一种SURF-FREAK特征误差模型视觉里程计
2022-04-02 05:26柴宏旭
计算机技术与发展 2022年3期
刘 军,柴宏旭,赵 威
(兰州理工大学 机械电子工程学院,甘肃 兰州 730050)
0 引 言
近年来,随着自动化水平的提高,智能机器人已经成为生产生活中的一部分,如扫地机器人、无人机等。无人设备在未知环境下执行任务可通过自身携带的传感器获取环境信息从而完成构建导航地图、路径规划等相关任务。而视觉传感器不仅能获得丰富的图像信息,且具有质量轻、价格低、体积小等优势,在机器人导航方面得到了广泛应用。
视觉里程计(visual odometry,VO)是智能机器人同步定位与地图构建(simultaneous localization and mapping,SLAM)的关键技术之一[1-2],可实现移动机器人在未知环境下的自主定位,为环境地图模型的建立与机器人导航提供位置信息。该技术起源于二十世纪八十年代,自2004年David Nister发表了一篇以视觉里程计为标题的论文[3],并于同年成功应用于美国国家航空航天局(NASA)主导的火星漫游者勇气号和机遇号上后,掀起了新一轮的研究高潮。经过众多学者的努力,当前其主流技术主要发展为三大类:直接法[4-5]、特征点法[6-7]、半直接法[8]。较典型且已开源的A.J.Davison所提MonoSLAM方案的视觉里程计技术[5]即属于直接法,其技术特点是直接通过计算像素灰度值的差异来确定相机运动。但直接法在过程中非常容易丢失特征点从而导致相机定位失败。特征点法主要基于特征点进行图像匹配,相比于直接法更稳定。较典型的如2015年Raul Mur-Artal所提出的ORB-SLAM[7],以ORB特征点贯穿于系统的特征处理、匹配、回环检测等方面,在全局优化基础之上可以获得较准确、全局一致的相机运动轨迹。半直接法将特征点法和直接法相结合,在关键帧中提取特征点,但在普通帧上通过计算灰度值差异进行特征跟踪,如文献[8]等。该技术虽具有较快的单帧处理速率以及良好的实时性,但在定位精度以及鲁棒性上存在不足之处。
上述视觉里程计方案主要基于2D图像模型,因此容易受到环境因素的影响,如相机旋转、图像模糊、弱纹理区域等等,易导致定位失败,因而难以处理复杂环境或难以满足复杂任务要求场景的建模要求。而深度相机近年来得到了广泛关注与应用[9],其除图像信息之外也提供深度信息,可较好地弥补和解决上述问题[10]。目前基于深度相机的视觉里程计有两种技术模型:一种为3D-2D点位姿求解,如PnP(perspective-n-point)模型,通过已知三维空间点和图像中所对应投影点的位置关系来估计相机位姿;另一种为3D-3D点云位姿求解,即通过在不同坐标系下观测到的同一三维空间点集信息来估计相机位姿,例如Besl、Mckay等人[11]提出的迭代最近点算法等,其算法是基于四元数来定义相机位置,从测量点确定其对应就近点的点集后,通过构建代价函数(cost function)进行迭代计算,直至达到允许误差从而结束迭代过程。因此,为提高处理效率,许多学者结合深度相机的特点提出了诸多改进算法,例如,Siemiatkowska等人在2D图像上提取特征点进行粗配准,然后将粗配准得到的变换矩阵作为精配准的初始值,通过改进算法初始值的方式减小迭代次数以提高效率[12]。Ji H等人提出了一种ColorICP算法,利用三维点的颜色信息,在寻找最近点的时候,只在颜色相近的区域寻找最近点作为匹配点,可有效减少计算量,提高匹配效率[13]。其他围绕提高计算效率方面的努力如文献[14-16]等,但上述改进要么效率提升有限,要么往往都以牺牲精度为代价,存在不同的技术缺陷,如光照变化影响大、空间旋转尺度难以保证等等,很难兼顾精度与效率,在此不再一一赘述。
基于此,为兼顾精度与效率,受文献[17]启发,该文提出了一种新的视觉里程计技术。该技术将SURF特征点提取方式与FREAK描述子相结合,在粗配准确定特征点时,为保证精度,采纳SURF特征点提取方式以保持空间尺度不变性,同时采用FREAK描述子,即以先行检查前128位描述信息而非对全部描述信息进行检查的方式提高检查效率。同时在精配准时,在概率与统计学意义下,不同于传统采纳欧氏距离对特征点距离进行度量的方式,而是结合实际情况将所有特征点的位置误差也引入到距离函数中,即提出了一种欧氏、马氏距离相混合的距离函数对特征点距离进行度量,该种方式更符合实际情况,既有效度量了特征点的概率位置,也考虑了其位置方差的影响;并且,为进一步增强特征点空间位置准确性与降低视觉里程计累计误差,在精匹配后采用卡尔曼滤波对特征点空间位置进行更新,以提高特征点位置与相机位姿精度。尤其不同于传统视觉里程计技术仅给出相机概率位置期望,该文在上述改进的基础上,给出了相机位置的方差计算公式。标准数据集测试实验表明,该技术能有效兼顾实时性和准确性,并能较好地对相机运动轨迹进行估计。
1 视觉里程计问题描述
视觉里程计是通过视觉方式还原出相机运动轨迹。该文在考虑视觉深度信息误差的基础之上,提出了一种新型视觉里程计技术,以解决当前基于深度相机的视觉里程计技术在小型自主移动设备上使用时的精度与效率协调问题。通过对相机采集到的图像进行处理,计算出相机每一时刻运动位姿,即公式(1),从而构建出相机运动轨迹。
令世界坐标系(用上标w表示)是一个固定的参照坐标用来描述相机和物体的位置;相机坐标系(用上标c表示)是相机视角下建立的坐标系;像素坐标(u,v)是在相机采集的图像上建立的二维坐标。相机初始位姿坐标定义为世界坐标,相机坐标后续不断变化。相机间后续位姿变化用一个4×4的变换矩阵表示:
(1)
每一时刻在不同位姿处,空间特征点与相机特征点的转换关系通过公式(2)呈现。设相机坐标系下的特征点为PC,采集图像投影点为p,像素坐标记为ui,此坐标可由变换矩阵T转换到世界坐标系下:
(2)
2 一种融合SURF-FREAK特征点误差模型视觉里程计技术
传统的视觉里程计建立图像噪声扰动模型,但未考虑Kinetic相机采集深度数据时存在噪声,会导致深度值d存在误差,对位姿估计的准确性有较大的影响,甚至会导致机器定位失败。因此,受文献[17]启发,该文在其基础上采取高斯误差模型描述Kinect深度值的误差;并且为了快速获得准确的相机位姿,先行通过图像配准环节进行粗配准,为后续精配准环节提供初始值,减少精配准目标函数迭代次数,提高效率。
2.1 基于SURF-FREAK图像特征匹配
在粗配准环节,该文结合SURF特征点提取方式和FREAK描述信息的优势,提高特征点准确性和效率。相较于传统的FAST提取方式,因通过不同尺度的盒式滤波(box filter,BF)与图像卷积构建出多尺度空间,在图像中稳定的特征点进行检测筛选;并且SURF特征点描述子在匹配时计算量大,结合FREAK描述子通过二进制描述符,以先行匹配128位描述信息而非对全部描述信息进行检查的方式提高检查效率。
2.1.1 SURF特征提取
SURF特征检测是通过计算Hessian矩阵行列式,以局部曲率极大值来检测特征点的区域,并通过盒式滤波(box filter)构建多尺度空间,对特征点和原始图像做卷积,进行不同尺度空间的极值检测,从而生成图像稳定的边缘点(突变点),用于特征点提取,使其具备多尺度不变性。经过Hessian矩阵处理的每个像素点与其图像域和尺度域的所有相邻点进行比较寻找极值点,再通过盒式滤波器构建多尺度空间,滤除掉不具备多尺度不变性的极值点,筛选出最终稳定的特征点。传统SURF特征点在匹配时,建立特征点主方向,通过在特征点周围选取一个正方形框,框的边长为20倍特征点像素大小。然后将该框平分为16个子区域,在每个子区域计算25个像素的水平方向和垂直方向的haar小波特征,并对水平方向和垂直方向计算绝对值之和,构造描述向量。以此作为图像特征区域描述信息,对图像进行匹配。
SURF特征点匹配如图1所示。
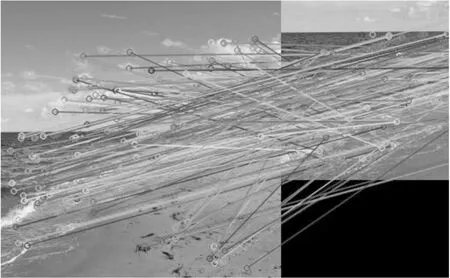
图1 SURF特征点匹配
SURF特征点可以通过提高阈值来提高匹配准确性,但SURF特征需要计算每个尺寸的haar小波响应,计算量较大;此外图像配准时,通过计算特征点周围描述向量间的欧氏距离,确定特征点匹配度。SURF特征点描述子虽然精度高,但存在计算量大、效率低等问题。基于此,该文通过FREAK二进制描述代替SURF特征描述的方式来提高效率。
2.1.2 FREAK描述子及匹配
图像通过SURF完成特征提取,通过二进制描述符FREAK描述子代替SURF描述子,以降低计算量,提高效率。相较于SURF特征描述子,一方面通过二进制编码来代替haar小波响应,以提高运算速度;另一方面FREAK描述子模拟人眼,根据采样点与特征点的距离远近,采用了不同大小的高斯核函数进行平滑处理,通过重叠的感受野,可以获得更多的信息,使最终的描述符更具独特性和可辨识性。
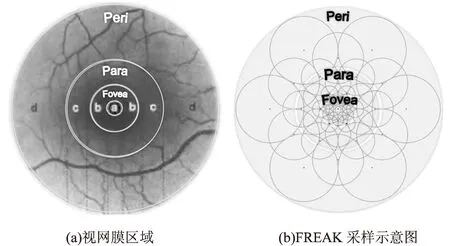
图2 FREAK描述子
FREAK描述子[18]是通过模拟人眼视网膜对特征点周围的图像信息进行处理。如图2(a)所示,人眼的视网膜根据感光细胞的密度分成了三个区域,即中央凹(fovea)、旁中央凹(parafoveal)、周边区(perifoveal)。fovea区域感光细胞密度大,能够获得较高的分辨率,主要用于细节识别;perifoveal区域感光细胞密度较少可获得低分辨率的图像,可用于轮廓识别。FREAK描述子就是借鉴了人类视觉分区获取信息而提出的一种算法,FREAK描述子采样像素分布在多个同心圆,采样像素的分布是按照指数形式的分布密度分布的,越接近同心圆的分布密度越大,如图2(b)所示。
二进制编码FREAK特征描述算法,编码过程见公式(3):
(3)
最终,根据计算得到了512 bit的二进制描述符,该描述符的列是方差由高到低的排列,而高方差表征了模糊信息,低方差表征了细节信息。因此,选取前128 bit即16 bytes进行匹配,若两个待匹配的特征点前16 bytes距离小于设定的阈值,则再用剩余的比特位进行匹配。第一步匹配可以剔除掉90%的不相关匹配点,很大程度上提高了匹配的速度。通过融合SURF-FREAK特征提取描述算法,对室内区域进行环境匹配,如图3所示。
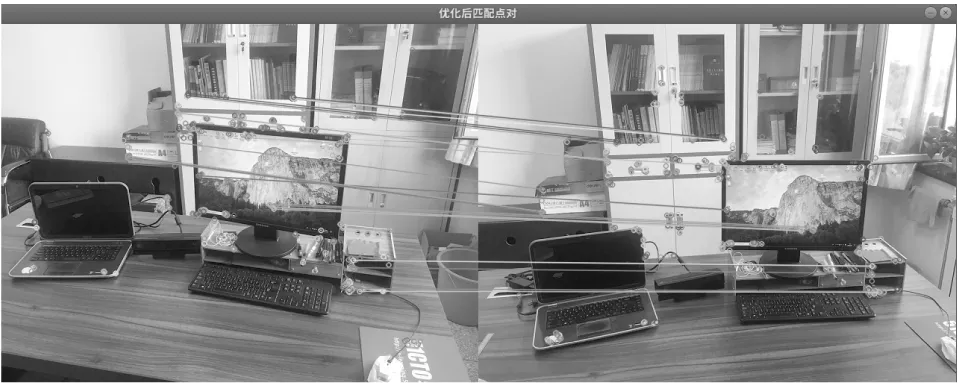
图3 SURF-FREAK图像匹配
至此相机通过图像匹配技术完成粗匹配,结合图像间对极几何约束预估相机初始位姿,为后续精匹配环节提供了一个较好的初值,有效缩短了迭代次数,降低了计算复杂度。
2.2 基于高斯分布的特征点云帧间配准模型
传统的视觉里程计只考虑图像噪声扰动模型,但未考虑RGB-D相机采集深度数据时存在噪声,导致深度值d存在误差,对位姿估计的准确性有较大的影响。因此,该文采取高斯误差模型描述RGB-D相机深度采集图像的误差,以便更好地估计相机的位姿变化。由于深度相机采集的数据存在噪声,会导致像素坐标(u,v)及深度值d存在误差,现作如下假设:
(1)u、v相互独立,且服从正态分布,即u~N(μu,σu),v~N(μv,σv);
(2)相机相邻时刻观测值相互独立;
(3)同一时刻图像提取不同特征点相互独立;
像素(u,v)处z的均值和方差为:
i∈[μu-1,μu+1],j∈[μv-1,μv+1]
(4)
空间点P(x,y,z)的位置期望为:
μ=(μx,μy,μz)T
(5)
且μz满足协方差矩阵,可表示为:
(6)
将图像特征点误差模型通过高斯表达,位置期望μ表示特征点位置理想情况,而协方差矩阵表达特征点位置在期望附近分布模型。在精配准环节,通过建立累积误差模型,并对其优化降低协方差矩阵数值,提高位置准确性。
3 点云图像帧间精配准模型
本节根据图像局部特征匹配为精配准环节中ICP算法提供初值,结合RGB-D相机图像高斯误差模型,改进传统ICP算法的距离函数,构建出新型的ICP算法目标函数,并推导出相机运动位置的期望和协方差。
3.1 ICP算法帧间配准计算
首先,将已配准特征点带入ICP模型计算。使用特征描述向量x,匹配到新一帧与历史模型集中的相似特征点,进行状态估计。
该文结合2.2节世界坐标系下特征点位置方差的描述,引入Kinect相机位姿方差,使其局部特征点位置不确定性模型具有更加完整的描述:
(7)

然后,将相邻关键帧的特征匹配点集带入ICP算法进行配准。其中ICP匹配算法中的传统欧氏距离不能体现特征点位置的空间方差,而马氏距离是一种有效计算相互匹配的未知样本集合之间的相似度计算方法。用马氏距离作为ICP算法配准准则时,对微小的扰动非常敏感,会夸大扰动或误匹配带来的影响,且缺乏描述空间距离的几何意义和直观性。因此,ICP算法的配准特征点之间的距离函数为:
(8)
其中,

3.2 视觉里程计累计误差优化模型
根据公式(8),构造世界坐标系下相机位姿累计误差模型,并求出最优的相机位置期望及协方差。
设当前场景和模型集中参与ICP配准的特征点一共为n对,其中k时刻的第i个特征点的位置期望和协方差矩阵分别用μPi,k、ΣPi,k表示。
根据ICP算法,相机位置期望μPi,k应满足:
(9)
通过对上式用μtk求偏导,计算期望极值点:
(10)
整理可得,相机位置期望μtk应满足:
(11)
根据协方差的定义,相机位置协方差阵Σtk应满足:
Σtk=E[(tk-μtk)(tk-μtk)T]
(12)

(13)
3.3 基于EKF的特征点位置一致化更新
考虑到观测噪声的存在,采用卡尔曼滤波更新特征点空间位置的一致性,降低视觉里程计的累计误差。首先,k-1时刻W坐标系下的坐标表示k时刻特征点位置的预测值,即:
(14)

(15)
当用以表示特征点空间位置误差的协方差矩阵较小时,可以用式(16)对相机位姿的期望及协方差进行近似,相对于原式(11)、(13)一定程度上降低了算法的运算量:
(16)
至此,通过公式(16)可以得到相机当前时刻的位置期望及协方差,通过记录每一时刻相机位置期望,可以得到相机运动轨迹。
4 实验与分析
实验软硬件配置如下:
深度相机:Kinect v2;
计算机硬件配置:AMD A8处理器,3.0 GHz主频,不使用GPU加速,4 G内存;
计算机系统为Ubuntu16.04,运行平台ROS kinetic。
为了验证算法的有效性和可对比性,采用TUM标准数据集,通过对办公桌前相机简单平行运动frg1_xyz数据集在保证精度的基础上测试算法实时性;此外在复杂室内办公室场景frg1_room数据集测试其准确性。同时作为比较,使用基于非线性PnP模型BA算法、基于SVD-ICP算法作为对比。
4.1 算法实时性测试
测试数据集frg1_xyz,主要用于程序实时性测试。基于此,该数据集将着重测试程序实时性,其中真实轨迹与估计轨迹对比见图4,非线性PnP-BA算法、SVD-ICP算法与文中算法的实时性对比见图5,表1记录了不同算法下的误差数据。
图4 真实轨迹与估计轨迹对比
图5 不同算法实时性图像
表1 不同算法误差 mm
从图4可以看出真实轨迹与估计轨迹的误差情况,相机在做直线运动的情况下,没有产生误差,但在旋转过程中产生少许误差。图5所展示的是不同算法处理采集图像所使用的时间,PNP-BA模型算法处理精度最高但时间最慢,原因是PNP-BA算法采用了全局非线性优化,通过构造全局误差模型并对其优化,降低了整体误差;文中算法通过图像匹配技术结合对极几何约束提供初值,相较于SVD-ICP算法不但提高了精度而且缩短了时间。可以代替ICP算法在轻量级设备上计算相机运动轨迹。表1中数据表明,文中方法误差不超25 mm,虽然PNP-BA算法误差很小,但是实时性较差,对处理器有较高的要求,不适用于小型化设备。
4.2 准确性对比实验
使用测试数据集frg1_room,对文中算法进行测试。文中算法真实轨迹与估计轨迹对比见图6,SVD-ICP算法真实轨迹与估计轨迹对比见图7,表2记录了不同算法模型下的误差。
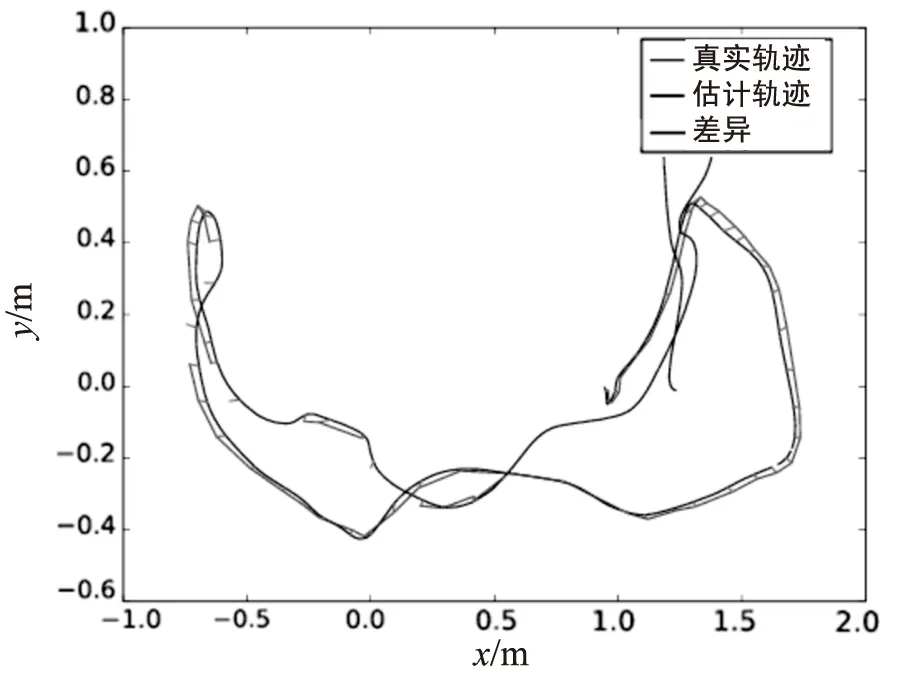
图6 文中算法真实轨迹与估计轨迹对比
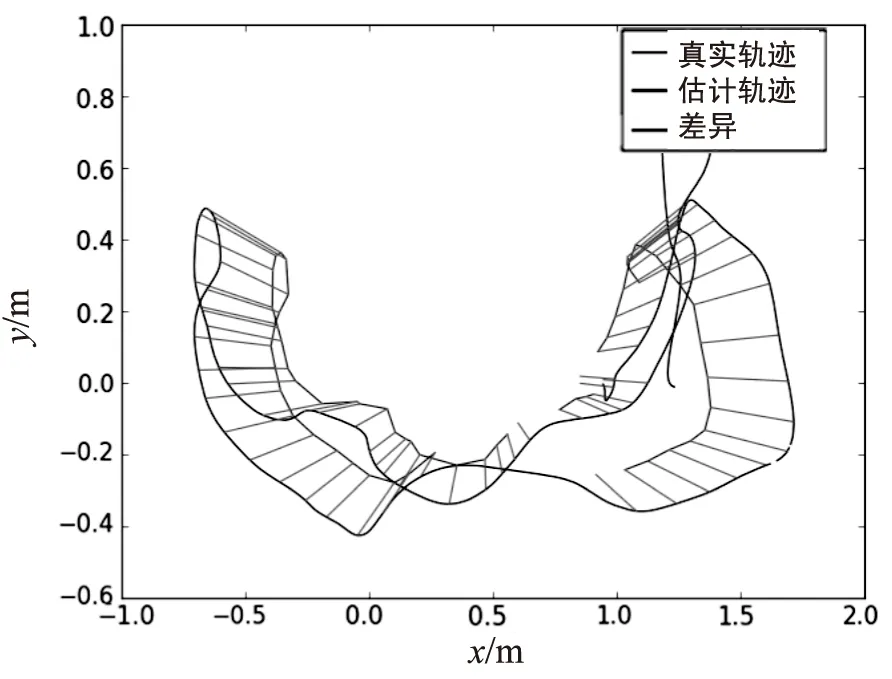
图7 SVD-ICP算法真实轨迹与估计轨迹对比
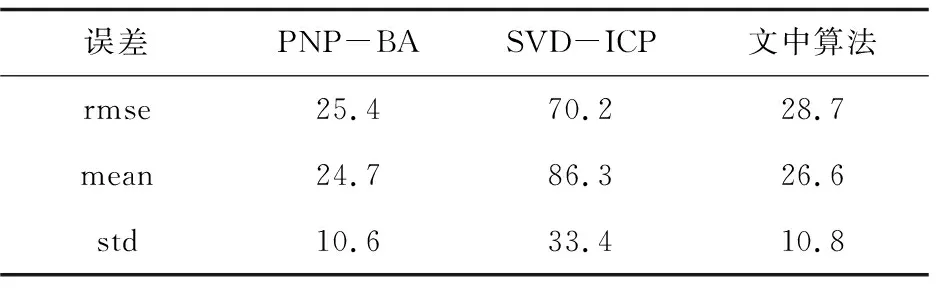
表2 算法误差对比 mm
用TUM的测试数据集frg1_room,测试室内环境下相机定位准确性。从图6可以看出,在相机进行直线运动时产生的误差较小,但当相机出现旋转运动时会出现一定的误差,因为旋转运动时相机采集的图像信息会发生剧烈的变化,所提取的特征点会有一部分失效,此时深度图像估计运动轨迹比重增大,所以程序主要的误差都是从相机旋转运动中产生。
相较于SVD-ICP算法,图7展示的真实轨迹与估计轨迹存在较大差异,一方面SVD-ICP算法未对其建立高斯分布的特征点误差模型,会存在深度图的噪音干扰;另一方面,文中设计的距离函数,既有效度量了特征点的概率位置,也考虑了其位置方差的影响,因而提高了轨迹精度。表2可以通过数据展示不同算法估计轨迹产生的误差值,其中室内环境下相机定位误差不超过30 mm。文中算法可以满足相机定位精度和实时性需求,能够较好地实现嵌入式机器视觉定位的需求。
5 结束语
视觉里程计作为SLAM重要环节之一,对减少机器运动轨迹误差、提高地图精度至关重要。该文提出一种基于FREAK-SURF特征点深度误差视觉里程计算法,旨在轻量级设备满足实时性要求的基础上提高相机运动轨迹精度,为构造地图提供准确的位置信息。首先,融合SURF特征提取算法和FREAK描述子完成特征匹配,提高匹配效率;其次,ICP配准环节设计出一种新型的距离代价函数,融合马氏距离和欧氏距离的特点;然后,根据特征点和相机空间位置误差模型,建立视觉里程计累计误差并通过扩展卡尔曼滤波器优化。对比实验表明,该算法在实时性上强于非线性PNP模型BA优化算法和SVD-ICP算法,在精度上高于传统的SVD-ICP算法。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
软件导刊(2019年12期)2019-02-07
科技与创新(2018年12期)2018-06-22
火力与指挥控制(2018年1期)2018-03-02
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14