
自动化樱桃采摘收集系统设计
2022-03-29 21:49:29张爱云
机电信息 2022年5期

摘要:设计了一种小型的自动化水果农用机械,能够自动夹持并振动长满成熟樱桃的果枝,并通过一种类似雨伞的可收放机械收集机构,收集振动掉落的樱桃熟果。
关键词:樱桃采摘;振动果枝;伞状收集器;自动化农业机械
中图分类号:TH69 文献标志码:A 文章编号:1671-0797(2022)05-0037-03
DOI:10.19514/j.cnki.cn32-1628/tm.2022.05.010
引言
包含車厘子等在内的广义的樱桃类浆果,是世界各国常见的一种备受欢迎的水果。樱桃的采摘所耗费的成本可达到总生产成本的40%左右,传统的人工采摘费时费力,人工费用很高。而自动化的采摘机械可提高樱桃果树的采摘效率,还有利于林果类公司向智能化转型[1]。
樱桃的自动化采摘机械,在农业上应用最广泛的是德国。目前有据可查的德国最先进的樱桃采摘机,是一种由拖拉机或其他小型内燃机农用运输设备拖动的分解动力机械。农用车辆在停车挂空挡后,内燃机可以通过机械换挡,先后分解动力到两个独立的部分:收集器和振动臂。德国樱桃采摘机收集器比较简单,类似于中国古代书生的折纸扇,收集器由若干可旋转的扇骨覆以可拉伸和收卷的尼龙布组成。内燃机正转带动扇形收集器围绕樱桃树主树干展开,内燃机反转可以收回扇骨及承接尼龙布。德国樱桃采摘机收集器展开后,内燃机动力切换至振动大臂。振动臂采用人手工操作刚性机械大臂夹持樱桃树主干,车辆马达产生动力振动树干,树干的高频振动可使成熟的樱桃掉落至承接收集器。但研究发现,这种收集器的设计不适用于较高的樱桃树,而且振动树干会对樱桃树的寿命产生影响。
1 振动式采摘机械的研究现状
目前,林果业广泛采用振动式机械进行果实采摘,采摘效率大约是人工采摘的10倍[2]。
振动式机械采摘的基本原理:振动装置夹持果树树干,树干在外力作用下做加速运动,果树受到惯性力开始做振摇运动,同时将力传递到果实和枝干的连接处,当连接处断裂时,果实就从果树脱落。
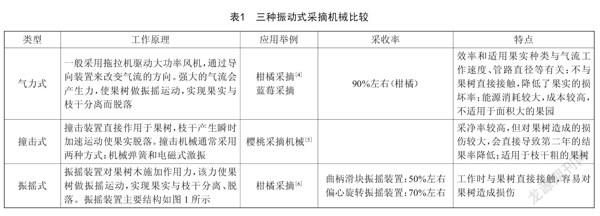
根据振动装置结构的不同,采摘机械主要有以下3种类型[3]:气力式、撞击式和振摇式。不同类型采摘机械的特点如表1所示。
2 一种新的樱桃采摘机设计原理分析
樱桃树结果特点如下:
(1)樱桃果距离地面高度一般在1.5~3 m,如果有合适的承接机构,下落高度也就是1 m左右。
(2)樱桃果成熟时很容易自动掉落,因此收集时只需低频振动树干即可采摘大部分熟果,而且振动力量不用太大,不会伤及树干。
(3)刚采摘的樱桃有一定的防撞性,轻微的碰撞一般不会对水果质量产生损害。
因此,本设计仍分为收集器和振动器两部分,但改善了机械设计结构。
3 樱桃枝采摘机的收集器设计
樱桃收集器可以参照一个反状雨伞设计,但分为左右两部分,更方便受果、卸果。图2所示为樱桃滑块连杆摆杆式收集器完全打开的状态,原理同一般的雨伞结构,但是修改建模了新的滑块—连杆—摆杆机构,使收集器张开时更像一把反向张开的雨伞。
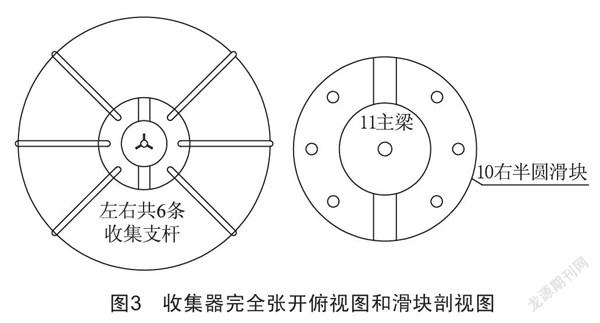
图2中,收集器由左、右升降液压缸5和6分别带动左、右升降液压臂7和8,推动左半圆滑块和右半圆滑块10上下运动。如图2、图3所示,左、右滑块呈半圆环状态,抱在收集器的主梁11上,在液压动力下做上下运动。每个滑块各有三组推力杆12,通过三组滑块固定绞支链13与左、右半圆滑块相连。同时推力杆12又通过移动绞支链15与收集支杆16相连。收集支杆16又通过主梁固定绞支链17连在主梁11上来回转动。主梁11上端和收集支杆16上覆盖一层与雨伞布构造类似的塑料或减振尼龙布18。
4 樱桃枝采摘机的振动器设计
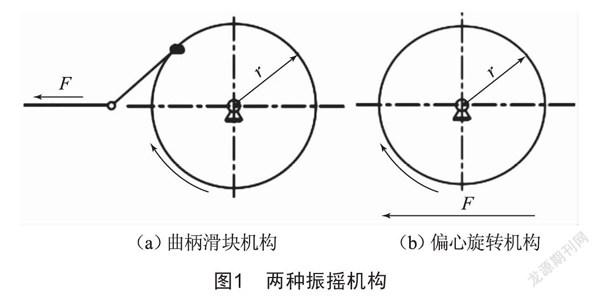
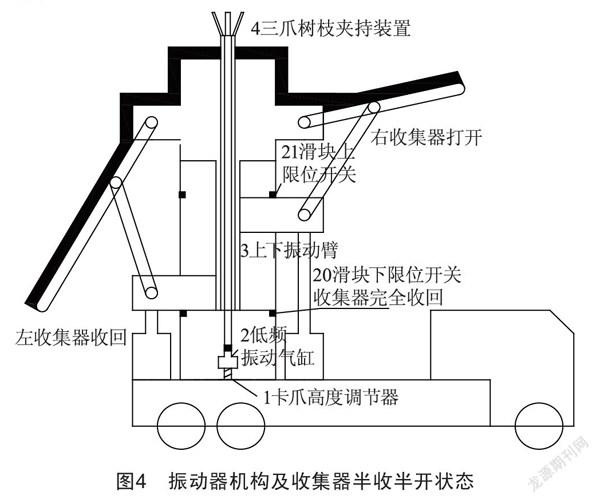
果枝振动器采用车辆操作员手动调整的方式对准采摘位置,手动调节振动臂的高度后车辆马达产生振动力。不同于德国设计,本文振动器振动的对象是樱桃树的主枝,而不是树木的主干。振动器由图4中卡爪高度调节器1(可调节振动臂的伸出高度)、低频振动气缸2(马达驱动其左右伸缩振动5次/s)、上下振动臂3(刚性轴杆)、三爪树枝夹持装置4组成,可自选夹持樱桃枝结构。
当农用车开到樱桃树下合适位置时,操作者手动操作卡爪高度调节器1将三爪树枝夹持装置4对准要夹持的樱桃树主枝高度。首先操作收集器至完全张开,以便承接收集;然后车辆马达挂空挡可以转接动力至低频振动气缸2,通过上下振动臂3带动三爪树枝夹持装置4夹持樱桃树主枝上下振动,以达到脱果的效果。
5 系统设计功能分析
如图2至图4所示,本系统有两组三个气压驱动装置,可以采用一个动力源,如农用车马达。原理如下:农用车停车后,首先操作者手动操作气动缸升降器将三爪树枝夹持装置对准要夹持的樱桃树主枝,然后利用农用车空挡马达带动左、右两个升降液压缸,同时推动左半圆滑块和右半圆滑块向上运动;当左右滑块到达滑块上限位开关21时,液压缸停止工作,此时推力杆上推支杆带动雨伞状减振尼龙布完全打开呈收集状态;此后操作者切换农用车马达带动振动器气缸做上下活塞运动,开始振动樱桃果枝,采摘收集熟果。
当樱桃果振动收集完成后,农用车马达换挡振动器气缸至带动左升降液压缸向下首先回收,如图4所示,收集器左气缸处于回收状态,右气缸处于伸张状态。左滑块下降到行程下限开关20,右滑块上升到行程上限开关21。当左升降液压缸下降至滑块下限位开关20时,左边三组减振布收集器折叠回收完成,而收集器右边部分继续在上限开关处,呈收集张开状态。在左半部分回收时,大部分樱桃自动从收集器滑落。此处需要用户自行安排收集装箱设备,也可以采用人力或其他自动化设备,将收集器内收集的樱桃倒出。同理,左半部分收集器整理完成后,右半部分气缸回收,将所有收集器内的樱桃倒出。
6 结语
樱桃引进中国后已久经栽培,改革开放后,在市场经济体制下,国内引进的品种颇多且不断变化,但果实的大小区别不大。除了供食用外,櫻桃果也可酿樱桃酒,枝、叶、根、花还可供药用[7],还可将收集过程中有破损的樱桃加工制作成樱桃酱、樱桃汁和果脯。在很多地方,樱桃是高档菜肴配料。仅仅在山东烟台,自2011年开始,就在连续的4年内打造了16个市级大樱桃示范基地,建设了2个农业部“菜篮子”标准化生产示范基地。2016年,烟台大樱桃栽培面积达205 km2(30.8万亩),居中国第二位,产量17.6万t,居中国第一位,因此樱桃的农用机械有着较高的开发价值。
[参考文献]
[1] 李明禹.大连永昌樱桃园观光采摘旅游现状及发展对策[J].中外企业家,2018(29):204-205.
[2] 汤智辉,孟祥金,沈从举,等.机械振动式林果采收机的设计与试验研究[J].农机化研究,2010,32(8):65-69.
[3] 陈泽斌.振动式林果采收技术的研究现状[J].机械工程师,2021(1):21-24.
[4] JUTRAS P J,COPPOCK G E.Harvesting Citrus Fruit with an Oscillating Air Blast[J].Transactions of the ASAE,1963,6(3):192-194.
[5] PETERSON D L,WHITING M D,WOLFORD S D.Fresh- Market Quality Tree Fruit Harvester Part I:Sweet Cherry[J].Applied Engineering in Agriculture,2003,19(5):539-543.
[6] WHITNEY J D,CHURCHILL D B,HEDDEN S L,et al.Trunk Shakers for Citrus Harvesting Part I:Measured Trunk Shaker and Tree Trunk Motion[J].Applied Engineering in Agriculture,1988,4(2):93-101.
[7] 李振铭.烟台樱桃品牌化策略研究[D].广州:华南理工大学,2018.
收稿日期:2021-12-27
作者简介:张爱云(1980—),女,山东东阿人,工学硕士,研究方向:机电设备技术。
