
联合机载激光测深波形和点云的水陆识别方法研究
2022-04-01 02:44王晓阳周丰年赵兴磊李西灿
人民长江 2022年1期
王晓阳 周丰年 赵兴磊 李西灿






摘要:水陆识别在河口海岸带水陆资源管理和科学研究中具有重要作用。利用机载激光测深(Airborne LiDAR bathymetry,ALB)回波波形和点云信息可实现水陆交界区域高精度和高分辨率水陆识别。但在复杂海陆环境区域,采用ALB波形特征或三维点云高程特征的传统识别方法具有各自不足。针对复杂海陆环境区域高精度水陆识别问题,提出了联合ALB波形和三维点云特征的水陆识别方法。首先,利用红外激光获取的三维点云高程,基于K-means聚类方法进行海陆识别。然后,利用红外和绿激光波形信息识别陆地中的内陆水域。将该方法应用于实际Optech CZMIL水陆识别。结果表明:相比传统点云聚类和波形聚类水陆识别方法,该方法将ALB水陆识别精度提高了3.6%~5.5%。
关 键 词:水陆识别; 机载激光测深; 红外激光; 绿激光; 海洋测绘
中图法分类号: P715 文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2022.01.020
0 引 言
机载激光测深(Airborne LiDAR Bathymetry,ALB)是一种高分辨率、高效率、灵活安全的浅水测量方法[1]。单频ALB系统采用波长为532 nm的绿激光探测水面和水底。双频ALB采用波长为532 nm的绿激光探测水底,波长为1 064 nm的红外激光探测水面[2]。借助ALB回波波形或测量偏差,ALB还可用于水体悬沙浓度反演[3]。ALB可实现水陆一体化测量,接收陆地和水体的激光回波波形信息。由于水体/陆地光学特性不同,ALB所接收的陆地和海洋激光脉冲回波的波形特征也不相同[3-4]。反之,利用海洋和陆地波形的不同特征,可实现基于ALB的水陆识别。
目前,由ALB获得的红外激光、红激光和绿激光波形特征以及三维点云高程已成为水陆识别的有效特征。Guenther[5],Pe′eri[6]等根据陆地波形振幅的饱和特性给出了水陆识别的红外激光波形饱和法。Collin等[7]采用该方法有效实现了水陆识别。但海上的浪花、鸟类和海水中夹杂的气泡也会导致红外激光波形振幅饱和,从而引起误识别。并且随着波形数字化仪的发展,ALB可记录激光回波的全波形数据,波形振幅不再饱和[6]。因此,该方法的适用性较差。
基于拉曼散射原理,部分ALB系统通过增加红激光接收通道并记录红激光波形实现水陆识别[8-11]。Pe′eri等[6]总结了基于ALB波形特征的水陆识别方法,包括红外激光波形饱和法、绿-红-红外激光(Green-Red-IR)波形振幅比算法和红-红外激光(Red-IR)波形振幅比算法。其中,Green-Red-IR和Red-IR振幅比算法是红外激光波形饱和法的扩展,均需要红激光波形数据。然而,除了Optech SHOALS系列,其他主流ALB系统,例如Optech Coastal Zone Mapping and Imaging LiDAR(CZMIL),AHAB HawkEye III,RIEGL VQ-880-G和Fugro LADS-MK3等,均没有红激光接收通道[11-12]。
由于陆地表面对红外激光的强反射和水体表面对红外激光的强吸收作用,通常情况下,红外激光的陆地回波振幅显著大于海洋回波振幅[13]。典型的绿激光陆地回波包含陆地表面回波,而绿激光海洋波形包含海洋表面回波、海水后向散射回波以及海底回波[1]。因此,红外激光和绿激光的陆地和海洋回波波形特征通常具有显著差异。曹彬才等[14]从原始激光波形中提取波形特征,利用支持向量机建立分类模型进行水陆识别。胡善江等[15]提出了基于深度学习的ALB水陆波形分类方法。借助ALB波形特征构建分类模型能有效实现水陆识别,但支持向量机和深度学习方法需要借助样本数据训练分类模型。此外,由于激光脉冲与环境之间相互作用的复杂性,并不是每一个海洋/陆地回波均具有典型的海洋/陆地波形特征。现实中往往出现某些海洋回波特征接近典型陆地回波特征或某些陆地回波特征接近典型海洋回波特征的情况。以上特殊波形情况会引起海洋和陆地误识别问题,降低了基于波形特征的水陆识别精度。
水面和陆地点高程具有显著差异,利用ALB三维点云数据也可实现水陆识别。赵兴磊等[13]基于水陆点高程差异,利用ALB三维点云实现水陆快速识别。该方法避免了基于波形特征水陆识别方法中特殊波形的误识别问题,但内陆水面和海面高程不同,该方法不能有效识别内陆水域。
综上所述,基于水体/陆地光学特性差异,ALB波形特征可用于水陆识别。但海上的浪花、鸟类和海水中夹杂的气泡会引起激光的强反射,导致某些红外激光海洋波形特征接近典型陆地波形特征。陆地地形因素也会导致某些陆地激光波形特征接近典型水体波形特征。在极浅水域,绿激光海面回波、海水后向散射回波以及海底回波的叠加性则会导致极浅水域的绿激光海洋波形特征接近典型陆地波形特征。由于存在以上三类特殊波形,基于波形特征的水陆识别方法会出现某些波形的误识别问题,降低了水陆识别精度。基于ALB三维点云高程的水陆识别方法可以避免波形识别方法中特殊波形引起的误识别问题,但不能识别内陆水域。为此,本文提出了一种联合ALB点云和波形特征的水陆识别方法,以此提高水陆识别精度。
1 研究方法
本文结合ALB波形特征和三维点云特征的优点,提出一种联合ALB点云和波形特征的水陆识别方法。首先,利用ALB三维点云高程通过K-means聚类识别海洋和陆地。然后,利用红外和绿激光波形特征,通过K-means聚类进一步识别内陆水域。最终实现复杂海陆环境下海洋、陆地和内陆水域的有效识别。
1.1 基于ALB点云的海陆聚类识别
与陆地点高程相比,海面点高程在围绕平均海平面的区间内变化。海面点和陆地点的高程值在不同阈值区间内。将ALB三维点云高程作为特征,采用非监督聚类方法,可在无样本数据的条件下,实现海陆聚类识别。K-means聚类算法计算速度较快,通常被作为大样本聚类分析的首选算法[16-17]。设n个数据X={x1,x2,…,xi,…,xn},在聚類开始前,需要指定聚类个数k,本文中k设置为2,即水体和陆地。K-means聚类算法的基本实现过程如下:
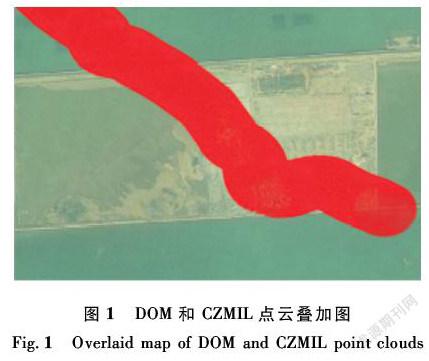
圖1为试验区域位置图,其背景图为由GF1卫星2014年12月24日观测数据获得的分辨率为2 m的数字正射影像图(DOM)。覆盖在DOM上的303 256个红色点是CZMIL测量获得的三维点云。图2给出了由CZMIL三维点云数据构建的研究区域数字高程模型(DEM),颜色表示0.85~13.8 m的点云高程变化。研究区域范围内,从CZMIL采集的原始数据中提取了303 256个绿激光波形和303 256个红外激光波形。
3 结果分析
图3~5分别给出了波形聚类法,点云聚类法和本文联合聚类法确定的试验区域内水体(包括海洋和内陆水域)和陆地。图6~8分别给出了不同水陆识别方法在水陆边界的局部识别结果。黄色和蓝色点分别表示水陆识别确定的陆地和水体。可以发现,由于极浅水域绿激光波形的叠加性,采用绿激光波形振幅特征的波形聚类方法无法有效识别内陆极浅水域。同时,由于其他特殊波形的存在,水体和陆地中存在大量误识别点。点云聚类方法虽然误识别点相对较少,但无法识别内陆水域。本文联合聚类方法采用点云高程聚类减少了特殊波形引起的误识别,采用红外和绿激光波形特征聚类有效识别了内陆水域。
以DOM中人工提取的水陆边界作为参考,评估本文方法相比传统基于波形特征或点云高程的水陆识别方法的有效性。基于不同水陆识别方法获得的水陆点以及DOM提取的参考边界给出混淆矩阵,如表2~4所列。列标签为参考边界给出的水陆属性,行标签为水陆识别获得的水面和陆地点。然后基于混淆矩阵计算相应识别方法的总体精度。波形聚类法,点云聚类法和本文联合聚类法水陆识别总体精度分别为93.7%,95.6%和99.2%。试验结果表明本文联合聚类方法水陆识别精度最高。
4 结 论
为提高复杂水陆环境区域基于ALB的水陆识别精度,本文提出了一种联合ALB点云和波形特征的水陆识别方法。该方法基于点云高程特征识别海洋和陆地,基于激光波形信息识别内陆水域,结合了点云高程特征可避免海洋中特殊波形的误识别问题以及波形特征有效识别内陆水域的优势,且不需要样本数据。实验结果表明,相比传统基于ALB点云或波形特征的水陆识别方法,本文联合ALB点云和波形特征的方法具有更高的水陆识别精度。本文方法需要借助红外激光波形信息,适用于双频ALB系统。今后有必要继续开展基于单频ALB系统的高精度水陆识别方法研究。
参考文献:
[1] GUENTHER G C,CUNNINGHAM A G,LAROCQUE P E,et al.Meeting the accuracy challenge in airborne LiDAR bathymetry[C]∥Proc.edrsel Symp. Workshop on LiDAR Remote Sensing Sensing of Land & Sea,2000(1):1-27.
[2] 赵兴磊.机载激光高精度测深与水体含沙量反演研究[D].武汉:武汉大学,2018.
[3] ZHAO X,ZHAO J,ZHANG H,et al.Remote sensing of sub-surface suspended sediment concentration by using the range bias of green surface point of airborne lidar bathymetry[J].Remote Sensing,2018,10(5):681.
[4] HUANG T,TAO B,HE Y,et al.Utilization of multi-channel ocean LiDAR data to classify the types of waveform[C]∥Remote Sensing of the Ocean,Sea Ice,Coastal Waters,and Large Water Regions 2017.International Society for Optics and Photonics,2017:10422.
[5] GUENTHER G C.Airborne Laser Hydrography:System Design and Performance Factors[D].Maryland:NOAA,1985.
[6] PE’ERI S,MORGAN L V,PHILPOT W.D,et al.Land-Water Interface Resolved from Airborne LIDAR Bathymetry(ALB)Waveforms[J].Journal of Coastal Research,2011,62:75-85.
[7] COLLIN A,LONG B,ARCHAMBAULT P.Merging land-marine realms:Spatial patterns of seamless coastal habitats using a multispectral LiDAR[J].Remote Sensing of Environment,2012,123:390-399.
[8] GUENTHER G C,LAROCQUE P E,LILLYCROP W J.Multiple surface channels in Scanning Hydrographic Operational Airborne Lidar Survey(SHOALS)airborne lidar[C]∥Ocean Optics XII.International Society for Optics and Photonics,1994.
[9] ALLOUIS T,BAILLY J S,PASTOL Y,et al.Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman,near‐infrared and green signals[J].The Journal of the British Geomorphological Research Group,2010,35(6):640-650.
[10] PE′ERI S,PHILPOT W.Increasing the existence of very shallow-water LIDAR measurements using the red-channel waveforms[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(5):1217-1223.
[11] FUCHS E,TUELL G.Conceptual Design of the CZMIL Data Acquisition System(DAS):Integrating a New Bathymetric Lidar with a Commercial Spectrometer and Metric Camera for Coastal Mapping Applications[C]∥Proceedings of SPIE-The International Society for Optical Engineering,2010 International Society for Optics and Photonics,2010:7695.
[12] CHUST G,GRANDE M,GALPARSORO I,et al.Capabilities of the bathymetric Hawk Eye LiDAR for coastal habitat mapping:A case study within a Basque estuary[J].Estuarine,Coastal and Shelf Science,2010,89(3):200-213.
[13] ZHAO X,WANG X,ZHAO J,et al.Water-land classification using three-dimensional point cloud data of airborne LiDAR bathymetry based on elevation threshold intervals[J].Journal of Applied Remote Sensing,2019,13(3):034511.
[14] 曹彬才,朱述龍,邱振戈,等.利用回波波形特征实现激光雷达的水陆分离[J].海洋测绘,2018,38(3):12-16.
[15] 胡善江,贺岩,陶邦一,等.基于深度学习的机载激光海洋测深海陆波形分类[J].红外与激光工程,2019,48(11):1113004.
[16] ABDEYAZDAN M.Data clustering based on hybrid K-harmonic means and modifier imperialist competitive algorithm[J].The Journal of Supercomputing,2014,68(2):574-598.
[17] KANUNGO T,MOUNT D M,NETANYAHU N S,et al.A local search approximation algorithm for k-means clustering[J].Computational Geometry,2002,28(2-3):89-112.
[18] ABDI H,WILLIAMS L J.Principal component analysis[J].Wiley Interdisciplinary Reviews Computational Statistics,2010,2(4):433-459.
(编辑:刘 媛)
猜你喜欢
航空学报(2022年7期)2022-09-05
汽车零部件(2022年7期)2022-08-03
——中国水陆画艺术精品展
中华书画家(2022年5期)2022-07-20
少儿科学周刊·儿童版(2022年11期)2022-07-09
科学与财富(2021年36期)2021-05-10
南方周末(2020-12-10)2020-12-10
汽车与驾驶维修(维修版)(2020年2期)2020-01-07
消费导刊(2017年8期)2018-01-18
建筑建材装饰(2017年6期)2017-07-04
学苑创造·A版(2009年6期)2009-12-07
