
城市轨道交通列车自主运行系统优势浅析与探讨
2022-03-30 01:54:08王艳伟马超刘汪洋
交通科技与管理 2022年5期
关键词:信号系统
王艳伟 马超 刘汪洋


摘要 列车自主运行系统作为以车车之间通信为理念的全新信号控制系统,在当前日益蓬勃发展的城市轨道交通行业中,系统优势突出。结合传统CBTC信号系统和TACS系统软硬件差异,并以城市轨道交通运营线路存在的典型问题为例,对TACS系统的系统架构和关键系统优势进行了解读。结合现有经验,对系统优势进行了量化分析。
关键词 列车自主运行系统;信号系统;移动授权;移动闭塞;车车通信
中图分类号 U284.48 文献标识码 A 文章编号 2096-8949(2022)05-0001-03
0 概述
近年来,随着城市轨道交通行业的快速发展,传统CBTC系统技术的逐步成熟,对于信号系统的智能化、轻型化、便捷性及低成本等方面提出了更高的要求。
为解决以上痛点,由中国第一个具有完全自主知识产权的列车自主运行系统(以下简称“TACS系统”)信号系统应运而生。TACS系统采用一种全新的信号系统控制理念,是以列车为核心,基于车车通信,采用资源管理的理念,以信号车辆深度融合为特征,实现列车运行方式由自动化向自主化转变的一种全新系统制式[1]。相比于传统CBTC系统,系统技术优势明显。
TACS系统是在技术创新上真正实现国际引领的列车运行控制系统,实现了中国轨道交通装备从跟跑、并跑到领跑的跨越,揭开了中国城轨列车运行控制领域的崭新一页,将有效提升中国城轨装备的国际竞争力。
目前,TACS系统已在国内首次实现车辆和信号的深度融合,显著提高城市轨道交通列控系统的智能化水平。
1 系统构成
TACS系统相比传统CBTC系统,在设备构成上进行了精简。按照设备所属的区域划分,主要包括车载设备和轨旁设备两大部分[2]。
1.1 车载设备
车载设备主要包括OBC(车载控制器)、速度传感器、应答器读取单元、无线天线、列车显示器等。与传统CBTC系统相比,硬件配置没有变化。主要车载控制器的系统软件及接口协议有所增加。
1.2 轨旁设备
轨旁设备主要包括车站设备、车辆段设备、控制中心设备。与传统CBTC系统相比,轨旁设备OC(地面目标控制器)替代原来的ZC(区域控制器)和CBI(联锁),并取消了ATS站机。将传统 CBTC系统中CBI和ZC设备的功能集成到了TACS 系统的OBC中,通过前后列车之间的通信去实现列车主动进路和列车自主防护的功能交互。
2 系统原理
TACS系统通过列车之间的直接通信方式实现列车自主进路、自主防护、自主运行、自主调整的直接自主控制[3-5]。与传统CBTC系统的基于ZC管理列车及间隔防护,CC主动运行控制和防护,与ZC间接控制列车的控制方式相比,减少了控制节点,并提升运行能力,自主运行控制为智能、智慧提供了基础底盘。
TACS系统控制流程如下:
(1)ATS下发时刻表或实时人工进路命令。
(2)注册列车并查询资源。
(3)OC负责登记列车并转发资源登记信息。
(4)列车向前车申请资源。
(5)前车释放资源,并在OC更新登记实体资源。
3 系统优势
TACS系统相比于传统CBTC系统,主要有资源离散、功能内聚、自主自律、弱中心化等系统优势。结合传统CBTC系统和TACS系统的架构和逻辑差异对比,从以下几个方面,对TACS系统关键优势进行了分析探究。
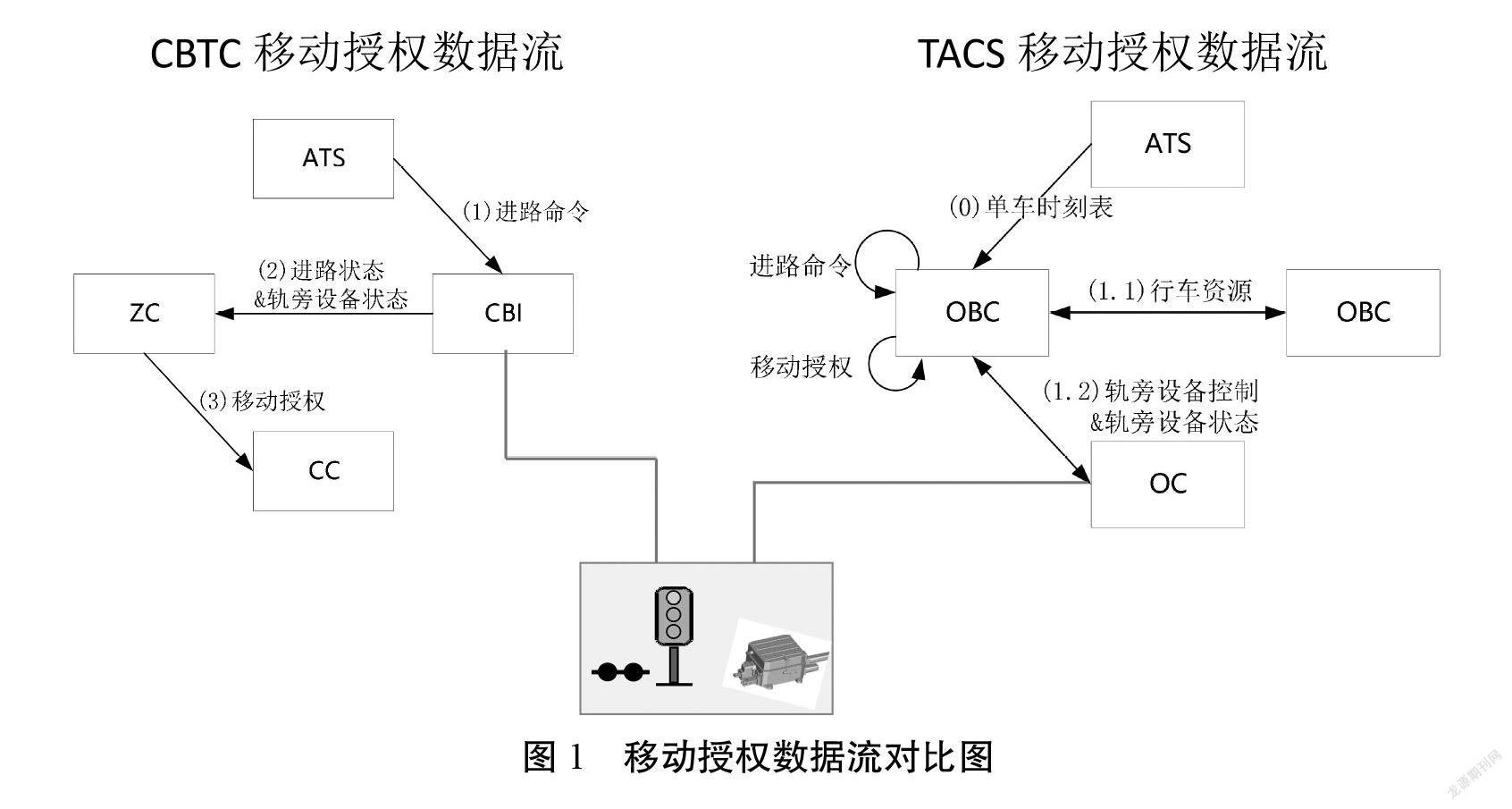
3.1 扁平化架构缩短控制链路
TACS系统对移动闭塞追踪控制的数据流进行了调整,移动授权数据流对比如图1所示,减少控制链路级联,一定程度上提升系统响应性能及系统安全性,并且缩短了追踪间隔。
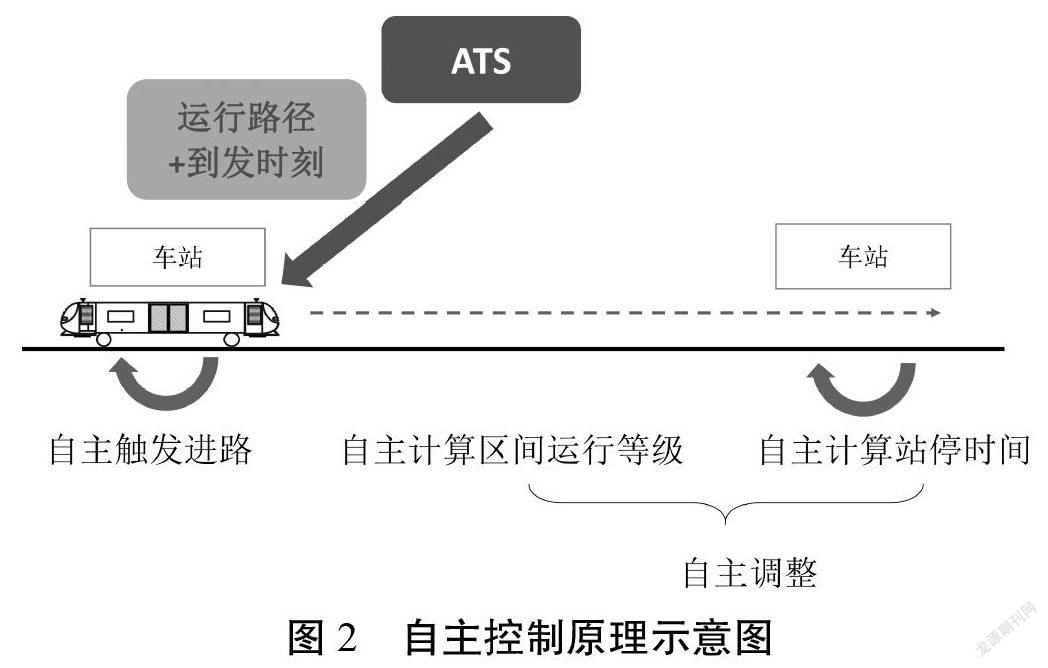
3.2 自主进路、自主防护、自主调整
从列车智能化程度来讲,TACS列车相对于CBTC列车更“聪明”,车车通信,具备自主进路、自主防护、自动驾驶和自主调整功能。 自主控制原理示意图如图2所示。
(1)自主进路:列车自主下载本车运行计划,并采用基于資源管理的安全策略,保证进路安全。
(2)自主防护:列车根据获取资源等信息,动态计算移动授权,实现自主防护。
(3)自主调整:基于车载运行时刻表,在一定范围内实现列车自主调整功能。
3.3 站台连续追踪
TACS系统在进行列车追踪时,前车已经启动,且出清站台后,后车就可判断前车的移动授权长度可以正常使用,此时,后车可联系追踪前车进入站台。根据IEEE1474,1—6.2所述, ATO在ATP防护下,应控制列车不使其在仅部分进入站台时停车[6],基于此进行测算,TACS系统的站台追踪间隔可提升10%以上。
3.4 灵活的进路控制
TACS系统是基于资源占用移动授权,不依赖于进路锁闭,因此列车移动授权的方向取决于列车的方向,以列车为始端,可建立任意方向和终点的进路,且移动闭塞是可以任意移动的[7]。鉴于此控制策略,可在如下几种场景中进行更加灵活的进路控制。
3.4.1 临时交路运行
TACS系统在进行临时交路运行控制时,具备如下两个优势,在图3中进行示意。
(1)任意站台,任意路径,不需要提前布置双向出站信号机。
(2)双向移动闭塞方式运行,临站发车无任何约束。
3.4.2 区间紧急退行
TACS系统在进行区间紧急退行时,具备如下两个优势,在图4中进行了示意。
(1)全过程FAM模式运行,系统保障安全;而在传统CBTC系统下需要以RM/EUM模式逆行,人工防护。
(2)区间单车情况下,可缩短故障处理时间到原先的1/4~1/3;在多车情况下,处置效率提升更加明显。
3.4.3 工程车作业
根据工程车是否装备了TACS系统的车载控制系统,TACS系统在进行系统防护时,采用了不同的策略:
(1)对于未装备TACS车载控制系统的工程车,工程车可基于降级进路的方式运行。TACS系統基于自主控制优势,可以对作业的工程车进行灵活的安全防护。
(2)对于装备TACS车载控制系统的工程车,可以充分发挥TACS系统灵活进路的特点。在系统防护下,可以最高允许速度运行,大大提升作业效率;可在任意位置进行折返,排列任意进路,作业灵活性大大提升。尤其对于线路长、区间大的市域等线路,系统的优势更加明显。
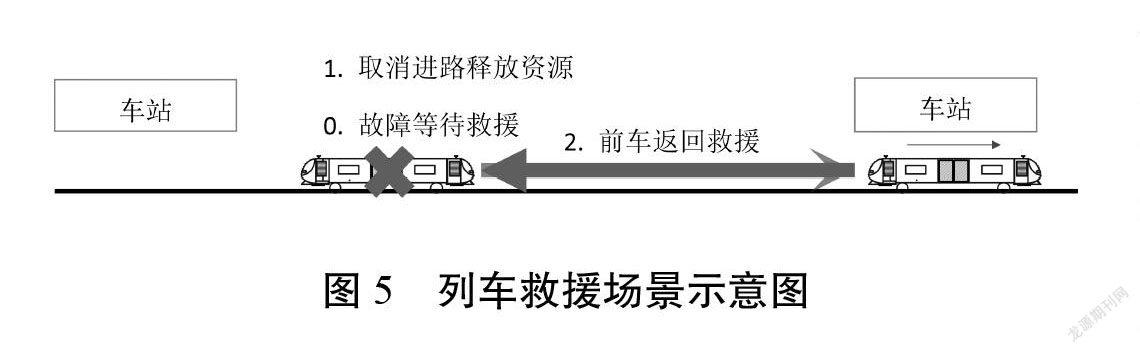
3.4.4 列车救援
当车辆正线出现故障等需要进行紧急救援时,TACS系统可以释放所有占用资源,方便其他列车接近。救援列车可以在TACS系统的防护下,以最高运行速度接近救援列车。在列车完成连挂后,仍可以按照RM模式的方式进行驾驶。后车只需要间隔一个计轴区段。如图5所示,为系统救援场景的示意图。
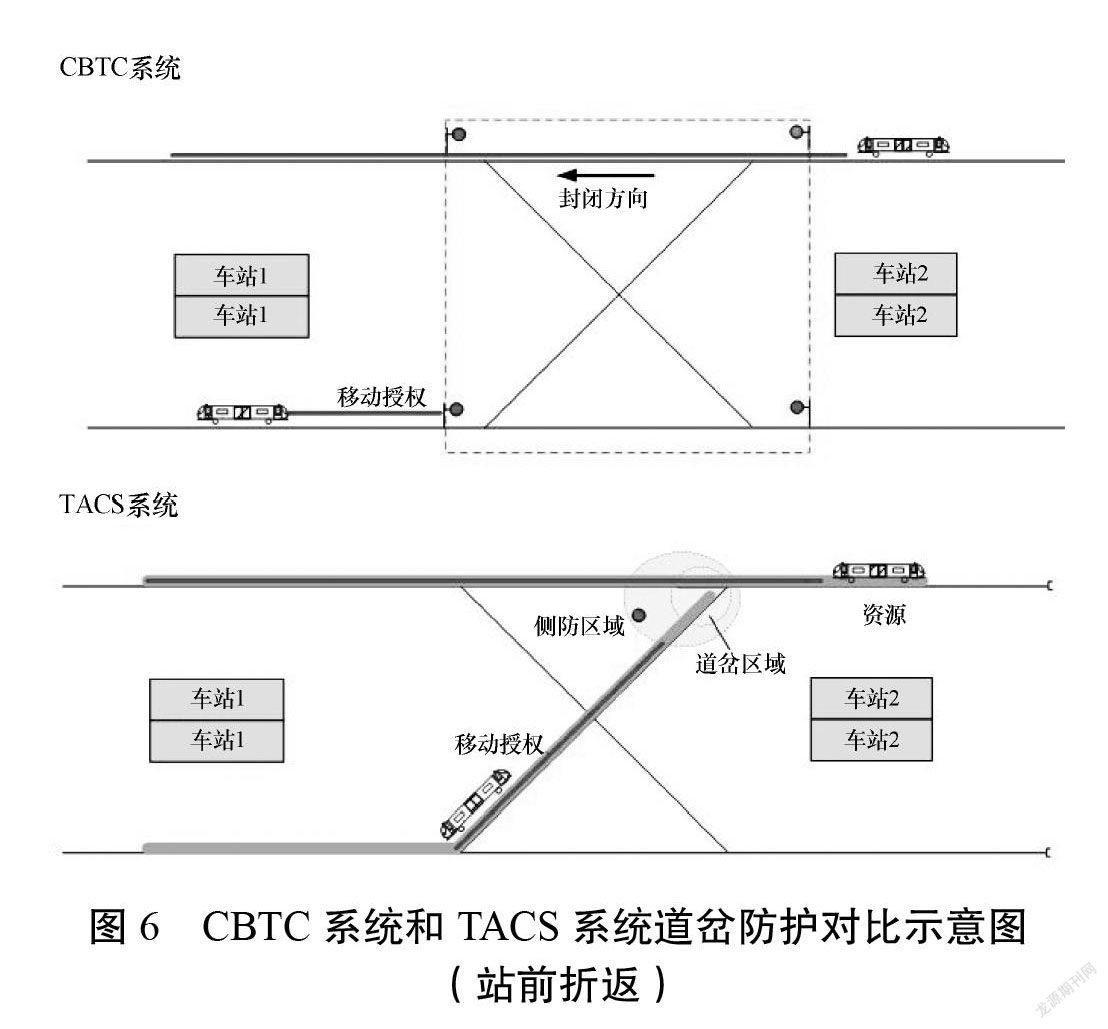
3.5 道岔的利用和防护
TACS系统采用道岔资源离散化管理和独立的功能防护,在进路控制时更加灵活,可以有效提升系统站前折返间隔效率[8]。如图6所示,TACS系统与CBTC系统在进行站前折返时的道岔侧防策略对比示意图,TACS系统采用移动闭塞策略,而传统CBTC系统采用整体锁闭策略。TACS系统的移动闭塞策略,在进行站台折返时,可将站前折返效率提升15%~20%。
3.6 弱中心化
TACS系统采用更趋分散的控制,区域设备少,有更高的系统可用性。进路和移动授权功能的上车,将系统故障由面故障降低为点故障,系统可用性可提升0.01%左右。
基于资源分散管理和车载功能高内聚,车地接口和逻辑大幅简化;取消了轨旁区域控制器,消除了分区控制间的跨区控制移交和区域间的耦合。
取消了传统CBTC设计联锁控制区域和区域控制器控制区域的划分,以及在区域控制器控制交叠区内复杂的控制移交过程。TAC跨区、跨线无重叠区,互联互通实现以及延伸线接入设计及调试更简单。
3.7 电子地图下地
传统CBTC系统架构,车载控制器需存储线网所有线路的电子地图,电子地图成为互联互通线路关键耦合点。任意一条线路中有电子地图的变更,其他互联互通线路都要进行软件修改。从而增加软件修改、测试、安全认证和升级等一系列工作。重庆互联互通线路是国内互联互通线路试点规划城市[9],根据重庆互联互通线路开通后的运行情况,基本上90%以上的信号系统软件升级的事由,是因有延伸线接入,数据修正引起的。
TACS系统电子地图由轨旁OC通过无线通信发送至车载控制器,且不受限于线网规模,更易于实现线网内的互联互通运行。列车在进入OC控区后会先请求并下载此OC控区的电子地图。电子地图与线路物理区域耦合,使得系统不受线路分段接入或个别区域线路数据修改的影响。
4 结束语
TACS系统自身具备智能、安全、可靠、高效、灵活、互联互通、便捷改造等诸多优势,一定程度上降低了国家对于城市轨道交通基础建设的总体投资,同时提升了城市轨道交通整体服务质量。对这一新型列车自主运行系统的全面推广应用,势必会助推中国城市轨道交通的高质量发展。
参考文献
[1]王鹏. 车-车通信技术在列控系统车载设备中的应用研究[D]. 北京:北京交通大学, 2017.
[2]孔军, 宋丹. 城市轨道交通车-车通信系统融合设计[J]. 现代城市轨道交通, 2021(9): 13-17.
[3]汪小勇. 城市轨道交通基于车-车通信的列车自主运行系统探讨[J]. 中国铁路, 2020(9): 77-81.
[4]罗情平, 吴昊, 陈丽君. 基于车-车通信的列车自主运行系统研究[J]. 城市轨道交通研究, 2018(7): 46-49.
[5]郜洪民, 宾海丰, 付连著. 我国城市轨道交通信号技术自主化发展策略探讨[J]. 城市轨道交通研究, 2012,15(4): 4-7.
[6]Ahmed Miske El Hadrami, 刘会明. 轨道交通的自主化列车控制和自主化运营[J]. 城市轨道交通研究, 2018(5): 37-39.
[7]温杜仲. 基于车-车通信技术的新型城市轨道交通信号系统研究[J]. 中国新通信, 2016(24): 122-123.
[8]郑艺, 张韦, 沈涛, 等. 基于车-车通信的CBTC系统自动折返方案[J]. 控制与信息技术, 2019(5): 68-71.
[9]李中浩. 城市轨道交通 CBTC互联互通发展趋势及建议[J]. 城市轨道交通研究, 2018(5): 12-15.
猜你喜欢
铁道通信信号(2020年5期)2020-09-21 09:22:00
铁道通信信号(2020年1期)2020-09-21 08:55:18
铁道通信信号(2020年8期)2020-02-06 09:13:44
铁道通信信号(2019年5期)2019-10-10 05:03:00
铁道通信信号(2019年2期)2019-03-26 06:39:48
铁道通信信号(2018年12期)2019-01-31 05:36:46
铁道通信信号(2018年7期)2018-08-29 01:17:06
铁道通信信号(2018年1期)2018-06-06 02:27:35
铁道通信信号(2016年11期)2016-06-01 12:11:22
铁道通信信号(2016年10期)2016-06-01 12:10:59
