
高精度微波引导设备角度数据检测系统设计与实现
2022-03-30 14:02谢洪森刘云飞张建明
计算机测量与控制 2022年2期
谢洪森,王 鼎,刘云飞,张建明
(1.海军航空大学 青岛校区,山东 青岛 266041;2.中国电子科技集团公司 第二十研究所,西安 710068)
0 引言
微波引导设备主要是用于机场或移动平台实施全天候引导飞机安全起降重要的精密导航设备[1]。设备主要为飞机提供方位、仰角及距离引导信息,机载设备通过接收、处理和数据解算地面台站发射的角度(方位和仰角)引导信息,直观显示出飞机实时偏离规定的下滑航道画面,飞行员操纵飞机按照正确下滑道降落[2]。当前,保障特种飞机起降的高精度微波引导设备通常安装在固定机场或海上移动平台,安装位置、环境条件以及周边电磁干扰等多种因素会影响设备技术性能,对飞行安全造成严重影响制约,对设备发射的角度数据信息定期检测是非常必要的。国内早期研发的微波引导设备专用测角检测设备,采用的技术相对落后,体积重量大,角度测量精度低(精度劣于0.50°),无法满足特种飞机对高精度微波引导设备的角度数据检测需求[3]。
高精度微波引导设备角度数据检测系统主要基于ARM+DSP+FPGA的硬件架构设计,综合运用了高精度角度测量、嵌入式微处理器显示控制、costas数字锁相环载波跟踪与恢复等技术方法[4],设计实现了数字信号处理、模块控制和基于ARM_Linux的显示控制功能;软件设计主要基于C/C++语言编程、VHDL或Verilog硬件描述语言方式,在不同要求的运行环境下进行开发测试,实现了显示控制、信号处理、数据解算等软件设计功能[6]。通过综合调试实验以及与实装设备对接测试,试验结果表明,检测系统可以实现对高精度微波引导设备角度数据信息的检测要求,为保障特种飞机飞行起降安全发挥重要作用。
1 系统结构
系统设计主要包括主机、射频馈线以及喇叭口接收天线,其中主机由C波段接收模块、信号处理模块、显控组件、电源模块、电池组成,系统基本构成如图1所示。
喇叭口天线[7]接收C波段微波引导信号,通过二次变频输出两路信号,一路为对数视频,用于幅度解调,与数据通道配合,完成角度数据等参数测量;另一路为70 MHz中频信号,用于数据信号的解调。信号处理模块输出30 MHz的微波引导中频信号,经C波段接收模块完成检测系统自检;输出波道和衰减控制信号对C波段接收模块的接收通道实施有效选取与控制。显控组件采用防护玻璃表面镀高透低反膜(AR)的LCD液晶显示器对接收机测试数据进行显示。供电方式采取交流220 V /50 Hz或电池或外接直流电供电。系统主机对外接口设计了天线RF输入接口完成喇叭口天线接收微波引导空间信号;同步输出接口完成角度同步和数据同步信号输出[8];对数视频输出接口用于输入信号监测;USB口完成外接鼠标及测试数据的导出;LAN口完成对检测系统的在线调试;电源接口用于220 VAC交流电源和直流电的输入。

图1 角度数据检测系统主机组成框图
2 系统硬件设计
系统硬件电路设计主要包括信号处理模块、C波段接收模块、显示控制组件、系统电源与天线共5部分。
2.1 信号处理模块
信号处理模块基于ARM+DSP+FPGA的架构设计[9],实现角度数据数字信号处理、模块控制和基于ARM_Linux显示控制功能,提供LVDS、PS2、USB、网口、RS232等对外接口,电路设计为ADC、DAC、FPGA、DSP、ARM、电源、时钟7个工作单元,其组成如图2所示。模块主要完成视频信号和中频信号采样、输出中频自检信号、为外电路提供控制信号、输出同步信号和LVTTL电平标准、具备LAN口、RS-232接口与上位机通信等功能[10]。
模数转换器AD9625将输入的70 MHz中频信号转换为数字信号,并传送到FPGA单元进行处理[11]。数模转换器AD9779将FPGA输出的数字基带信号转换为模拟中频信号,并通过放大器放大到0 dBm输出,输出设计采用一个1∶1的巴伦来完成。FPGA选用XC7K325T-2FFG900I,采用Master SPI配置模式,M[2:0]=001,按照x4总线宽度进行设计,产生控制逻辑,发送基带信号,接收预处理中频信号、视频信号。同步信号由FPGA产生,经驱动器隔离后输出,电平标准为LVTTL3.3 V。

图2 信号处理模块总体框图
DSP为信号处理算法主体,选用定浮点DSP TMS320C6657,对FPGA预处理的数据进行分析、计算[12]。DSP上电后至输入时钟及PLL稳定,释放复位管脚,DSP在复位管脚的上升沿时采集模式管脚BOOTMODE[2:0]的状态,采用SPI BOOT模式,当DSP采样BOOTMODE[2:0]=110时,读取外部SPI FLASH的数据进行加载启动,DSP时钟设计为1 000 MHz。
ARM选用NXP的iMX6Q MCIMX6Q6AVT10AC,主要与机箱上的键盘、显示屏等协作,实现人机交互界面。外围包含DDR3、EMMC、RTC、温度传感器、SSD、USB、以太网、RS232、RS422等。设计采用8bit EMMC Boot,启动的SD接口为SD4。时钟为典型频率为24 MHz和32.768 kHz。
电源单元主要是将外部输入的+5V电源转换为各个芯片的工作电压以及电源的上电时序控制。系统整体上电时序:单板上电后,ARM先启动,ARM启动后控制FPGA和DSP启动,FPGA和DSP按照各自的上电时序启动。
2.3 C波段接收模块
C波段接收模块主要由接收通道、控制单元、本振1、本振2、自检模块、电源单元等组成[13],主要功能是通过二次变频输出两路信号,一路对数视频,一路70 MHz中频信号,组成如图3所示。
接收通道接收输入C波段微波引导角度数据信号,经滤波、限幅放大后进行混频,输出510 MHz的第一中频信号,第一中频信号通过滤波放大后进行二次混频,产生70 MHz的第二中频信号[14]。控制单元接收外部的1路SPI通信和波道、自检、衰减等控制码,完成对各个单元的控制,并向外部反馈本振1的频率锁定指示信息[15]。本振1生成一本振信号配合接收通道实现变频和BITE设计,并反馈至外部;本振2模块输出580 MHz点频,配合接收通道实现变频;外部参考输入自检模块后,生成自检信号输入到接收通道中;电源单元为其他单元提供指定电压的直流电源。

图3 C波段接收模块组成框图
2.2 显示控制组件
显控组件由接口信号处理模块、7英寸液晶屏显示模组、按键导光板模块、面板组件等部分组成。
整体结构采用了模块化、内嵌功能按键、背光驱动集成设计,具备上、下、左、右共4个方面可视角度达到85°宽视角显示功能,支持网络接口、RS232接口、USB、视频信号输出及宽电压输入等,支持26个用户定义按键和不同种类外设需求;提供人机交互接口,通过串口实现与主板通信;接口信号处理板接收上位机输出的LVDS信号,经解码器解码成TTL电平,编码器编码为VGA信号,视频处理芯片采集VGA信号,通过LVDS视频信号送显示屏进行显示[16]。
2.4 系统电源
系统电源采用交流和直流两种供电方式,供电优先等级为:AC供电>外部直流供电>锂电池供电,单相AC220 V/50 Hz电压通过AC/DC变换后给锂电池单元内的+14.4 V锂离子蓄电池组充电,后经DC/DC变换后,输出稳定的+5 V、+12 V直流电压给系统供电。系统电源设计具备交流输入过欠压、过温以及输出短路保护等功能。
2.5 天线
角度数据测量接收天线设计采用喇叭口型天线,频率范围为5.0~5.1 GHz,增益≥8 dB,阻抗50 Ω,垂直极化方式,驻波≤2.0。
3 系统软件设计
软件设计主要由显示控制软件、信号处理软件两大部分构成[17]。显示与控制软件运行平台为ARM处理,采用C/C++语言进行编程,基于Qt环境下进行开发调试;DSP软件采用C语言和汇编语言相结合的方式编程,在CCS环境下调试;FPGA信号处理软件采用VHDL或Verilog语言开发,在ISE环境下调试。
3.1 显示控制软件
显示控制软件主要实现界面参数的设置及测试数据的显示、键盘信号接收与处理、测试数据存储和读取[18],显控界面的设计如图4所示。
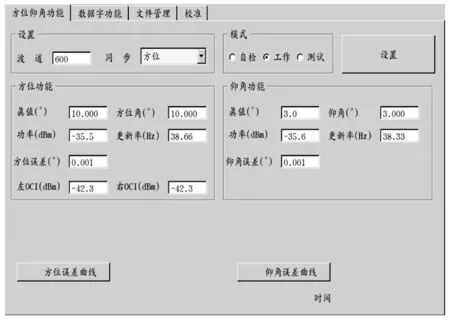
图4 角度数据测试功能显示界面
方位仰角功能主要通过输入方位、仰角真值,实现实时测量显示微波引导扫描信号功率和更新率,点击方位、仰角误差图形按钮,可显示实时的方位、仰角角误差曲线,设计流程如图5所示。

图5 方位仰角功能流程图
数据字功能是通过键盘实现基本数据字及辅助数据字测试内容的循环切换,支持基本数据字1~6、辅助数据字A1~A3、B40~B45等[19]。对定义的数据字,可解析出相应的数据字内容,测量出信号功率及更新率;对于未定义的辅助数据字,在“备用辅助数据字”中进行解调、显示,软件设计流程如图6所示。
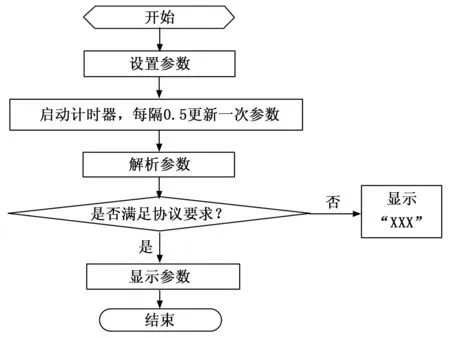
图6 数据字功能流程图

图7 信号处理流程图
文件管理功能主要完成对测试数据文件进行管理,测试数据需存储时,通过设置存储时间长度,对方位、仰角数据进行存储,存储的数据可在测试接收中进行回放。支持用户选择存储时间:1分钟、2分钟、5分钟和10分钟,数据存储自动生成以当前时间为文件名的CSV格式文件。校准功能主要完成扫描信号、数据信号功率的校准补偿,各补偿值能够存储在设备中。
3.2 信号处理软件
信号处理软件功能包括数据解调、幅度及角度解调两部分[20]。射频前端输出的70 MHz限幅中频信号,经40 MHz的带通采样转换为数字中频信号,经带宽为120 kHz的带通滤波器滤出10 MHz信号,由数字下变频输出800 kHz信号,为减轻信号处理压力进行4倍抽取,将信号数据率降为10 MHz,设计中采用数字costas锁相环技术实现载波恢复与跟踪,完成数据基带信号的解算。为提高系统的测试精度,设计中采用相干解调方式实现DPSK信号的解调。相干解调后的信号是绝对码,通过软件设计实现绝对码-相对码的变换。若绝对码记为bk,相对码记为ak,则绝对码-相对码之间的关系为:ak=bk⊕bk-1。解调出的数据基带信号,通过相关运算,数据信息解差分,获得功能码、基本数据字和辅助数据字的相关信息。接收前端输出的微波引导信息包络信号,经A/D采样及26 kHz带通滤波,与数据解调配合,解调出仰角、方位、扫描功率信息,从而实现幅度及角度解调。容的识别、信息校验、显示输出等工作,其流程如图7所示。
4 实验结果与分析
角度数据检测系统研发完成后,利用某部机场微波引导设备进行了检测试验与数据测试验证。按照相关标准规定及系统测试要求,喇叭口接收天线架设选择距离高精度微波引导设备400 m、方位天线相位中心±20°覆盖区域内,架设高度在4.5~30 m之间可调整,预先确定了典型角度信号接收测试点作为标定点,应用光学全站仪精确测量测试点的微波引导设备方位和仰角天线相位中心方位角和仰角数据,作为方位、仰角以及数据信息的标定值。
按照检测系统界面操作与检测使用程序方法步骤,将系统喇叭口接收天线、射频测试电缆与系统主机正确连接,选取与微波引导设备测角功能设备相同的500、600、699三个典型波道,在角功能界面设置波道、方位角真值、仰角真值,对微波引导测角设备发射的方位角、仰角及数据信号信息进行现地测试,并将测试的方位角、仰角数据与标定数据进行比对。
测试结果如表1、表2和表3所示。实测结果表明:方位角测试精度不劣于±0.16°,仰角测试精度不劣于±0.18°,测试结果满足角度检测系统的技术指标要求;测试的数据信号与微波引导测角设备发射的数据信息一致,验证了检测系统功能、性能的有效性和准确性。

表1 检测系统方位角实测数据记录表

表2 检测系统仰角实测数据记录表

表3 检测系统数据字实测记录表
5 结束语
高精度微波引导设备角度数据检测系统采用最新数字化、模块化、小型化技术设计,实现对高精度微波引导设备发射的空间信号的接收、处理、解算、测量,准确判断微波引导设备的主要功能和技术性能。检测系统在实装环境下现场对接实验与数据测试,实验结果表明:系统方位角测量精度不劣于±0.16°,仰角精度不劣于±0.18°,满足了系统角度数据指标测量要求,验证了系统测试的数据信号与微波引导测角设备发射数据基本信息的一致性,有效提升高精度微波引导装备定检及故障维修能力,对提高飞行安全保障能力具有重要意义。
猜你喜欢
包装工程(2022年9期)2022-05-13
初中生世界·九年级(2020年2期)2020-04-10
红领巾·探索(2018年12期)2018-01-26
美食堂(2017年8期)2017-08-14
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12
