
基于5G通信的协同自适应巡航系统
2022-04-02 06:25雷嘉豪
汽车实用技术 2022年6期
雷嘉豪,李 江,刘 波
(陕西工业职业技术学院 汽车工程学院,陕西 咸阳 712000)
随着机动车辆数量的不断增加,车辆增长的速度已经逐渐超过道路和其它交通设施的承载能力,制约了道路交通的高速发展。当车辆处于相同速度时,减小其行驶间距可以有效增加道路容量,缓解交通压力。但与此同时也对车辆自适应巡航系统的性能及安全保障提出了更严苛的要求。如何同时兼顾行驶安全和通行效率就成了当前亟需解决的问题。
近年来随着第五代移动通信技术(5th Generation Mobile Communication Technology, 5G)的发展及通信节点的普及,将5G通信技术具备的优势应用到车载自组网络(Vehicular Ad-hoc NETwork,VANET)中,就能够在一定程度上实现同时兼顾车辆安全性和道路通行效率的车辆巡航控制系统。
目前已经投入实际应用的自适应巡航系统可以通过测距传感器来检测距引导车辆的距离,进而通过负反馈控制跟随行驶。但在自适应巡航系统中,车辆与车辆之间没有信息交互,每辆车都是一个信息孤岛,所以始终只能以较大间距进行跟随行驶。基于此问题,结合5G通信技术的相关性能指标,通过将5G通信技术与VANET相融合,探究车辆在5G与VANET下的协同自适应巡航控制系统。
1 5G通信与V2X体系结构分析
1.1 V2X通信
在智能交通系统范畴内,车辆主要通过两类途径来获取外界信息,即车辆自身传感器(雷达或摄像头)和无线通信系统,而车对外界信息交换(Vehicle-to-everying, V2X)技术就是属于后者的一种。
V2X是智能网联范畴内车辆对外界交通参与者及设施的信息交换。它整合了车对车通信技术、车对交通设施通信技术、车对网络通信技术及远程感应技术等,是新一代智能交通运输系统的关键技术。而其中 V2V通信基于车载感知/通信设备,可以获得更广泛和可靠的周边车辆状态信息。在一定范围内,通过特定的通信网络将每个交通参与者的信息进行共享,如此一来就能够使车辆采集到雷达或传感器探测范围之外的关键交通信息,这些信息包括位置、行驶方向、速度以及异常的加速或制动等,如图1所示。

图1 V2V信息传递示意图
通过V2V通信的提前预知,在行驶过程中车辆就能够在最短的时间范围内对周围的潜在风险进行做出提前判断,从而提高行驶安全性如巡航控制系统收到超视距的预警信息后及时采取加速、转向或制动等)。
与此同时,在提前得到附近车辆的运动状态和其他交通信息后,有助于提升道路通行效率和行驶过程中的舒适性。
1.2 5G通信技术
第五代移动通信技术是具有高速率、低时延和大接入点数量的新一代宽带移动通信技术。其中的可靠低时延通信可以有效地面向工业控制、智能网联及自动驾驶等对时延和可靠性具有极高要求的应用需求,传输速率可达1 Gbps,时延低至1 ms;5G通信所具备的低延时高带宽及优秀的用户接入量支持特性可以有效地用于协同自适应巡航控制系统中的V2V通信组网,使系统达到更好的控制效果。
2 巡航系统跟随控制策略
协同自适应巡航系统为具有前导车辆的前向跟随拓扑结构。被实施控制的车辆可以得到前导车辆(通过雷达/传感器)及VANET(5G通信)的信息。此拓扑结构下的控制器结构框图如图2所示。通过 5G通信获取的前馈信号和通过雷达/传感器获取的反馈输入同时做为车辆的动力学的信号输入。
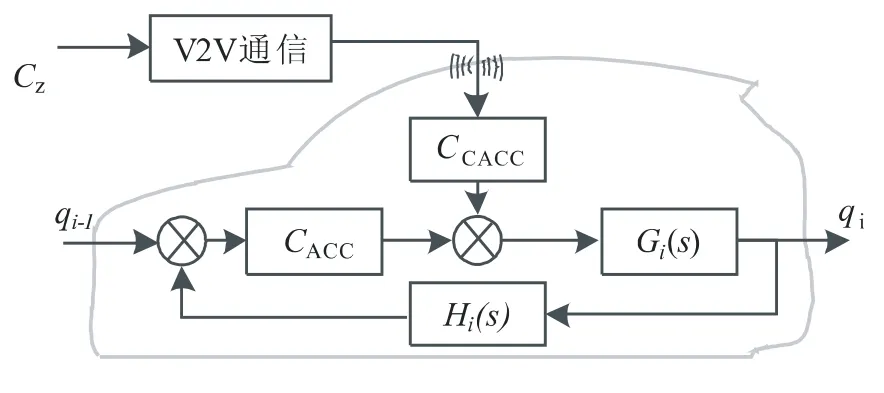
图2 车辆前向跟随拓扑控制结构
车辆之间的通信效率由网络拓扑结构来决定,车辆在处于5G通信下的协同自适应巡航时,车辆依托VANET来发送运行数据及感知信息,周边所有处于巡航行驶中的车辆都能通过通信接收状态信息。基于5G通信的队列跟随行驶模型如图3所示。

图3 协同巡航队列示意图
处于巡航控制下的车辆要保持尽可能小的车辆间距d,同时又不能够影响车辆行驶的安全性。除此之外,车流整体的稳定性也需要得到保证,当前车的运行状况发生突然改变时,引起的扰动必须要在车流向后逐级传递时持续衰减。
由此可得出基于 5G通信的车辆跟随模型如下:

是间距时间常数,其表示第辆车到达与-1辆车相同位置的时间。可以看到上图中,状态矩阵为下三角型,根据 Routh判据可知,巡航系统产生的动态误差可在间距时间常数大于零时的任何情况下达到稳定。
3 仿真实验
为了严格控制系统变量,仿真系统搭建时,不考虑 5G通信中可能会出现的数据丢包和信号干扰。同时,考虑到实际交通流中用户接入量和数据交换吞吐量与 5G通信标准设定上限相比有很大冗余,故通信延迟为设定为1 ms~5 ms,通信带宽及用户接入量不设限。对比跟随车辆在自适应巡航(Adaptive Cruise Control, ACC)与5G通信的协同自适应巡航系统下的纵向跟随行驶过程。
图4和图5分别显示了在当前ACC下的结果和在 5G通信协同自适应巡航系统下的仿真测试结果,和在前导车辆速度变化相同时系统测试轨迹下四辆车的速度响应。ACC(图4)中车流尾端车辆的最大速度为55.9 km/h,图5中则控制在了46.9 km/h,在车流中,处于尾端的车辆的最大速度波动能够体现出控制系统的跟随性能其绝对值越大,巡航系统运行时的间距就越无法保持稳定。

图4 速度响应:车辆1—6

图5 速度响应:车辆1—6(5G)
处于巡航系统控制下的跟随间距变化过程如表1所示。

表1 系统跟随间距变化
巡航过程中车辆的最大间距差如表 2所示。可以看出,在5G通信的协同自适应巡航系统下,车辆间距差绝对值显著减小。

表2 跟驰过程最大间距差绝对值
数值仿真结果显示,5G通信协同自适应巡航系统在车辆巡航跟驰过程中的最大间距和最大加速度绝对值均较小。实验结果显示,该方法在一定程度上实现了稳定的巡航跟随间距,队列稳定性较好,验证了此方法的可行性。
4 总结与展望
当前车辆自适应巡航系统无法在高速巡航中同时兼顾通行容量与安全性,而将基于5G通信的VANET融入到车辆自适应巡航系统之中形成基于5G通信的协同自适应巡航系统可以有效地解决高速低间距问题。通过仿真实验分析,结果表明5G通信所具备的低延时高带宽及优秀的用户接入量支持特性可以有效地对接车辆自适应巡航控制系统中的实际需求,从而能够在降低跟车间距的同时保证道路通行效率。
在未来智能交通的发展中,随着技术的不断革新,芯片、传感器及通信设备的性能指标还会进一步得到提升。随着 5G时代的到来,低延时高效能的通信已经为智能网联汽车的发展奠定了坚实的基础条件,车辆间真正的信息共享即将成为现实。
猜你喜欢
读者(2022年13期)2022-06-20
新班主任(2022年4期)2022-04-27
江苏科技报·E教中国(2022年3期)2022-04-19
电脑爱好者(2021年17期)2021-11-11
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
电脑爱好者(2021年24期)2021-09-09
现代信息科技(2021年21期)2021-05-07
花火B(2019年3期)2019-04-27
民生周刊(2017年19期)2017-10-25
