BP神经网络PID机房温度控制研究
2022-04-12 04:24田紫锋
工业仪表与自动化装置 2022年2期
苏 杨,余 萱,卢 翔,田紫锋
(1.贵州电网有限责任公司信息中心,贵州 贵阳 550001) 2.贵州大学机械工程学院,贵州 贵阳 550025)
0 引言
近年来数据中心在国内的发展迅速,但是在数据中心的信息机房内的安全隐患存在很大的问题[1]。贵州电网信息中心机房采用的地板送风装置,由于机房内设备负荷量不同,最大温差可达到40 ℃,极易发生火灾,故地板的送风量要满足最大温度负荷机柜,最少房间冷负荷为750 W/m2,这样造成房间内温度分布不均,造成了极大的电力资源浪费。
以控制机房内温度均衡为出发点,使用一套适用于信息机房内机柜的智能降温系统-通风地板。在机房内设置统一的通风系统,在设备温度较高区域通风口向过热机柜进行通风散热。信息机房内是一个多变量的高度非线性系统,对于数学模型的精确建立存在一定的难度,对于传统的PID控制,对数学模型的精度需求尽可能的高。BP神经网络是智能控制研究的热点之一,神经网络具有任意非线性表达能力,可以通过对系统性能学习来实现对被控对象的精确控制[2-5],对信息机房的节能散热提供了有力的理论支撑。
1 机房温度控制系统
1.1 通风地板调节原理
机房是一个封闭系统,在不考虑外界热量、摩擦产生的热量时,对机柜中设备的温度进行监测。在机柜当中设置了三块温度传感器,用于采集机柜中上、中、下区域的温度数据,实时对机柜中设备的温度进行监测。当机柜中的设备工作产生热量并且达到可需调节时,通风地板通过采集到的温度数据进行相应的开度调节以达到通风降温效果,开度与温度传感器采集到的温度数据相关。地板结构如图1所示。

图1 开度可调通风地板正反实物图
对于通风地板的开度控制,采用西门子S7-1200PLC进行相应的控制,驱动力部分采用直流减速电机,通过在通风地板上的位移传感器对开度值进行监测,从而达到自动控制的原理。机柜中的温度传感器与PLC进行连接,当温度达到相应开度的值时,通过直流减速电机对地板的开度进行驱动,从而使得新风进入到房间中对机柜中的设备进行物理降温。
1.2 机房数学模型的建立
对于整个房间系统模型来说,系统内结构、气流影响、各个设备间的热量损失不均匀等影响,建立出精确的数学模型是十分困难的。由于温度控制具有时滞性,只能对其整个机房系统进行数学模型的建立。通过文献,以机房内空气为对象、机房内壁为对象、机房内设备为对象三个角度对数学模型进行建立,从而得到系统的数学模型微分方程组[6]。
在建立数学模型时,需对房间内作出相应假设:
①机房处于常温状态;
②忽略维护人员进入机房中带入的热量;
③忽略房间内部的隔热效果、机房内热容量保持不变、内外部的换热效果均匀等。
通过被控对象的热平衡方程进行分析:
(1)以机房内空气为对象
机房中热平衡方程式:
(1)
式中:tc为机房中的空气温度;Gc*为机房中空气的质量;Cp为机房中空气的定压热比;ΔQw为机房中房间墙壁传入或传出的热量Qw的增量;ΔQe为机房中设备所散发的热量Qe的增量;ΔQk为由通风孔通入风量温度的热量Qk的增量。
得到:
(2)
式中:ΔGk为通风的进气量的增量;tk 0为初始进气温度;θw为为内壁的温度与空气中温度的比值;αi-内壁与空气间的放热系数;αe为设备与空气间的换热系数;Fw为机房房间内壁的传热面积;Fe为传热面积。
从而由(1)式与(2)式整理得到新的微分方程式:
(3)
(2)以机房内壁为对象
得到机房中热平衡关系式:
(4)
式中:ΔQu为房间外部到内壁所附加的热量Qu的增量;Gw为房间内壁重质量;ΔQa为房间内部向外界散发的热量Qa的增量;tw为内壁温度。
随即可以得到式:
Qu=αu·(tb-tw)·Fw
(5)
式中:αu为换热系数;tb为空气附面层的恢复温度;
其中:
(6)
式中:Th=273+th;th为周围的大气温度;K为空气绝热指数,一般取1.4;M为飞行马赫数;ηr为附面层温度恢复速度,通风地板气流一般为湍流,ηr=0.893;
故而得到:
ΔQu=αu·tc 0·(θb-θw)·Fw
(7)
又得到房间内部向外界散发的热量Qa:
Qa=ε·σ·Tw
(8)
式中:ε为机房墙壁材料的辐射系数;σ为斯蒂芬-波尔茨曼常数,常取σ=4.96×10-8(m2·K4);
取增量并为无因次:
ΔQa=4ε·σ·Tw3·tc0·θw
(9)
故联立以上可以得到微分方程式:
(10)
(3)以机房中设备为对象
设机房中设备的散热均匀变化,则可以得到微分方程式:
(11)
式中:Ce为机房中设备的平均当量比热;Ge为平均重量。
(4)机房温度系统数学模型
(12)
式中:Ti为机房内温度时间常数;KC1为机房墙壁温度对于机房内空气温度影响的放大系数;KC2为设备温度对于机房内空气温度影响的放大系数;KC3为供气温度与供气量对于机房内空气温度影响的放大系数;P为微分算子。
2 控制器设计
BP神经网络PID控制器由传统的PID控制器与BP神经网络算法相结合,其特点是可进行在线学习,权值大小为其核心点,能够使PID控制器达到稳定效果[7-10]。其结构如图2所示。
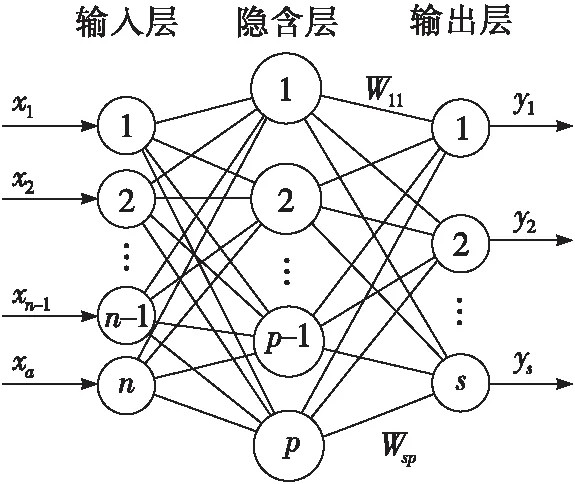
图2 BP神经网络结构
2.1 BP神经网络PID
BP神经网络是一种包含隐含层的三层前馈网络,具体包括输入层、隐含层、输出层[11-14]。BP神经网络PID控制器原理如图3所示:

图3 BP神经网络PID控制器
2.2 BP神经网络前馈计算
BP神经网络的输入、隐含、输出层分别对应了PID控制器的三个可调节参数Kp,Ki,Kd。由于这三个参数都不能为负,则输出的神经元层的变换函数取非负的Sigmoid函数,而隐含层的神经元变换函数可取正负对称的Sigmoid函数。
BP神经网络的输入(M为输入变量的个数):
(13)
隐含层的输入输出为:
(14)
输出层的输入输出:
(15)
则有:
(16)

(17)
同理可以得到隐含层的加权系数修正公式:

2.3 仿真模型搭建
在Simulink中搭建仿真模型,采用S函数编写BP神经网络PID控制器15。BP神经网络PID控制器中的输入层、隐含层、输出层分别为3,4,3;学习速率0.3、惯性系数设定为0.05,PID采样周期为0.01。如图4所示。

图4 综合控制系统
3 仿真结果对比分析
该系统中,设空气中的温度为23 ℃,对阶跃信号设定为23 ℃,响应时间为50 s,将BP神经网络PID与传统PID进行对比分析。如图5所示。
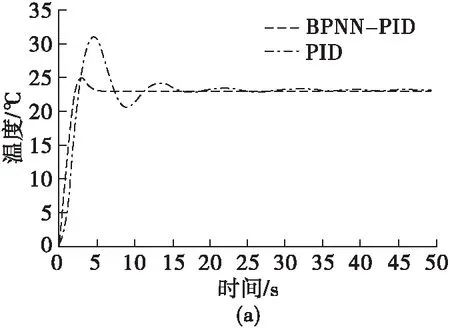

图5 仿真结果对比
其中图5(a)表示传统PID与添加了BP神经网络算法的PID控制系统对地板开度控制的效果图;随后图5(b)表示在35 s处添加一个5 ℃的温度干扰后对比两个控制器的变化效果。结果表明,BP神经网络PID控制器具有更快的相应,超调量更小,且无静差,对添加干扰后响应速度依然比PID控制器快,且更加稳定、超调量更小,展现了其良好的鲁棒性和稳定性。因此对机房内采用BP神经网络PID控制器。
4 实验验证
以贵州电网信息中心机房为实验对象,将通风地板安装到机房中,建立控制系统,机房采用内冷通道,送风速度为1.2 m/s,板孔处出风温度为20 ℃,机房非通风环境下温度为27 ℃,设定调节温度23 ℃,实验机房如图6所示。

图6 贵州电网信息中心机房
实验方式:机柜中安放RS-WS-N01-8型温湿度传感器,对机房的温湿度进行实时采集,采样数据设定为1 min/个,采样时间为85 h,共采集数据5100个。

图7 温度采集软件界面
设置地板开度为满足机柜温度载荷的平均温度,最大最小温度载荷分别为45 ℃及22 ℃,故设置固定开度为70%,继而进行温度数据采集;将地板固定开度实验数据和植入BP神经网络算法的PID控制器的数据进行对比。如图8所示为安装在机柜上的温湿度传感器。

图8 RS-WS-N01-8型温湿度传感器
如图9所示为机房中给与地板固定开度的温湿度三维-二维分布图[15]。结果显示,当只有70%固定开度的地板的送风区域与机房负载未能相应的互相适应,出现了温度过高的现象,这是因为固定开度为70%未能满足温度负荷过大的机柜,使得机房内温度温差达到29 ℃,房间内温度变化不均匀,这说明风力输送过于均匀,造成了大量的资源浪费。

图10 自动开度温湿度分布图
如图10所示,在对地板通过WINCC上位机软件将算法植入后,结果发现房间内温度整体处于相对平稳状态,随着时间的推移变化速度也相对稳定。即结果极大地验证了BP神经网络PID控制器的适用性,使得房间内温差缩小到12 ℃左右,达到预期节能效果。
5 结论
(1)根据计算流体力学搭建了房间数学模型,并利用BP神经网络PID代替传统PID方法建立控制手段,仿真的结果证明利用了BP神经网络PID控制器来说具有更好的稳定性与鲁棒性。
(2)将BP神经网络PID控制器运用到实际机房通风地板上,试验结果证明温度控制平稳,使得房间内温差从40 ℃缩小到12 ℃,房间整体达到平稳状态,节能效率得到提升,达到预期效果,具有较好的工程实践借鉴意义。
猜你喜欢
科技视界(2022年20期)2022-10-17
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
哈尔滨工业大学学报(2022年5期)2022-04-19
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
电子制作(2019年23期)2019-02-23
戏剧之家(2018年21期)2018-10-19
航天制造技术(2017年3期)2017-07-06
