
小型船舶自力靠离泊青岛港探析
2022-03-31 13:33:15齐建伟
航海 2022年2期
齐建伟
摘 要:本文通过分析研究船舶自身操纵设备,包括车、舵、锚、缆等,来解决如何安全、有效、合理、无外力协助地自力靠离泊青岛港的问题。这里着重分析无拖船协助的小型船舶自力靠离泊青岛港的注意事项、靠离过程及操作要点等,以期为船舶自力靠离青岛港口提供参考。
关键词:自力靠离泊;小型船舶;车舵锚缆;操纵
1 绪 论
1.1 小型船舶自力靠离泊青岛港的研究背景与意义
伴随海运船舶多元化发展趋势,小型船舶运输始终有着不可替代的作用,着眼于船舶所有人、货主及港航企業,小型船舶如何无拖船协助利用自身设备和外界条件自力靠离泊青岛港值得去深思。希望能与各位船舶操纵者共同分享船舶操纵知识,共同创造和谐船舶操纵环境,共同促进港航企业经济发展速度,共同保证航运经济安全发展质量。
1.2 无拖船协助自力靠离泊青岛港船舶的界定
根据外界自然条件与本船实际情况相结合,能够在无拖船协助仍能安全靠离泊的船舶,就属于我们本文所讨论的小型船舶。
1.2.1 引航员引领的船舶
引航员登船引领的船舶首先必须遵守《港作拖轮使用办法》的相关规定。因此根据规定油轮液体化工品船舶、杂货船舶、集装箱船舶船长100 m以下的靠离泊可以不使用拖船;船长100~130 m的油轮液体化工品船舶和杂货船舶、船长100~140 m的集装箱船舶若配有首侧推器并状态良好可以不使用拖船。
1.2.2 船长自引的船舶
悬挂中国国旗的中国籍船舶非强制引航,船长对青岛港口情况有一定了解,对船舶操纵状况熟悉,船长有自引能力。这类船舶的拖船使用方面没有强制性规定,拖船使用与否以及使用几艘的决定权在于船长,能够不使用拖船靠离泊的船舶大多尺度不大,基本上船长160 m以下,船舶载重吨 1 5000 t以下。
2 自力靠泊要素分析
2.1 掌控船舶船位的变化
船舶在靠泊航行过程中基本都会选择串视物标航行,尤其船舶受到风流较大横向作用力时,随着航速的降低,船舶实际运动方向会与船艏向产生更大夹角,不及时选配风流压角的话,船位便会与计划产生较大偏离而产生危险,因此按照串视线航行,能够保证船舶沿着计划航线行驶。归根结底,船舶串视线的选择及单物标航行方法都会归结于船舶船位的掌控。
2.2 控制靠泊航速
在接近泊位过程中,要做好船舶余速的控制。目前,常用的船舶靠泊余速控制方法主要有:
(1)停车淌航降速,利用余速把定船舶在计划航线上,靠水阻力降速最为常用和有效。
(2)旋回降速。在航道宽度允许,周围交通状况允许的情况下,利用大舵角走“S”形,航速就会迅速下降,如果没有条件走“S”线路,就利用大舵角变向使船左右航向小改动再改回,这样同样起到降速的作用。
(3)转向降速。通过转向点时大角度转向必然会带来船速的迅速下降,如果条件允许还可以转过头再转回到计划航线上就可以达到大幅度降速的效果。
(4)拖锚降速。如果周围水域旋回余地较少,航速4 kn以下,一节甲板拖锚达到降低航速的目的,但对有些离合器船舶抛锚锚链长度就要适当长一些。
(5)倒车降速。除了紧急倒车外,出于保护主机方面考虑通常一般船舶船速低于7 kn方可倒车,此时倒车横向力会导致偏转需引起注意,另大多数可调螺距的船舶倒车效率较低。
2.3 船舶航向的调整
船舶靠泊过程是一个运动的过程,提到运动必然离不开运动方向,伴随着船位和航速的变化,航向也在不断地变化过程中,由于受到外力的干扰以及自身动力的调整,因此我们所掌握的是船舶实际航迹向,而非船首向,当然有时两者在量上是同数值的。
2.4 船舶运动三要素的关系
船舶运动三要素船位、运动方向、运动速度三者相辅相成。靠泊过程中,如果船位与码头横距较大,为了靠泊必然会调整运动方向,导致入泊角度偏大,这时的船速宜慢;如果船位摆的离岸壁较近导致横距较小,为了靠上自己泊位便会调整运动方向会导致入泊角度也变小,此时相比较于大角度入泊的船速可以快。因此三者是互相制约,互相影响,融为一体而不可脱离的。
3 小型船舶自力靠泊青岛大港港区51区
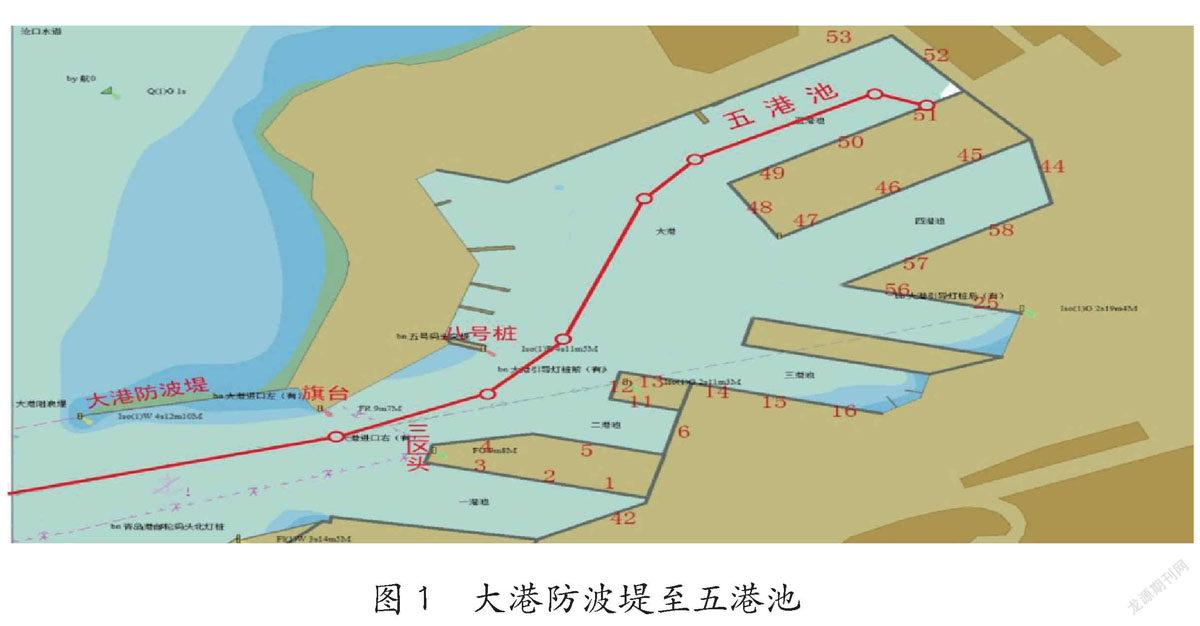
大港51区泊位水深10.3 m,泊位长度201 m,五港池可用宽度210 m,港池长度637 m,码头走向059°(239°),五港池内底质是黄泥,有利于拖锚靠泊。
3.1 青岛港大港防波堤至48区外档掉头区段航行要领
航行如图1所示。
应充分考虑到船位进入防波堤后受风流影响会变小,对船舶横移影响也将变小,应该及时调整航向保证船舶航行在计划航线上,进入防波堤后,由于流的影响微乎其微,基本只考虑风对船位的影响,若是北风或者西北风应航行在航道中心线上或者稍稍偏左侧,相反若是南风或者东南风则应航行在航道中心线上或者稍稍偏右侧,此即为常说的“抓上风抓上流”。
3.2 船舶航行进入五港池
航行如图1所示。
待船位至48区外档时即可循序渐进慢慢转向进入五港池。五港池长度约3链,因此小型满载船入五港池航速不宜大于3 kn,小型空载船舶入五港池航速不宜大于4 kn。根据风力对船舶横移的影响大小选择合理的与右侧码头或者泊位上的船舶的横距至1~3倍船宽。
3.3 入泊51区过程中锚的利用及缆绳的操作
船舶横距已经根据外界条件过49区时调整完毕,入泊角度选择30°至45°,控制入泊速度,满载船入泊速度不宜大于1.5 kn,空船入泊速度不宜大于2 kn,且要早抛锚,靠泊中拖锚的最佳效果是“微速进”船舶基本没有进速,“前进一”船舶微微前行速度较慢,车停船舶能够在较短距离内被锚拉停,此种拖锚靠泊方法更加适用于较大的横向或近于横向风流对船舶运动影响条件下的靠泊。因此船艏过50区后端时即可抛锚一节入水刹住拖锚前行观察拖锚效果,如果锚抓力较小,拖锚淌航速度下降态势不明显,立即下令逐步增加锚链长度,此加长锚链过程宜多次每次少量松出锚链,以防止锚链突然松出过长致使用到大车头仍然无法拖锚前行,通常抛锚至一节半或者两节水面刹住后拖锚令船艏向保持在泊位前部三分之一范围距离码头20 m内打撇缆绳带缆,分先后顺序,带上首倒缆和首缆并迅速绞离水面,这样通过首倒缆、首缆和锚三个方向上的力控制住船艏,利用进车左舵将船艉右甩后分先后顺序带上尾倒缆和尾缆。
应该注意以下几点:一是甩尾不可以过快而要缓,以防止锚链突然受力致使其横向船舶首尾线上受到顿力将船艏快速外拉,此时即使进车右满舵也会在短时间内难以抑制船艉甩向码头,如果出现锚链突然受力导致船艉甩向码头的态势可以用倒车、松锚链、绞首缆等措施弥补;二是船舶位于泊位外挡时松开锚链的时机要把握好,如果空船拢风较大应该选择一边松锚链一边绞缆绳,使船舶在拢风作用和锚力、舵力作用下缓慢靠拢码头,以防止锚链过早松掉,空船被风快速压向码头造成危险态势,如果是开风或者满载船受风力影响较小应该等4根缆绳(首倒缆、首缆、尾倒缆、尾缆)带上后松掉锚链利用4根缆绳将船平行绞靠泊位;三是如果位置不合适需要前后调整,应该至少带上首缆、首倒缆、尾缆、尾倒缆这4根缆绳后再进行调整,以防止船艏或者船艉斜向码头造成剐蹭。
4 小型船舶自力离泊青岛前湾港区72区
4.1 开尾
船舶开尾角度要足够,不管通过几次开尾,目的都是以将船舶倒车至安全水域为目的,一环扣一环,环环相扣,无角度不开船,尤其空船拢风较大的时候,如果角度不能够开的足够大,为安全起见可将船重新靠上码头,切不可盲目侥幸开船。
4.1.1 锚链较长较开不倚码头开尾
单绑后令锚链绞紧,如果锚链绞紧后锚链长度仍然较长,船舶微速进车船舶不會在短时间内起来前冲速度即可被认为锚链较长,同时锚链方向与首尾线有15°及以上夹角,这样就适合于此种方法。
首先,尾缆解掉,尾倒缆解掉,此时船舶必然会有些后缩,但是不会后缩太大,因为首缆会带力阻止其后缩,同时本来绞锚绞开的船艏又会重新贴向码头,待船艉缆绳清爽后正舵短暂微速进车,锚链重新吃力,令船艏重新摆出一定距离,紧跟上左满舵微速进车的指令,此时锚链吃力船艏与码头距离8 m左右,船艉持续外甩,此种方法可以大角度开尾而不致于船艏有对码头有刮擦的威胁,解掉首缆,角度开至40°左右时解掉首倒缆,同时大车头倒车(Slow Astern或者Half Astern)压反舵,起速后迅速减车或者停车,令锚链不吃力时绞,最佳效果是船舶退速与绞锚速度相匹配,船舶后退绞锚过程中始终保持锚链垂直为最佳。
如果右旋车倒车横向力较大船艉左甩厉害,势必会用到二次开尾甚至三次开尾,方法是立即停止绞锚,船舶在后退中左满舵进车,此时可以短暂加大车头,令船艉外甩,此时注意切忌船舶起来进速,之后立即压反舵继续大车头向后倒向安全水域。
如果是倒车横向力使船艉右甩的船舶,角度可以开得小一些,使船舶快速起退速,防止船艏左甩对码头或者73区的靠泊船造成威胁。
4.1.2 倚码头开尾
如果锚链太短或者是没有外档锚协助,此时就只能倚码头开尾,但是这种开尾方法所开尾的角度不会太大,势必会用到二次或者多次开尾。
尾缆和尾倒缆解掉后,船艏首缆和首倒缆绞紧,将内档锚放入水中,令船艏紧紧贴靠在码头碰垫上或者手提碰垫上,左满舵微速进车甩尾,开尾至30°时,角度再开便会对岸基设备或者码头造成威胁,不宜再开角度,解掉首缆和首倒缆,快速压反舵大车头倒车,锚链垂直不受力便绞。
在船舶退出半个船长时若船艉左甩较大,立即停止绞锚,左满舵进车继续开角度,直至船舶接近没有退速,再反舵后抽,如果后抽半个船长时如果船艉左甩又对码头或者船舶造成威胁,则按以上方法三次开角度后倒车。
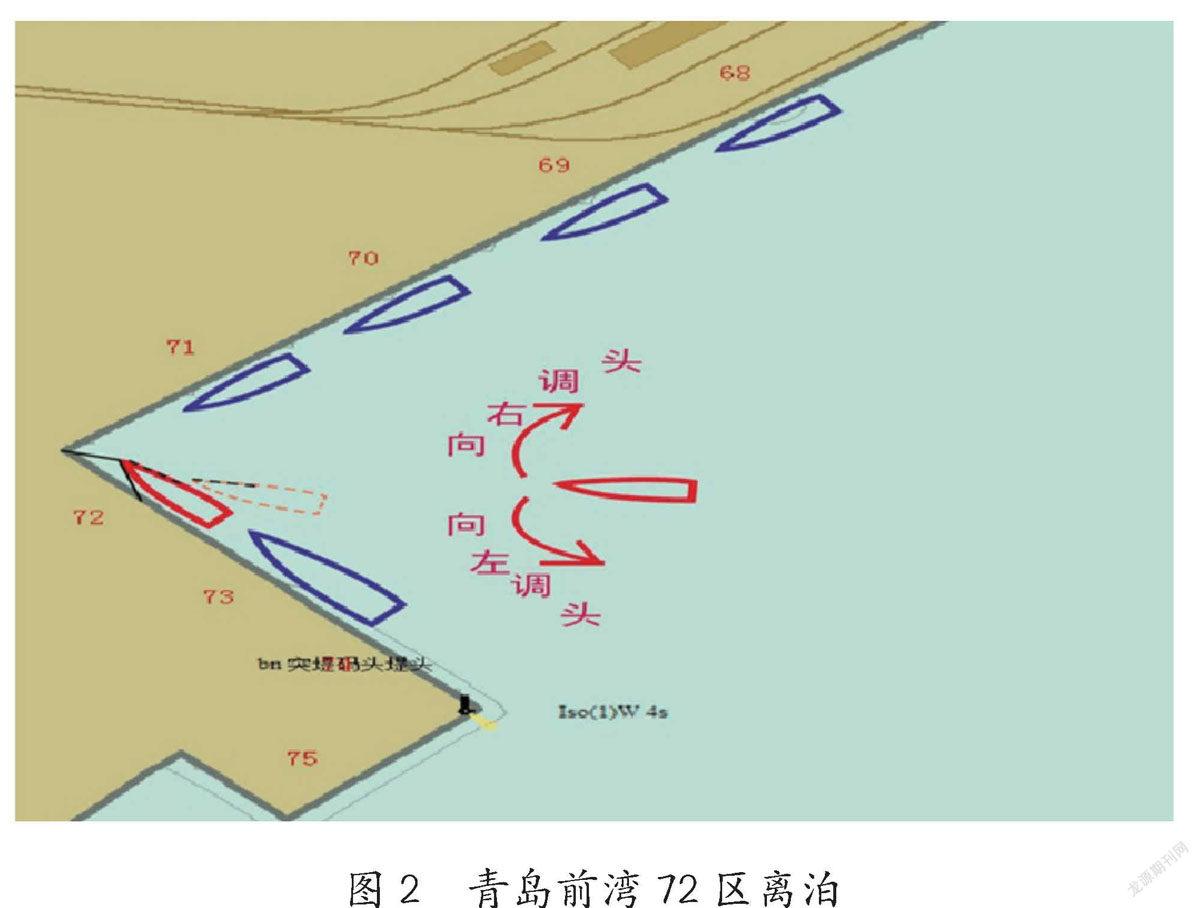
4.2 船舶倒车驶至宽敞水域
青岛前湾72区离泊如图2所示。
开尾角度足够方能放心安全倒车,在船舶倒车过程中,为抵消部分船舶侧压力同时不至于对其他船舶锚链造成威胁,可以拖锚链1节甲板稳首倒车,直至将船退至安全宽敞水域,何为安全宽敞水域?就是船舶向左向右均能安全掉头出港而又不会妨碍其他进出港船舶的水域。
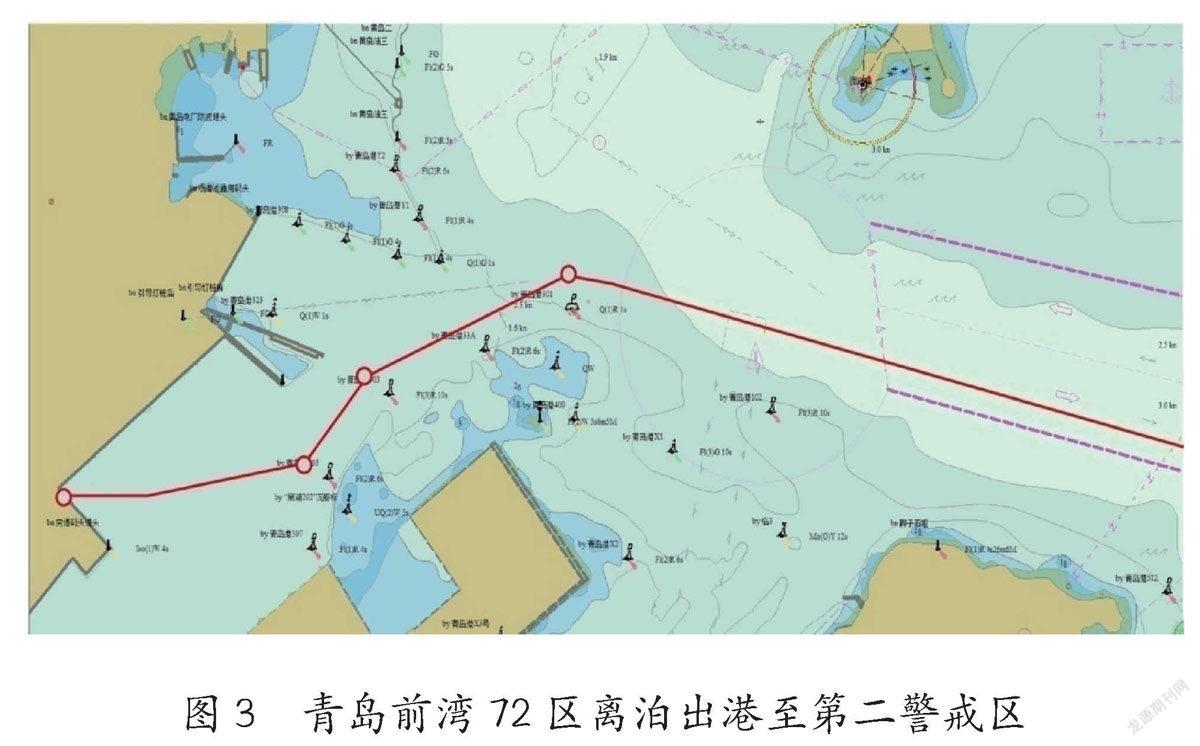
4.3 掉头出港
青岛前湾72区离泊出港如图3所示。
退至安全水域,联系周边有动态的进出口船舶,协调好避让方法,根据周边船舶会遇情况向左或者向右掉头,掉头完毕出港过程应该严格按照相关法律法规航行避让,沿航道右侧出港航行,分道通航的水域,严格按照本船的出口航道行驶出港。
5 结 论
船舶靠离泊过程的核心是船舶运动,而船舶运动必然离不开船位、航速和航向三要素,三者是相互依赖的关系。船舶航行靠离泊操纵的宗旨就是掌握船性和外界环境对本船操纵方面的影响。船舶掌控能力提高的切入点是受力分析,受力分析是提高船舶操纵技能的最有效方法。
船舶操纵者清晰了解影响到船舶操纵的青岛港的自然外界条件,熟悉所操纵船舶的船性,充分利用好本船车、舵、锚、缆等自有设备来调整船舶运动三要素,无拖轮协助航行靠离青岛港就会变得有章可循了。
参考文献
[1] 赵月林编. 船舶操纵[M]. 大连:大连海事大学出版社,2006.
[2] 王升润编.力学[M].北京:人民交通出版社,1995.
[3] 蒋维清编.船舶原理[M].大连:大连海事大学出版社,2005.
[4] 朱金善编.船舶避碰[M].大连:大连海事大学出版社,2012.
[5] 夏国忠.船舶结构与设备[M].大连:大连海事大学出版社,1998.
