
基于TEC和PID的恒温控制系统
2022-03-30 14:02刘丽飞吕卫星
计算机测量与控制 2022年2期
刘丽飞,吕卫星,武 超,任 英
(中国原子能科学研究院,北京 102413)
0 引言
量热法是放射性核素质量计量最有效的无损分析(NDA,non-destructive assay)方法之一[1-3]。基于稳态的量热系统达到热平衡后,环境温度波动会破坏热平衡,影响测量结果[4],因而对环境恒温要求较为严格。国内外量热系统大多通过恒温层减小温度波动,温度检测和控制的准确性将直接影响测量的稳定性和准确性,测试环境温度控制已成为量热测量的必要关键技术之一。
目前为止,对于量热系统测量环境的稳定措施主要体现在以下几个方面:1)控制所处环境室温;2)降低环境气流波动;3)引入恒温系统。系统所处室内环境的稳定性是系统温度稳定性的前提与保障,但并非稳定量热系统温度的充分措施,因而多数基于稳态热平衡的量热系统引入了恒温系统,作为测量过程稳定系统温度的直接有效措施。恒温系统有两种基本的作用思路:1)被动式恒温,通过在量热计核心测量部件外围设置恒温体,恒温体由高热容、高导热材料形成,且具备足够质量,可有效吸收因温度和气流而来的环境波动,具备较强的缓冲作用,将测试系统与不稳定环境隔离。该方法主要依赖恒温体的固有属性进行被动式阻隔,恒温效果主要取决于恒温体规格选择的合理性以及环境温度的波动程度,设计成型后,精度控制余地较小。系统测试温度主要取决于环境温度,仅能做到稳定,但无法控制稳定的数值;2)主动式恒温,在引入恒温介质的同时,对恒温介质的温度进行管控。通过引入适当的恒温措施,精准控制恒温体温度维持在需求温度。主动式恒温具备控温能力,效率及精度都有所提高,而为量热系统恒温控制所广泛采用。
本研究旨在设计具备控温能力的主动式恒温系统,研究恒温策略,以为量热测量提供恒温测试环境,降低环境温度的不稳定性对测量结果的影响。
1 系统结构及原理
量热系统一般设置恒温层,存在固态、液态、气态多种形式的恒温介质,因此本系统在与量热系统恒温层的硬件接口上采用分离式结构设计,即在量热系统恒温介质层与本系统控温元件间适当施加过渡介质,过渡介质作为高导热部件,即可增大制冷元件与恒温系统间的传热面积,又能拓展恒温控制系统对于不同恒温介质的适应能力。
系统总体结构如图1所示,在恒温层不同代表性点位布置多个温度探头,通过高精度多通道温度测量仪采集实时温度;经程序比对与预设温度差异,通过数字源表,调控施加在半导体制冷元件上的制冷/制热功率,最终实现对目标对象的温度调控。
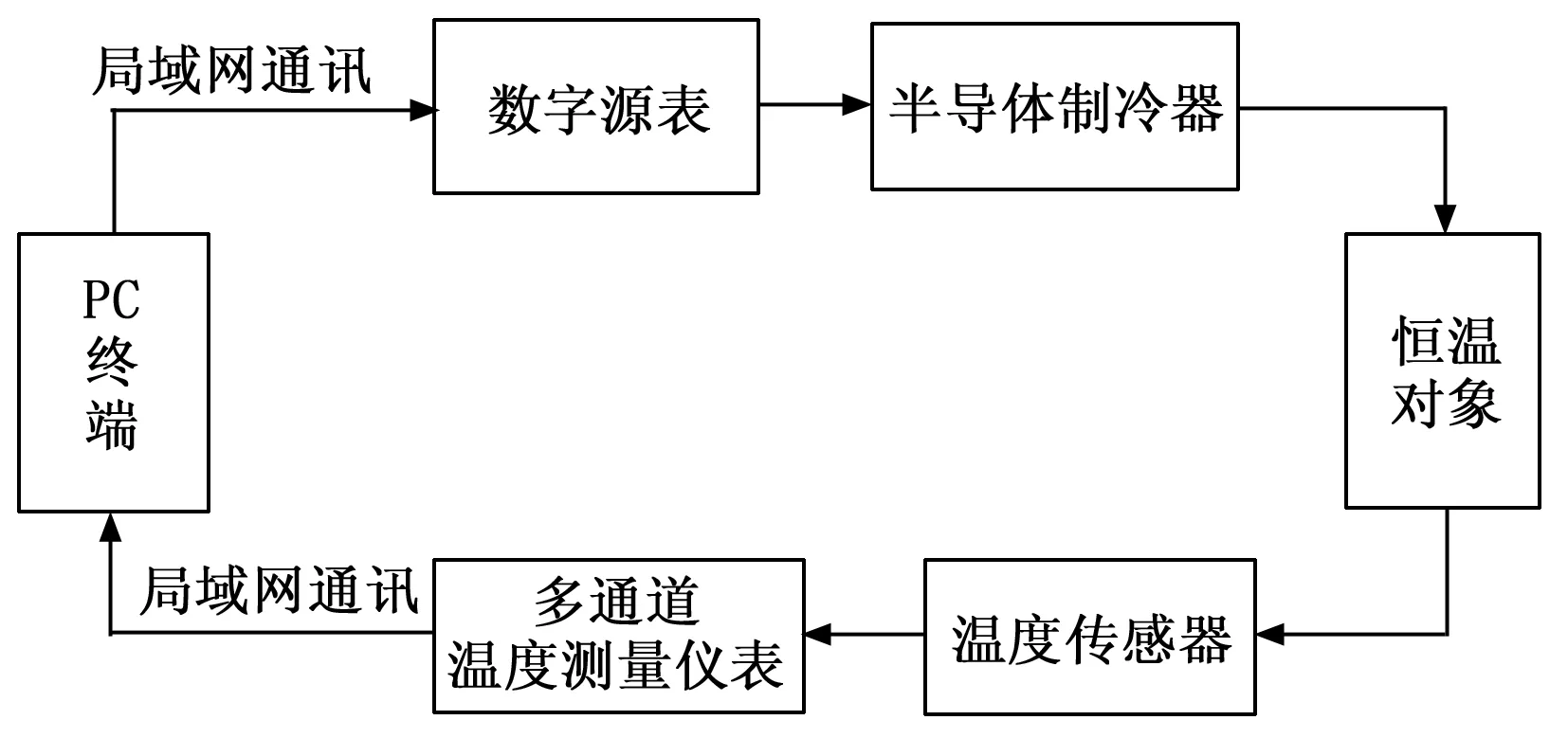
图1 恒温系统总体结构设计
测控系统软件所在PC端基于工业控制计算机,通过网络通讯LAN接口将温度测量仪表采集的温度信号传入PC端数据采集模块,显示存储后,更新预设控温点实时温度数据,经自动调节控制算法计算被控外设的控制参数,通过传输指令经网络通讯线路发送至高精度数字电源表。利用电源表的嵌入式脚本编辑功能,在源表内部存储并执行预定义的功率输出控制脚本程序。电源具备双向电流输出能力,通过调节电源的直流电流输出以调节控制半导体制冷器的制冷/热量,来实现对目标对象温度的精确控制。
2 系统硬件设计
2.1 制冷元件
半导体制冷[5]主要利用帕尔贴效应实现能量迁移,即当直流电通过两种不同导电材料的接界面时,结点处将产生吸热或放热现象,因而既能制冷,也能加热。只需改变工作电流方向就能实现加热和制冷工作状态的转换,使用一个半导体制冷器就可以代替分立的加热系统和制冷系统。与传统的压缩机制冷技术相比,半导体制冷具有结构简单、无制冷工质、无运动部件、无机械损耗、无噪声、体积小、重量轻、控制灵活、可靠性高、热惯性小、易于进行冷量调节等诸多优势,尤其在小冷量、空间受限的应用场景有其独到之处[6-8]。半导体制冷器单个制冷单元对的功率很小,一般需串联同类单元以提高制冷功率。但因极限温差限制,一般工作温度不可过高。
设计系统所服务的对象—量热系统工作于室温,所针对的控温对象—量热系统恒温层常规工作温度接近室温,因而温度改变及能量迁移需求并不显著,采用半导体制冷器作为控温元件尤为适合。选用美国TE公司生产的VT-127型一体化半导体制冷器,最大功率80 W,最大温差70 ℃。使用24只VT-127型制冷器,结合数字电源的电压电流限值要求,系统输出总功率可达1 200 W,足以保证位于恒温层内部的测量室在进行大功率热源样品测量时也可以达到控温精度。制冷器安装散热片及风扇以提高制冷/制热效率。
2.2 测温元件
常用的温度传感器主要有热电偶及热电阻。Pt100型铂电阻温度传感器具有精度高、稳定性好、响应速度快的优点,是中低温区常用的一种温度检测传感器。根据系统测温范围及精度需求,选用Pt100型铂电阻温度传感器作为温度测量元件,AA级允差等级(允差值:±(0.1+0.001 7|t|,|t|-温度绝对值,单位为℃)。
接线方式会对Pt100型铂电阻温度传感器的测量结果产生较大影响[9],影响主要来自连接导线的电阻:两线制接线,引线电阻会计入测量结果;三线制测量常与电桥配套使用,可较好消除引线电阻影响,但要求三根引线电阻值完全相同;四线测量时两根引线提供恒定电流,另外两根引线用于测定电阻两端电压,可完全消除引线电阻影响。本系统采用四线制接线方法,以减少测量误差。
2.3 电源
现阶段的电源系统一般提供电压或电流输出控制,功率控制则需要人为在程序算法内改造。电源表的输出精度及可靠性直接决定了控温系统的控温精度及可靠性,本研究选择Keithley 2461高精度数字电源表作为半导体制冷器的供电电源。Keithley 2461高电流Source Meter融合了7A/100W DC电流和10 A/1 000 W脉冲电流功能,双18位1 MS/s模数转换器,支持快速采样测量;具备0.012%DCV准确度,位分辨率;源和阱(4象限)操作;支持SCPI和测试脚本处理程序(TSP)编程模式。
2.4 温度测量仪表
同电源一样,温度测量值作为PID控制策略的输入参数,其精度及稳定性也将对控温效果产生显著影响,选择Keithley 3706A数字多功能表进行温度信号采集。Keithley3706A是一款快速、精确且高稳定性的多用表,四线制RTD温度测量(-200~630 ℃)具备0.01 ℃分辨率;超过14 000读数/秒的内存速度;支持嵌入式测试脚本处理器(TSP);具备以太网、USB、和GPIB通讯接口。该系统包含一个六槽的开关系统,配合系统插卡,能够以低成本建立一个可扩展的多通道解决方案。
Keithley所有基于测试脚本处理器(TSP)功能的系统均能够存储并执行大量预定义的器件测试脚本。本系统所采用Keithley系列仪表均具备嵌入式脚本编程功能[11-12],仪器内置微处理器,支持各种复杂测试脚本的编程与独立执行。
采用工业控制计算机,基于NI公司的LabWindows/CVI虚拟仪器开发平台,集成开发量热计恒温控制系统。
3 系统软件设计
利用智能仪表提供的网络通信(LAN)接口,实现与PC端测控系统软件的网络通信。PC端作为客户端,仪表端作为服务器。客户端经验证与服务器建立连接,服务器将实时温度数据和功率信息以数据包形式发送给客户端,供客户端程序分析处理及计算调控;同时,客户端通过向服务器发送命令控制和配置服务器,实现双向网络通信。测控系统软件通信框架及流程如图2所示。客户端与服务器建立链接后,服务器端的智能仪表-数字电源及温度测量仪表通过内置脚本程序完成仪表参数初始化,温度测量仪表进行监测点的温度数据采集,数字源表接收输出功率命令信息,计算及控制输出相应功率参数。
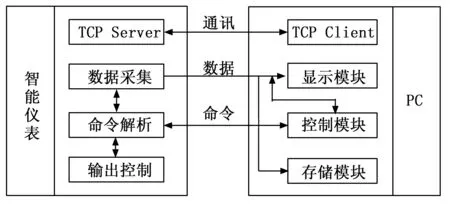
图2 软件通讯架构及流程图
系统软件开发基于交互式C语言开发平台LabWindows/CVI,分为测量和控制两部分。测量程序流程如图3所示,主要负责实时采集系统变量,即温度及电流电压数据,进行数据解析,异常值判定及警告,并在软件界面实时图形化显示并保存;同时将实时温度数据传递给控制部分,供其计算取用。控制程序流程如图4所示,主要根据测量部分所传递的控温点实时温度数据信息,利用PID控制方法计算所需输出的控制量,经专属通讯通道传递至数字源表。本系统设计控制部分所传递的控制量为功率值,经过数字源表内置脚本程序自动计算并输出与功率值相匹配的电流值,以电流方向控制半导体制冷器的制冷/制热作用,以电流大小调节其制冷/制热量。
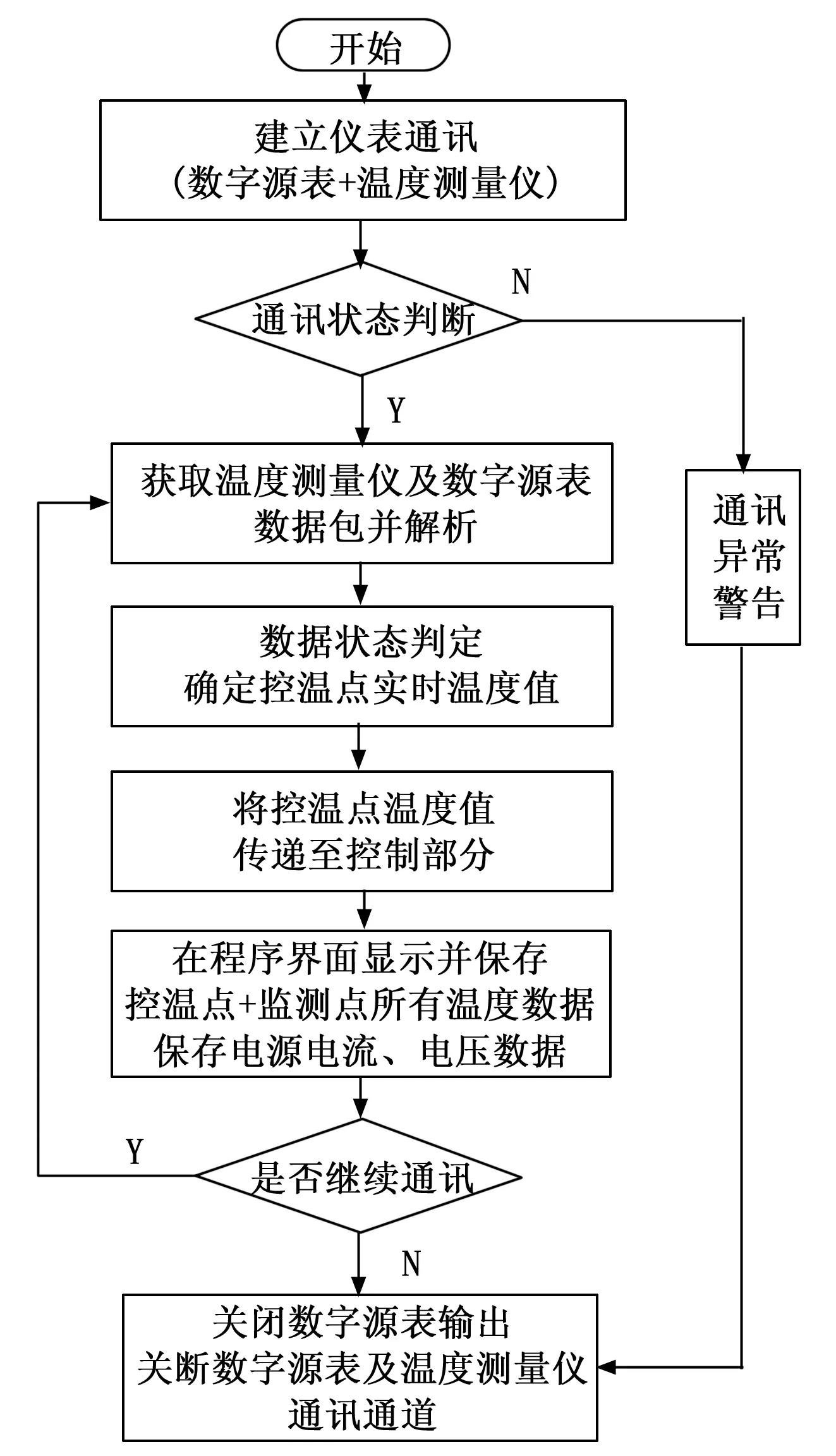
图3 测量部分流程图
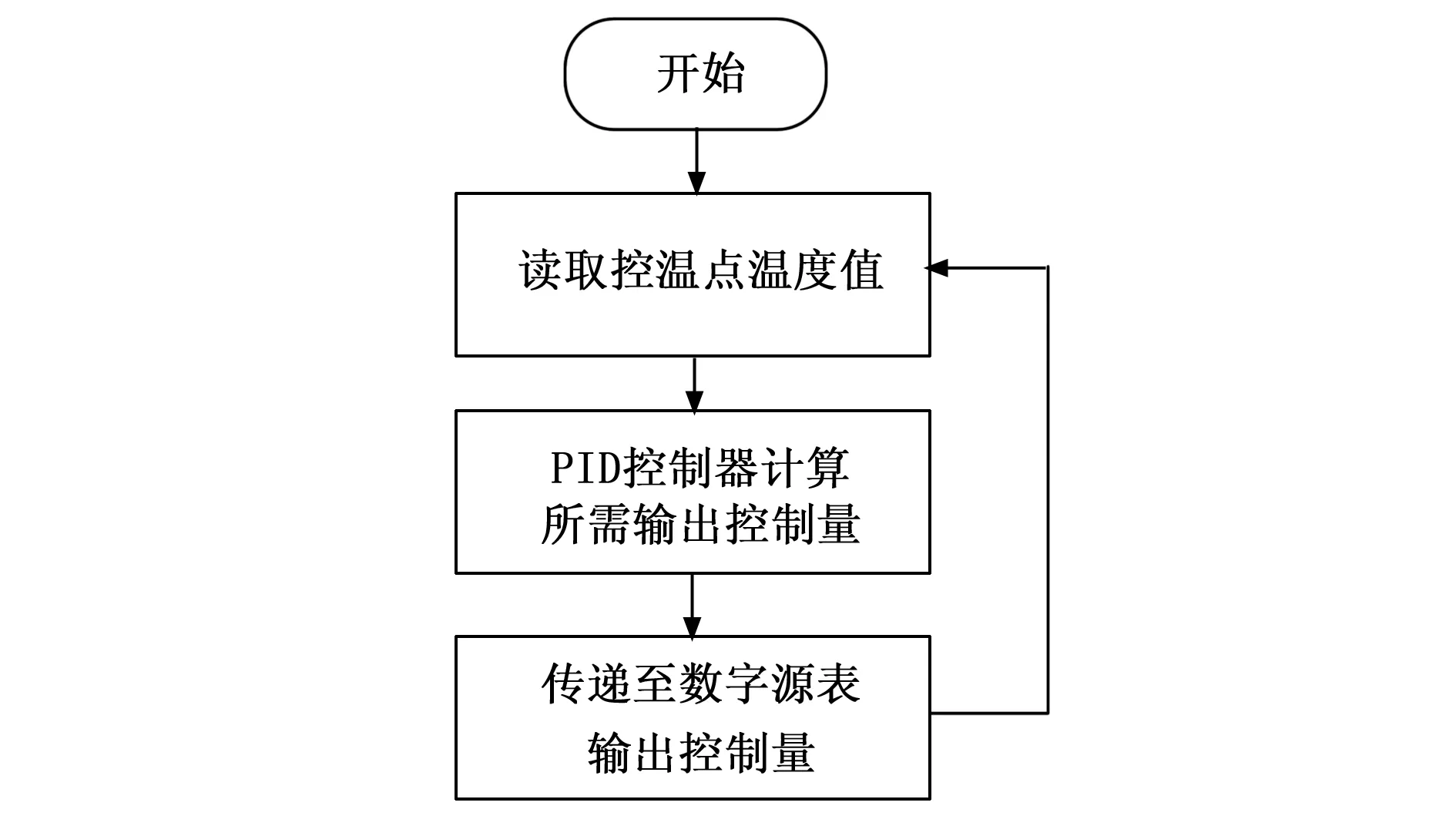
图4 控制部分流程图
完成系统软件界面如图5所示,包括“恒温参数”、“温度监测”、“系统设置”三个功能面板,分别实现恒温过程具体参数设置及反馈、关注点温度即时监测、系统通讯参数设置功能。程序具备分段恒温控制功能,各段恒温值及恒温时间可自由设置。
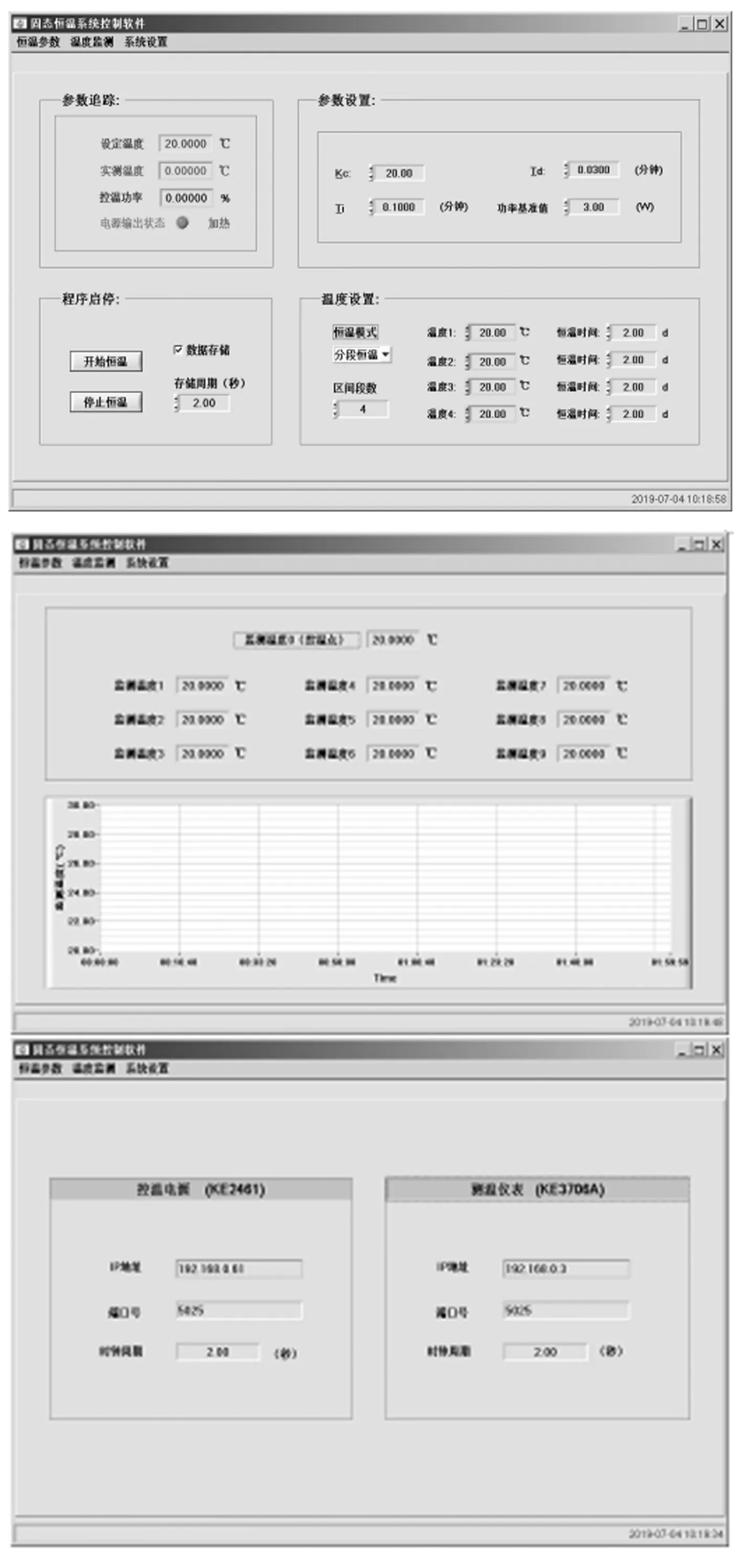
图5 软件系统界面
3.1 智能仪表嵌入式脚本编程
采用Test Script Builder编程工具,开发自定义测试脚本,并下载到仪表中,存储于其非易失性存储器内,在仪器上实时运行,有效提高系统执行速度。Keithley 2461数字源表脚本编程实现功率控制量输出,同时进行电压电流值测量;Keithley 3706A数字多功能表脚本编程主要实现多通道温度变量顺序读取及转换。
3.1.1 Keithley 2461数字源表内置脚本主程序行
1)仪表设置:
smu.measure.func = smu.FUNC_DC_VOLTAGE
//设置测量变量
smu.source.func = smu.FUNC_DC_CURRENT
//设置输出变量
smu.source.range=4
//设定源变量阈值
smu.measure.nplc=5
//设置读数频率
smu.source.vlimit.level = 20
//设置电压阈值
smu.measure.displaydigits = smu.DIGITS_6_5
//设置数据精度
smu.measure.sense = smu.SENSE_4WIRE
//设置功率元件接线方式
smu.source.output = smu.ON
//打开输出开关
2)功率控制:
KE2461CTP=buffer.make(500)
//开辟缓存
u0m=smu.measure.read(KE2461CTP)
i0m=KE2461CTP.sourcevalues[KE2461CTP.n]
//读取缓存数据
if(w0s>=0) then i0s=math.abs(w0s/u0m)
if(w0s<0) then i0s=-( math.abs(w0s/u0m) )
//制冷/制热功能判断,计算输出电流
if ( i0s>4 )then i0s=4
if ( i0s<-4 ) then i0s=-4
//源变量阈值判断,超阈值操作
smu.source.level = i0s
//输出源变量值
print(u0m,i0m,i0s)
//传递测量变量值
3.1.2 Keithley3706A数字多功能表内置脚本主程序行
dmm.func="temperature"
//设置测量功能
dmm.transducer=dmm.TEMP_FOURRTD
//设置传感器类型
dmm.rtdalpha=0.00385055
dmm.rtdbeta=0.10863
dmm.rtddelta=1.4999
dmm.rtdzero=100
//设置传感器转换参数
dmm.offsetcompensation=dmm.ON
//打开自动补偿
dmm.configure.set('RTD_PT100')
//定义设置名称
scan.create('2001:2007','RTD_PT100')
//设置巡查信息
reading_buffer=dmm.makebuffer(200)
//读取缓存
scan.scancount=1
//设置巡查次数
scan.execute(reading_buffer)
//执行巡查
printbuffer(1,7,reading_buffer)
//传递巡查数据
3.2 仪表通讯
基于TCP协议的Socket通信具有稳定可靠的优点[12-14],采用TCP Socket编程技术按仪表提供的通讯接口规范进行通信。为每台智能仪表建立一个TCP socket连接(TCP Server),通过PC端(TCP Client)进行参数设置及数据采集。客户端向服务器发送登录信息(IP地址),服务器接收到数据后校验,一致则通讯链路建立成功。通讯建立后,进行智能仪表关键参数的初始化设置以及数据获取进程。为每台智能仪表分配一个通讯时钟,用以设定其与PC客户端的通讯及数据传输频率。进一步,将通讯链路通断及仪表初始参数设置同步关联至通讯时钟,即打开通讯时钟,仪表与PC客户端通讯链路即时建立,仪表收发数据关键参数按需设置,数据传输即时启动。通讯时钟可按需设置,时钟周期在整个数据获取过程中可调,即时生效。若数据获取过程出现错误,提示故障信息并终止数据获取进程。
3.3 温度采集
Keithley3706A数字多功能表具备多个插槽,可与多款多路复用器兼容。选择Keithley3724型插卡,结合软件设计,实现总计10路温度测量功能。将所选择Pt100型铂电阻温度传感器以适当形式固定在恒温介质层,与环境之间采取适当隔离措施,以降低环境一侧对温度测量的影响。在四线制RTD测量的基础上,激活仪表电阻偏移补偿能力,以在低温段获得较高的测量精度。
温度数据采集及传输贯穿整个通讯进程,在一个通讯周期内完成所有监测点位温度数据的巡查获取。PC客户端以通讯时钟为周期定时向温度测量仪表发送数据巡查命令,仪表通过内置脚本程序执行巡查任务,取得数据后及时传输回PC客户端,客户端依据预设格式进行数据解析及数值有效性判断,舍弃无用数据后即时进行作图显示及数据存储。
3.4 功率输出
PC客户端的写定功率值来自PID控制方法的计算输出参数。通讯时钟启用后,服务器接收入口功率变量值后首先进行阈值判定,在预设阈值范围内的功率值直接送入执行段,阈值范围以外的功率值将被改写成临近阈值后送入执行段。高精度数字源表执行内置带参数的TSP脚本,自动计算出口电流值并执行输出,同时进行周期内回路实际电压、电流以及设定电流的数据采集,取得数据后及时传回PC客户端,客户端依据预设格式进行数据解析及数值有效性判断,舍弃无用数据后即时进行作图显示及数据存储。
3.5 PID控制方法
PID方法是一种具有几十年应用经验的控制算法,具有原理简单、稳定性好、适应性强、无需了解被控对象的精确数学模型等优点[15-17],在工业控制系统中已经得到了广泛的应用[18-19]。
PID系统原理如图6所示,系统主要由PID控制器和被控对象组成。比较被控对象的设定目标值r(t)与实际输出值y(t)将产生控制偏差e(t),作为一种线性控制器,PID控制器将偏差e(t)按比例(P)、积分(I)、微分(D)线性组合形成控制量u(t)。当被控系统变量的实际输出值与目标设定值存在偏差,即e(t)≠0时,PID控制器依据设定好的控制参数计算输出控制量u(t),使被控对象的实际输出值逐渐趋于设定值以达到稳定输出的目的。
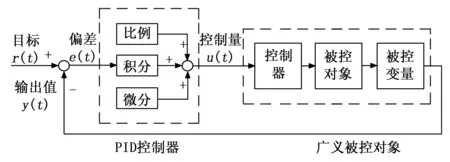
图6 PID控制原理框图
控制器的输入输出关系可描述为:

(1)
式中,e(t)=r(t)-y(t),KP为比例增益,Ti为积分时间常数,Td为微分时间常数。
本系统利用LabWindows/CVI的PID工具包,采用单输入单输出控制结构,假设被控对象实际温度为Tr,设定温度为Ts,选择实际温度与设定温度的偏差e(t)=Tr-Ts作为输入量,以施加于半导体制冷器上的换热功率P作为控制量。所采用PID控制流程如图7所示,PID控制器获取实时温度测量值,与设定温度值比较得到控制信号偏差值e(t),调用PID控制算法,计算得到输出控制量数值P。
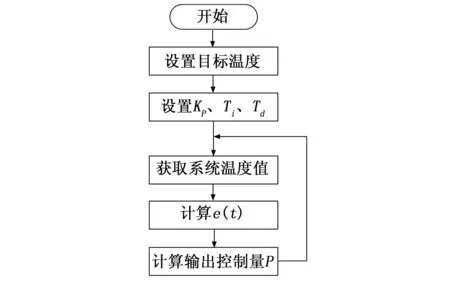
图7 PID控制过程流程图
所研究受控对象恒温层温度滞后惯性较大,PID主要控制参数Kp、Ti、Td的选取是控制器设计的关键[20]。选择试凑法进行PID参数整定:首先整定比例增益Kp,保证控制器对偏差信号的感应灵敏度;其次整定积分时间常数Ti,提高动态响应的平稳性;最后整定微分时间常数Td,预见偏差变化趋势,超前控制,降低系统超调量,同时改善动态调节速度。
4 实验结果与分析
4.1 实验步骤及方法
采用标准曲线对系统进行刻度是量热测量的基础。量热计常规运行条件为室温大气环境,为保证标准曲线的有效性,原则上制作标准曲线的刻度过程和样品测试过程的环境温度要保持一致。
为验证所设计控温系统的恒温效果,选择量热计常规恒温媒介之一—固态铝锭作为控温对象,在大气室温环境下进行控温效果测试。铝锭尺寸800 mm×400 mm×500 mm,内部中空,中空部分由2个圆柱体组成,圆形端面贴近铝锭上部水平面,尺寸φ270 mm×420 mm,铝锭总质量约300 kg。将6个Pt100型铂电阻温度传感器分别布置于铝锭外部结构的6个面,埋于相同深度(约3 mm)处,以指示铝锭不同方位的温度状态。以其中一个点位的温度作为控制变量,相应的温度数值实时传递给PID控制器。同时,在量热系统所处的环境中布置一同型温度传感器,以监测测试过程中的环境温度变化。24只半导体制冷器(片)采用阵列式结构均匀分布于恒温体各控温表面。因所对应的量热系统工作于室温,单位测量时间约24 h,因此设定控温温度20 ℃,测试时长48 h,数据采集、更新及存储周期均为2 s,以充分满足量热测试需求。
PID控制参数Kp、Ti、Td的选取是控制器设计的关键,对于某一确定的实物系统而言,PID控制器需根据被控过程的特性进行参数整定。实验选择试凑法通过如下步骤进行整定确定PID控制参数。
1) 连接好硬件线路后,首先只加入比例控制环节。逐步增大比例增益Kp,观察系统的响应速度,直至得到足够的感应灵敏度。此时系统可能产生一定范围的超调,稳定性降低,出现震荡甚至发散。如果响应速度及系统静差都在可接受范围内,则只采用纯比例调节器即可。
2) 如果比例控制系统的静差达不到设计要求,则加入积分作用。逐渐减小Ti,积分作用逐渐增强,系统静差逐渐减小,直至消除。增加积分作用后,系统超调量可能会有所增加,此时可以兼顾系统稳定性及静差消除速度,即适当增大Ti减弱积分作用,以及适当减小比例增益Kp,综合作用,减少超调。
3) 采用比例积分控制,反复调整Kp、Ti,效果仍不理想时,可适当引入微分作用。逐渐增加Td,在偏差发生较大变化前超前输出校正信号,观察超调量和稳定性,不断试凑,得到符合要求的控制参数。
进行PID参数整定时,不固定实验时长,各组测试用时以能够反馈系统调节效果为准。
4.2 结果分析
通过前述PID参数整定过程,经反复试验,选取本系统适用的PID控制参数表1所示。

表1 PID控制参数表
动态时长试验确定系统适用PID参数后,进行了长时间控温效果检测试验。实验时长48 h,结果如图8所示。实验设定控温温度20 ℃,从初始约22 ℃开始降温。实验开始PID控制器即开启制冷器全速工作模式,将恒温体热量向环境转移,给整个量热系统制冷降温。因铝锭总体量较大,系统需要近500 min完成铝锭初始热量的转运,进入到控温精度内的稳定动态平衡状态,且可以连续长时间运行且保持稳定。图8显示了实验过程中位于控温主体对象—量热计恒温体各个代表性点位的温度数据变化,可以发现,部分监测点温度传感器示值与预设控制温度存在持续性同向偏差,即部分监测点温度在实验过程中可以维持在一个稳定温度值附近,该温度值接近但同设定控温温度值存在恒定微小差异。究其原因,对于固态形式的恒温介质,无法流动,热交换能力差,导致热量在恒温体内无法十分均衡地传递及分布,使部分路径存在持续性温度梯度。无论在初始的快速热量转移阶段,还是达到控温精度内的动态平衡微调过程中,PID控制器对于系统各个部分采取完全同步及同策略的热量调控措施,因而恒温体各部分的持续性温度梯度以及所显现出来的温度差异可以稳定保持。实际上,对于量热系统而言,测量过程需要的是稳定的温度环境,而非量值绝对一致及准确的温度环境。因此,只要测量过程中所处环境温度的稳定性可以保障,恒温体各部分的持续性固定性的微小温度差异是可以为量热测量所接受的。
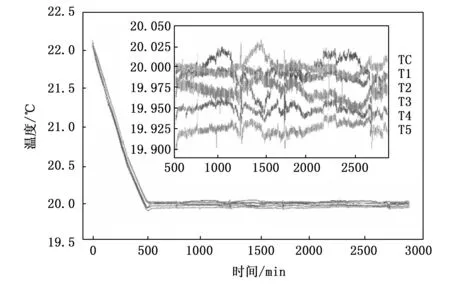
图8 控温过程温度变化曲线
图9显示了实验过程中,恒温系统所处的环境温度变化曲线,结合表2中恒温过程中位于环境温度中及布置于铝锭各个方位的监测位点温度数据,其中TMax代表测试过程中该点温度的最高值,TMin代表测试过程中该点温度的最低值,TSet即设定恒温目标值20.0 ℃,可以看出,在所处环境温度存在明显波动(±2.5 ℃)的情况下,恒温系统可以取得±0.2 ℃的控温精度,满足设计及使用要求。

图9 测试过程环境温度变化曲线
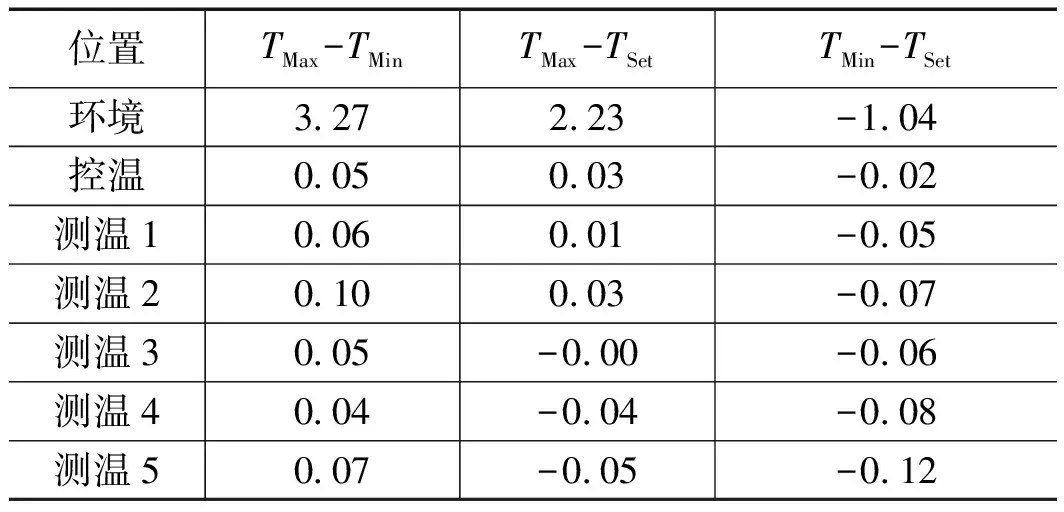
℃
上述精度结果总结于作用在固态恒温介质的实验结果之上,前已述及,因换热介质的非流动性,对于固态恒温对象的直接式控温过程,换热均匀性难以保障,经过恒温系统调控的恒温体各部分可能并非完全同步稳定在设定控温温度上,因而影响控温精度测量结果。实际上,大部分恒温系统的直接作用对象是具备流动能力的恒温介质,对于固态介质的恒温需求,也可通过引入流动性中间介质间接实现,在这些较为理想的应用场景下,本控温系统应可实现更佳的控温效果。
5 结束语
基于LabWindows/CVI虚拟仪器开发平台,采用PID控制算法,开发了数字式恒温控制系统软件,具备温度测量及功率输出控制功能,可实现多段自动化精确控温。以量热测量典型恒温介质铝锭为对象进行了恒温效果测试,结果显示,该恒温系统可获得±0.2 ℃的控温精度,符合预期设计目标。结合半导体制冷器作为热量转移元件,可方便拓展应用于多种控温需求场景。
猜你喜欢
故事作文·低年级(2021年2期)2021-02-04
中华诗词(2019年8期)2020-01-06
杂文月刊(2019年14期)2019-08-03
小天使·二年级语数英综合(2018年7期)2018-09-11
大陆桥视野·下(2017年11期)2017-10-31
科学与财富(2017年26期)2017-09-23
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14
