天问一号探测器火星着陆自主避障技术设计与验证
2022-03-25 02:06刘旺旺李茂登王云鹏张晓文朱飞虎胡锦昌徐李佳华宝成黄翔宇王晓磊
宇航学报 2022年1期
刘旺旺,李茂登,2,李 涛,王云鹏,张晓文,2,刘 洋,郝 策,朱飞虎,胡锦昌,2,赵 宇,徐李佳,华宝成,黄翔宇,2,王晓磊
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
火星作为地球的近邻,与地球的环境最为相似,近几十年来一直是人类开展行星探测活动的首选目标。我国天问一号火星探测任务通过一次发射实现火星环绕、着陆和巡视探测,而进入、下降与着陆(Entry, descent and landing, EDL)过程是实现火星着陆的必经过程,也是整个任务最为关键的环节。由于EDL全过程时间很短(5~10 min),时序复杂且不可逆,而地面测控时延大(单程数十分钟),探测器进入状态、火星大气环境和着陆区坡度、岩石、陨坑等地形地貌也有很大的不确定性,因此要求火星着陆制导、导航与控制(Guidance, navigation and control, GNC)系统具有完全自主性和较强的鲁棒性,实现对探测器姿态和轨迹的自主实时控制,并在着陆末端通过自主对障碍进行检测与规避以保障其安全着陆。
天问一号火星探测器EDL过程从探测器接触火星大气进入点开始,到安全着陆火星表面结束,主要包括气动减速、伞降减速、动力减速和着陆缓冲四个过程。动力减速过程的顺利实施是成功着陆的重要一环,这一阶段主要通过主发动机进行制动减速,并完成伞-背罩组合体的规避以及对着陆区地形的障碍检测与规避,从而实现安全缓冲着陆。在我国成功实施的月球软着陆探测任务中,设计了粗-精两级接力自主避障软着陆控制方法,天问一号探测器动力减速段自主障碍检测与避障控制的设计在一定程度上继承了月球软着陆探测任务的成熟技术。然而,由于火星着陆过程与月球着陆过程存在较大差别,避障控制技术也有相应变化,一方面,在伞降减速结束时,伞-背罩组合体与着陆平台分离后各自继续飞行,伞-背罩组合体可能与制动点火后的着陆平台发生碰撞,也可能罩住着陆平台,因此,着陆平台不仅需规避火星表面的障碍,还需对伞-背罩组合体具备自主规避的能力。另一方面,在悬停精避障阶段,在激光三维成像的基础上,增加了利用光学避障敏感器和多功能避障敏感器光学成像模块进行双目精避障的冗余策略,提高了获取安全区的概率。最后,天问一号探测器在此阶段的制导、导航和控制算法设计上也进行了适应性调整。
我国月球软着陆任务研制过程中,利用试验塔架系统开展了悬停避障缓速下降试验和着陆起飞综合试验验证,对着陆过程使用的敏感器性能、障碍检测与规避控制能力、系统匹配性能等进行了全面考核。国外为了对行星着陆GNC技术进行验证,持续10余年时间通过地面验证项目来推动该技术的研发。这些地面综合试验的开展,快速的促进了相关技术的成熟,有效降低了型号研制的风险。天问一号探测器着陆GNC系统用于进入、下降与着陆过程的软硬件产品均为新研产品,开展悬停避障专项试验验证,对于任务的成功也是十分必要的。本文给出了天问一号探测器动力减速段的飞行过程、着陆过程障碍检测与规避控制的设计情况,并对悬停、避障与缓速下降段的障碍检测与规避算法的试验验证情况进行了分析和总结。
1 障碍检测与规避系统概述
1.1 硬件配置
在动力减速过程,参考国外成功火星着陆任务及后续规划任务的敏感器配置情况,天问一号探测器着陆GNC系统配备了微波测距测速敏感器和相控阵敏感器两种微波体制的测距测速敏感器实现惯性导航修正,采用线性调频连续波实现了各波束同时具备测距测速功能,这与嫦娥三号探测器和嫦娥五号探测器采用微波脉冲测距与简单连续波测速,同时依靠激光测距测速体制有较大区别。此外,为适应开伞、抛大底和背罩分离等过程的大动态过载条件,惯性测量单元也进行了大量程、高精度及轻小型化设计。作为核心控制器的进入下降控制单元在收到惯性测量单元和测距测速敏感器的测量信息后,通过对多种信息融合自主导航处理来获取着陆平台的实时状态信息。
美国在Mars 2020任务中首次实现了火星着陆过程的自主安全点选择,但其使用了地形相对导航策略,需要通过轨道器获取的高精度遥感图像制备导航地图和安全目标地图,并事先装载于着陆器上用于着陆过程的地形匹配导航。天问一号探测器着陆平台在动力减速过程的背罩规避、落区障碍识别任务无需事先获取的高精度遥感图像,而是由进入下降控制单元、光学避障敏感器和多功能避障敏感器完全自主完成的。其中,进入下降控制单元配有三机热备份的计算机板和双机热备份的图像处理板,图像处理板用于多功能避障敏感器和光学避障敏感器图像数据处理和安全点解算等,计算机板根据解算获取的安全点信息完成制导、导航与控制解算,并控制着陆平台推进系统完成障碍规避。多功能避障敏感器包括激光三维成像模块及光学成像模块,激光三维成像模块由进入下降控制单元通过串行总线直接控制,在悬停成像过程对落区进行激光三维成像,光学成像模块及光学避障敏感器由图像处理板通过串行总线进行成像控制,在防热大底分离后对落区进行周期性光学成像,实现光学粗避障、背罩规避以及悬停成像过程的双目立体地形识别。进入下降控制单元与多功能避障敏感器、光学避障敏感器之间的信息交互如图1所示。
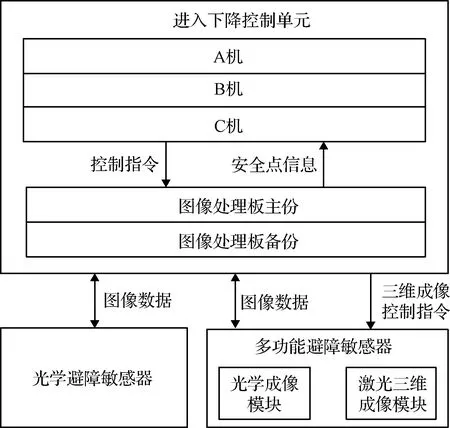
图1 天问一号探测器障碍检测系统信息交互示意图
1.2 自主避障飞行过程
天问一号探测器动力减速过程可进一步分为动力规避、悬停成像、避障机动和缓速下降等子阶段,如图2所示,这一阶段着陆平台的导航均采用惯性导航配以测距测速修正(10 m以下不再使用测距测速修正)的方式。
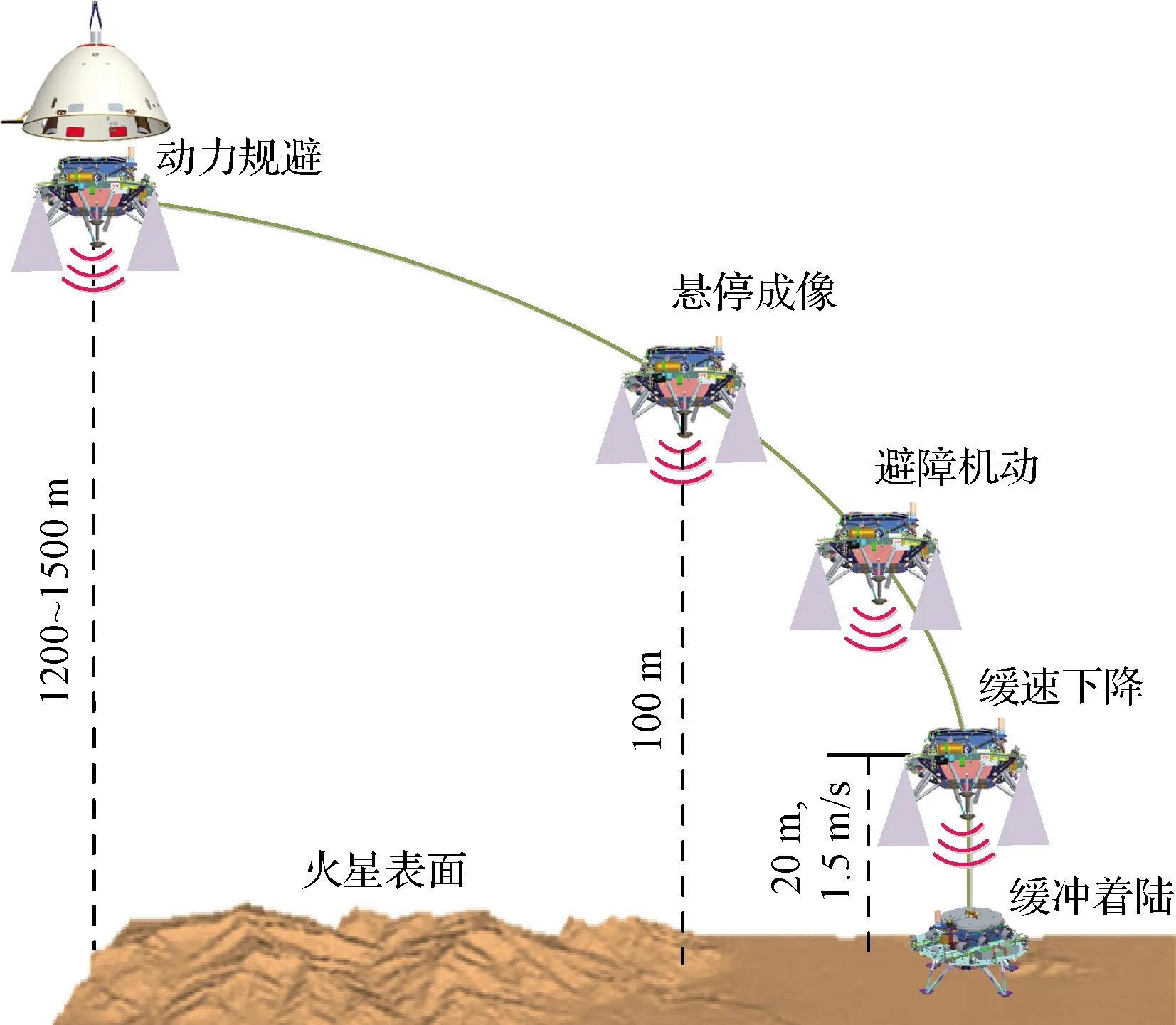
图2 天问一号探测器动力减速过程示意图
动力规避段从伞-背罩组合体与着陆平台分离到着陆平台进入悬停高度、速度范围,主要任务是控制着陆平台7500 N变推力主发动机消减速度,利用多功能避障敏感器的光学成像模块和光学避障敏感器进行火星表面光学成像及安全点解算,计算粗避障/伞-背罩组合体规避机动的方向,并在后期完成双目立体视觉的在轨自主标定。该阶段根据采集到的伞-背罩组合体抛除时的分离信号,延时启动自主制导和控制程序,利用制导律产生推力和姿态机动指令,进行三轴姿态控制,阶段结束高度下降至约100 m,速度减至接近0 m/s。
悬停成像段从动力减速段结束到精避障找到安全着陆区,主要任务是保持着陆平台的悬停状态(着陆平台轴向与重力方向夹角、着陆平台姿态角速度和速度等满足成像要求),便于避障敏感器对着陆平台下方落区进行成像,完成精障碍检测并选取安全着陆点。在设计思路上,综合考虑燃料消耗和避障系统性能等因素,最多进行三次图像数据处理及安全点解算,前两次用多功能避障敏感器激光三维成像模块数据,最后一次用双目立体光学系统数据,任意一次图像处理获得安全点则退出避障序列。
避障机动段从悬停成像段结束到下降至目标着陆点上方约20 m,主要任务是根据选择的安全点进行精避障和下降,使着陆平台下降到安全着陆点上方20 m时,相对火星表面下降速度到达预设值1.5 m/s,水平速度接近0 m/s。
缓速下降段从避障机动段结束到着陆火星表面,主要任务是保证着陆巡视器平稳缓速下降到火星表面,着陆火星表面的速度和姿态满足要求。着陆巡视器以1.5 m/s的相对火星表面预设速度缓速下降,消除水平速度,姿态垂直火星表面,直到关机策略生效(2路及以上触火信号同时有效或1路触火信号有效且加速度超设定阈值),立即关闭发动机,实现在火星表面缓冲着陆。
2 自主障碍识别与安全区选取算法
天问一号探测器着陆过程的自主障碍识别和安全区选取主要是由进入下降控制单元的图像处理板完成的。图像处理板对光学避障敏感器或多功能避障敏感器获得的图像进行处理获取到安全着陆点后,会将安全点在敏感器测量坐标系下的单位方向矢量、对应的成像时刻、坡度、安全概率等信息传递回计算机板。
2.1 基于光学图像数据的背罩规避与粗障碍识别
着陆平台根据与伞-背罩组合体分离后的水平速度来自主决策是否执行背罩规避,若水平速度大于25 m/s,则认为着陆过程着陆平台和伞-背罩组合体可保持安全距离,不进行伞-背罩组合体规避,仅进行粗避障,否则,进行伞-背罩组合体规避。针对火星表面环境地形特点,在粗避障算法中对光学图像进行纹理障碍分析、安全点计算和综合评价及次优选择。如果进行背罩规避,则首先根据背罩规避搜索距离及成像敏感器光轴距火面的斜距值等对安全区域进行初步筛选,再进行与粗避障算法一致的纹理障碍分析、安全点计算和综合评价及次优选择。
背罩规避安全区域初步筛选是通过在成像敏感器像平面上建立分割线的方式来完成的,如图3所示。其中坐标系下分割线:×+×+=0近似为着陆平台轨道面与当地水平面的交线在光学成像平面的投影,通过线上的两个点坐标即可获得分割线系数、、,同时根据最小安全距离和燃耗允许情况确定沿轨道面外的最小避障距离和最大避障距离。
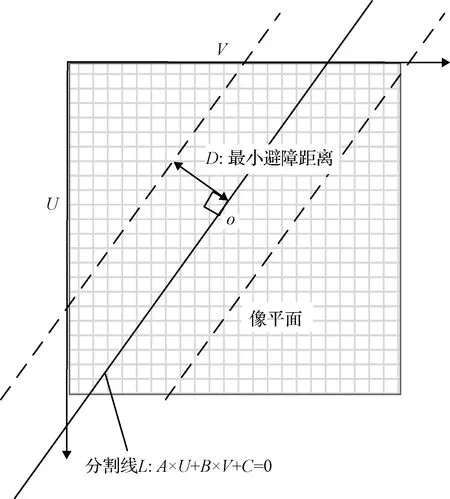
图3 光学成像像平面分割示意图
将光学像面分为×个区域,判断每个区域中心点(,)到分割线的距离是否在和之间,若区域中心在可选安全区内,则安全概率设置为1并记录区域位置,完成安全区初步筛选。区域中心点距离分割线的距离可由下式计算:
(1)
在完成初步筛选后,背罩规避与粗避障算法将进行纹理障碍分析,只不过粗避障对将像面分为的×个区域内每个区域进行纹理分析,背罩规避仅对初步筛选后安全概率为1的区域进行纹理分析。在每个区域内采用横纵坐标按平均间隔抽像素点的方式来求取区域的灰度均值和均方差,候选区域安全区评价值为:
=1-
(2)
将上面的安全区评价值与事先选定的权重矩阵进行相乘,即可得到当前区域的安全概率值,将各个区域的概率值进行排序,优选概率最大的5个区域中心点(,)作为备选着陆点。综合推进剂消耗量与安全评价值的加权计算得到5个区域中的综合最优安全着陆点,并将安全着陆点坐标转化为在敏感器测量坐标系下的单位方向矢量作为最后的输出。
2.2 基于激光三维数据的精障碍识别
激光三维数据是由多功能避障敏感器的激光成像模块采用一片MEMS摆镜通过二维光栅扫描方式来获取,每次在0.5 s的成像扫描周期扫描75000个点。扫描的物理特性可用球坐标系表示,坐标系-为多功能避障敏感器激光三维测量坐标系,如图4所示。

图4 激光三维成像球坐标系示意图
在扫描完成后,首先将测量得到的当拍斜距值转化为测量坐标系下的三维坐标信息[,,],计算公式如式(3)所示。式中,为当拍激光波束指向与平面的夹角;为当拍激光波束指向在平面的投影与方向的夹角。

(3)
在此基础上,进行像元重采样将数据规范化为256×256阵列式数据并根据着陆平台成像时刻的平均垂向速度和平均俯仰、偏航角速度大小进行运动补偿。之后,将三维数据划分为×个区域。以每个区域为中心进行代数式坡度拟合和障碍累计运算,获取像面区域的安全评价值。最后,根据推进剂消耗量及安全评价值确定最终的安全着陆点,并将安全着陆点坐标转化为在敏感器测量坐标系下的单位方向矢量作为最后的输出。
2.3 基于双目视觉的精障碍识别
双目相机的设计不仅提升了粗障碍识别和背罩规避的可靠度,实现了单目粗避障和伞-背罩组合体规避的硬件备份,同时基于视差原理可以获得着陆区的坡度、高程信息。
由于着陆平台受在轨力热环境的影响会存在轻微变形,导致双目相机的位置关系发生变化,这对双目立体识别不利。因此,在动力规避段利用火星表面自然场景图像进行自主标定,通过对两个相机的图像进行极线校正和图像匹配,并根据匹配结果修正双目参数表。
在悬停成像段,如果两次激光三维成像均未能获得安全点,将开展双目立体成像。在这一过程,采用单目障碍分析结合双目三维坡度分析的策略来确定安全点。首先,对拍摄的光学图像进行特征提取,利用单幅图像根据灰度聚类确定障碍区域和一级安全度,方法与粗避障算法纹理障碍分析一致。其次,计算光学图像中选定点的高程并进行方差筛选。之后,从每个×区域中抽取49个点进行高程计算、坡度拟合,获取像面区域的安全评价值。最后,与激光三维精避障类似,根据推进剂消耗量及安全评价值确定最终的安全着陆点,并将安全着陆点坐标转化为在敏感器测量坐标系下的单位方向矢量作为最后的输出,具体详见参考文献[11]。
3 自主避障制导方法
考虑到着陆地形的不确定性,动力减速段的制导律设计应能自主规避着陆过程的障碍。天问一号探测器进入下降控制单元计算机板获得图像处理板发送的伞-背罩组合体规避或粗避障、精避障安全着陆点矢量信息后,将进行导航、制导与控制处理。采用类似参考文献[9]中的基于图像信息的高精度相对导航方法,确定火星惯性系下目标着陆点位置和着陆平台相对目标着陆点的位置和速度矢量,之后通过制导解算生成制导指令,控制主发动机和姿控推力器实现障碍规避。
3.1 动力规避制导
动力规避段从约1.2~1.5 km高度开始,初始速度达到几十米每秒,终端高度约100 m,三轴速度约为0 m/s。这一阶段是EDL过程推进剂消耗最多的任务段,因此推进剂消耗量的优化是该段制导律需主要考虑的。不同于月球着陆任务,天问一号探测器动力减速段的初始速度方向和大小不确定性都较大,垂向、速度也较大,且需完成粗避障及伞-背罩组合体规避,不具备使用月球动力减速段基于常推力条件下的动力显式制导的条件。针对动力规避段的任务需求和约束,这一阶段设计了常推力制导和变推力避障制导策略。
..常推力制导
根据采集到的伞-背罩组合体抛除时的分离信号,延时启动自主制导程序,保持着陆平台主发动机推力方向与速度方向相反,同时根据可用最大推力(7500 N和4个垂向250 N姿控发动机)能力,利用最优控制原理,估计发动机开机时刻,直至开启发动机;一旦发动机开机采用重力转弯制导和水平机动控制,使用最大推力进行减速,持续时间约6 s。
..变推力避障制导
一旦获取粗避障或伞-背罩组合体规避给出的安全点矢量信息,切换至引入水平位置控制的多项式制导,进行位置和速度的三维控制,推力大小采用7500 N主发动机变推力来实现。多项式制导的加速度指令表达式为:

(4)
式中:G,G和G分别为制导目标加速度、速度和位置矢量;和分别为当前相对目标着陆点的速度和位置矢量;为制导剩余时间,该加速度指令扣除当前高度火星引力大小即为制导推力指令加速度。设终端高度、垂向速度和加速度分别为,和(≠0),当前高度和垂向速度分别为和,则制导剩余时间可通过下式来估算:

(5)
将通过图像信息的高精度相对导航方法获取的着陆平台相对目标着陆点的位置和速度矢量置为制导目标中的着陆点位置矢量G和速度矢量G,就可以通过机动实现粗避障或伞-背罩组合体规避。
3.2 悬停成像制导
悬停成像制导继承嫦娥三号探测器悬停成像阶段的制导方法,分为外环控制和内环控制两部分,外环控制利用主发动机和姿态机动实现,用来消除较大的水平速度;内环控制利用水平姿控发动机实现,用来消除较小的水平速度。
悬停成像阶段的制导目标为:高度为进入悬停段导航高度,三轴速度为0,由变推力发动机抵消着陆巡视器重力,保证着陆巡视器处于悬停状态,速度为零,姿态稳定。这一阶段,水平方向控制速度(进入成像状态开始控制位置),垂直方向控制高度、速度和加速度。
3.3 避障机动制导
避障机动段制导方案与悬停成像制导相同,主要制导任务是精避障和下降。根据悬停段给出的安全着陆点相对位置信息,水平机动到选择的安全着陆点上方约20 m,水平方向采用相平面控制方式使得终端水平速度接近0,垂直方向采用主发动机变推力控制方式,来实现高度和垂向速度的控制,终端相对火星表面下降速度为预设值1.5 m/s,加速度为0。根据完成障碍规避平移机动所需要的最大时间,星上自主规划垂向的加速度、速度和高度等制导指令用于下降过程的实时跟踪,保证了平移所需要的时间。
3.4 缓速下降制导
缓速下降段主要考虑到着陆安全性,为了保证着陆火星表面的速度和姿态控制精度,尽可能以较小的姿态机动和设定的速度匀速垂直下降,消除水平速度和加速度,直到收到满足关机条件的关机信号时,关闭主发动机和姿控推力器,下降到火星表面。考虑到推进剂的消耗、导航位置漂移以及着陆缓冲装置的承受能力,下降速度设定为1.5 m/s。制导方案设计上也采用外环加内环的制导方式。制导目标为:垂直方向下降速度为1.5 m/s,加速度为0 m/s;水平方向速度为0 m/s,位置控制目标为进入缓速下降段的着陆平台位置。水平方向采用相平面控制方式,利用水平姿控推力器控制位置和速度,垂直方向采用主发动机变推力控制方式,控制速度和加速度。
4 悬停避障试验验证
通过专项试验对天问一号探测器进入、下降与着陆过程的GNC系统软硬件新研产品进行验证,对于任务的成功是十分必要的。针对动力减速过程,GNC系统主要开展了最小系统挂飞试验和悬停避障试验验证。其中,2019年6月在甘肃敦煌开展了7个架次的直升机挂飞试验,有效对GNC系统有测距测速修正的动态导航性能和动力减速段的自主障碍检测与识别算法及时序等进行了开环验证,这里不再详述。悬停避障试验验证与月球探测悬停避障试验类似,通过塔架系统提供恒定拉力来抵消部分地球重力,实现火星重力场环境下悬停成像、避障机动、缓速下降和缓冲着陆过程的闭环模拟验证。本节主要对GNC系统参与悬停避障试验验证的情况进行介绍。
4.1 试验目的
悬停避障试验验证目的主要在于以下几个方面:1)模拟火星重力场、表面微波反射特性和着陆平台的运动,考核导航敏感器的动态工作性能;2)模拟着陆平台着陆过程的运动学特性,验证GNC系统自主障碍检测与识别算法;3)采用GNC、推进系统的真实部件,验证GNC与推进分系统的匹配工作能力;4)模拟着陆平台在火星的着陆过程,综合验证关机策略的正确性;5)模拟悬停、避障、缓速下降段及着陆的飞行过程,全面考核飞行程序设计的正确性。
4.2 试验系统组成
与GNC系统相关的试验系统主要有推进系统、着陆缓冲系统、塔架系统、地面总控系统等。试验GNC系统由敏感器、控制器两部分组成,执行机构属于推进系统,如图5所示。控制器为进入下降控制单元,负责敏感器数据、触火开关状态采集与处理,运行制导、导航与控制算法,发出推进系统工作指令,同时,接收地面总控发送的有线指令和数据管理模拟器发送的遥控指令,并向地面总控发送图像数据,向试验塔架系统发送实时导航位置和速度信息。敏感器包括惯性测量单元、微波测距测速敏感器、相控阵敏感器、多功能避障敏感器、光学避障敏感器。推进系统配置一台7500 N变推力发动机用于轨道控制;20台250 N和6台25 N姿控推力器用于姿态控制。其中,250 N推力器用于7500 N变推力发动机工作时的姿态控制和提供着陆巡视器水平机动能力,25 N推力器用于7500 N变推力发动机工作时的姿态控制。

图5 悬停避障试验GNC系统与外系统连接示意图
4.3 试验要求
悬停避障试验的试验要求主要包括:1)在地形识别方面,可识别高度大于20 cm的凸起,深度大于20 cm的凹坑,据此优选不小于10 m×10 m的安全着陆区;2)7500 N发动机触火关机时指标要求:(1)着陆平台距地面目标点法线的横向二维距离小于3 m;(2)着陆平台垂向速度范围1.5±0.6 m/s、横向二维速度范围0±0.9 m/s;(3)着陆平台本体坐标系三轴角速度控制误差优于1(°)/s;3)对试验过程着陆平台的姿态角变化、三轴角速度、三轴速度等进行监测,应符合设计预期。
4.4 试验过程
悬停避障试验经历了导航敏感器动静态性能开环验证、不点火工况下闭环综合验证试验、点火工况下闭环综合验证试验等三个阶段,其中点火工况是悬停避障试验的最终综合验证。点火试验工况的试验过程如下:
1)着陆平台与塔架对接、加电并完成状态设置,地面设备测量着陆平台的初始姿态并注入给着陆平台;
2)着陆平台被起吊至试验高度(需要说明的是,由于试验塔架高度限制,在实际试验过程中,GNC系统悬停成像高度设定为70 m),地面通过数据注入调节7500 N变推力发动机步进电机至真空推力输出为5000 N的工况位置;
3)地面总控向进入下降控制单元注入数据指令,变推力发动机点火,约3~4 s后着陆平台推力输出稳定(步进电机处于真空推力输出为5000 N的工况位置),塔架转入恒拉力及随动控制模式,着陆平台向下运动,器塔分离信号产生;
4)在收到分离信号的同时,GNC系统由巡航模式转入悬停成像模式并开始对着陆平台进行姿态控制,分离信号产生后经一段时间的延时确保着陆平台与塔架避开危险距离,GNC系统开始对着陆平台变推力发动机进行控制,GNC系统按悬停、避障、缓速下降全过程进行控制,同时向塔架系统提供导航位置速度,塔架系统根据实时收到的位置速度信息进行跟随移动;
5)降至模拟火星表面,安装于着陆缓冲腿上的触火开关被触发,进入下降控制单元采集到着陆冲击或触火信号后,自主关闭发动机。随后地面总控按顺序控制验证器断电,试验结束。
4.5 试验验证结果
2019年10月,在河北怀来试验场共计开展了6次点火悬停避障试验验证,不着陆工况5个,着陆工况1个。其中,着陆工况的试验结果如图6~图10所示,该次试验探测器初始重量预估为810 kg,终端质量预估为750 kg,GNC系统启控后燃料消耗约60 kg。
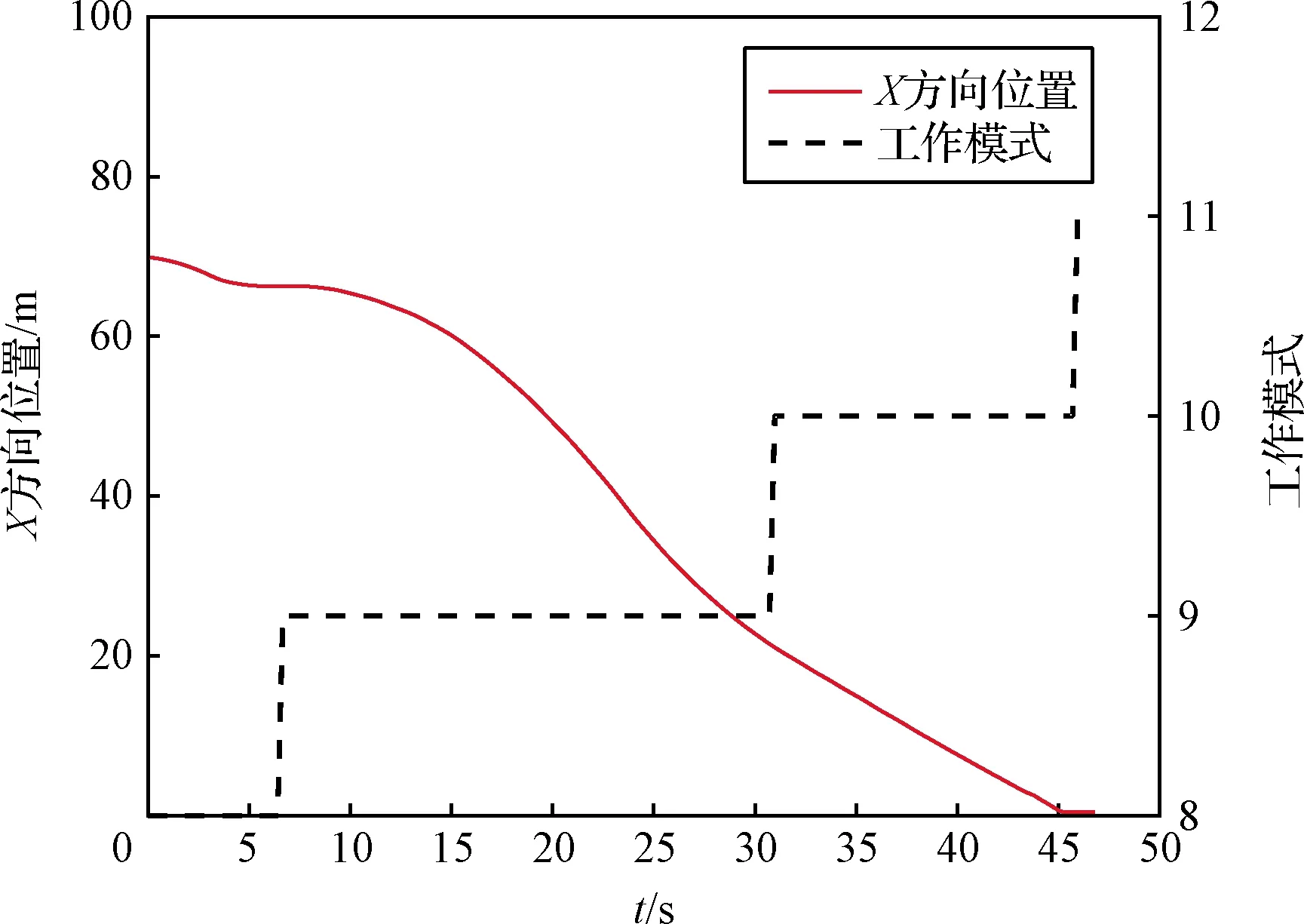
图6 着陆平台相对试验场坐标系X向位置
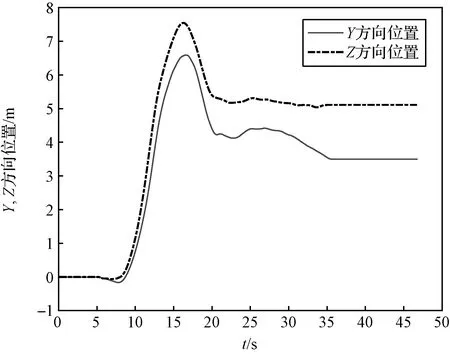
图7 着陆平台相对试验场坐标系Y,Z向位置变化
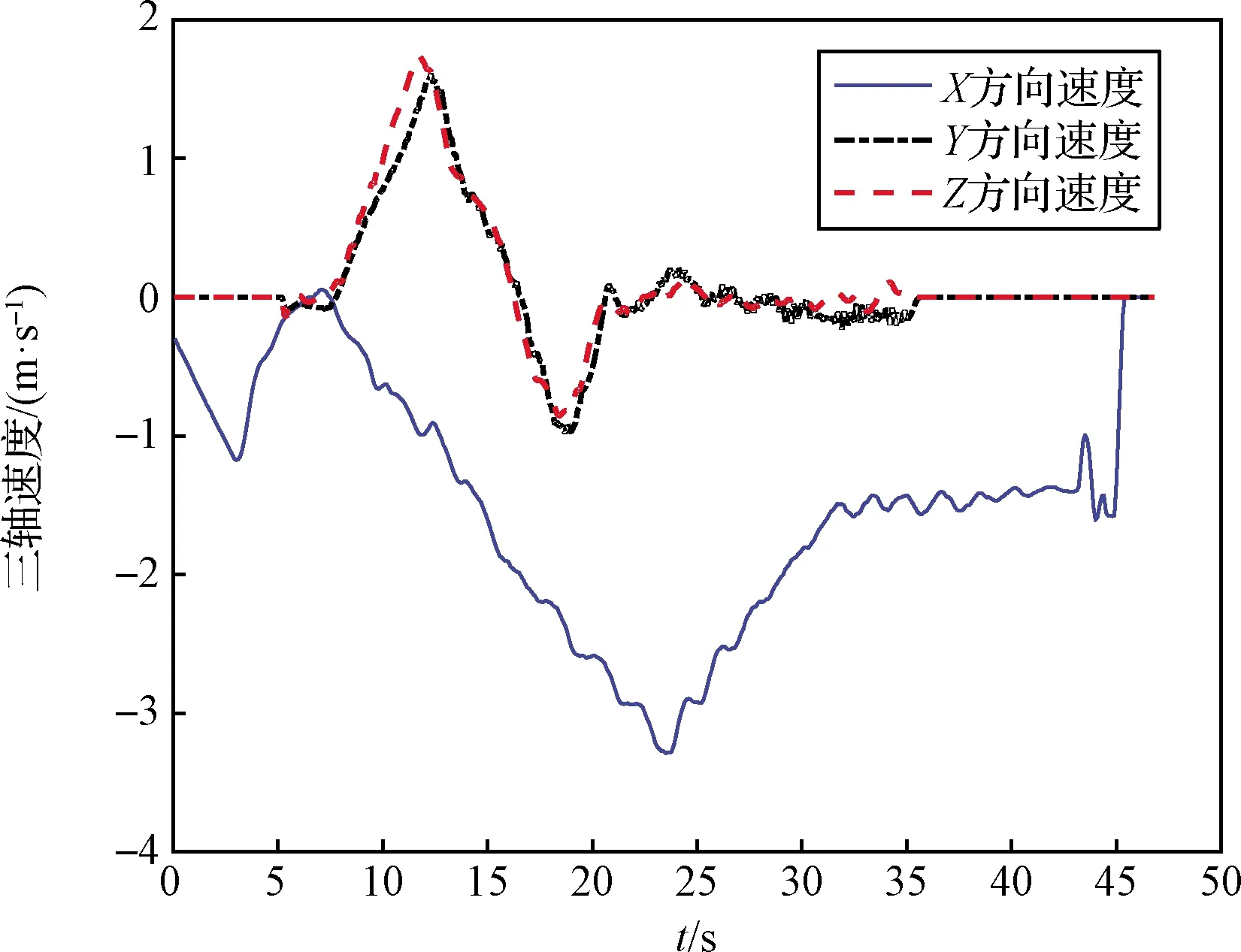
图8 着陆平台相对试验场坐标系的速度变化
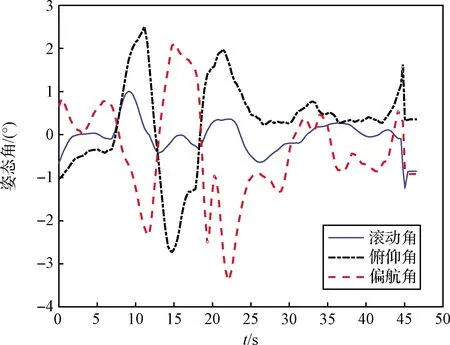
图9 着陆平台相对试验场坐标系姿态角变化
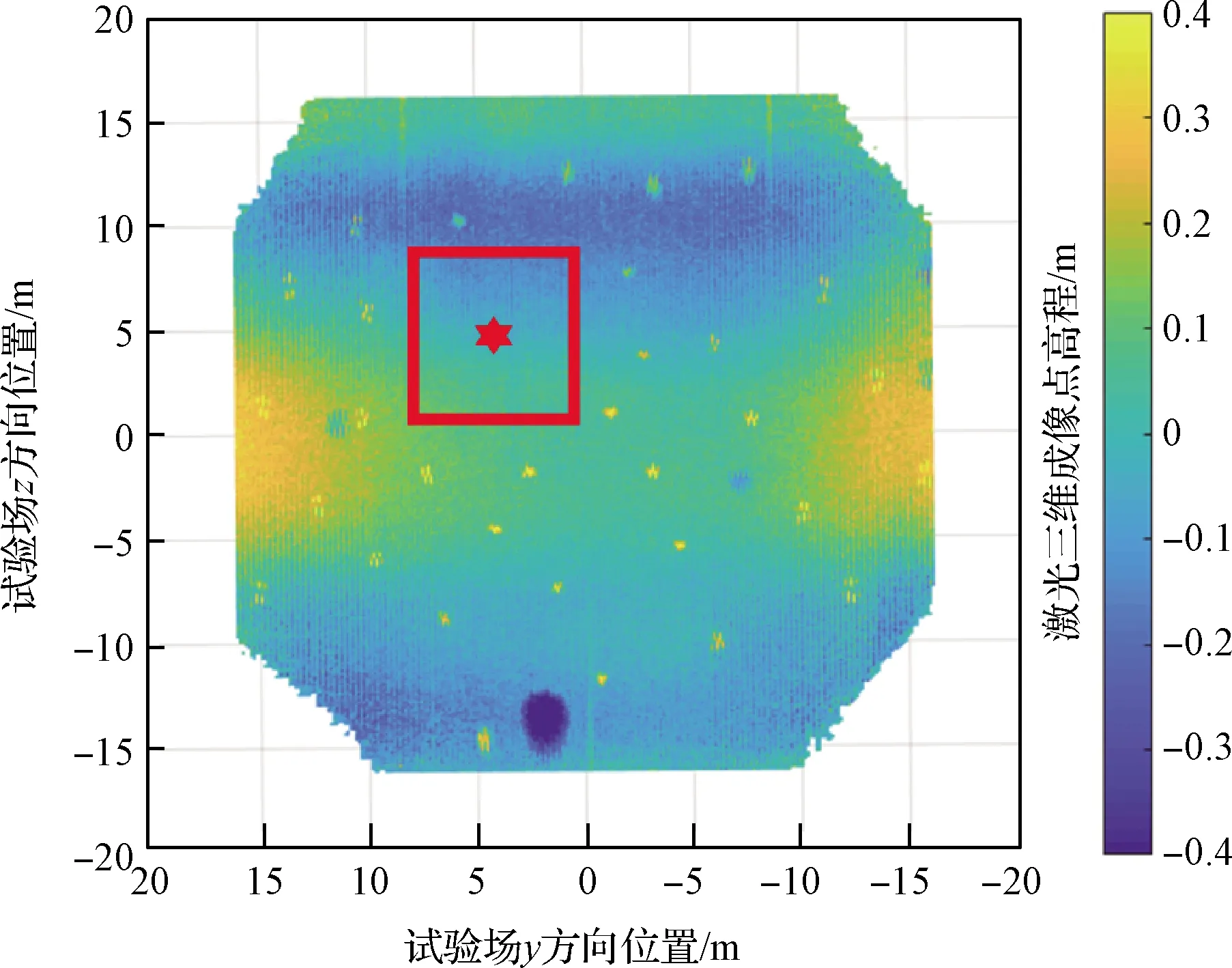
图10 激光三维安全点选取结果示意图
通过对试验测试数据分析可知:1)试验过程中GNC系统悬停成像、避障机动和缓速下降,分别持续约6.7 s(模式8),24.3 s(模式9)和15.0 s(模式10),总持续时间46.6 s;2)试验过程预设安全点(,)为(4,4)。GNC系统通过激光三维成像星上自主解算安全点为(5.72,5.42),通过地面对双目立体成像结果分析,所获得的安全点与激光三维成像一致,向和向控制结果为(3.50,5.11),满足试验指标要求;3)关机时刻着陆平台的三轴速度为(-1.13,-0.26,0.04),满足垂向速度范围1.5±0.6 m/s,横向二维速度范围0±0.9 m/s的要求;4)试验过程中,GNC系统各状态量变化符合设计预期。悬停避障试验闭环测试结果表明,GNC系统各功能性能可以满足任务需求。
5 结 论
在天问一号探测器进入舱制导、导航与控制系统的研制过程中,针对天问一号探测器火星着陆过程多体运动及表面地形不确定性强的任务特点,设计了粗避障与伞-背罩组合体规避的协同控制策略以及激光三维配以双目立体视觉的精避障策略,通过地面悬停避障专项试验验证了障碍检测与规避策略的有效性,并在天问一号探测器火星着陆过程得到了成功应用,可为后续火星采样返回和载人火星探测任务定点着陆过程的大范围机动转移和复杂地形着陆等设计需求提供一定参考。
猜你喜欢
环球时报(2022-08-22)2022-08-22
英语世界(2022年5期)2022-05-18
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
兵器知识(2018年6期)2018-06-15
兵器知识(2018年3期)2018-03-07
兵器知识(2018年2期)2018-02-08
兵器知识(2018年1期)2018-01-05