
EasiLTOM:一种基于局部动态阈值的信号活动区间识别方法
2022-04-06 06:58周钧锴
计算机研究与发展 2022年4期
周钧锴 王 念 崔 莉
1(中国科学院计算技术研究所 北京 100190)
2(中国科学院大学 北京 100190)
(zjk934865517@163.com)
随着科技的发展,物联网对于社会的重要性日益增加,物联网的应用和技术挑战也不断拓展.其中基于含噪一维物联网时序信号的有效活动区间起止点识别问题受到了关注,例如基于加速度信号的运动区间识别、基于声音信号的语音识别和基于肌电等生理信号的临床运动信息采集等.但是在物联网实际应用中,原始采集信号数据中多含有大量的噪声,特别是在运动相关场景里,大量噪声的存在会干扰信号活动区间起止点的识别准确性.传统的人工标记方法[1]成本高且操作繁琐.为降低标记成本,有研究者提出了能够自动标记信号活动起止时间点的双阈值法[2],但是双阈值法对于信号中的噪声十分敏感,难以满足对多样化的数据集和数据段的差异化信号进行标记的需求.于是一些研究者提出了基于机器学习[3]或者深度学习[4]的活动区间识别方法.该类方法对原始信号进行特征提取并据此训练分类器来识别信号活动区间.但此类方法需要大量的训练样本数据,不适用于样本量较小的场景.因此,研究一种抗噪声干扰能力强且适合小样本的高效准确的信号活动区间识别方法具有重要意义,本工作拟针对此问题开展.
1 相关工作
基于一维时序信号的数据分析是物联网场景中最为常见的应用之一,例如基于表面肌电信号的手势识别[5]和基于肌电信号的步态识别[6]等.基于一维时序信号的物联网数据分析通常需要算法首先进行信号活动区间识别,之后方可基于区间的识别结果进行后续的算法研究[7].如果活动区间识别不精准,会导致后续分析无效等问题.例如在基于肌电信号的临床研究中[8],错误的运动识别区间会导致待分析数据中引入无关信号和噪声数据段的问题,从而影响数据的可用性以及分析特征的有效性.因此,面向一维时序信号的活动区间识别具有十分重要的研究意义.
目前已有的基于一维时序信号的信号活动区间识别研究有3种类型:
1) 人工标记法.在该方法中,研究者根据原始信号对信号中的各个信号活动区间的开始时间点和结束时间点进行手工标记.但手工标记方法会花费大量的人力和时间成本,而且标记结果会根据研究者的经验呈现出不同程度的主观误差.此类方法的人力和时间成本需要降低,同时信号活动区间的识别精度也需要进一步提升.
2) 双阈值法.为实现信号活动区间的自动标记从而达到降低人工和时间成本的目的,Wang等人[2]提出了DeepLap方法,该方法提出使用基于双阈值的信号活动区间识别方法进行活动区间识别.DeepLap利用高低2个阈值捕捉信号活动区间的开始时间点和结束时间点,低阈值对于信号的微小扰动十分敏感,因此可以用于捕捉细微的信号变化,达到提升信号活动区间起止点识别灵敏度和精度的目的.该方法还设置了信号高阈值,该高阈值用于再次确定信号活动区间的产生,从而有效减少短时噪声尖峰的误识别问题.该方法的具体过程为:设置1个低阈值和1个高阈值,并将信号与低阈值和高阈值做比较.低阈值和高阈值确定方法是基于整体输入信号的均值和方差进行计算的,低阈值和高阈值的计算分别为
(1)
(2)
其中,Nall为整体区间信号的采样点个数,xi为第i个采样点的信号值,k1,k2,k3,k4分别为不同的阈值确定系数.

Fig. 1 Recognition method of signal activity interval based on double threshold图1 基于双阈值的信号活动区间识别方法
当信号值高于低阈值时,将此时间点记录为时间点1.当信号值在始终不小于低阈值的情况下超越了高阈值时,算法将时间点1作为信号活动区间的开始时间点.当信号值低于低阈值时,算法将此时间点作为信号活动区间的结束时间点.DeepLap方法实现了信号活动区间的自动标记,降低了人工和时间成本.但DeepLap是基于固定阈值的,对于物联网数据集来说,不同运动时间段、不同运动属性的信号之间固定阈值的最佳取值差异较大,难以适用于不同的数据集和数据段,这降低了信号活动区间的识别精度.比如在含有大量噪声的信号中,算法需要使用较高的方差和均值乘数,否则会造成非噪声的误识别;而在含有少量噪声的信号中,算法需要用到较低的方差和均值乘数,否则会造成运动区间的忽略捕捉问题.如图1所示,由于信号中含有的噪声较多,噪声信号会提升整体信号的均值和方差.因此在双阈值法中,基于全局信号均值和信号方差所计算出的低阈值和高阈值均会大于最优低阈值和最优高阈值.因此无法准确识别出包含噪声和多种运动的一维时序信号中的起始点和终止点,造成了信号活动区间遗漏识别的问题.
3) 基于机器学习[3]或者深度学习[4]的活动区间识别方法.该类方法对原始信号进行特征提取并据此训练分类器来识别信号活动区间.比如Yamaba等人[9]使用支持向量机模型实现运动分类;Korpela等人[10]提出了一种结合Dynamic Time Warping和k-NN的运动识别分类模型;Nguyen等人[11]使用k-NN实现对不同行走类型的分类识别.基于传统机器学习的活动区间识别算法依赖于人工特征的提取,可能会造成原始信号的浪费.于是一些工作提出使用深度学习网络直接利用原始一维时序信号识别运动区间,比如Quivira等人[12]使用LSTM利用肌电信号识别手指运动;Lee等人[13]通过构建一维的CNN实现了运动的分类识别.基于深度学习的方法虽然提升了识别的精度,但它们需要大量的训练样本数据,而某些物联网场景数据量较小,使用该类方法通常会导致模型欠拟合,从而降低模型的泛化能力.
为了解决上述问题,本研究提出了EasiLTOM:一种基于局部动态阈值的信号活动区间识别方法.该方法的特点是通过利用局部一维信号的均值和方差对不同段信号区域的动态双阈值进行计算,并使用最短信号长度对噪声尖峰进行过滤,从而使算法能够适用于不同的信号环境,并且避免了局部噪声信号对识别阈值的影响,减少了信号特点在不同运动和不同噪声中存在差异所导致的信号活动区间误识别问题.此外,EasiLTOM方法可适用于数据量较小的物联网场景.
2 基于局部动态阈值的信号区间识别方法原理
在物联网场景中,传感器可根据自身传感特征对环境数据进行感知.所感知的数据可描述为S=Ssignal+Snoise,其中Ssignal为目标信号,Snoise为噪声.在不同的物联网数据场景中,噪声的种类和幅值会有所差异.算法需要基于原始信号识别出信号中的活动区间的起始点和终止点.
虽然不同场景中的信号属性存在较大差异,但是活动信号区间的起始点和终止点都具有一些共同的特点,算法可以基于此进行高精度的信号活动区间的识别.在一维信号的活动区间识别场景中,活动信号区间起始点的特点是,自该时间点起,信号开始持续活跃,并在较高的幅值维持一段时间.活动信号区间终止点的特点是,自该时间点起,信号开始静息,信号的幅值较小.
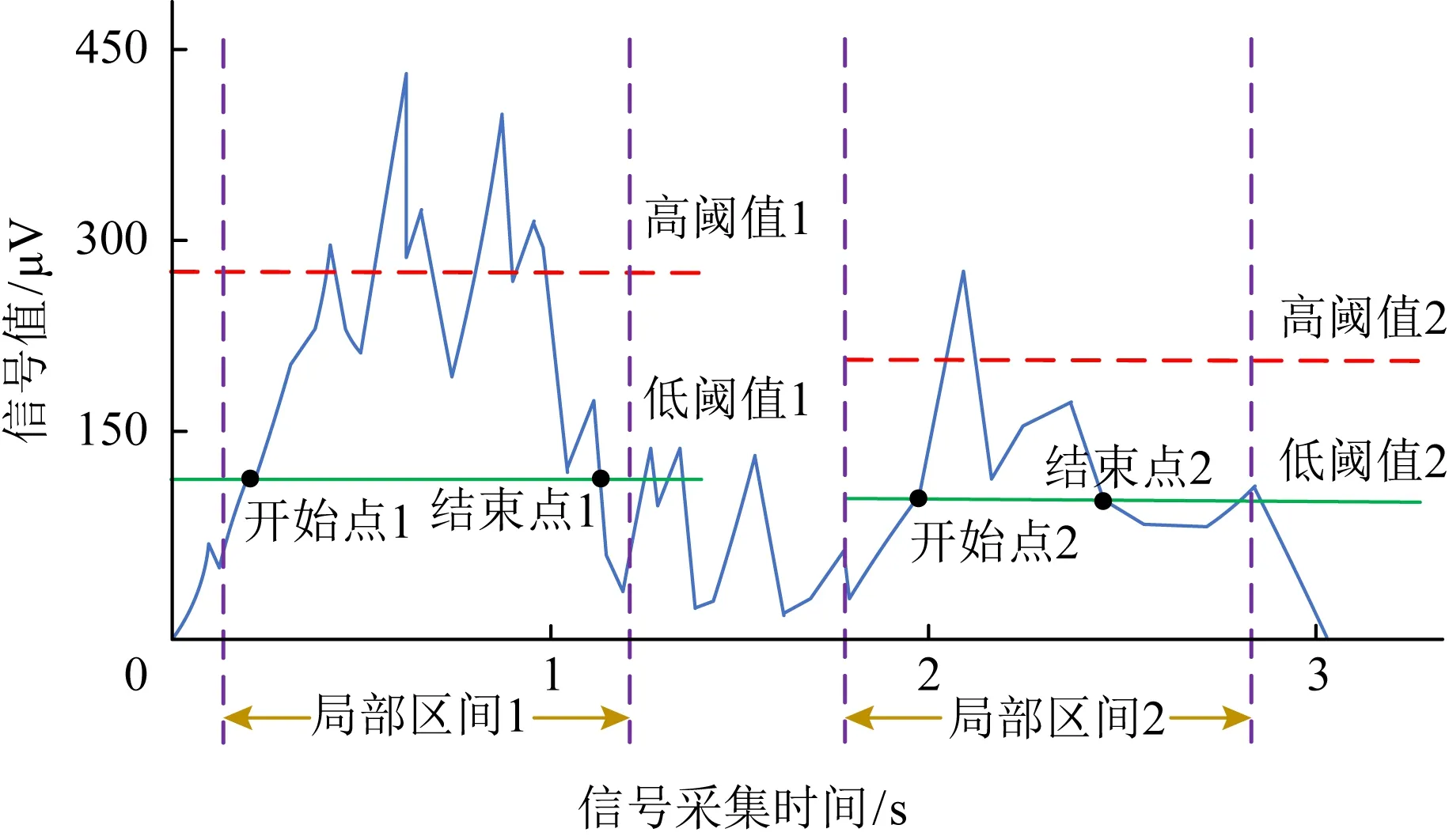
Fig. 2 Recognition method of signal activity interval based on local dynamic threshold EasiLTOM图2 基于局部动态阈值的信号活动区间识别方法EasiLTOM示意图
考虑到活动信号区间起止点的特点,本文提出了EasiLTOM方法,其中局部是指长度为时间窗口T的信号区间.EasiLTOM方法通过设置基于时间窗口T计算出的低阈值和高阈值对信号进行状态划分,再通过对信号状态的判断确定信号活动区间的起止点.其中低阈值和高阈值是基于时间窗口T内的信号值的平均值和方差计算的,当时间窗口T过小时,算法难以利用信号中全部的有效信息,从而导致部分有效信号信息被浪费;当时间窗口过大时,算法会引入更多的信号噪声,导致识别阈值的适用性降低.所以EasiLTOM方法需要根据不同的信号类型设置合适的时间窗口T.此外,EasiLTOM方法加入了最短信号长度tmin对噪声尖峰进行过滤.由于EasiLTOM方法中的低阈值和高阈值是使用时间窗口为T的局部区域信号平均值和方差进行确定的,从而能够避免噪声信号对识别阈值的影响,并提升信号活动区间的识别精度,EasiLTOM方法示意图如图2所示.在图2中,EasiLTOM使用第1个局部信号区间的信号平均值和方差计算出低阈值1和高阈值1用于第1个信号区间的起止点(在图2中即为开始点1和结束点1)识别;EasiLTOM再使用第2个局部信号区间的信号平均值和方差计算出低阈值2和高阈值2用于第2个信号区间的起止点(在图2中即为开始点2和结束点2)识别.下面本文将对信号活动区间的起始点和终止点的识别方法进行介绍.
2.1 信号活动区间的起始点和终止点识别方法
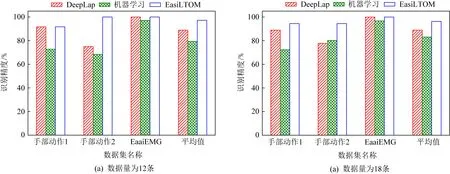
为识别信号活动区间的起止点,本方法提出使用信号低阈值和信号高阈值共同用于信号活动区间的起始点和终止点识别.当信号值高于信号低阈值,视为信号开始波动,方法进入状态1,并将此时间点记录为t1.当信号在始终不低于低阈值的情况下高于信号高阈值时,方法进入状态2,当信号值低于低阈值时,方法将此时间点记录为t2,此时方法判断t2与t1的差值Δt是否大于最短信号长度tmin.如果Δt≥tmin,方法此时可以确认t1为信号活动区间的起始点,t2为信号活动区间的终止点;如果Δt 为充分利用当前信号区间的信号特点,并避免噪声的影响,基于局部动态阈值的信号活动区间识别方法使用局部信号的均值和方差对低阈值和高阈值进行计算.由于信号时域特征中的均值和方差能够较好地反映出不同运动信号的特点,所以基于局部信号的均值和方差对用于运动识别的低阈值和高阈值进行计算.方法根据此窗口中的信号均值及方差分别对低阈值和高阈值进行计算,低阈值的计算为 (3) 其中,Nlocal为局部区间信号的采样点个数,xi为第i个采样点的信号值,k5和k6分别为不同的低阈值确定系数. 高阈值的计算为 (4) 其中,Nlocal为局部区间信号的采样点个数,xi为第i个采样点的信号值,k7和k8分别为不同的高阈值确定系数. 本文设计了EasiLTOM的算法流程,如算法1所示: 算法1.EasiLTOM算法. 输入:signal,T,tmin; 输出:开始时间点、结束时间点. ① 算法初始化为状态0; ② 基于时间窗口T使用局部平均信号值和局部信号方差值计算低阈值和高阈值; ③ if信号值高于低阈值 ④ 算法进入状态1,记录时间点t1; ⑤ if信号值在不低于低阈值的情况下高于高阈值 ⑥ 算法进入状态2; ⑦ if信号值低于低阈值 ⑧ 算法记录时间点t2; ⑨ end if ⑩ end if 算法1可以对信号活动区间的起始时间点和终止时间点进行识别,其流程如图3所示.下面结合流程图对算法1进行阐述.算法首先初始化为0状态,然后算法基于时间窗口T使用局部信号区间的平均值和方差计算低阈值和高阈值.之后算法判断信号值高于低阈值的时间点,当信号值高于低阈值时,算法进入状态1,并将此时间点标记为t1.如果信号值在始终不低于低阈值的情况下高于高阈值,算法进入状态2,当信号值低于低阈值时,算法将此时间点记录为t2,此时算法判断时间点t2与时间点t1的差值Δt是否大于最短信号长度tmin,如果Δt≥tmin,算法分别将t1和t2作为信号活动区间的起始点和终止点进行输出,最后算法恢复0状态. Fig. 3 Flow of signal interval recognition algorithm based on local dynamic threshold图3 基于局部动态阈值的信号区间识别算法流程图 为验证本文提出的EasiLTOM方法的准确性,本节将EasiLTOM方法与DeepLap方法,以及基于机器学习的信号活动区间识别方法进行对比实验.实验内容包括方法的识别准确性验证,方法在小数据量场景中的识别精度对比.实验数据包括本研究实际部署采集的肌电数据集EasiEMG及2个UCI公开数据集中的部分数据. 为验证本方法的有效性,本节首先对本文所选用的实际数据集的采集情况(3.1.1节)以及选择的公开数据集(3.1.2节)的情况进行介绍.之后本节总结和对比EasiLTOM方法、DeepLap方法以及基于机器学习的信号活动区间识别方法在多个场景中的识别精度. 3.1.1 肌电数据集采集情况 Fig. 4 Schematic diagram of EMG test exercise图4 肌电测试运动示意图 肌电信号是一种人体生理信号,它记录了肌肉细胞产生的收缩力[14].表面肌电信号是浅层肌肉肌电信号和神经干上电活动在皮肤表面的综合效应,能在一定程度上反映神经肌肉的活动;表面肌电信号在测量上具有无创伤等优点,并且可以作为肌肉疼痛疾病诊断的有效依据[15],所以广泛应用于康复医学等领域.但肌肉疼痛疾病的诊断依赖于表面肌电信号的运动区间识别.为验证EasiLTOM方法的有效性,本研究组在2017-09—2017-11期间于中国中医科学院西苑医院实际部署了一套肌电信号采集装置,对非特异性腰痛患者和正常人的肌电信号进行采集.在采集期间,该系统共采集到14位受试者的肌电信号,构成肌电信号数据集EasiEMG.每次采集时,受试者执行3次屈曲放松运动(如图4(a)所示)、1次左足桥式运动(如图4(b)所示)、1次右足桥式运动(如图4(c)所示)、1次双足桥式运动(如图4(d)所示)和1次Biering Sorensen等长运动(如图4(e)所示).在肌电信号的采集过程中,各种运动的肌电信号按时间顺序串行拼接,每2种运动之间存在无序运动,无序运动的肌电信号会作为噪声存在于整体肌电信号中. 3.1.2 公开数据集情况 本文选择了UCI公开数据集中的2个手部动作肌电信号测试数据集手部动作集1(sEMG for basic hand movements data set database 1, Hand move-ments 1)[16]和手部动作集2(sEMG for basic hand movements data set database 2, Hand movements 2)[17],每个测试数据集中含有6个手部动作的多次肌电信号测试.分别选择手部动作集1中的1名男性受试者的180次肌电测试信号和手部动作集2中的1名男性受试者的600次肌电测试信号进行信号活动区间的识别,肌电信号中存在无序手部运动的肌电信号作为噪声. 3.2.1 识别精度验证 Fig. 5 Recognition accuracy of EasiLTOM, DeepLap and machine learning methods图5 EasiLTOM,DeepLap及机器学习方法的识别精度 为验证EasiLTOM方法的有效性及识别精度,本节分别使用EasiLTOM,DeepLap以及机器学习方法对数据集EasiEMG和2个UCI公开数据集中数据进行了信号活动区间的识别,其中识别精度与误检率和漏检率的关系为 Pacc=1-Pfalse-Pmissed, (5) 其中,Pacc为识别精度,Pfalse为误检率,Pmissed为漏检率.由于随机森林模型[18]对于噪声的稳定性好,分类精度高,且具有较强的泛化能力,适用于信号活动区间的起止点识别问题,所以本文选择随机森林模型作为机器学习方法以识别信号活动区间的起止点,EasiLTOM,DeepLap及机器学习方法对于各数据集的识别精度结果如表1所示: Table 1 EasiLTOM, DeepLap and Machine Learning Recognition Accuracy Results for Each Data Set 实验结果表明:EasiLTOM方法对于信号活动区间的识别精度超过了DeepLap方法以及基于机器学习的信号活动区间识别方法,达到了平均93.17%的识别精度,EasiLTOM方法的识别精度比双阈值法的识别精度高15.03%,比基于机器学习的信号活动区间识别方法的识别精度高4.70%. 3.2.2 小数据量场景中的识别精度对比 许多物联网场景中的数据量稀少,因此需要一种适用于小数量场景的信号活动区间识别方法.为验证EasiLTOM,DeepLap及机器学习方法在小数据量场景中的识别精度,本文使用EasiLTOM,DeepLap及机器学习方法对各个数据集分别在数据量为12条和18条的场景下进行了信号活动区间的识别,识别精度结果如图5所示. 通过实验结果可以得到,当数据量为12条和18条时,机器学习方法对于各个数据的平均识别精度分别为79.44%和83.12%,EasiLTOM方法对于各个数据的平均识别精度分别为97.22%和96.29%,EasiLTOM方法的识别精度分别比机器学习方法高17.78%和13.17%. 通过实验在小数据量场景中的识别精度结果对比可得,在数据量稀少的物联网场景中,机器学习方法因为模型欠拟合,导致模型的泛化能力变差,从而使识别精度下降.而EasiLTOM方法因为识别阈值的适用性在数据量稀少的场景中相较于在数据量大的场景中更好,从而提升了信号活动区间的识别精度.所以,EasiLTOM方法仅需使用少量数据即可对信号活动区间进行准确地识别,十分适用于数据量稀少的物联网数据场景. 本文提出了基于局部动态阈值信号活动区间识别方法EasiLTOM,EasiLTOM方法的特点是:可以有效地克服将噪声信号误检为信号活动区间或信号活动区间漏检的现象,而且避免了信号中的随机噪声对于信号属性不同的区间识别所带来的影响,从而提升了信号活动区间的识别准确率.此外,EasiLTOM方法仅需使用少量数据即可对信号活动区间进行准确的识别,十分适用于数据量较小的物联网数据场景. 相对于现有的信号活动区间识别方法DeepLap来说,EasiLTOM由于使用了局部动态阈值机制,所以方法对噪声的容忍度高,能够适用于更广泛的信号活动区间识别的物联网场景.例如在3.2节中,EasiLTOM方法对于信号活动区间的识别精度超过了其他方法,达到了平均93.17%的识别精度,比双阈值法的识别精度高15.03%,比基于机器学习的信号活动区间识别方法的识别精度高4.70%. EasiLTOM适用于含有噪声的一维物联网场景,因为在确定识别低阈值和高阈值时,方法综合使用了信号的局部区间的信号均值和信号方差,充分利用了当前信号区间的信号特点,避免了信号中其他段信号的噪声影响,并且加入了最短信号长度对噪声尖峰进行过滤,从而使得信号中的噪声不会对方法的适用性产生影响.例如在EasiEMG数据集中,肌电信号数据中含有因无序运动造成的噪声.针对此类信号,在本文3.2节的结果中可以看到本方法的信号活动区间识别精度最优.针对UCI公开数据集中的噪声,在本文3.2节中可以看到本方法的信号活动区间识别精度最优. EasiLTOM方法适用于数据量稀少的物联网数据集中,对于小数量场景,EasiLTOM方法因为识别阈值的适用性在数据量稀少的场景中相较于在数据量大的场景中更好,所以提升了信号活动区间的识别精度,而机器学习方法因为在小数据量场景中模型欠拟合导致识别精度下降.比如在3.2节中,数据量为12条和18条时,EasiLTOM方法的平均识别精度分别比机器学习方法高17.78%和13.17%. 本文针对含有大量噪声的一维时序信号难以确定活动区间的开始和结束时间点的问题,提出了一种基于局部动态阈值的信号活动区间识别方法EasiLTOM.相对于单阈值和双阈值的信号活动区间识别方法,EasiLTOM有效地避免了信号中的随机噪声对于信号属性不同的区间识别所带来的影响,解决了信号活动区间的漏检和误检问题,从而提高了信号活动区间的识别精度.相对于机器学习方法,EasiLTOM方法具有识别精确度高、所需数据量少等优点,使其更加适用于数据量稀少的物联网场景.通过对比实验证明,EasiLTOM方法达到了平均93.17%的识别精度,EasiLTOM方法的识别精度比双阈值法的识别精度高15.03%,比基于机器学习的信号活动区间识别方法的识别精度高4.70%,达到了目前最佳的运动区间识别精度.EasiLTOM方法适用于含有大量噪声的一维时序信号活动区间识别场景. 作者贡献声明:周钧锴负责论文的写作及实验;王念负责论文的修改及实验;崔莉负责整体指导及论文的修改.2.2 EasiLTOM流程及描述

3 实验分析
3.1 实验设计

3.2 实验结果

4 讨 论
5 结 论
猜你喜欢
电脑报(2022年24期)2022-07-01
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
科技研究(2021年15期)2021-09-10
舰船科学技术(2021年12期)2021-03-29
电脑爱好者(2020年19期)2020-10-20
软件导刊(2018年3期)2018-03-26
分析化学(2017年12期)2017-12-25
饮食科学(2016年7期)2016-07-27
科技与创新(2014年11期)2014-08-21
