
多工作模式的电动助力转向系统控制策略研究
2022-03-25 22:33:49金永旭严天一张旗张陆达
青岛大学学报(工程技术版) 2022年1期
金永旭 严天一 张旗 张陆达










文章编号: 10069798(2022)01006911; DOI: 10.13306/j.10069798.2022.01.011
摘要: 针对电动助力转向系统存在的助力模式单一,难以满足不同驾驶员的驾驶需求问题,本文以基于三相无刷直流电机的EPS系统为研究对象,提出一种具有轻盈模式、舒适模式以及沉稳模式等多工作模式的EPS系统控制策略。利用Matlab/Simulink搭建整车动力学模型、EPS系统动力学模型和轮胎模型等,并且构建具有3种典型工作模式的控制策略模型。同时,基于英飞凌AURIX系列32位多核微控制器TC275主控芯片,设计电动助力转向系统电子控制单元,为验证具有多助力模式控制策略的有效性,进行相关离线仿真和硬件在环性能试验。研究结果表明,具有多种助力模式的EPS系统,在轻盈模式、舒适模式、沉稳模式下,转向盘最大输入转矩分别为328,500,726 N·m,说明具有多种工作模式的EPS系统可有效提高转向体验感。该研究具有一定的创新性和学术价值。
关键词: 电动助力转向系统; 三相无刷直流电机; 多工作模式; 电子控制单元; 硬件在环
中图分类号: TM36+1; U463.4; TM33文献标识码: A
电动助力转向系统(electric power steering,EPS)对于汽车操纵稳定性、燃油经济性和行驶安全性都有一定的提升,但传统EPS系统固化了助力特性,通常仅提供单一助力模式,未能充分满足不同驾驶员的驾驶需求。而具有多种助力模式的EPS系统,能够使驾驶者根据驾驶习惯的差异,自主选择合适的助力模式,提高操纵体验感。近年来,EPS系统仿真建模和控制策略等研究受到国内外学者的高度重视。N.TRUEMMEL等人[1]考虑电磁耦合和不同故障模式,对无分相器结构进行深入分析,提出在不可分离驱动部分发生短路故障时仍能稳定运行的解决方案;NA S D等人[2]提出改进EPS电机转矩控制方法,建立与转向盘角度、角速度等转向过程参数有关的目标转矩算法,实车试验表明,其可提高转向盘转矩平滑度;Y.W.JEONG等人[3]提出基于转矩叠加的转向控制方法,其通过控制齿条式EPS系统的齿轮转角,实现自动驾驶车辆横向控制;保证平稳地从自动驾驶模式切换至手动驾驶模式;T.SUN等人[4]通过将机械参数和控制参数同时优化,与参数单独优化时进行对比,提出新型EPS系统控制方法,并在时域和频域对操纵稳定性进行客观评价;D.LEE等人[5]通过区分转向感觉设计、系统稳定性和控制性能等问题,以解决传统EPS控制器在系统稳定性分析和转向感觉设计耦合方面难题;高振刚等人[6]建立二自由度整车模型及传感器故障模型,并提出EPS系统容错控制策略,结果表明该策略可在传感器发生故障时,一定程度上恢复EPS系统助力性能;赵林峰等人[7]提出了一种基于反步法的自适应神经网络控制策略,并通过Lyapunov稳定定理证明其稳定性;潘国栋等人[8]综合利用滑模控制与PID控制,对EPS系统实施助力控制;邱文涛等人[9]提出可以根据复杂工况,实时自调整PID参数的模糊PID控制策略,并通过联合仿真和台架试验进行EPS系统助力电流特性以及空载力矩特性分析;潘阳等人[10]搭建EPS系统及转向阻力矩模型,并利用Carsim搭建整车模型,结合模型预测控制策略以实时控制EPS系统,相关仿真结果表明,该控制策略可提高操纵稳定性和转向轻便性;陆金更等人[1112]采用基于模型设计方法,对EPS系统控制策略进行相关研究,并进行相关实车试验验证;商显赫等人[13]通过搭建轻型货车模型、EPS系统模型及模糊自适应PID控制器模型。研究结果表明,新型控制器响应速度更快,且左右转动转向盘时输出转角更加对称。上述对EPS系统的研究在提高转向轻便性方面具有明显优势,但通常存在助力模式单一问题。因此,本文以基于三相无刷直流电机的EPS系统为研究对象,利用Matlab/Simulink搭建含EPS系统的整车动力学模型和轮胎模型,提出并验证具有轻便模式、正常模式及运动模式等多工作模式的EPS系统新型控制策略。该研究可以满足不同驾驶员的驾驶需求。
1系统理论模型构建
1.1整车动力学理论模型构建
1.1.1车身运动模型
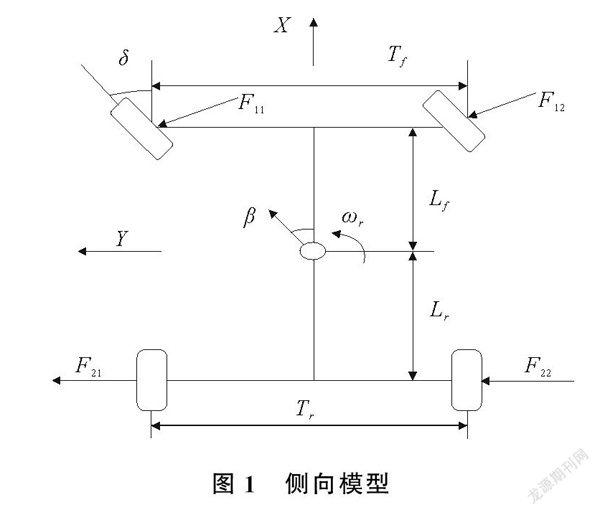
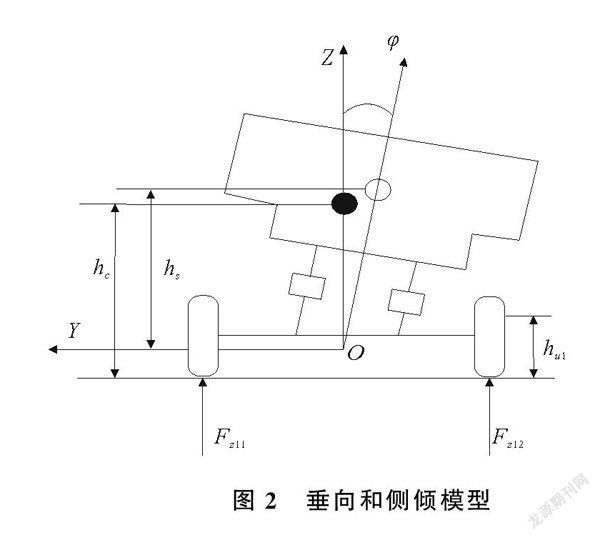
整车动力学理论模型主要包含车身的垂向运动、侧向运动和纵向运动[14],侧向模型如图1所示,垂向和侧倾模型如图2所示。
侧向力平衡方程为
垂向力矩平衡方程为
纵向力矩平衡方程为
輪胎侧偏角αij为
车轮垂直载荷为
轮胎静态垂直载荷为
轮胎动态载荷变化量为
侧向加速度为
式中,m为整车质量;ms为悬挂质量;mu1和mu2为前、后轴非悬挂质量;hs为悬挂质心到侧倾中心的距离;hc为整车质心高度;hu1和hu2分别为前、后轴非悬挂质量质心高度;Iz为整车绕Z轴的转动惯量;Ix为整车绕X轴的转动惯量;Ixz为悬挂质量对XZ轴的惯性积;Lf为车辆质心到前轴距离;Lr为车辆质心到后轴距离;L为轴距;Tf为前轮距离;Tr为后轮距离;Df为前悬架侧倾阻尼系数;Dr为后悬架侧倾阻尼系数;Cφ1为前悬架侧倾刚度系数;Cφ2为后悬架侧倾刚度系数;Ef为前悬架侧倾转向系数;Er为后悬架侧倾转向系数;ωr为车身横摆角速度;β为质心侧偏角;φ为车身侧倾角;δ为前轮转角;R为转弯半径;v为车辆纵向速度;Fij(i,j=1,2)为四轮侧向力。车辆模型主要参数如表1所示。
1.1.2轮胎模型构建
本文采用Fiala桥石轮胎模型,该模型通过路面附着系数、轮胎印迹长度、轮胎拖距、垂直载荷及侧偏角为0时的侧偏刚度,求得轮胎侧向力、回正力矩与侧偏角相互关系。轮胎侧向力、无量纲侧偏角、回正力矩分别为
式中,Fy为轮胎侧向力;Ma为回正力矩;μ为路面附着系数;Fz为垂直载荷;Lr为轮胎印迹长度;α为轮胎侧偏角;K为α等于0时的轮胎侧偏刚度;ξr为轮胎拖距。
1.2EPS系统理论模型构建
该模型由机械转向系统和助力电机等构成,机械转向系统包括转向盘及上转向柱、下转向柱及输出轴和齿条3部分,其中助力电机为三相无刷直流电机。
转向盘及上转向柱转矩和下转向柱与输出轴转矩分别为
齿条和电机分别为
式中,Td为驾驶员作用到转向盘上的转矩;θc为转向盘转角;θe为输出轴转角;θm为电机转角;Kc为扭杆的扭转刚度系数;Tc为转矩转感器检测转矩;rp为小齿轮半径;xr为齿条位移,其中θp为小齿轮转角;Tw为电机作用在输出轴上的力矩;Kr为地面对轮胎的摩擦作用到齿条上的等效弹簧刚性系数;Tm为电机电磁转矩,其中KT为电机的电磁转矩系数,i为电机电枢电流;N为减速机构减速比;Km为电机和减速机构刚性系数;Ta为电机助力转矩;Jc为转向盘的等效转动惯量;Bc为转向盘的等效阻尼系数;Jc1为下转向柱的等效转动惯量;Bc1为下转向柱的等效阻尼系数;mr为齿条质量;br为齿条的阻尼系数;Jm为电机惯性矩;Bm为电机粘性阻尼系数;Fr为轮胎回正力矩等效在齿条上的阻力,轮胎回正力矩随车辆行驶状态发生改变,所以Fr的获得要通过建立车辆模型和轮胎模型求解得到。EPS系统模型主要参数如表2所示。根据上述方程,建立状态空间方程[15]为
设状态变量x=[c,θc,r,xr,m,θm]T,输入量u=[Td,Tm,Fr]T,输出量y=[Ta,Tc,θc,xr,m]T。
系统矩阵为
控制矩阵为
输出矩阵为
直接传递矩阵为
其中
1.3三相无刷直流电机理论模型
三相无刷直流电机定子绕组采用星型接法,定子绕组相电流之间的关系为
三相无刷直流电机理论模型为
式中,ua、ub、uc为定子绕组相电压;ia、ib、ic为定子绕组相电流;L和M为定子绕组的自感和互感系数;R为定子绕组阻值;ea、eb、ec为定子绕组相反电动势[16]。助力电机输出的电磁转矩及电机转子的运动方程分别为
2具有多工作模式的助力控制策略
本文提出的具有多工作模式的EPS系统助力策略,包括轻盈模式、舒适模式及沉稳模式。其中,舒适模式属于默认模式。EPS控制单元根据转向盘转角变化率和车辆横摆角速度,为驾驶员匹配助力模式[17],驾驶员亦可根据驾驶习惯,自主选定助力模式。
2.1助力特性曲线设计
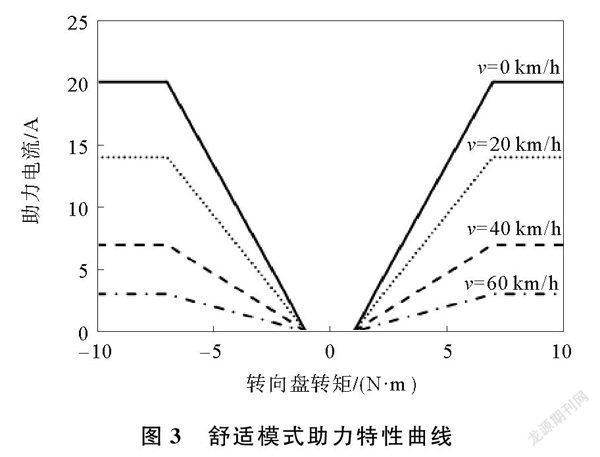
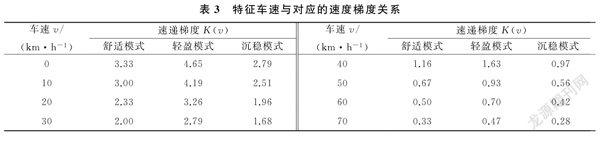
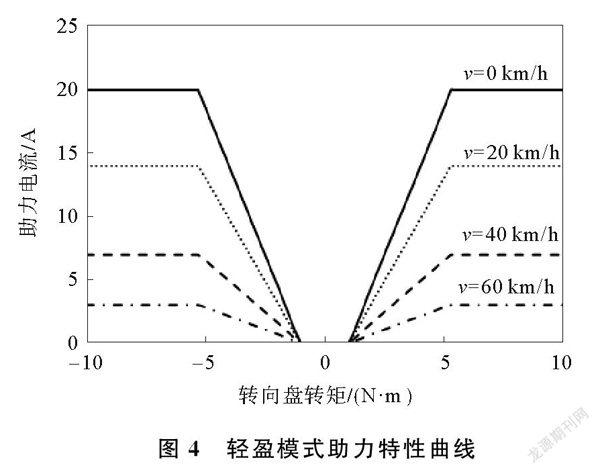
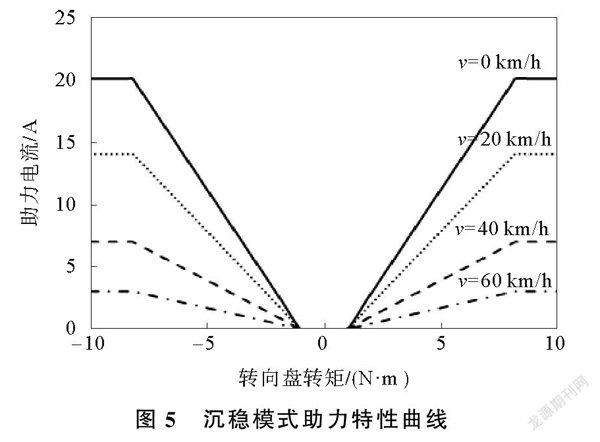
3种助力模式的主要技术特点:轻盈模式,相同工况下助力转矩较大,转向手感轻盈;舒适模式,相同工况下助力转矩适中,为默认模式;沉稳模式,相同工况下助力转矩较小,转向手感沉稳。上述3种模式均采用直线型助力特性曲线,该曲线主要参数有速度梯度K(v),助力电机的最大工作电流Imax,助力电机开始工作时的转向盘输入转矩Td0和助力电机开始提供最大转矩时的转向盘输入转矩Tdmax。
在舒适模式、轻盈模式和沉稳模式下,确定特征车速与对应速度梯度的关系,特征车速与对应的速度梯度关系如表3所示。
在舒适模式、轻盈模式和沉稳模式下,舒适模式助力特性曲線如图3所示,轻盈模式助力特性曲线如图4所示,沉稳模式助力特性曲线如图5所示。
在舒适模式、轻盈模式和沉稳模式下,拟合速度系数为
拟合得到的速度系数与车速的变化规律分别为
上述3种EPS系统助力模式,可由EPS系统电子控制单元自动切换,也可由驾驶员根据自身驾驶习惯手动切换,以满足其多元化的转向体验感。
2.2助力模式切换
EPS助力模式切换方式可分为自动切换和手动切换。当处于自动切换模式时,需实时判断驾驶员的驾驶意图,确定对应的助力模式并适时切换。因此,利用Simulink/Fuzzy Logic工具箱搭建模糊控制器,并将转向盘转角变化率的绝对值|δt|和车辆横摆角速度的绝对值|ωr|作为输入信号,助力模式m作为输出信号。选取高斯型隶属度函数,建立各模糊子集与隶属度函数之间的关系,模糊控制规则表如表4所示。
当处于手动切换模式时,驾驶员可根据个人驾驶风格,通过人机交互界面向EPS电子控制单元发送模式切换指令,控制单元根据切换指令选择对应的助力模式,并将当前助力模式信息反馈至人机交互界面。
3EPS系统建模
EPS系统整体控制结构框图如图6所示,该结构主要由整车模型、控制器模型和电机模型等组成。
3.1EPS系统仿真模型
EPS系统仿真模型如图7所示。以转向盘转矩和车速为输入量,以转向盘转角、车辆横摆角速度和车身侧倾角等为输出量。
3.2整车动力学仿真模型
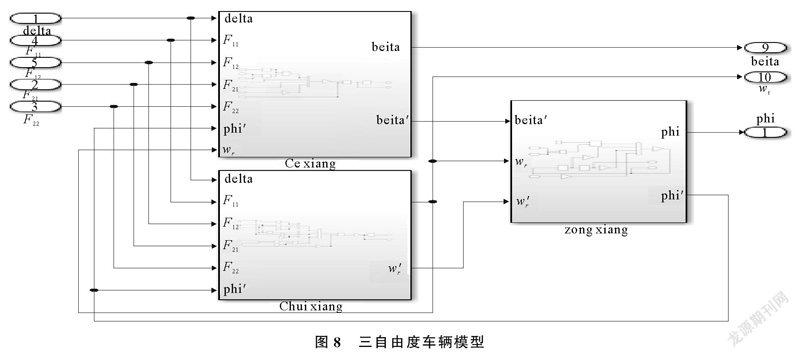
根据式(1)~式(9),建立三自由度车辆模型,三自由度车辆模型如图8所示。该模型以前轮转角和4个车轮受到的侧向力为输入量,以车辆侧倾角、横摆角速度等为输出量。
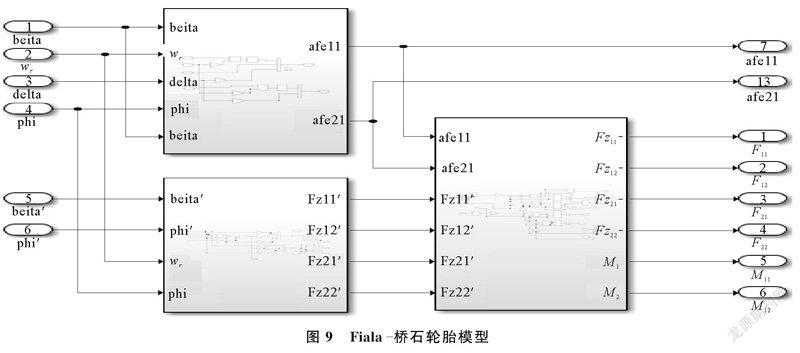
根据式(10)~式(12),建立Fiala桥石轮胎模型,Fiala桥石轮胎模型如图9所示。该模型以前轮转角、侧偏角、横摆角速度、车身侧倾角等为输入量,以轮胎的侧向力和回正力矩为输出量。其中,轮胎模型包括轮胎侧偏角、四轮垂直载荷、轮胎回正力矩及轮胎侧向力子模型。
3.3助力电机仿真模型
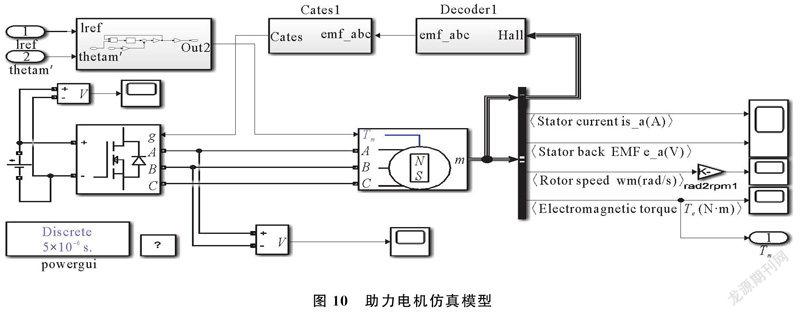
助力电机仿真模型如图10所示。模型由三相无刷电机、换向控制表和三相逆变器等模块组成[18]。该模型以助力电流和电机转速为输入量,以助力转矩为输出量。
4EPS系统仿真分析
4.1EPS系统助力曲线验证
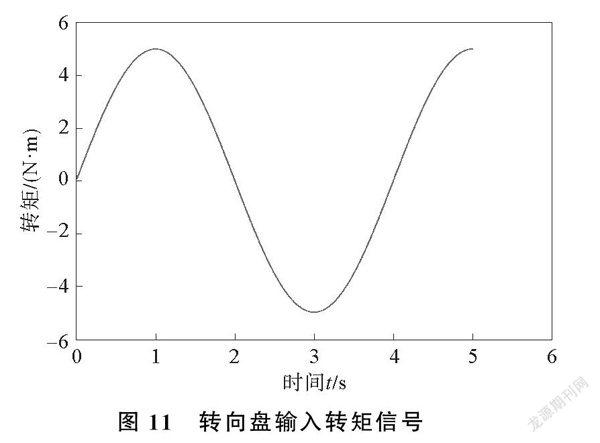
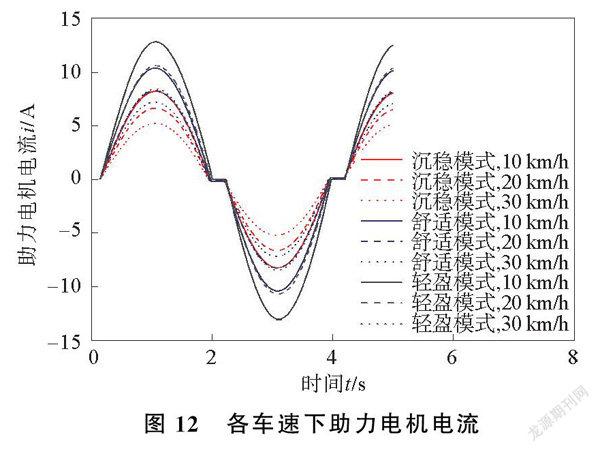
为验证新型控制策略的主要性能,设置转向盘输入转矩Td的幅值为5 N·m,周期为4 s,转向盘输入转矩信号如图11所示;设置车速分别为10,20,30 km/h,对3种工作模式下的助力特性曲线进行仿真分析,各车速下助力电机电流如图12所示。由图11和图12可以看出,随着车速的增加,助力电流逐渐减小,当转向盘输入转矩小于1 N·m时,助力电机不工作,满足EPS系统助力特性曲线的基本要求。
4.2EPS系统助力效果离线仿真分析
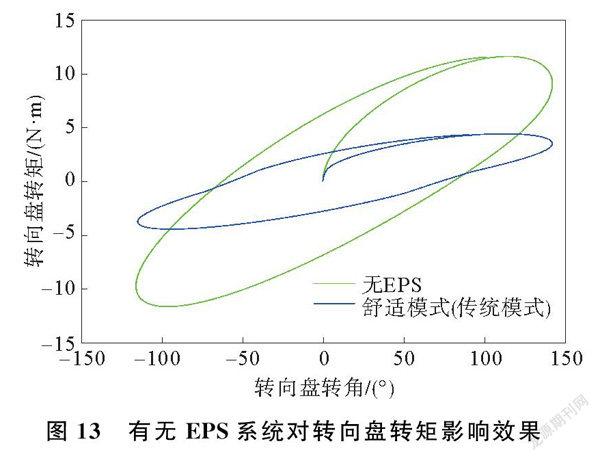
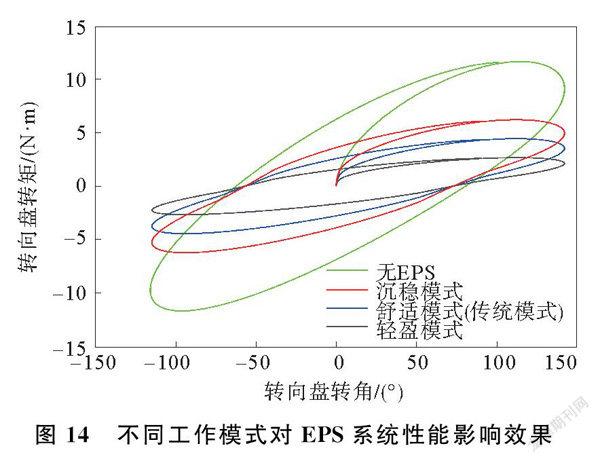
1)不同工作模式对EPS性能影响离线仿真。为深入验证具有多种助力模式EPS系统模型及助力特性曲线的有效性,现设定车速为10 km/h,转向盘输入转矩幅值为5 N·m,周期为4 s的正弦信号,在此工况下进行离线仿真实验,有无EPS系统对转向盘转矩影响效果如图13所示,不同工作模式对EPS系统性能影响效果如图14所示。
由图13和图14可以看出,单一模式EPS系统因仅提供一种助力模式,其方向盘输入转矩5 N·m;而具有多种助力模式的EPS系统,在沉稳模式、舒适模式、轻盈模式下,转向盘最大输入转矩分别为500,726,328 N·m;在关闭EPS系统助力后,转向盘最大输入转矩增加到12 N·m。仿真结果表明,本文所提出的新型多助力模式的EPS系统控制策略,可提供不同的电机助力转矩,满足不同驾驶员的个性化操纵需求。
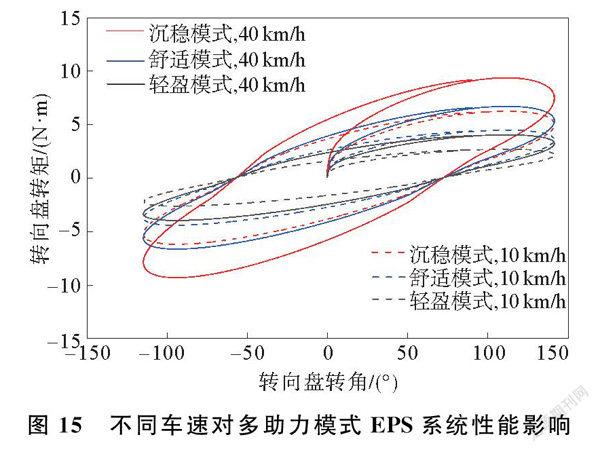
2)车速对多助力模式EPS性能影响离线仿真。为分析不同车速条件下EPS系统的助力特性,设定车速分别为10 km/h和40 km/h,进行离线仿真试验,不同车速对多助力模式EPS系统性能影响如图15所示。由图15可以看出,在舒适模式下,当车速为10 km/h时,转向盘最大输入转矩为500 N·m。当车速为40 km/h时,转向盘最大输入转矩为740 N·m;在沉稳模式下,车速为10 km/h时,转向盘最大输入转矩为726 N·m,当车速为40 km/h时,转向盘最大输入转矩为980 N·m;在轻盈模式下,当车速为10 km/h时,转向盘最大输入转矩为328 N·m,当车速为40 km/h时,转向盘最大输入转矩为478 N·m。说明在同一助力模式下,随着车速变高,多助力模式EPS系统提供的助力效果亦逐渐减小。
5EPS系统硬件在环测试实验设计
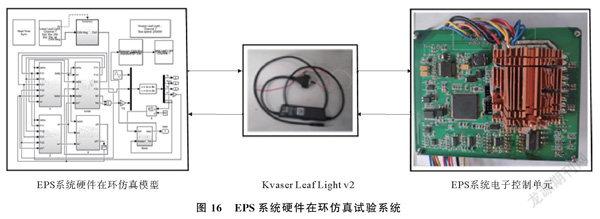
本文基于EPS系统电子控制单元、Kvaser Leaf Light V2 CAN总线分析仪以及Simulink环境,搭建实时测试平台进行硬件在环测试实验。通过Kvaser Leaf Light V2 CAN总线分析仪,实现Simulink仿真模型与EPS系统电子控制单元之间的通信,EPS系统硬件在环仿真试验系统如图16所示。将Simulink模型中的车辆信息,通过CAN[19]通讯发送至EPS系统电子控制单元,并对上述信息进行计算处理,输出得到控制信号,将控制信号通过Kvaser Leaf Light V2 CAN总线分析仪发送回Simulink仿真模型,控制EPS系统执行相应动作。通过试验分析,进一步验证所提出的多工作模式控制策略的有效性。
硬件在环试验软件代码分为底层代码和应用层代码两部分,本文设计的EPS系统电子控制单元,采用英飞凌AURIX系列多核微控制器TC275,底层代码使用底层驱动库进行编程[20];应用层代码利用自动代码生成技术,将应用层模型转化为C代码,下载至EPS系统电子控制单元,完成相关硬件在环试验。
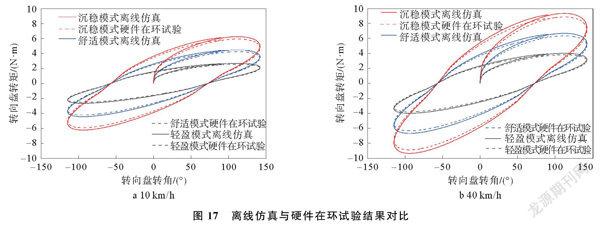
为进一步验证提出的具有多工作模式的助力控制策略的有效性,對EPS系统3种助力模式进行硬件在环试验,分别设置车速为10 km/h和40 km/h,观察转向盘转角与转向盘转矩的关系,并与离线仿真结果进行对比。离线仿真与硬件在环试验结果对比如图17所示。
由图17可以看出,当车速为40 km/h时,3种助力模式下,离线仿真与硬件在环试验结果稍有偏差,但曲线趋势保持一致。当车速为10 km/h时,3种模式下离线仿真与硬件在环试验的转向盘最大转矩均维持在500,328,726 N·m左右;当车速为40 km/h时,3种模式离线仿真与硬件在环试验的转向盘最大转矩均维持在740,478,980 N·m左右。
6结束语
本文提出具有轻盈模式、舒适模式和沉稳模式3种工作模式的EPS系统助力控制策略,并仿真分析该控制策略的助力特性,仿真结果显示,具有多工作模式的助力控制策略相对于传统助力控制策略,可以更好契合不同驾驶习惯,具有较好的应用价值。通过自行搭建硬件在环平台,开展多种条件下的半实物试验研究,进一步验证具有多工作模式的新型助力控制策略可提供较好的转向体验感。本实验存在的不足之处是对驾驶模式切换时的判别方式研究不够深入,可以引入一些其他的判别方式,这也是本实验今后值得深入研究的方向。
参考文献:
[1]TRUEMMEL N, POETZL T, REUSS H C. Improvements on availability and comfort of electric drives for electric power steering application[C]∥ 8th IET International Conference on power electronics, machines and drives (PEMD2016). Beijing: The Institution of Engineering and Technology, 2016: 11831197.
[2]NA S D, LI Z P, QIU F,et al. Torque control of electric power steering systems based on improved active disturbance rejection control[J]. Mathematical Problems in Engineering, 2020, 2020(6): 113.
[3]JEONG Y W, CHUNG C C, KIM W. Nonlinear hybrid impedance control for steering control of rackmounted electric power steering in autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(7): 29562965.
[4]SUN T, FRANCIS A, DU P P. An integrated mechanical/control design approach to optimisation of an electric power steering system under objective evaluation of vehicle handling and stability[J]. International Journal of Vehicle Design, 2017, 74(3): 257259.
[5]LEE D, JANG B, HAN M, et al. A new controller design method for an electric power steering system based on a target steering torque feedback controller[J]. Control Engineering Practice, 2021, 106: 104658104667.
[6]高振刚, 陈无畏, 谈东奎, 等. 考虑传感器与执行器故障的EPS主动容错控制[J]. 机械工程学报, 2018, 54(22): 103113.
[7]赵林峰, 邵文彬, 徐飞扬, 等. 基于反步法的自适应神经网络EPS摩擦补偿[J]. 汽车工程, 2018, 40(12): 14541460, 1474.
[8]潘国棟. 汽车电动助力转向控制策略研究[D]. 沈阳: 辽宁工业大学, 2018.
[9]邱文涛, 林慕义, 于忠杰, 等. 轻型货车转向系统操纵稳定性控制策略研究[J]. 计算机仿真, 2017, 34(9): 151155.
[10]潘阳, 冯能莲, 王军, 等. 电动助力转向系统模型预测控制策略的研究[C]∥中国汽车工程学会. 2015中国汽车工程学会年会论文集. 上海: 汽车工业, 2015: 618621.
[11]陆金更. 基于模型的电动助力转向系统控制策略开发及其试验研究[D]. 青岛: 青岛大学, 2018.
[12]刘世杰, 严天一, 贾兆功, 等. 基于模型设计的电动助力转向系统策略研究[J]. 青岛大学学报(工程技术版), 2020, 35(2): 97 103.
[13]商显赫, 林幕义, 童亮, 等. 基于Carsim轻型货车EPS系统控制策略研究[J]. 计算机仿真, 2021, 38(1): 129133.
[14]徐中明, 王吉全, 余烽, 等. 基于Simulink的电动助力转向控制策略仿真[J]. 重庆理工大学学报(自然科学版), 2012, 26(3): 17.
[15]胡康博. 电动助力转向系统的建模与仿真研究[D]. 重庆: 重庆大学, 2010.
[16]江浩斌, 唐斌, 耿国庆. 无刷直流电机助力式EPS控制器设计与试验[J]. 汽车工程, 2011, 33(11): 980984.
[17]ZHU B, YAN S D, ZHAO J, et al. Personalized controller design for electric power steering system based on driver behavior[J]. SAE International Journal of Passenger CarsElectronic and Electrical Systems, 2017, 11(2): 7787.
[18]夏常亮. 无刷直流电机控制系统[M]. 北京: 科学出版社, 2008: 6667.
[19]VERSHININ Y, NNADIEKWE B, SCHULZ S. Simulation of signal transmission in motion simulator using controller area network (CANbus)[C]∥2015 IEEE 18th International Conference on Intelligent Transportation Systems. Gran Canaria: IEEE, 2015: 26882693.
[20]张薇, 王维志. 浅谈新一代三核处理器AURIX的应用[J]. 现代制造技术与装备, 2016(1): 144146.
Research on MultiMode Control Strategy for EPS Systems
JIN Yongxu YAN Tianyi ZHANG Qi ZHANG Luda
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract: Electric power steering (EPS) system only can provide one power mode, which solidifies the power characteristics of EPS system and is difficult to effectively meet the driving needs of different drivers.This paper takes the EPS system based on threephase brushless DC motor as the research object, and proposes an EPS system control strategy with multiple working modes such as light mode, comfort mode and calm mode. It uses Matlab/Simulink to build the vehicle dynamics model, EPS system dynamics model and tire model, and build the control strategy model with three typical working modes. Meanwhile, based on Infineon Aurix 32bit multicore micro controller TC275 main control chip, the electronic control unit of electric power steering system is designed. In order to verify the effectiveness of multimode control strategy, relevant offline simulation and hardware in the loop performance test are carried out. The results show that the maximum input torque of EPS system with multiple power assisted modes is 328, 500 and 726 N·m respectively in light mode, comfort mode and steady mode. It shows that EPS system with multiple working modes can effectively improve the steering experience. The research has certain innovation and academic value.
Key words: electric power steering; BLDC; multimode; electronic control unit; hardwareintheloop
收稿日期: 20210830; 修回日期: 20211000
基金项目: 山东省自然科学基金面上项目(ZR2016EEM49); 国家自然科学基金资助项目(5147524)
作者简介: 金永旭(1998),男,硕士研究生,主要研究方向为汽车底盘电子控制技术。
通信作者: 严天一(1970),男,博士,教授,硕士生导师,主要研究方向为车辆系统动力学及控制技术。 Email: yan_7012@126.com
