
双轴高精度太阳能自适应跟踪系统研究与设计
2022-03-30 03:36赵继忠
电源技术 2022年3期
吴 硕,赵继忠
(1.辽宁开放大学,辽宁沈阳 110034;2.辽宁装备制造职业技术学院,辽宁沈阳 110161)
随着全球环境污染问题日益加重,不可再生能源逐渐枯竭,太阳能作为一种新能源,已广泛应用于发电、供暖、集热等人类生产生活中。然而,太阳能受地理位置、气候条件、季节变换等因素影响,制约了其开发和利用。太阳能跟踪采集是其开发利用的关键技术,也是国内外诸多学者长期研究的课题。
文献[1]设计了一种大范围光电跟踪传感器,建立了粗跟踪模块、精跟踪模块和主控模块,有效提升了跟踪系统效率。文献[2]设计了PLC 双轴控制系统,利用太阳位置算法,对太阳能进行自动跟踪,提高了太阳能利用率。文献[3]将光电跟踪和视日跟踪进行有效结合,设计开发了一种高精度太阳能伺服闭环跟踪系统,从而将跟踪控制精度控制在0.1%。文献[4]提出了一种开环和闭环混合的跟踪策略的控制系统,探讨了一种低成本机械结构跟踪装置的算法。
因此通过上述相关文献梳理总结,我们发现,目前太阳能跟踪采集技术主要包括:
(1)光电跟踪:通过光电(图像)传感器检测太阳光变化,经过主控系统判断计算后,通过执行机构实时跟踪,属于闭环实时跟踪。但其受天气影响较大,局部阴影时,无法对太阳位置进行有效校正。
(2)视日跟踪:通过太阳位置算法,计算出跟踪装置高度角和方位角,通过执行机构调整到相应的方位,实施全天候跟踪,属于开环控制。从机械结构旋转自由度可分为单轴、极轴、双轴控制。然而,太阳能轨迹算法受季节和时间变化,程序执行中容易产生积累误差,需要精确的地理位置和准确时间来源。
(3)光电跟踪和视日跟踪混合。此种跟踪方式可以将前两者进行优势互补,但控制系统复杂度较高,成本提升。
针对文献提出的跟踪方案的特点,基于进一步提高、改进跟踪系统的精度,文章提出了一种基于闭环控制光电(图像)跟踪和开环控制视日(日历)跟踪混合跟踪策略,设计以DSP+PLC 为核心的主控系统,搭建相应实验平台,采用太阳位置跟踪和改进图像处理算法,实时调整碟架机构位置,以此验证、探讨跟踪系统的稳定性和精度。
1 系统总体结构设计
1.1 机械结构设计
考虑到本系统对太阳聚光性有较高的要求,系统采用斯特林碟架结构设计,如图1 所示。其主要包括:反射镜面、镜面支撑、吊臂、基座、光电转换装置、驱动装置等[5]。同时,由于太阳在天空中的高度和方位是不断变化的,太阳光线达到地球时会产生两个不同的角度,即方位角和高度角。因此,需要采用双轴结构对太阳的方位角和高度角进行实时跟踪,以此到达最佳聚光效应。

图1 斯特林碟架结构
1.2 跟踪原理
本系统采用开环和闭环相结合的跟踪策略对太阳能进行实时采集跟踪,其控制系统原理设计如图2 所示。

图2 系统原理组成
其工作过程分两部分:
(1)粗跟踪部分:通过外部GPS 模块自动获取系统装置的经纬度和时间信息,然后通过串口将信息发送至PLC,并调用太阳位置算法(SPA)功能块,得出当前太阳方位角和高度角位置信息,并完成碟架机构调整。
(2)精跟踪部分:利用图像处理传感器采集太阳光斑图像,然后通过DSP 图像处理算法得出太阳位置相对于太阳光斑质心的偏转角度,并由DSP 转换成方位角和高度角信息传递到PLC,实施碟架位置精确调整。
2 硬件结构设计
控制系统以PLC 和DSP 为控制核心,由视日跟踪、光电跟踪、电机驱动模块、上位机监控模块组成,硬件设计连接如图3 所示。后文将对硬件结构各功能模块设计进行具体介绍。
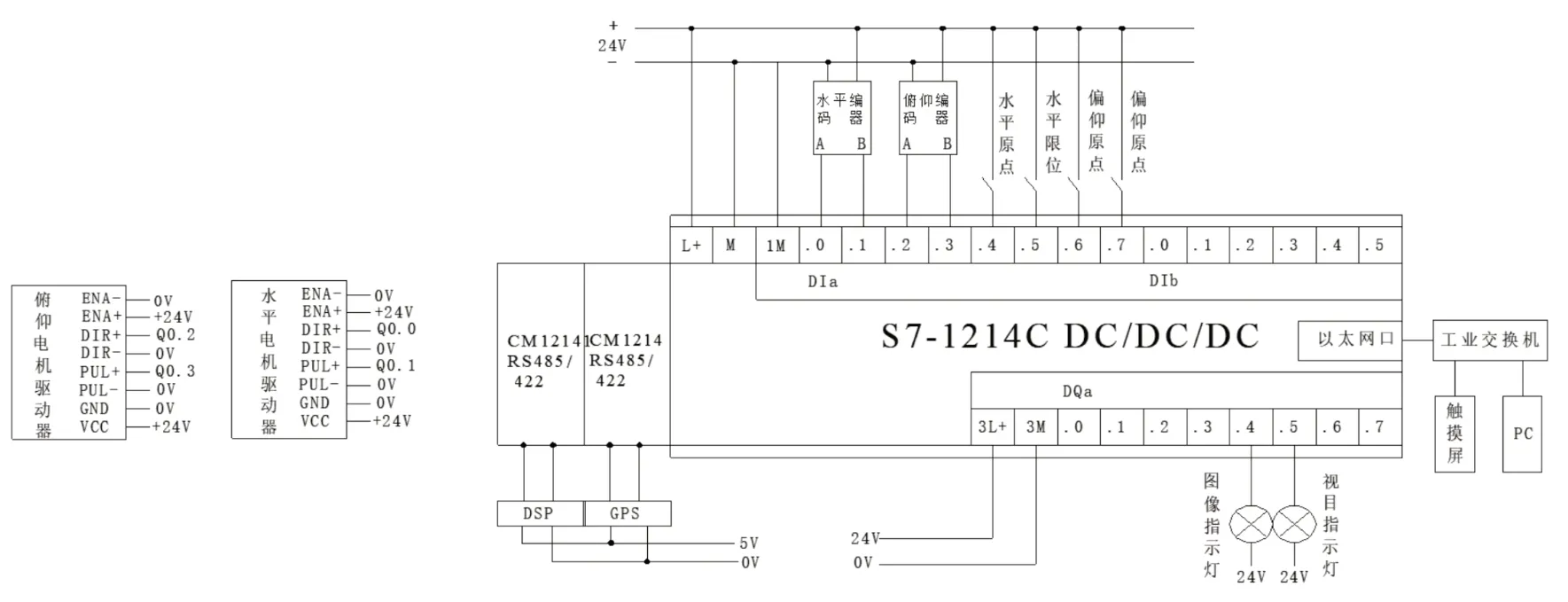
图3 硬件结构设计
2.1 视日跟踪模块
该模块主要功能是通过GPS 串口信息发送至PLC 调用太阳位置算法,并根据图像处理计算最终结果,驱动步进电机转动碟加到太阳光最佳采集位置。
(1)GPS 接收器:接收器NAVILOCK NL-403P 支持NMEA0183 协议,可以输出当地日历时间、经纬度、海拔天气等信息,通过RS232 串口信息发送至PLC。
(2)PLC 控制器:采用西门子S7-1214C,DC/DC/DC 型号PLC,其内部集成14 点输入、10 点输出、1 个以太网通信端口、4 路脉冲输出、6 路高数计算器,自带SPA_CALC_SUN_vector功能块,方便计算太阳位置信息。同时,考虑到PLC 与GPS和DSP 串行通讯,需扩展CM1241 232 通讯模块。
2.2 光电跟踪模块
光电跟踪模块是控制系统提高跟踪精度的关键所在,主要由图像传感器和DSP 构成。该模块放置在一个密闭并遮光的长方体盒子内,太阳光入射至盒顶部切开的圆孔,并在其下面的透明板上形成一个太阳光斑。光斑被盒子底面放置的图像传感器和DSP 构成的光电模组获取并处理,以此完成太阳位置跟踪。
由于太阳光斑移动缓慢,对图像传感器采集精度要求不高,因此考虑成本等因素,本文采用以CMOS 图像传感器为核心的OV7620 摄像头模组,利用其SCCB 总线,完成取窗口、白平衡等初始化工作。
图像传感器拍摄的图像通过DSP 进行运算和处理,硬件连接图如图4 所示。由于图像采集处理模块仅对灰度图像进行处理,数据输出仅仅采集OV7620 的Y0-Y7 亮度数据。因此,我们采用TMS320VC5416 DSP 便可符合要求。
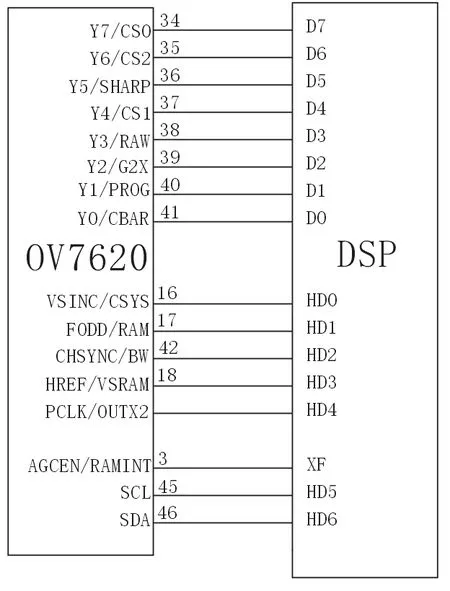
图4 图像采集电路图
2.3 电机驱动模块
该模块主要完成斯特林碟架水平和俯仰两个方向的位置控制。其中,位置控制包括粗跟踪和精跟踪环节中PLC 对步进电机的控制。
(1)步进电机及其驱动装置:PLC 将高度角、方位角信息转换成脉冲发送给步进电机带动轴的转动,因此其无法与PLC 直接连接,需要配置相应的驱动器。根据工艺要求,本系统采用西门子M542 步进驱动器予以驱动控制,1 600脉冲/转,8 细分。
(2)旋转编码器:控制系统需通过旋转编码器对碟架转动位置予以判定、校正。因此,采用欧姆龙E6B2—CWZ5B 增量式编码器接至PLC 输入口,通过PLC 内部的高速计数器对脉冲计数,反馈碟架自身位置信息,进行方向、位置校正。
2.4 上位机监控模块组成
为便于工业现场操作,系统除配置启动、停止、正反/上下等机械按钮控制外,还设置上位机触摸屏监控模块。触摸屏配置选用MCGS 公司的TPC1061TD 工业触摸屏对跟踪系统实时运行情况予以监控,该屏内置1 个以太网和1 个RS485/232 接口,可以与PLC 进行PROFINET 网络通讯。
3 系统软件结构设计
3.1 主程序设计
系统主程序工作流程为:系统开始初始化,首先调用太阳位置算法,实现粗跟踪。然后,进入图像处理环节,判定太阳光斑所处位置是否处于传感器视场范围内,如在范围内,调用图像处理算法,通过DSP 计算太阳方位偏转角,反馈给PLC 进行步进电机位置闭环控制。如不在范围内,返回粗跟踪环节(视日跟踪),最后,待系统执行一个周期后,结束运行。其工作流程如图5 所示。

图5 主程序流程图
3.2 视日跟踪程序设计
(1)GPS 与PLC 通讯
PLC 对GPS 发送的ASCII 码进行解析和解码,并按照一定周期获取基本定位数据。在编程调试时,PLC 通讯口波特率设置4 800、无奇偶校验、8 位数据位、1 位停止位。我们通过TIA PORTAL 全局库下载GPS 通讯功能块,简单编程,便可读取相关经纬度信息,如图6 所示。
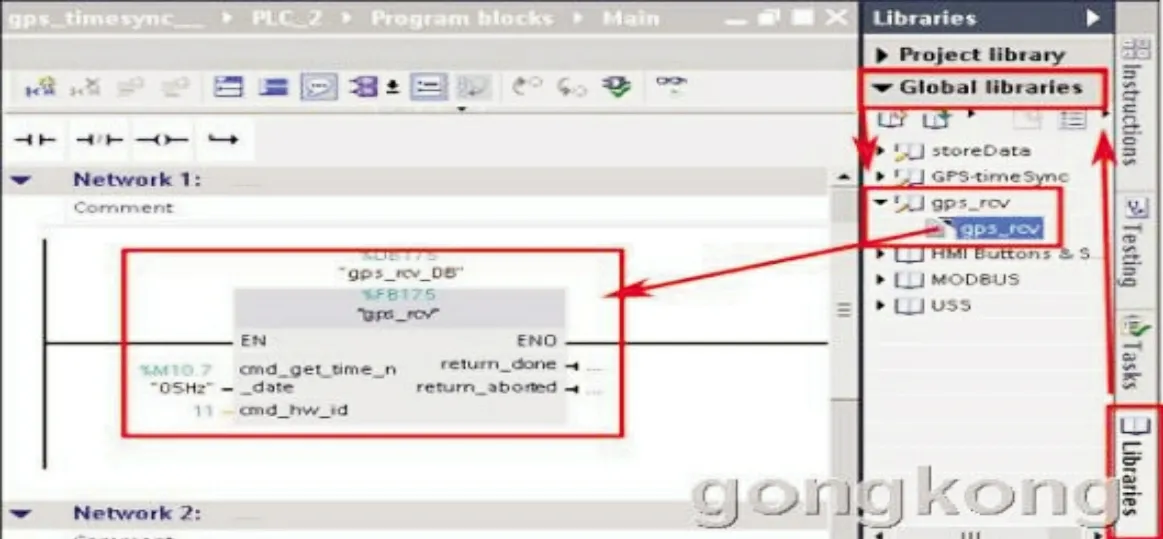
图6 GPS 功能块调用
(2)太阳位置与电机控制程序设计
通过TIA PORTAL 软件调出太阳位置算法和轴工艺对象功能块,计算出太阳高度角和方位角,并转换成脉冲。利用PLC 内置高速计数器对编码器脉冲计数,并比较高度角和方位角变化值,驱动电机转动,其工作流程图如图7 所示。如若编码器反馈来的脉冲数与PLC 计算的高度角和方位角相等,则说明碟架调整完毕。否则,还需进一步校正、调整碟架。

图7 视日跟踪流程图
3.3 图像采集与处理程序设计
摄像头采集太阳图像后,发送至DSP 进行太阳光斑位置的运算处理。其中,DSP 处理程序算法包括:图像光斑处理、太阳质心获取和坐标转换三部分。图8 为图像采集与处理流程图。
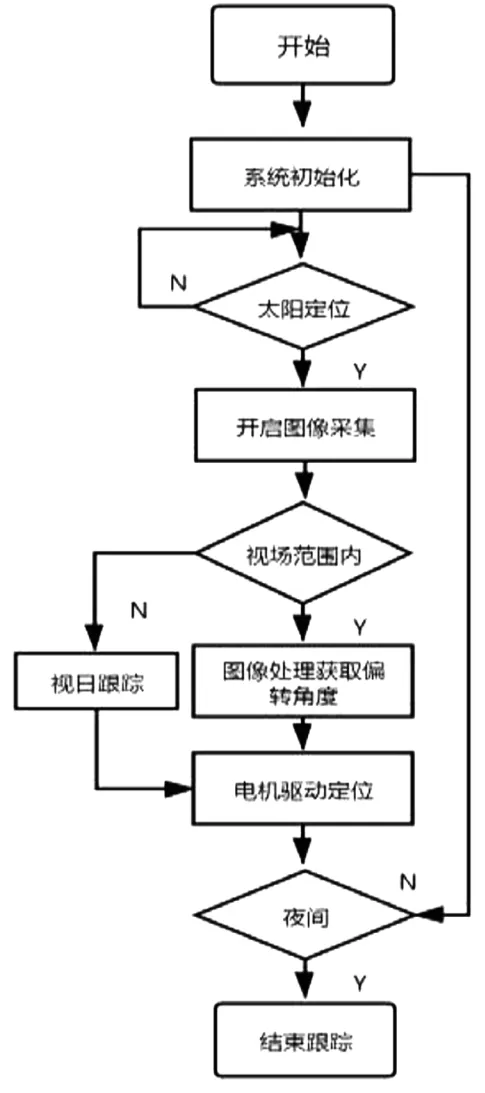
图8 图像跟踪流程图
如果太阳质心在视场范围内,首先采用二值化算法后,分离光斑。然后通过二进制跟踪质心算法,采集到图像最大灰度值点位置[6],并通过坐标转换算法得到太阳光斑水平和垂直的偏转角度。最后,通过DSP 串口发送至PLC,PLC 内部通过PID 控制计算出相应的偏差校正脉冲量,进而实现对太阳位置的精跟踪。如果太阳质心由于阴天或被遮挡时不在视场范围内,则转入视日跟踪模式。
4 实验结果与分析
4.1 触摸屏画面测试
本实验安排在辽宁沈阳郊区某太阳能光伏实验基地完成,通过采集2020 年11 月14 日实验相关数据,测试跟踪系统硬、软件指标是否达到技术要求,系统上位机监控画面如图9所示。

图9 触摸屏画面测试
我们可以看出,触摸屏画面能够正确实时显示跟踪系统的各种信息,可以进行本地/远程、手动/自动操作,也可在图像跟踪/日历跟踪系统切换。
4.2 碟架运行测试
在手动调整碟架位置时,考虑到两轴减速机齿轮比不同,俯仰电机速度设定为2 000 r/min,水平电机速度设定为1 500 r/min,电机运行过程稳定,无卡顿现象。但在系统自动回原点过程中,偶发“卡顿”、“停机”现象,主要是由于电机回原点速度过低造成的,在TIA PORTAL 分别将回原点加速度提高至25 和20 mm/s2,卡顿停机现象消除。
4.3 跟踪精度测试
整个跟踪系统运行时首先采用视日跟踪方式通过太阳位置计算出太阳相应高度角和方位角,然后通过执行机构位置调整,达到跟踪目的。因此实验选取11 月14 日10 点、11点、12 点三个时间段进行跟踪观察,测试时间段多云晴朗,如图10 所示。结果表明:太阳光斑准确地聚焦在跟踪区域内,可以实现乌云无太阳条件下粗跟踪需求。
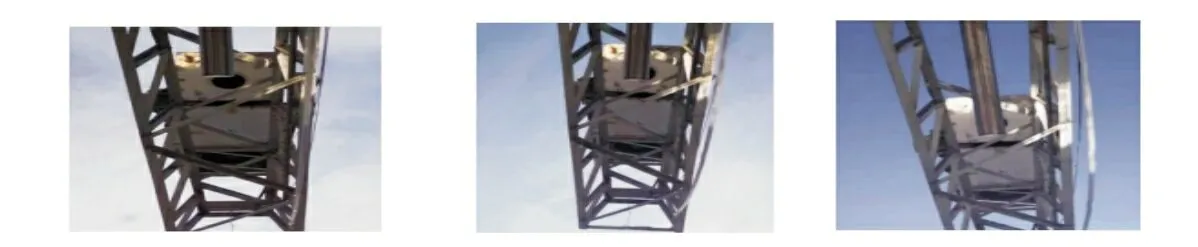
图10 不同时间段内视日跟踪系统效果
视日跟踪完毕后进入图像跟踪环节。实验同样选取上述时间段进行图像比较分析,如图11 所示。结果表明:太阳光斑能及时聚焦在碟架光腔中心位置。同时,当天空有乌云或遮挡时,自适应调整换到视日跟踪。

图11 不同时间段内图像跟踪系统效果
最后,为检测跟踪系统的平均精度,随机选取2020 年11月14 日上位机导出的数据信息,如表1 所示。通过对数据比较分析可得:视日跟踪平均精度可达±0.03°,图像跟踪平均精度可达±0.02°。

表1 监控数据信息 (°)
5 结论
研究设计了一种基于PLC 位置控制和DSP 图像处理的双轴太阳能自动跟踪系统。该系统采用太阳位置和图像改进算法相结合的控制策略,利用西门子TIA PORTAL 工业自动化集成控制软件实现了跟踪系统闭环和开环控制的有机衔接。实验数据表明:跟踪系统整体平均精度可达±0.03°,满足工业生产要求。但需要指出的是,系统数据是基于机械装置和天气状态均良好的条件下采集完成的,如考虑极端天气和设备老化情况,实际跟踪效果和理论数据还有一定差距,系统硬件设备和算法还需进一步改进。
猜你喜欢
结构工程师(2022年2期)2022-07-15
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
空间科学学报(2020年4期)2020-04-22
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
