基于螺杆式家用电梯的磁悬浮导轨系统设计
2022-03-24 02:34朱卫国杨体康
长沙大学学报 2022年2期
朱卫国,杨体康
(安徽建筑大学机械与电气工程学院,安徽 合肥 230601)
目前,磁悬浮技术广泛应用于列车、机床和轴承行业,但在电梯领域中,磁悬浮技术还仅被应用于商业大型电梯上。2017 年,蒂森克虏伯就已经宣布完成了磁悬浮电梯的原型机,并在德国罗特维尔市一座246 米的高塔上进行了测试。这种电梯颠覆了160 多年来电梯的设计,去掉了拉拽轿厢的缆绳,取而代之的是磁悬浮列车所使用的线性马达技术,配备多级制动系统,并通过电梯井道向轿厢传递感应电能,可以让轿厢在楼宇内实现横向移动。相比传统电梯,磁悬浮电梯具有无接触、无摩擦、能耗低、污染小、噪声小等优点,但因断电导致其中断运行的安全问题,并没有得到可靠有效的解决,另一方面,由于高昂的成本,磁悬浮技术无法大规模应用于商业电梯[1]。
螺杆式电梯是利用有矩形螺纹的螺杆,将带有推力轴承的螺母与螺杆套接在一起,然后通过电动机带动螺母转动,进而带动轿厢上升或下降的电梯。目前的导向装置常规采用的是导靴,将导靴装在导轨上,当电梯运行时,导靴和导轨间会产生较大的震动和冲击,并被直接传递到轿厢,从而影响用户乘梯的舒适感。为应对高端用户对高品质家居电梯的需求,文章用磁悬浮导轨替代传统摩擦式导轨,既保留了螺杆式电梯的优点,又避免了震动和噪声。螺杆式磁悬浮导轨家用电梯可以说是集安全、环保、节能、低噪于一体的智能电梯。
1 螺杆式电梯磁悬浮导轨的工作原理
文章将磁悬浮导向系统应用于电梯导向装置,此装置主要由永磁铁、可控电磁铁、电涡流传感器等构成,其利用导轨和电磁线圈的相互作用力,实现升降平台与垂直导轨的零接触[2]。在升降过程中,该系统能够避免升降平台与导轨之间的摩擦,减少摩擦所产生的能量损耗,避免震动的产生并降低噪声,使升降平台与导轨在不存在机械摩擦的状态下稳定安静地运行。此外升降平台与导轨之间没有接触,所以不需要润滑剂,也就没有润滑剂带来的油污染。利用PID,即比例(proportion)、积分(integral)、微分(differential),来调节电磁铁中线圈电流大小以调节磁力大小,在不同载重及不同加速度的情况下,利用电涡流传感器精确感应间隙变化,并快速精确调节电磁铁中线圈电流大小以调节磁力大小,使轿厢始终处于磁悬浮动态的平衡状态,从而使电梯运行更加舒适安静[3]。图1 为磁悬浮导轨工作原理。

图1 磁悬浮导轨工作原理
2 螺杆式电梯磁悬浮导轨的建模及受力分析
文章选取螺杆式家用电梯作为研究对象,根据上述磁悬浮导轨工作原理,将螺杆式电梯轿厢部分的机械结构引入磁场力进行受力分析,目前磁悬浮技术多运用于克服重力带来的摩擦力,作用在垂直自由度上,而文章设计的磁悬浮导轨的磁场力只作用于导轨前后左右四个方向,出于安全考虑和升降平台的精准平层,垂直上下运动选用更安全的螺杆螺母驱动,运用SolidWorks 软件设计家用电梯简化模型(见图2)。

图2 磁悬浮导轨电梯简化模型
综合整体的受力情况,为使轿厢处于平衡状态,文章需要计算提供电磁力的范围,设计可行性方案。故简化受力分析,假设螺杆只受皮带轮的扭力,作为支点;为保持平衡,导轨只受水平方向的力,A处需要提供向左的水平电磁合力Fa,B处需要提供向右的电磁合力Fb;对轿厢自重G1,为便于计算,利用三维软件确定其重心位置;家用电梯限重G2,出于极限考虑,均作用在最边缘处,平衡位置受力分析如图3 所示。

图3 升降平台平衡位置的受力分析
升降平台静平衡需要合外力与合外力矩均为零,由此可计算出所需电磁力大小。
因为合力∑F=0,所以∑Fx=0,则Fa=Fb;因为合力矩∑M=0,所以:

将实际数值a=1 016,b=156,c=1 230,d=590,G1=5 000N 代入式(1)中,则有:当空载时,G2=0,Fa=Fb=3 430.2N﹔当满载时,G2=4 000N,Fa=Fb=9 151.1N。所以电磁力的范围为3 430.2~9 151.1N。
3 螺杆式电梯磁悬浮导轨的PID 控制模型
3.1 多级磁悬浮分布式控制方案
在升降平台垂直面四角安装电磁铁,分上下两级,共12 块电磁铁。导轨边缘固定永磁铁,利用同性互斥、异性相吸的特性,使升降平台与导轨之间无接触,保持平衡稳定且起导向作用。由于上下两级的结构和功能基本对称,所以文章只对上级平台进行分析。
电梯载人过程中,随着人员站立位置不同以及随意走动,电梯的重心位置不断变化,需要及时调节各方向电磁力的大小来维持轿厢平稳。为提高其响应速度,采用分布式控制,利用多个独立的输入输出系统,降低对硬件的要求和设计难度,而且控制器阶数低,算法简单,计算量小,模拟电路均易实现[4]。上级平台设置三个控制器,采用差动控制技术,每个控制器负责根据相对应的电涡流传感器的间隙变化,增大或者减小相对方向上两个电磁铁的电流大小,经过功率放大器输出控制电流,改变电磁合力大小,再通过电涡流传感器负反馈不断调整,以保持电梯平衡稳定悬浮。导向电磁铁①和②对应控制器1、支撑电磁铁③和④以及⑤和⑥分别对应控制器2 和控制器3(见图4)。

图4 上级平台的控制结构
3.2 电磁力计算分析
当升降平台空载时,在X方向上,电磁合力为0,导向电磁铁①和②产生的电磁力F1、F2大小一致,方向相反,即:

式(2)中,μ0为真空磁导率,N为线圈匝数,Sx为X方向上电磁铁的总磁极面积,ωx为X方向上悬浮气隙值,Ix为X方向上的偏置电流。
在Y方向上,支撑电磁铁需要提供力矩保持升降平台平衡,上级平台需提供电磁力Fa,故电磁铁④和⑥提供的电磁力要大于电磁铁③和⑤提供的电磁力,以控制器2 控制电磁铁③和④为例,产生的电磁力分别为:

式(5)中,μ0为真空磁导率,N为线圈匝数,Sy为Y方向上电磁铁的总磁极面积,ωy为Y方向上悬浮气隙值,Iy为Y方向上的偏置电流,Ia为克服轿厢自重的控制电流。
当升降平台载重时,人的体重和站立位置不同,导致重心位置不确定,在X和Y方向上,均会出现不同程度的干扰力,由于控制原理一致,只讨论Y方向上控制器2 的电磁铁③和④。当干扰力出现时,传感器检测到位置偏移ωr,故控制器2 发出控制电流Ir,使电磁铁③和④的电磁力分别减小和增大,轿厢迅速回到平衡位置[5]。由公式(3)、(4)和(5)可得轿厢载重情况下,瞬间电磁合力Fa2与电流的关系:

上述公式中,Sx和Sy分别为X方向、Y方向上电磁铁的总磁极面积,Ix和Iy分别为X方向、Y方向上的偏置电流,Ir为克服轿厢载重的控制电流,ωx和ωy分别为X方向、Y方向上悬浮气隙值。
3.3 磁悬浮PID 离散化控制模型
在连续系统中,控制调节器常用的控制规律是PID 控制(见图5)。PID 控制器原理简单,可靠性强、易于设计,是工业应用领域使用率最高的算法之一[6]。模糊PID 可以在被控制对象的数学模型不够精确的条件下,根据被控制对象的特性和要求,通过调节比例Kp、积分Ki和微分Kd,实现控制的目的,给定值r(t)与实际输出值y(t)构成控制偏差e(t)=r(t)−y(t)。
理想的模拟PID 控制算法为:
式中,u(t)为PID 控制器输出的控制信号,e为控制偏差,Kp为比例系数,Ki为积分系数,Kd为微分系数。
在计算机控制系统中,只能根据采样时刻的偏差值计算控制量,所以不能直接使用模拟PID 控制算法,需要进行离散化。针对式(9)中的模拟算法,离散PID 表达式为:

4 控制系统参数的仿真
根据磁悬浮系统的特性,通过解析法对Kp、Ki、Kd参数进行选择,Kp、Ki、Kd参数选取不同,其动态性能差别很大。文章采用Matlab 软件,设置不同的Kp、Ki、Kd参数,计算控制系统的动态输出,寻求一组最优的控制参数。
由于篇幅限制,文章仅选用Y方向的控制器2 作为Matlab Simulink 仿真的目标,设磁悬浮间隙1.5mm,空气磁导率4π×10-7H/m,磁极面积1.35×103m2,位移刚度系数K1=-27×104,电流刚度系数K2=12.85,电流型功放的传递函数G1=0.6,位移传感器传递函数G2=8 500。根据被控制对象的特性和要求,选取三组不同的控制器参数进行仿真,见表1。

表1 控制器参数
文章选取电涡流传感器位移数值与时间为参考量,绘制其相互之间的曲线关系,判断系统的动态特性。从图6 可看出,空载情况下,当电梯初始化上电,Fa=3 430.2N 时,随时间阶跃响应曲线最终趋于给定值。模拟在电梯保持平衡状态下,电梯上下乘客突然向平台施加极限状态下的载重,即Fa=9 151.1N 时,阶跃响应曲线起初有较大波动,但之后迅速趋于稳定,如图7 所示。

图6 初始瞬间模型阶跃响应曲线
从图6、图7 可以看出,第3 组参数性能效果最佳,响应更加迅速,超调量更加平缓,调整时间在0.15s 内,且超调量小于20%。这表明经过参数调节的PID 控制器对升降平台的控制是符合设计要求的,即电梯平台建立的数理模型具有较好的可行性和可靠性。
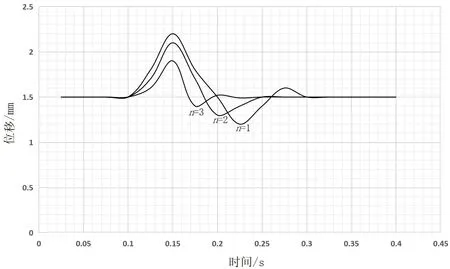
图7 载重瞬间模型阶跃响应曲线
5 结语
文章以力学与电磁学为基础,建立了基于螺杆式家用电梯轿厢磁悬浮导轨的三维模型,分析空载平衡状态以及载重情况下的轿厢受力情况,解析计算受力范围;设计了磁悬浮导轨分布式控制系统,并利用PID 控制器实现对线圈电流的控制,实现平台平衡所需的电磁力动态调节;借助Matlab 软件寻找出一组最优的PID 控制器的控制参数。这种磁悬浮导向系统,不仅使螺杆式家用电梯环保节能、舒适感加强、噪声小、高速,而且保留了传统螺杆式电梯的安全特性。
对于传统的磁悬浮电梯或者磁悬浮设备,国内外研究众多,但文章设计的磁悬浮导轨是通过水平方向的电磁力间接克服重力力矩实现平衡,而不是直接克服重力实现竖直方向的悬浮,这种水平方向的磁悬浮,为磁悬浮在电梯领域的应用提供了新思路。
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
机床与液压(2022年11期)2022-09-15
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(2021年4期)2021-06-15
装备维修技术(2020年15期)2020-11-28
东西南北(2018年14期)2018-10-16
中国科技教育(2016年12期)2017-08-11
中学生数理化·中考版(2017年1期)2017-03-29
科学与财富(2016年15期)2016-11-24
山东工业技术(2015年12期)2015-07-02