采空区三维激光扫描信息可视化集成系统设计及应用
2022-03-28 17:16:52谭浪浪
黄金 2022年3期




摘要:为了更好地对采空区三维数据进行有效建模分析,开展采空区三维激光扫描信息可视化集成系统研发。在核心算法的基础上对点云进行过滤分析处理,保证建模的精度和速度。采用CVIS这一专门用于采空区三维激光扫描空间信息处理的系统,Windows开发平台,Visual C++开发环境,以及OpenGL开放性接口进行开发。通过对研发的系统进行测试,系统具有良好的稳定性和可靠性,适应性强。系统将在现有基础上进一步集成处理采空区相关监测数据、采空区稳定性分析等功能,大幅度实现了对采空区的安全性评价和预警。
关键词:采空区;三维建模;集成系统;点云处理;稳定性
中图分类号:TD679 文章编号:1001-1277(2022)03-0044-06
文献标志码:Adoi:10.11792/hj20220310
引 言
矿产资源地下开采形成的采空区是危及矿山安全生产的主要灾源之一。有效实施采空区探测,准确获取采空区的三维形态、空间位置、实际边界及体积大小等空间特征信息,是分析预测和监控因采空区引发的灾害、提高采矿设计和安全管理水平的重要基础性工作。采空区三维激光探测系统(Cavity Monitoring System,CMS)在隐患采空区群三维探测可视化、采空区失稳破坏探查分析、采场回采边界获取及贫损可视化计算、矿柱回采辅助设计、溜井垮塌三维探测及分析与计算等领域开展了相关应用,取得了良好的实际应用效果[1-2]。
近年来,三维激光扫描技术在采空区探测中逐渐被广泛地运用,利用三维激光扫描系统获取的大量点云数据,一般借助逆向工程的软件系统进行预处理,生成三维模型,再导入通用建模分析工具进行后期三维处理[3-5]。由于没有专门针对采空区的点云处理系统,不得不在多个软件间进行文件格式转换和数据交换,浪费大量时间和精力。
随着采空区三维激光探测技术的研究和应用不断深入,紧密结合当前软硬件技术基础,研发具有自主知识产权、专业用于采空区三维激光扫描信息处理的集采空区信息管理、三维模型构建、剖切面生成、采空区体积及顶板面积求取、模型间布尔运算等功能于一体的采空区三维激光扫描信息可视化集成系统势在必行。為此,根据多年研究和实践经验,以及国内矿山实际应用需求,开展采空区三维激光扫描信息可视化集成系统(CVIS集成系统)研发。
1 CVIS集成系统相关设计
采空区三维激光扫描信息可视化集成系统必须能够准确获取隐患采空区群的三维空间形态、空间位置和实际边界,计算出采空区体积和顶板面积,为矿山进行采空区有效处理、资源安全回收提供基础性依据;准确获取因采空区垮塌造成的破坏情况(如对工程巷道的破坏情况等),及时掌握破坏的准确位置及破坏的程度和范围,为矿山制定相应的综合治理方案提供基础依据。建立采空区的三维可视化模型,准确获得采空区的三维空间形态和实际边界,结合采场设计资料,实现对采场回采矿石量、废石量、充填体量、矿石贫化率、采矿损失率等回采指标的可视化精确计算,并根据采场实测资料,分析采场贫损控制效果,提出改善采场回采贫损控制的技术方案[6]。
1.1 技术路线
根据系统研究的目的要求,提出了CVIS集成系统设计的具体技术路线,如图1所示。
1.2 主要算法研究
根据系统技术要求搭建好相应模块的界面框架和OpenGL三维显示环境,在该主软件平台下集中进行了下列主要模块算法研究。
1.2.1 点云数据处理分析
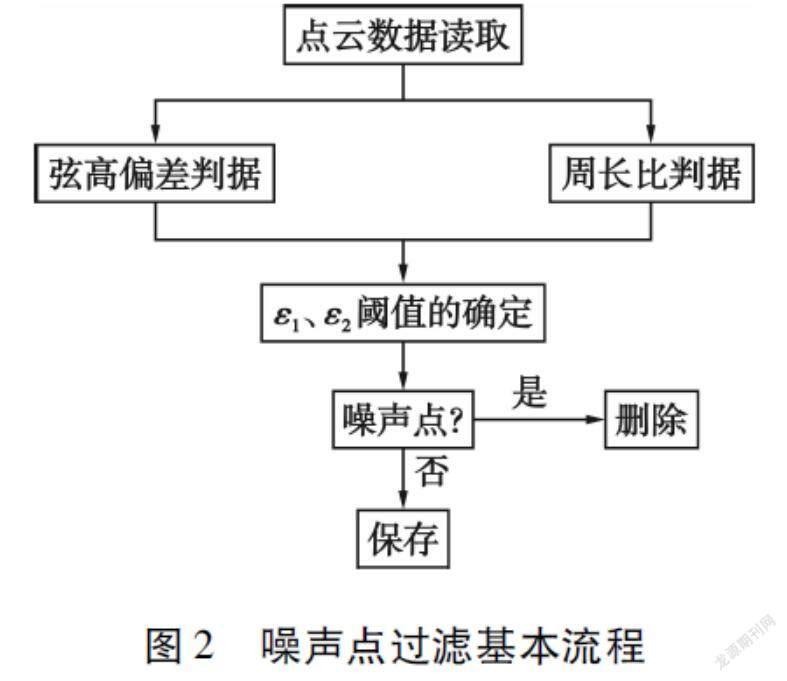
运用CMS采空区三维激光探测系统探测得到的采空区点云数据量非常庞大,且其中包含了大量的噪声点。直接运用探测到的点云数据进行三维建模处理并不能够保证建模的精度和速度,所以必须对扫描得到的点云数据进行处理。产生的噪声点进行过滤的基本流程如图2所示。
1)弦高偏差判据。弦高偏差判据与弦高比和弦夹角的基本原理是一样的,如图3所示,在扫描点云中的噪声点A,由于该点并不是采空区的真正边界点,而是其他遮挡物上的点,所以形成的夹角比较尖锐。即:△ABC中∠A较小,且点A距BC边的距离较远,则BC边的高就相对较大,也就是所谓的弦高较大。因此,弦高比和弦夹角运用一个判据就可以判断出噪声点。
2)周长比判据。弦高比和弦夹角可以去除夹角较尖锐的情形,但是对于距离扫描头较远的噪声点形成的夹角并不尖锐反而很大。这种噪声点与其他正常点相比而言,与紧邻前后两点连接形成的三角形的周长明显较大,因此可以按照周长的大小判断是否为异常点。三角形的周长计算公式如下:
P=(ax-bx)2+(ay-by)2+(az-bz)2+
(ax-cx)2+(ay-cy)2+(az-cz)2+
(cx-bx)2+(cy-by)2+(cz-bz)2(1)
式中:P为三角形的周长;a、b、c分别为三角形的3个顶点;x、y、z分别为对应顶点的3个坐标值。
根据式(1)求出三角形的周长P,将紧邻两个三角形的周长P1、P2作比值记为P′=P1/P2,并与设定的阈值(ε2)相比较判断是否为异常点,是否需要删除[7-8]。2022年第3期/第43卷 采矿工程采矿工程 黄 金
1.2.2 基于旋转面的格网三角剖分算法
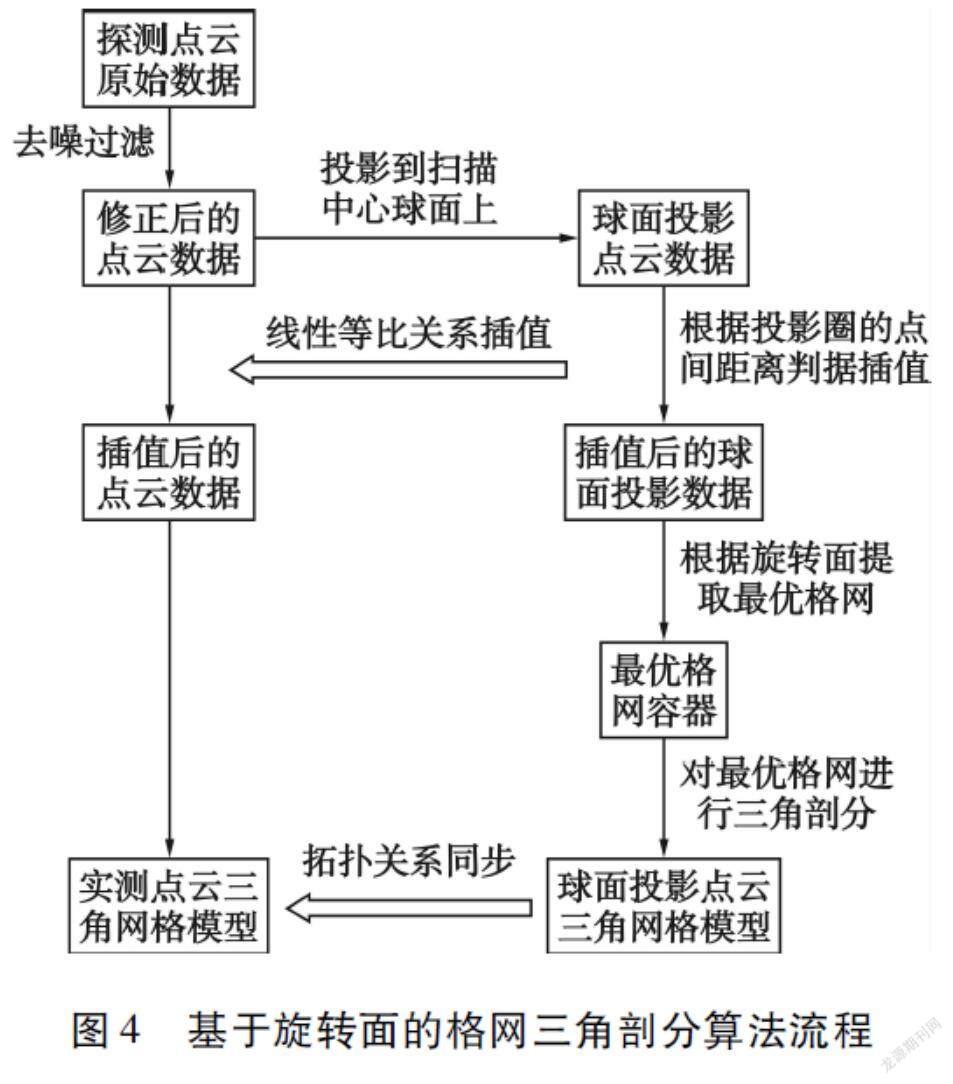
由于采空区探测条件复杂,可能产生噪声点或个别点数据丢失的情况,通过点云过滤算法可以将明显的坏点过滤删除。由于存在点数据缺失,破坏了扫描点云应有的非常规的拓扑关系,这对于有序点三角剖分产生非常不利的影响。因此,对于如何对数据丢失的有序点云进行三角剖分,本文研究了基于旋转面的格网三角剖分算法。
基于旋转面的格网三角剖分算法首先通过球面投影的有序点插值方法进行插值后,复原扫描点云规则的空间拓扑关系,然后以球面上扫描圈的中心点连线为旋转轴,依次从一圈中提取点生成旋转面,以旋转面为基准在下一圈搜索能够生成最优格网点的旋转面,在最优格网基础上完成三角剖分。基于旋转面的格网三角剖分算法流程如图4所示。
1.2.3 拼合散乱点云球面投影三角剖分算法
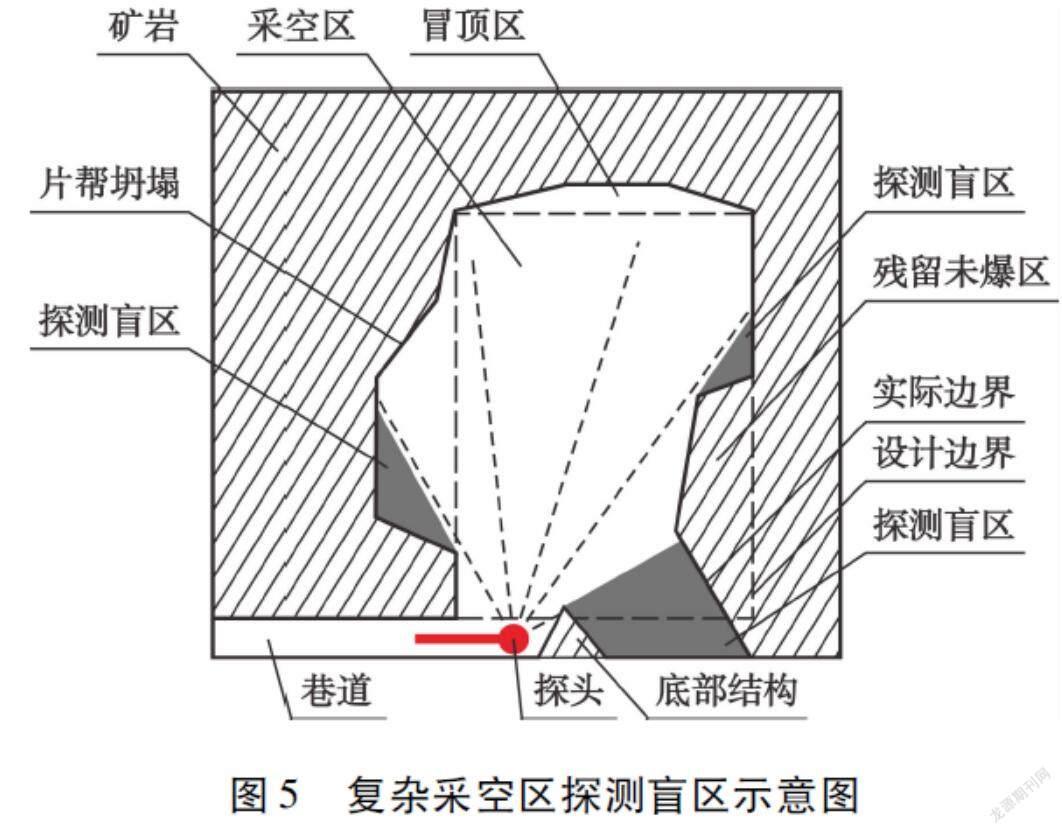
针对采空区激光扫描探测数据处理和可视化建模,现有的三维建模软件大多集中在对单次探测的数据进行处理。单次激光扫描探测的点云数据是有序渐进的,其空间拓扑关系明显,不难构建采空区三角网格模型。实践表明,采空区由于爆破作业、失稳破坏等因素致使其形态复杂,通常需要从多个方位多次探测才能获取其完整形态[9]。采空区激光探测原理是从采空区内部向采空区边界进行扫描,扫描探头的中心位置是固定的,通过抬高扫描探头角度和360°旋转探测采空区边界,将采空区扫描探头伸入到采空区内部是探测的前提,测杆一般通过巷道或钻孔伸入采空区内部。由于采空区设计形态、片帮坍塌、爆破残留、底部结构等因素的影响,使得采空区形态复杂,加上进入采空区探测通道和测杆长度限制,容易出现探测盲区(如图5所示)。
为了避免出现探测盲区,通常需要从多个方位对采空区进行多次探测。当一个探测通道存在探测盲区时,可选择其他通道进行多次探测,从而获得采空区边界形态完整的点云数据。对多次探测的采空区边界点云数据进行去噪、拼合、稀释处理后,得到无序的拼合散乱点云数据,如何对拼合散乱点云进行有效三角剖分,是实现复杂采空区三维精确建模的基础。
1.2.4 体积算法
三角网格模型的体积计算目前主要有5类方法:①一类是将网格模型剖分为四面体,由所有四面体的体积和计算模型体积;②另一类是用一组相互平行的平面剖切模型,由剖面面积和平面间距计算网格模型的体积;③第三类是采用三角形平面投影的方法;④第四类是基于高斯公式的体积计算;⑤第五类采用六面体化模型求体积[10]。
1.2.5 顶板暴露面积算法
顶板暴露面积作为采空区空间跨度的一个重要指标,在一定程度上能够反映采空区的危险程度,但行业对于顶板暴露面积定义一直都较为模糊,目前存在2种观点:一种观点认为顶板暴露面积为顶板表面在水平面上的投影面积;另一种观点认为应当先确定顶板,然后再求其面积,所以人为定位采空区某高程以上的为顶板,顶板的表面积和为顶板暴露面积。而对于巷道的顶板暴露面积来说,是拱形部分的表面积,可用于计算支护等工程量。
针对采空区頂板暴露面积理解问题,本课题研究了顶板暴露面积的2种计算方式:一种顶板三角网曲面的投影面积计算方式,这种方式较为简单,此处不赘述;另一种为基于倾角判定的顶板面积计算方式,该方法通过判断采空区三角网格中上部三角形与水平面的倾角,当倾角小于一定值时,认为该三角形属于顶板部分,三角形面积叠加顶板暴露面积[11]。
1.2.6 剖面算法
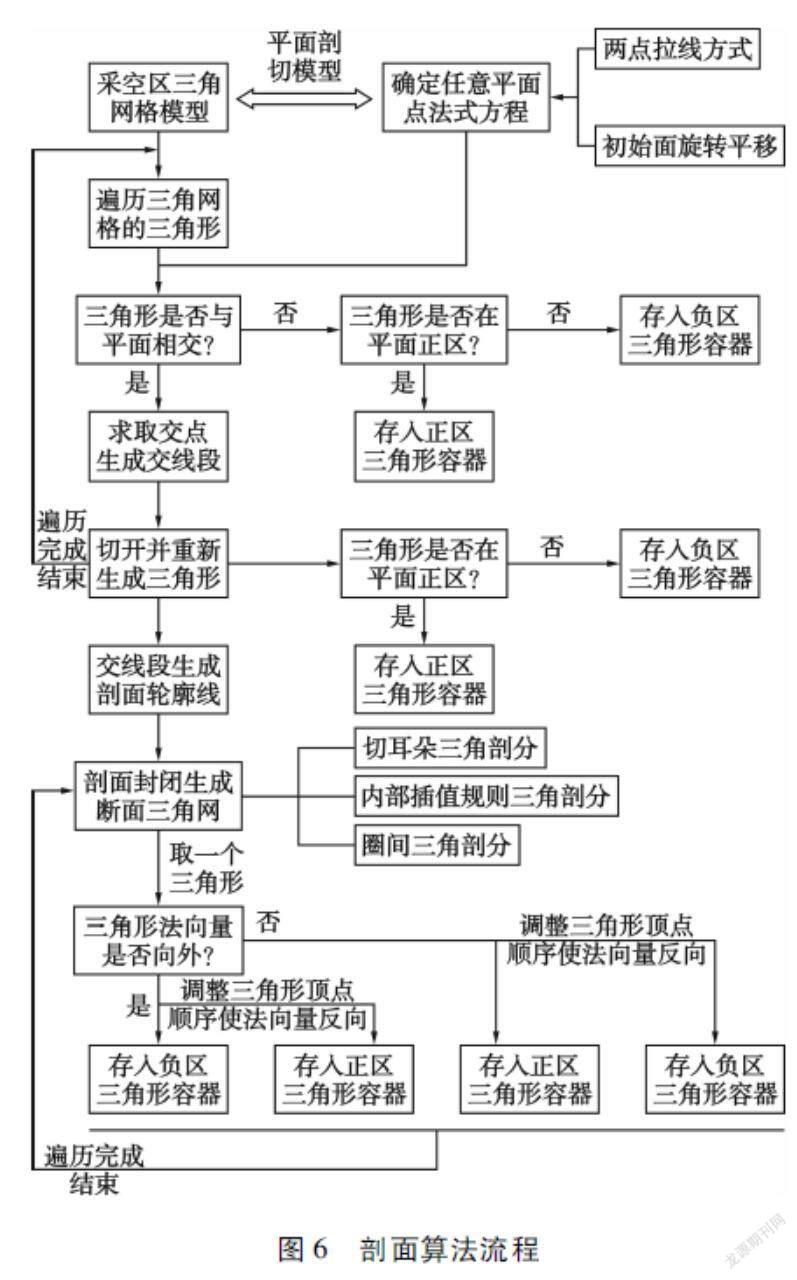
采空区三角网格模型及其剖面是采空区基础形态的重要表征,广泛应用于矿山开采设计和采空区安全性分析等众多领域。由于岩体节理裂隙、爆破冲击、失稳破坏等因素的影响,使得采空区实际形态复杂多变,如何沿任意方向精确生成其剖面轮廓线并对模型断面有效封闭,是首要解决的问题。因此,研究了复杂采空区三角网格模型任意方向剖面生成算法[12]。
以采空区三维激光探测系统获得的采空区边界点云数据构建的采空区三角网格模型为基础,开展复杂采空区三角网格模型任意方向剖面生成算法研究,其算法流程如图6所示。
1.2.7 实体模型布尔运算算法
采空区三角网格模型布尔运算主要包括联合、相交和相减3类,由于采空区形态复杂、三角网格三角形数量多,因此相互之间的布尔运算较模型与平面剖面运算要复杂很多,相交线在空间呈现各种形态,存在多个相交区域[13-14]。针对采空区三角网格模型的布尔运算研究,关键点为:①快速判断相交区域,准确获取三角形间的相交线段和区域的交线,并依据交线重新剖分被切三角形;②如何准确判断三角网格模型A的三角形在三角网格模型B的内部或外部,准确判断重新剖分生成三角形在三角网格模型B的内部或外部。
通过大量的研究和实践,该三角网格模型的布尔运算算法的核心主要包括3个部分:①空间三角形间的相交判断并提取交线;②根据交线生成分界线和重新生成三角形;③切开的三角网的正负关系判断和重新组合实现布尔运算。算法关键策略包括如何快速检测可能相交三角形、判断三角形相交的重叠线段法、切开三角形的重新生成、三角网的正负判断。
2 集成系统开发
2.1 集成系统基本界面
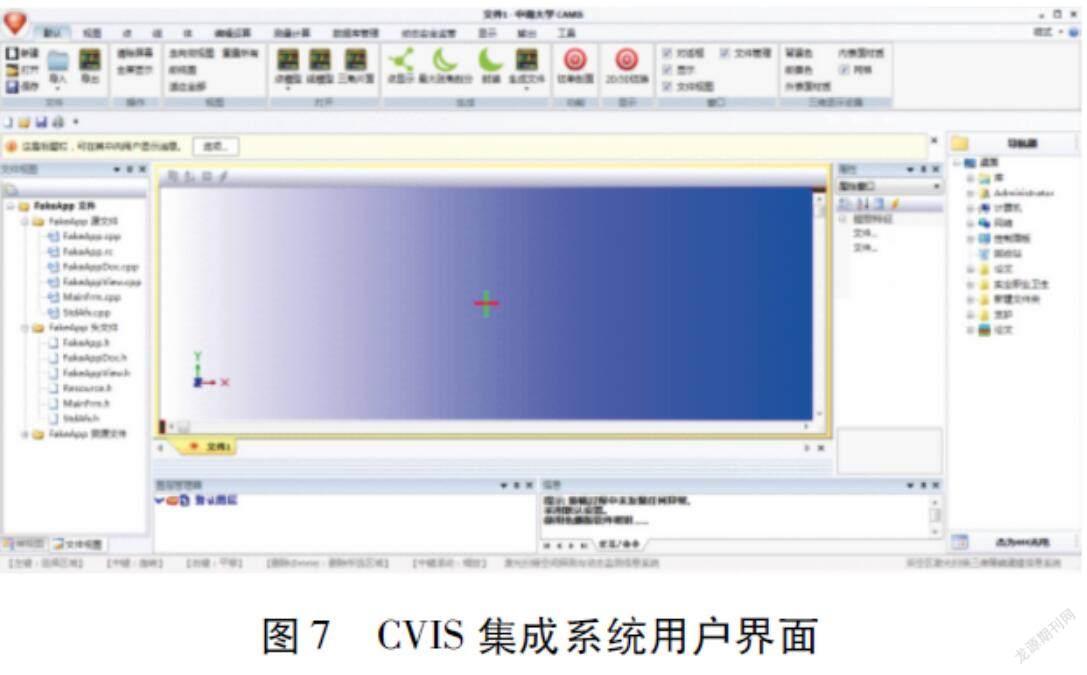
CVIS集成系统是专门用于采空区三维激光扫描空间信息处理的集采空区信息管理、采空区激光探测点云数据去噪优化、采空区三维模型构建、模型可视化显示及操作、模型编辑、剖面生成、采空区体积及顶板暴露面积计算、模型间布尔运算及可与第三方软件交互等功能于一体的采空区三维激光扫描信息可视化集成系统。CVIS集成系统开发平台为Windows7,采用功能强大的Visual C++开发环境和OpenGL开放性接口开发。系统选用最新类Windows Office界面风格——“NW Corner”(如图7所示)。界面快捷条更短,色彩效果更为明快。Visual C++与OpenGL接口的高兼容性使得开发过程更为简便、高效。
菜单根据特定的对象组织功能,比如默认菜单中包含:文件导入/打开、导出;清除屏幕;全屏显示;恢复原始数据;打开点模型、线模型、三角片面;2D/3D切换等工具。工具栏是一组与功能相关的图标。工具栏能够让用户直接找到常用的功能,而不需要从菜单中寻找。文件管理类似于Windows资源管理器,在文件管理中,通过打开、剪切、复制、粘贴和删除文件或文件夹等工具管理文件和目录。工作栏显示工作目录下选中文件的所有能识别的子文件。在图层工作面板中,管理各图层中的数据,实现对多个图层的集中管理。
CVIS集成系统中的大多数工作在图形工作区进行。这是一个三维的工作区域,任何加载到图形区的文件都具有x、y、z坐标。信息栏自动显示工作区对象的一些信息,如模型三角片面总数量、模型体积、模型顶板暴露面积等。状态栏中显示鼠标光标的坐标位置及鼠标各键的功能提示。属性面板显示工作区对象的文件类型、文件路径及信息栏内容。
2.2 系统功能介绍
基于算法基础,原始探测点云数据在载入系统时自动运行去噪算法,实现对三维建模点云数据的去噪优化。在自动去噪不能完全滤除噪声点时,系统支持根据工程经验确认噪声点后手动予以删除。在去噪并完成点云优化后,系统构建采空区三维可视化模型,并计算出采空区体积及顶板暴露面积。并且系统支持所构建采空区三维模型的多方式显示,便于对采空区状态的直观观察和分析,还可实现对采空区模型进行放大、缩小、平移、旋转等操作。同时,还可对模型进行剖切、修剪及模型间布尔运算。该系统还支持采空区体积计算、采空区顶板暴露面积计算。可通过将模型以正视图显示后用鼠标测定任意两点的距离及网格直观测量2种方式进行模型测量;还包括用户管理、数据库登录及退出,以及采空区信息数据管理等基本操作。
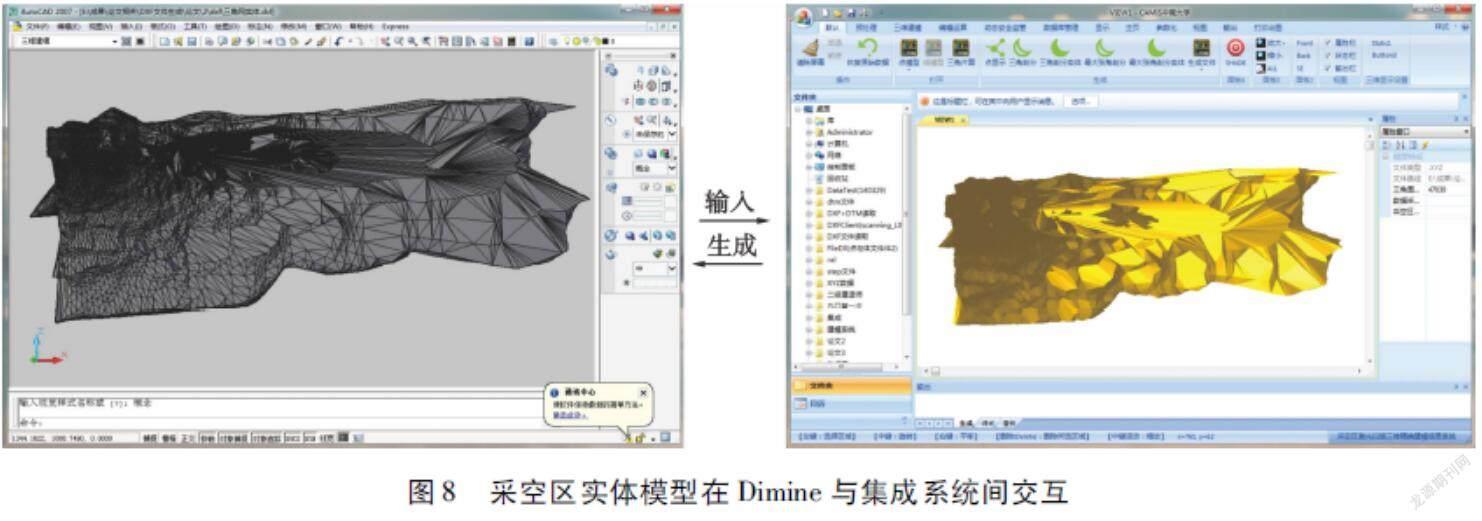
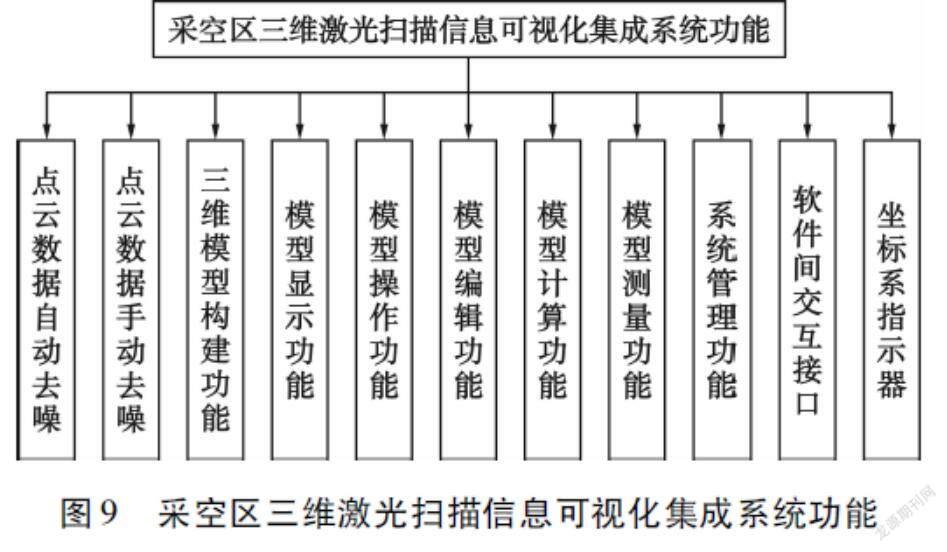
另外,为了更好地进行数据对接,系统具有与CAD及Dimine、3Dmine、Surpac等三维软件交互的接口(如图8所示),可实现与其他常用软件的对接[15-16]。具体功能列表如图9所示。
3 工程应用
广东某地下开采金属矿山Sh-600S2#南采场采用无底柱深孔后退式采矿法开采,该采场为矿柱采场。回采范围为-600 m四分段至-550 m一分段,采场南北帮控制线分别为x=292.8、x=300.8,采场宽8 m。上部硐室采切完毕,采切高度4.0 m,下部硐室拉底巷已施工,采切工作已经完成,采切高度3.4 m。采场上部硐室在-550 m一分段水平,下部硐室在-600 m四分段。采用CMS获取其三维空间数据,利用CVIS集成系统进行三维可视化处理。采空区三维模型三视角显示如图10所示。
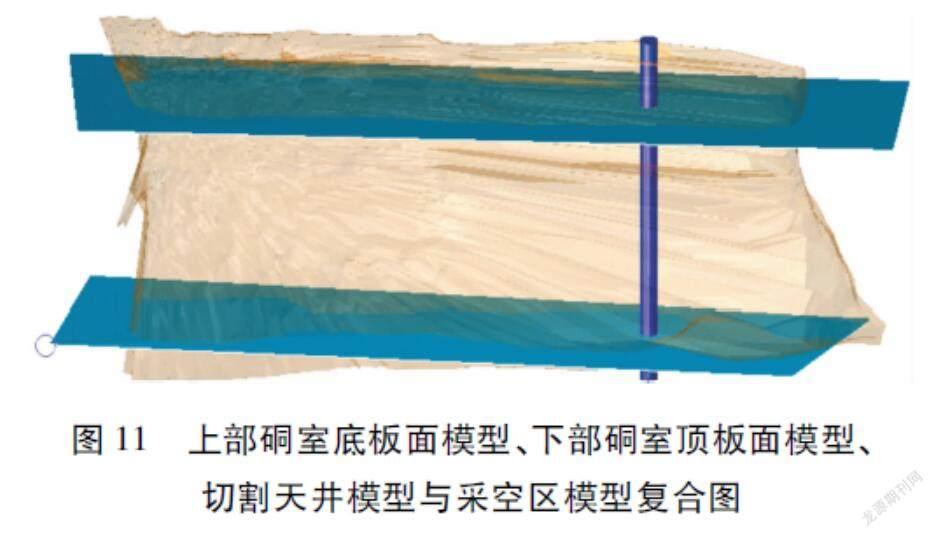
回采总体积包括回采过程中的矿石体积和废石体积。为计算回采总体积,先根据采场采准切割后的实测剖面构建采场上部硐室底板面模型、下部硐室顶
板面模型及切割天井模型,其方法是:从7次爆破采场的多个采准切割实测剖面中提取采场上部硐室底板边界线、下部硐室顶板边界线,并获取切割天井中心点坐标(x,y),以此生成上部硐室底板面模型、下部硐室顶板面模型及切割天井模型。该采场上部硐室底板面模型、下部硐室顶板面模型、切割天井模型与采空区模型复合图如图11所示。
回采总体积的计算结果如表1所示。
4 结 论
1)CVIS集成系统是专门用于采空区三维激光扫描空间信息处理的集采空区信息管理、采空区激光探测点云数据去噪优化、采空区三维模型构建等功能于一体的采空区三维激光扫描信息可视化集成系统。
2)CVIS集成系统具有界面简洁美观,2D/3D数据导入、导出接口丰富,兼容性强,集成度高,文件格式精简,数据系统管理,操作简便等优点。
3)工程应用表明,CVIS集成系统具有良好的稳定性和可靠性,适应性强。该系统易于进一步集成处理采空区相关监测数据(位移变形、微震监测信息等)、采空区稳定性分析等功能,实现对采空区的安全性评价和预警。
[参 考 文 献]
[1] 刘晓明,罗周全,杨彪,等.复杂矿区三维地质可视化及数值模型构建[J].岩土力学,2010,31(12):4 006-4 010,4 015.
[2] 罗周全,刘晓明,张木毅,等.大规模采场三维探测及回采指标可视化计算[J].中南大学学报(自然科学版),2009,40(6):1 732-1 736.
[3] 陈鑫,王李管,毕林,等.基于点云数据的采空区三维建模算法[J].中南大学学报(自然科学版),2015,46(8):3 047-3 053.
[4] 樊忠华,许振华,王进.复杂采空区群精密探测及多软件耦合建模[J].金属矿山,2014(5):138-141.
[5] 罗周全,罗贞焱,徐海,等.采空区激光扫描信息三维可视化集成系统开发关键技术[J].中南大学学报(自然科学版),2014,45(11):3 930-3 935.
[6] 熊立新,罗周全,谭浪浪,等.采空区激光探测精度影响因素分析及误差修正[J].中南大学学报(自然科学版),2014,45(4):1 244-1 250.
[7] 熊立新,罗周全,罗贞焱,等.深部复杂环境下采空区激光扫描异常点云数据修正[J].东北大学学报(自然科学版),2014,35(3):438-442,446.
[8] 鹿浩,羅周全,张文芬,等.复杂采空区激光扫描异常点云过滤研究[J].矿冶工程,2015,35(3):14-17.
[9] 罗周全,罗贞焱,张文芬,等.复杂采空区激光扫描拼合散乱点云球面投影三角剖分算法[J].工程科学学报,2015,35(7):823-830.
[10] 罗周全,秦亚光,张文芬,等.采空区体积三角网模型四面体算法改进及应用[J].科技导报,2015,33(7):30-33.
[11] XIE C Y,NGYGEN H,BUI X N,et al.Predicting roof displacement of roadways in underground coal mines using adaptive neuro-fuzzy inference system optimized by various physics-based optimization algorithms\[J\].Journal of Rock Mechanics and Geotechnical Engineering,2021,13(6):1 452-1 465.
[12] 罗周全,张文芬,鹿浩,等.采空区体积三角网模型剖面的微积分算法[J].北京科技大学学报,2014,36(9):1 143-1 148.
[13] 王红娟,张杏莉,卢新明.布尔运算算法研究及其在地质体建模中的应用[J].计算机应用研究,2010,27(10):3 844-3 846.
[14] 罗周全,秦亚光,周吉明.采空区三维可视化集成系统CAD交互接口研发[J].黄金科学技术,2015,23(5):41-46.
[15] 罗周全,周吉明,罗贞焱,等.采空区激光探测三维建模可视化集成系統CAD接口实现[J].中南大学学报(自然科学版),2015,46(7):2 532-2 538.
[16] 秦亚光,罗周全,周吉明,等.采空区可视化集成系统信息管理研究与应用[J].黄金科学技术,2015,23(2):57-62.
Design and application of goaf 3D laser scanning information visualization integration system
Tan Langlang
(Changsha Work Safety Supervision Detachment)
Abstract:In order to better model and analyze the 3D data in goaf effectively,the goaf 3D laser scanning information visualization integration system is developed.Based on the core algorithm,the point cloud is filtered and analyzed to ensure the accuracy and speed of modeling.CVIS,a system specially used for three-dimensional laser scanning spatial information processing in goaf,Windows development platform,Visual C++ development environment and OpenGL open interface are used for the development.The developed system is tested and shows good stability,reliability and strong adaptability.The system will further integrate the functions of goaf related monitoring data processing and goaf stability analysis on the existing basis,and greatly realize the safety evaluation and early warning of goaf.
Keywords:goaf;3D modeling;integration system;point cloud processing;stability
猜你喜欢
河北地质(2022年2期)2022-08-22 06:23:32
资源信息与工程(2021年5期)2022-01-15 05:37:36
数学物理学报(2018年1期)2018-03-26 08:16:44
中小企业管理与科技·上旬刊(2016年12期)2017-01-05 00:09:51
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
科学与财富(2016年15期)2016-11-24 13:20:11
中小企业管理与科技·下旬刊(2016年11期)2016-11-18 08:18:07
电脑知识与技术(2016年24期)2016-11-14 00:38:44
新疆钢铁(2015年2期)2015-11-07 03:27:52
同煤科技(2015年2期)2015-02-28 16:59:15