无人机影像匹配点云在大比例尺DEM数据生产中的应用
2022-03-25 07:06马富明
水科学与工程技术 2022年1期
马富明
(福建省水投勘测设计有限公司,福州 350001)
目前,水利工程规划设计主要以大比例尺地形图作为基准数据,然而这种离散采样的二维模型往往会忽略局部细微地貌特征。另外,对于水利信息化建设所强调的数字化、直观化、可视化3大特征欠缺表达[1]。随着水利规划设计业务的延伸,对可用于一站式、多维度的可视化基准数据提出了新的需求。特别是在水利工程前期规划中,以固定采样间隔的横纵断面图数据表征河道实际地貌形态,往往会造成施工工程量与设计工程量存在较大出入,因此,基于高分辨率DEM数据的动态采样设计是当前最优解决方案。当前,大比例尺DEM数据获取方式大致可分为传统测量手段(全站仪、RTK)、无人机航测技术、机载Lidar 3类,综合考虑实际工作效率与生产成本,无人机航测技术在作业组织、生产效率等方面具有较明显的优势。
1 无人机影像匹配点云特点
随着摄影测量技术和计算机图形学的发展与融合,基于无人机航空影像的三维信息提取技术成为当前测绘地理信息领域的研究热点[2]。通过利用以SFM、CMVS和PMVS为代表的影像匹配算法,可从无人机影像中提取高密度、纹理丰富、结构特征明显的三维点云数据。同时无人机影像匹配点云在DEM数据生产中也存在诸多问题亟待解决,如数据冗余、建筑物边界线性特征不明显、粗差点较多等,这就给后续的特征信息提取、点云滤波、三维模型重建带来了很多不便,而且也会制约更深层次的信息提取与表达[3]。无人机影像匹配点云在DEM数据生产中存在的问题如图1:(a)噪声点较多;(b)建筑物结构特征不明显;(c)高反射率地物(水域)无法获取;(d)植被覆盖密集区域无地面点。
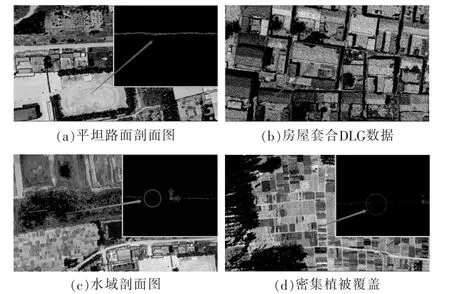
图1 无人机影像匹配点云图
2 试验区概况及总体技术线路
2.1 主要技术路线
结合无人机影像匹配点云的特点,研究了DEM数据处理的关键技术环节如图2,包括影像匹配点云的生产、点云滤波、DEM精细化编辑及精度评定[4]。
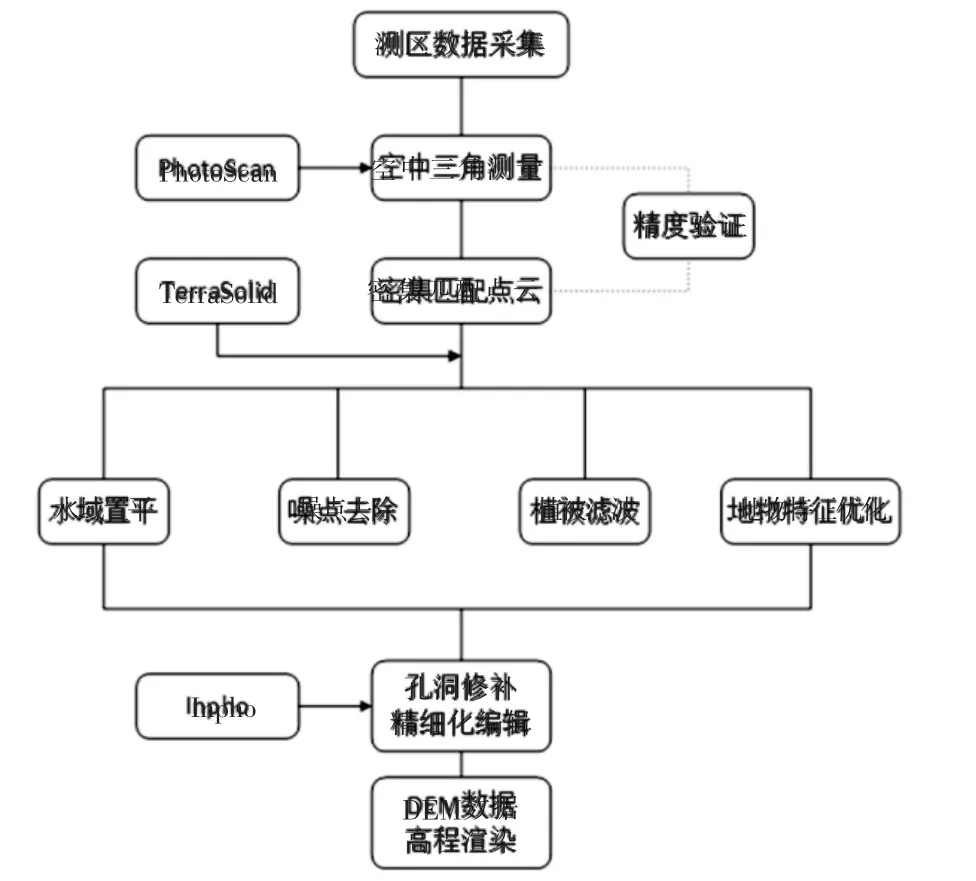
图2 DEM制作流程
2.2 试验区数据获取
王村分洪闸位于河北省文安县境内的赵王新河右堤(千里堤)上,距白洋淀枣林桩枢纽18km,是分减赵王新河洪水,控制向文安分洪的重要工程。本次测量任务主要是防洪段1∶1000 DEM数据,测量范围为长约2km、宽约1km的块状区域。作业期间渠系、河道内存在积水,人员无法实地作业,故采用无人机航空摄影测量作业方法[5]。
2.2.1 航飞参数设计
项目采用纵横CW-10固定翼无人机航摄系统,搭载SONY-ILCE7R相机及POS平台进行测区试验,具体相关参数如表1。通过现场踏勘,并结合《低空数字摄影测量外业规范》要求,确定无人机航线飞行方向为东西向,相对航高310m,航向重叠度为70%,旁向重叠度60%,影像地面分辨率为0.04m有效架次1次,总共获取579张照片。

表1 无人机航飞技术参数
2.2.2 像控点布设由于无人机影像重叠度大,基线短,按照《1∶500 1∶1000地形图航空摄影测量外业规范》要求,外业像片控制点布设沿航向、旁向分别布设,具体为航向间隔300~400m布点,沿旁向间隔300~400m布点。此次试验区共布设12个控制点,如图3,其中每个控制点均可以作为平高检查点,为后续数据处理提供地理参考。

图3 像控点布设
3 数据处理
3.1 解析空中三角测量
解析空中三角测量是摄影测量4D产品生产的第一道工序,对于高精度的航空摄影测量应用至关重要。由于无人机搭载的非量测相机获取的序列影像经自由网平差后存在掉片、扭曲变形等问题,因此严密的相机检校参数对于空三加密的精度、稳定性尤为重要。综合考虑相机检校能力、自动化处理程度,本项目选取PhotoScan进行空三解算,并结合PhotoScan解算报告中的平面误差和影像匹配点云的高程误差评定空三精度,如表2。
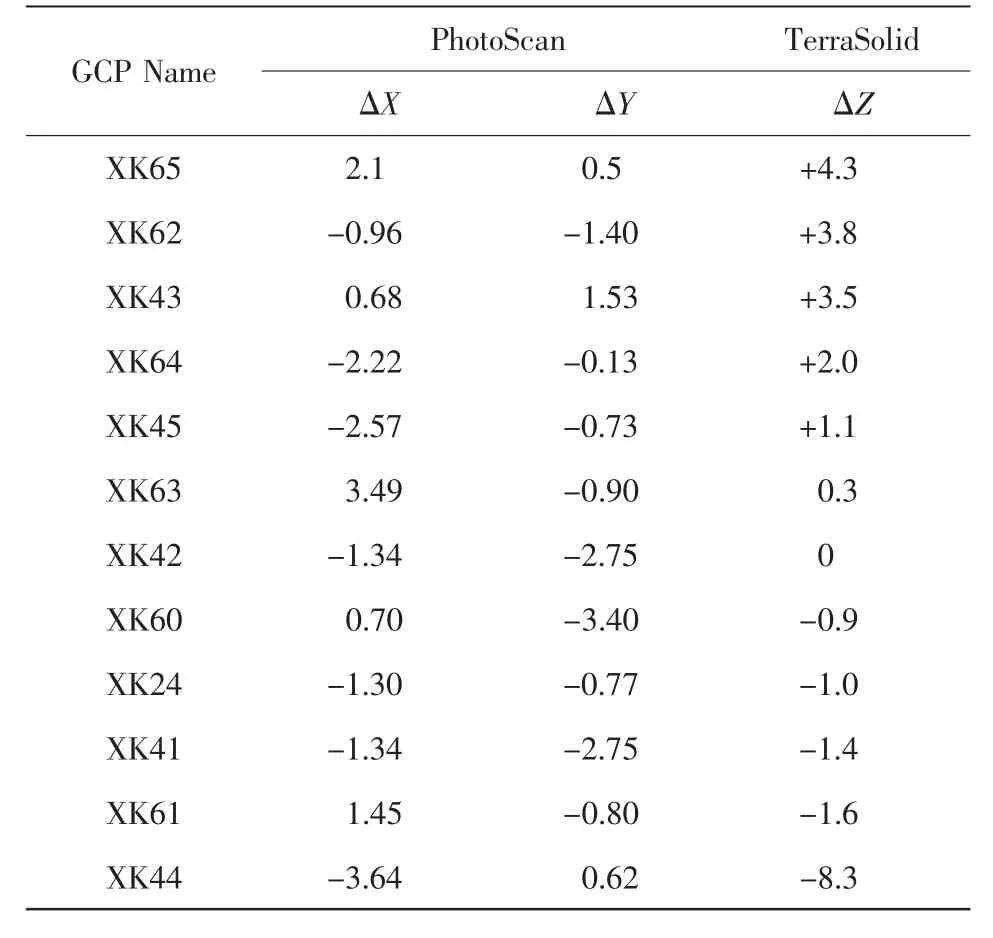
表2 像控点精度 单位:cm
3.2 无人机影像匹配点云滤波
由于影像色调不一致、空三解算精度、相机检校等因素的影响,无人机影像匹配点云存在大量噪点、建筑物结构缺失、水域漏洞等状态,对后续DEM数据生产带来诸多不利影响。结合本项目测区地貌特点,探讨了基于TerraSolid的无人机影像匹配点云数据处理方法[6]。
3.2.1 水域置平
无人机影像匹配点云在高反射率区域(如河流、池塘)表现为大量粗差点,因此需要外业实测该区域的范围线、高程数据,以便内业编辑。利用TMODEL模块的Fix Elevation选项,对该项目内水域高程进行修正。
3.2.2 植被滤波
在地面点分类算法之前,必须对低矮植被密集覆盖区域进行有效滤波。通常采用以下两种滤波方法:①调整地面分类算法中的Max building size数值,但会造成DEM数据细微地貌特征被忽略;②采用植被指数分类算法,即根据点云的色彩信息构建分类波段。本项目采用第2种解决方法,具体参数设置参照如下Visual band difference计算公式(RGB代表点云颜色信息)。

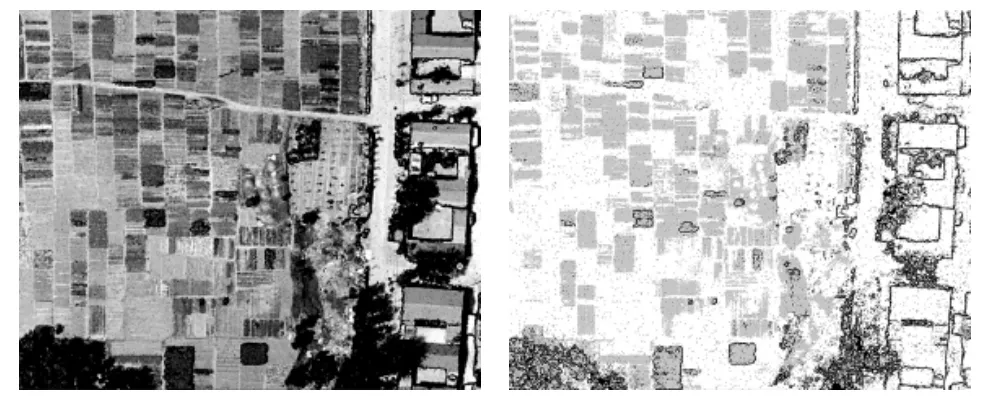
图4 基于植被指数滤波算法对比
3.2.3 噪点去除
根据对地面点分类的影响,噪点可分为低点(明显低于地面的粗差点)和表面噪声点(与地面点粘连在一起)。对于低点,采用Low points算法可有效去除;对于表面噪声点,采用Surface points对原始数据进行拟合处理,可以改善建筑物结构特征。
3.2.4 地面点提取
TerraSolid地面点滤波算法采用的是迭代三角网法,即在初始采样范围内选取最低点作为种子点,根据所构建三角网的迭代角度、迭代距离对地面点进行阈值筛选,直到三角网内不再有新的地面点加入。其中Max building size是该算法最为关键的参数,过大会导致地貌特征失真,过小会出现大量非地面点误分类,建议根据项目区域建筑物中位数尺寸设置。
3.3 精细化编辑
经过TerraSolid滤波后的点云数据存在大量孔洞,且存在一定的错误分类点[7]。本项目采用Inpho软件的DTM模块对其进行孔洞插值、局部细小突起精细化编辑,如图5。
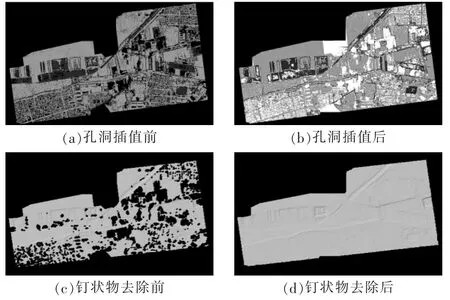
图5 精细化编辑前后对比
3.4 DEM数据高程渲染及精度平度
将人工精细化编辑后的点数数据导入Global Mapper构建三角网模型,并以高程进行颜色渲染。
外业在顾及地貌特征基础上,均匀采集平坦区域检查点(采集原则同像控点)。本次共采集150个检查点,以检查点数据为基准按照式(2)对DEM进行精度评定。

式中 m为DEM高程中误差(m);Δ为检查点野外实测高程与DEM内差值不符值(m);n为参与评定精度的检查点数。
检查点统计结果如表3,其中最大误差0.175m,最小误差0.016m,DEM高程中误差为0.094m。对比《1∶500 1∶1000 1∶2000地形图航空摄影测量内业规范》,生产数据精度满足1∶1000 DEM规范要求。

表3 DEM数据与检查点高程对比 单位:m
4 结语
无人机影像匹配点云作为航空摄影测量生产的过程数据,其蕴涵的线性结构特征、地物地貌三维信息为新型测绘产品的生产提供了可能性。本文在分析无人机影像匹配点云数据特点的基础上,结合Lidar数据处理技术,成功提取了目标区域的地貌特征信息,并生产出满足国家规范要求的数字化产品。作为非接触性数据获取方式,结合成熟的信息提取技术,为水利工程中的防洪险情普查、应急测绘、规划勘查工作提供了一种新的解决思路。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
资源信息与工程(2021年5期)2022-01-15
天津医科大学学报(2021年4期)2021-08-21
西部交通科技(2021年9期)2021-01-11
当代陕西(2020年23期)2021-01-07
山东交通科技(2020年3期)2020-08-05
消费导刊(2017年8期)2018-01-18
计算机应用(2017年1期)2017-04-17
风能(2016年3期)2016-07-05
癌症进展(2015年3期)2015-12-18