
基于智能移动端的农业土壤颜色识别应用研究
2022-03-22 00:21高梦泽费腾
安徽农业科学 2022年5期
高梦泽 费腾


摘要 有效测定农业土壤的颜色可以帮助获取其属性、发生过程、肥力等重要信息。而在传统土壤学中,土壤颜色的主要识别手段为肉眼比照孟塞尔土壤色卡。该识别方法存在主观性强、个体误差大、不便操作等问题。针对该情况,提出了一种基于智能移动端的农业土壤颜色识别应用,并完成了系统案例设计与实现。该系统可通过移动端自带的相机和闪光灯获取数据并计算其RGB均值,依据RGB-HV/C转换数据库对数据进行识别测试和结果显示。该应用具有易获取易携带、识别误差低、操作方便直观等特点。
关键词 农业土壤;土壤颜色识别;孟塞尔颜色体系;移动服务
中图分类号 S126 文献标识码 A
文章编号 0517-6611(2022)05-0215-05
doi:10.3969/j.issn.0517-6611.2022.05.054
开放科学(资源服务)标识码(OSID):
Application Research of Agricultural Soil Color Recognition Based on Intelligent Mobile Terminal
GAO Meng-ze,FEI Teng
(School of Resource and Environmental Sciences,Wuhan University,Wuhan,Hubei 430079)
Abstract Determining the color of agricultural soil effectively can help to obtain important information about its properties,development process and fertility.In soil science,Munsell Color System is mainly used to describe the color of soil,which needs to be compared with Munsell soil card to recognize.And this traditional method may lead to some problems such as strong subjectivity and large individual errors.In view of this,we proposed a portable soil color recognition system which was based on smartphones and android platforms.Containing RGB-HV/C conversion database,this system could obtain and recognize the soil data according to RGB average value.Experimental results showed that the system could get more accurate recognition results and make fewer mistakes.
Key words Agricultural soil;Soil color recognition;Munsell color system;Mobile service
基金项目 武汉大学研究生导师育人方式创新项目(20190024)。
作者简介 高梦泽(1995—),男,内蒙古包头人,硕士研究生,研究方向:地理信息系统移动服务技术、土壤监测、增强现实技术。*通信作者,副教授,博士,从事生态遥感和环境监测研究。
收稿日期 2021-06-01
颜色是土壤最重要的视觉特征,它可以很好地指示农业土壤的属性、发生过程和肥力,是土壤诊断分类和质量评价的重要指标。同时,我国面积广大,农业用地土壤复杂多样。因此,如何准确地测定农业用地的土壤颜色是一项十分重要的研究。
随着时间推移,农业土壤颜色测定时使用的颜色标准逐渐统一和完善。美国农业部(USDA)于1930年代采纳孟塞尔颜色空间为泥土研究的官方颜色描述系统。我国中国科学院南京土壤研究所也在1990年出版了依据孟塞尔颜色空间作为土壤颜色辨别的中国标准土壤比色卡[1]。孟塞尔颜色体系主要包括色调(H)、明度(V)和彩度(C),即常說的HV/C颜色空间。传统颜色鉴别作业中最主要的使用方法是基于孟塞尔比色卡[2]目测比色法。该传统方法由于操作员的个体差异,较为容易产生因主观因素、天气因素、光线因素和湿度因素的误判现象。因此,为提升农业土壤颜色测量精度的方向,研究人员进行了众多探索,如诸莉燕等[3]提出了一种通过对土壤照片进行图像处理获得土壤孟塞尔颜色的测定方式,有效缩小了辨别误差;陈剑科等[4]基于测色仪提出了一种在明度和彩度上误差较低的土壤孟塞尔颜色测定方式。
在计算机图像对农业土壤颜色贡献的方面,孟塞尔体系的HV/C体系与计算机颜色体系之间的转换也一直是一项重要的课题。岳智慧等[5]对基于分光色度仪的CIELAB值与孟塞尔颜色系统提出了一套二者的转换方法,为快速和定量获取土壤颜色提供了一项重要方法。龚睿琪等[6]基于计算机系统的RGB色度空间建立了其与HV/C颜色空间的转换数学模型,虽有一定误差,但仍有一定的参考价值。李怡春等[7]基于PLSR(最小二乘回归),预测土壤孟塞尔颜色建模效果,并与色系转换法进行比较,提供了一条土壤颜色获取的新途径。 Stiglitz等[8]基于颜色传感器设备NixTMPro,提出一套基于廉价设备的土壤颜色测定方法,并利用实验数据证明其在非潮湿环境下具有一定的使用价值。Mancini等[9]则基于NixTM Pro sensor,使用机器学习进行建模和土壤颜色预测,其中RF 模型的整体预测精度表现较为良好,有一定借鉴意义。以上方法均从不同的角度尝试通过优化算法和仪器获取高精度的孟塞尔土壤颜色获取方法,虽然相较传统肉眼识别有效地缩小了误差,但仍没能很好解决农业土壤测定流程中需要特定仪器采集数据、数据获取和分析分离且操作手段烦琐等问题。
随着21世纪20年代以来智能移动设备的高速发展,搭载高像素、高精度摄像头的智能移动端已经成为当今我国最为普及的便携式移动设备。因此,智能移动端的摄像头已经成为当前最易获得图像样本的工具;而移动端自带的闪光灯在校正后可作为稳定环境光源,即在一定程度上可以取代传统土壤颜色识别作业时的严格光照要求。因此利用移动端操作系统的开放性可进行图像处理及用户交互,使农业土壤颜色识别应用的硬软件集成在Android手機上成为可能。鉴于此,笔者提出了一种基于便携移动设备的农业土壤颜色识别应用,在保证系统易用性、简化操作流程等前提下兼顾孟塞尔颜色识别精度,并通过数据比照试验证明了该方法在有效提升便捷度和易用性的情况下保证了农业土壤颜色识别的精度。
1 应用系统设计方案
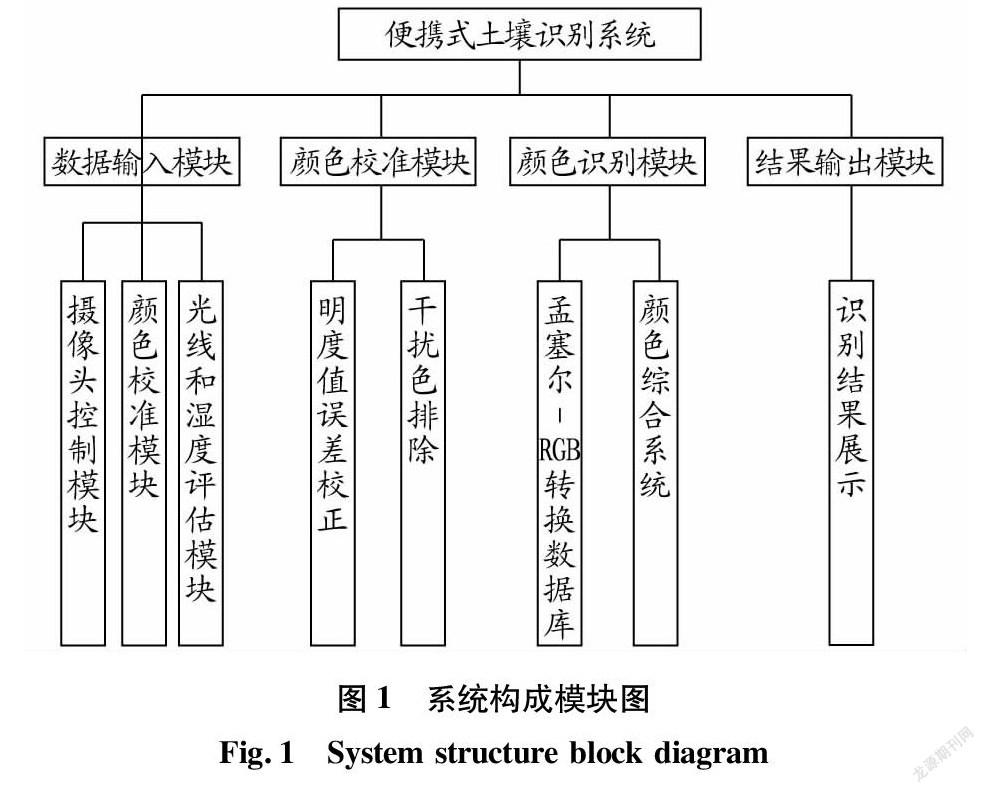
该应用的主体模块结构如图1所示,包含4个主要方面,即数据输入模块、颜色提取模块、颜色识别模块以及结果输出模块。
该研究以Android系统为例,使用Android Studio完成了基于便携移动设备的农业土壤颜色识别应用设计,实现了土壤样本数据收集、筛选、检测和识别等模块的结合。
1.1 数据输入模块
数据输入模块包含2个子模块,分别为摄像头控制模块和光线湿度评估模块。为了改善传统颜色识别作业时需使用特定光照设备进行严格光照的问题,该应用系统使用移动端自带的闪光灯作为光照设备。为减少获取数据质量的方差,通过预设照相机的焦距,统一规定照相机拍摄土壤样本所使用的物镜距离为20 cm。进入数据输入模块后,系统闪光灯默认为关闭状态,并会在采集数据时变为开启状态,准备进行数据采集。
由于过大的湿度会显著改变待测土壤的颜色,在数据采集前,系统会从手机后台提取天气中的湿度信息,如果当前预报的湿度超过正常检测环境的范围,会对用户进行提示,保证大气湿度适合采集。
此外,数据输入模块支持直接上传本地土壤数据,用于对已经采集好的土壤样本数据进行颜色识别。
1.2 颜色较准模块 颜色较准模块包含2个子模块,分别为明度值较准和干扰色点排除。
由于光线环境对于数据的明度值(V)有关键性影响,所以减少提取结果误差的重要前提之一是保证明度值提取准确。在初次采集数据前自动进入明度值校准模块。在20 cm处自动识别和采集预先定义好的白卡、黑卡和灰卡。系统会提取相机采集的白、灰、黑3张色卡的RGB值,并通过RGB明度计算公式获取其明度值,计算公式如下:
L=2.3(R255)2.2+(1.5G255)2.2+(0.6B255)2.21+1.52.2+0.62.2 (1)
根据3张色卡的明度值与理想环境下白、灰、黑3张色卡的明度值相比较,确认当前由于光线环境造成的明度误差值。试验结果表明,明度值V的误差值主要分布在1~3,且样本数据越接近纯黑色明度误差越低。
第2个子模块为干扰色点排除。因拍照获取的土壤样本图片中难免有杂质及阴影遮盖的部分,所以需要对图片样本干扰色点进行排除。具体的方法为枚举并遍历提取样本数据所有像素的RGB值并取平均,然后将与该平均RGB值差异大的像素点排除。筛除RGB值平均方差公式如下:
C= (-R)2+(-G)2+(-B)2(2)
式中,、、值分别为样本数据的RGB平均值,C值取20以内作为误差是否在范围内的依据,小于该值则认为该像素点会被保留。
通过上述2个模块,得到光线环境干扰和干扰色点排除后的土壤数据的平均R、G、B值,即土壤样本数据的综合RGB值。
1.3 颜色识别模块 颜色识别模块的主要原理为在获得了土壤样本数据的RGB值后[10],通过已建立的颜色转换数据库,将RGB值转换为对应的HV/C值。
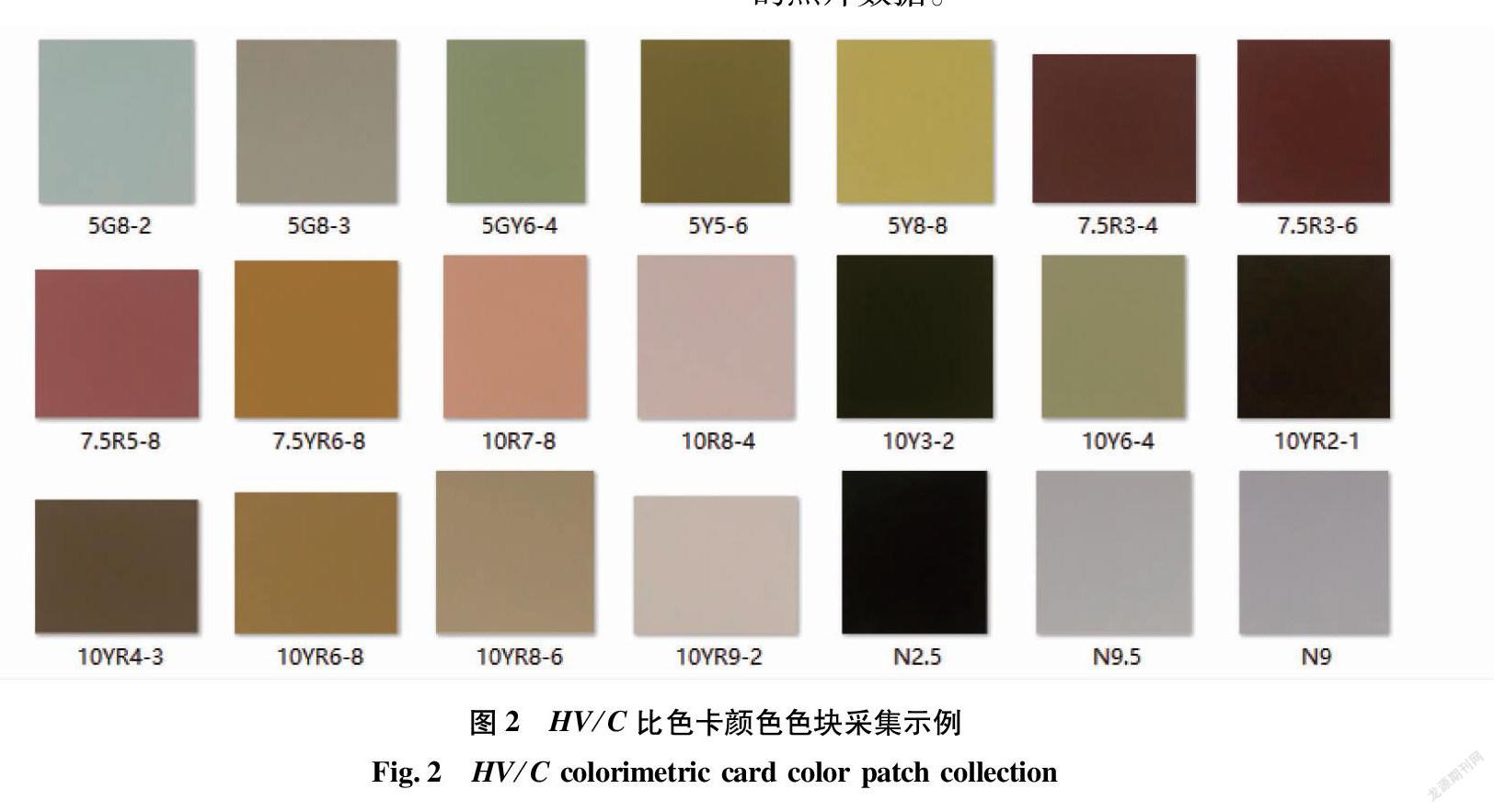
该应用系统的颜色转换数据库建立是通过遍历所有HV/C颜色确认其对应的RGB值实现的。在保证和“1.1”数据收集模块中相同的光线、湿度、拍摄距离的条件下,对孟塞尔标准比色卡进行样本收集。图2展示了部分标准比色卡的照片数据。
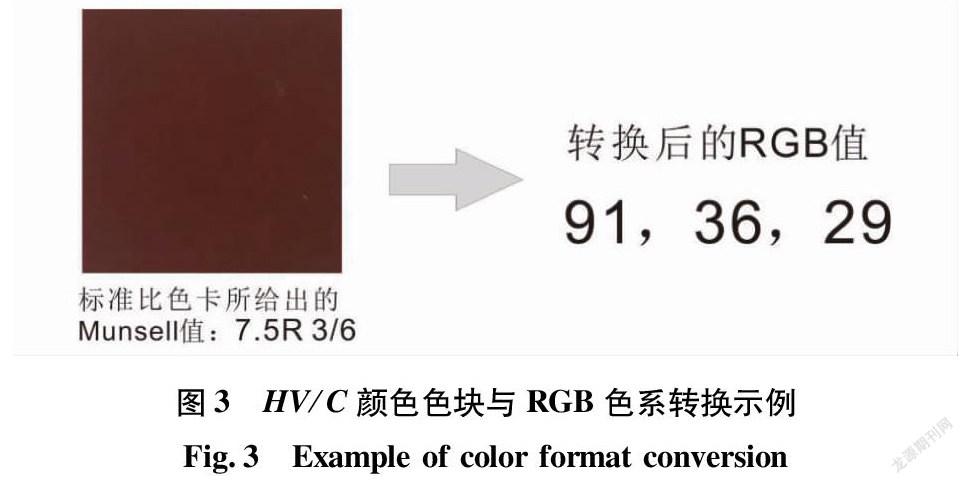
由于照相机的感光元件存在热稳定性差异,即使在上文提到的闪光灯补足的良好光线环境下对整块颜色进行数据采集,仍有可能出现少部分图像噪点。因此需要对上述获得的数据用相同的方法逐个进行噪点去除,然后计算得对应平均RGB值。图3展示了7.5R 3-6色块使用上述方法转换后所得到的RGB值。
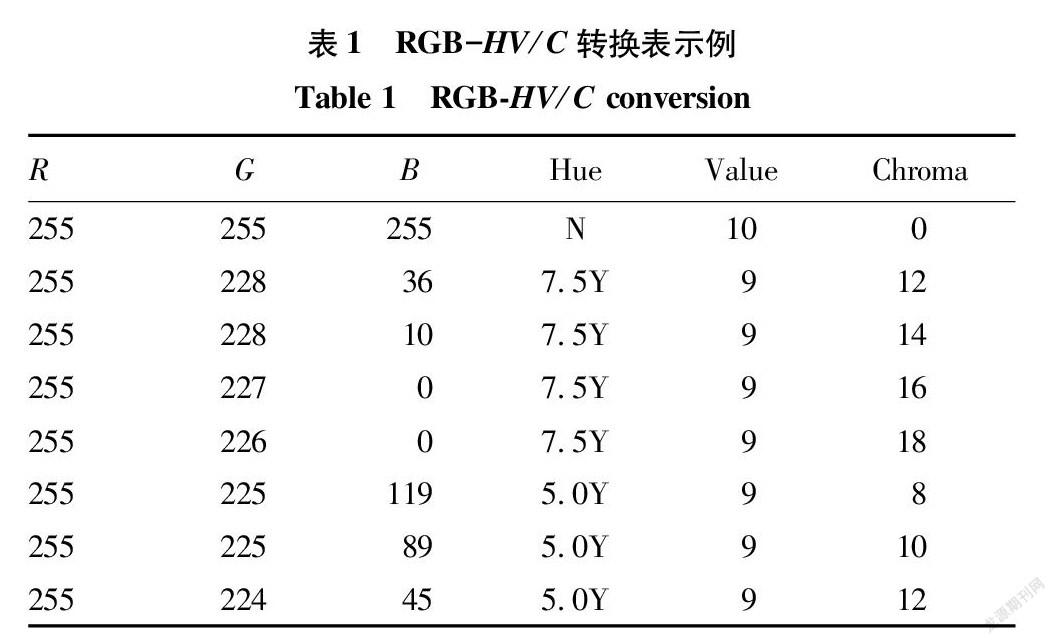
通过上述方法将对《孟塞尔土壤标准比色卡》中的13张孟塞尔土壤比色卡共440种颜色共多少张,多少种颜色,分别采集,建立1个查询表(look-up-table)工作可以完整的获取,从而获取所有标准孟塞尔颜色在电子设备上对应的RGB值。部分RGB-HV/C转换关系如表1所示。
由于比色卡枚举的是离散的颜色色块,查询表不可能包含所有可能的土壤颜色,且存在多个RGB值对应同一个HV/C的情况,因此采集的土壤样本颜色未必都在查询表中。
因而颜色识别模块需要对所获取的RGB颜色进行最临近颜色的查找。最临近RGB值的计算公式如下:
M=minki=1((R-R i)2+(G-G i)2+(B-B i)2(3)
式中,k为数据库全部颜色数据的数量,在该研究中为色卡中颜色数k为440。使用上述方法获得与数据库中样本最接近的RGB值后,系统将输出该接近值在数据库中对应的HV/C值,作为此RGB值对应的HV/C值。
1.4 数据输出模块
该应用系统数据输出模块用于向用户展示提取的颜色并呈现在系统界面中。在获取到颜色识别结果后,系统会将转换得到的色调值(H)、明度值(V)和彩度值(C)的具体数值以及其对应的颜色色块依次输出在显示屏上。
图4a展示了从移动设备本地获取土壤样本数据并进行识别后的结果,即取平均RGB值后得到的标准结果;图4b为使用了数据输入模块的照相机进行拍照并识别后的结果。
2 材料与方法
2.1 供试材料及处理
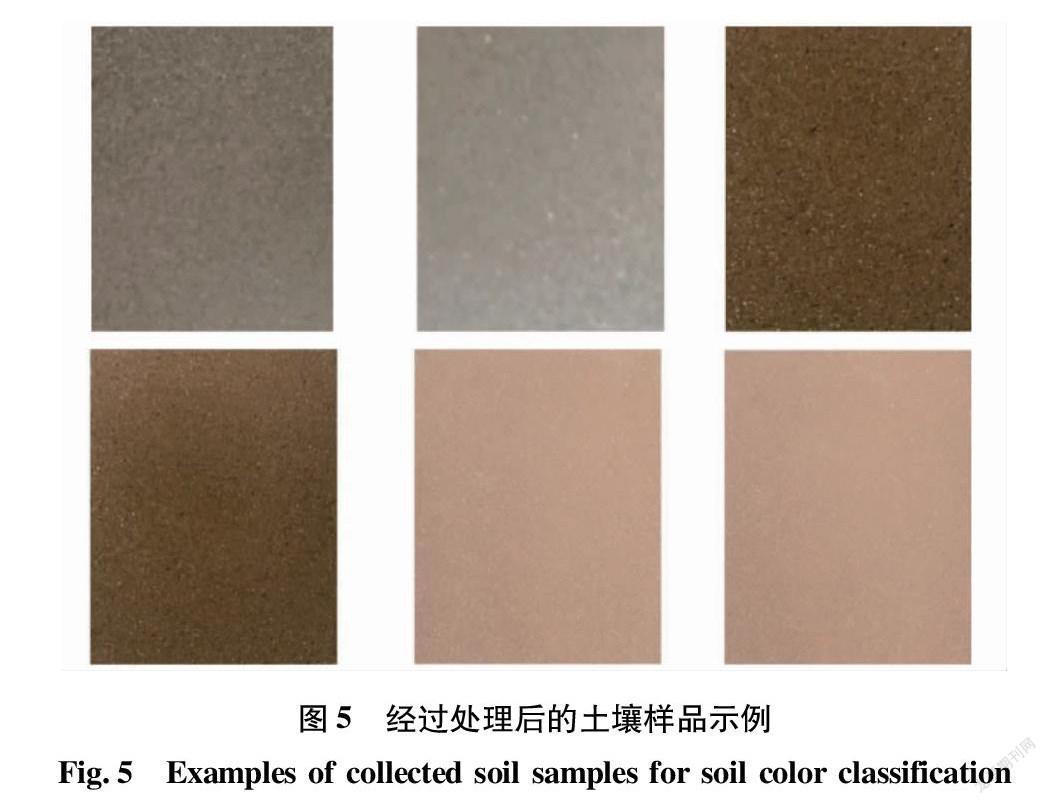
该试验材料为湖北省境内的红壤和水稻土等土样[11],共采样10个土壤剖面,且根据土壤剖面的上下层次,每个剖面根据土壤层次变化取3~6个土样,合计取得53个样本土壤。统一对样本土样进行风干、过筛等操作,进一步减少由于样本水分含量不同、含有部分杂质而造成的误差[12-13]。部分经处理后的土壤样品示例如图5所示。
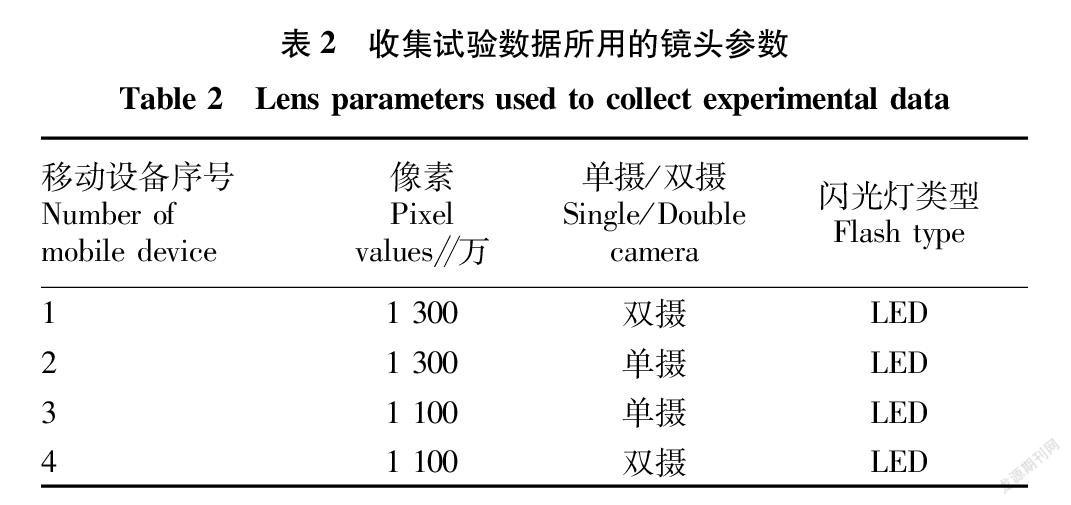
該试验所使用的便携移动设备为携带不同型号镜头的多台智能手机,镜头的参数如表2所示。
2.2 土壤标准颜色与试验颜色测定 第1部分数据为目测法数据。该试验的试验者均无视觉疾病和障碍,并具备判别土壤颜色的基本能力。在天气晴朗时的标准自然光下,利用《中国标准土壤色卡》进行比色工作[14]。陈剑科等[4]认为,目测比色法的时段应控制在日出3 h后至日落3 h间,并将该
时段的光线条件视作标准自然光,该研究延续了这一做法。
值得注意的是,目测时周围环境无大面积彩色场景且确定土壤范围的卡框颜色应与土壤样本基本保持一致,防止对实验者颜色辨认产生干扰。为尽可能避免和减少目测法获得数据的误差,该试验的同一样本由3位不同的实验者进行判别,当结果的色调值(H)相同、明度(V)和色度值(C)差别样本极差在3以内时,认为个体判别差异在误差阈值内,取平均值得到该样本的最终HV/C值,作为该样本的实测值。若超过阈值则此样本数据待定并重新以上述方法进行测定。
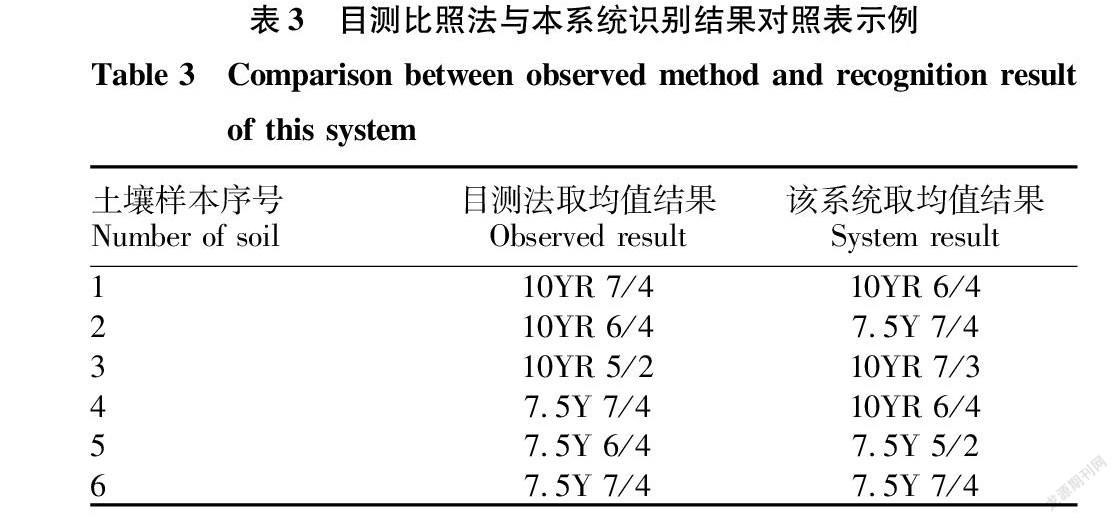
第2部分为使用该研究提出的应用系统进行颜色采集和识别。保证在与第1部分光线、湿度完全相同的试验环境下,对相同样本进行颜色识别。保持物与镜距离始终为20 cm,依次执行颜色输入、颜色较准和颜色识别单元,对同一个样本进行3次采集和识别,当结果色调值(H)、明度(V)和色度值(C)差别在误差阈值3以内时认为该次采集有效,取平均值作为该土壤样本的HV/C数据(表3)。
3 测试与讨论
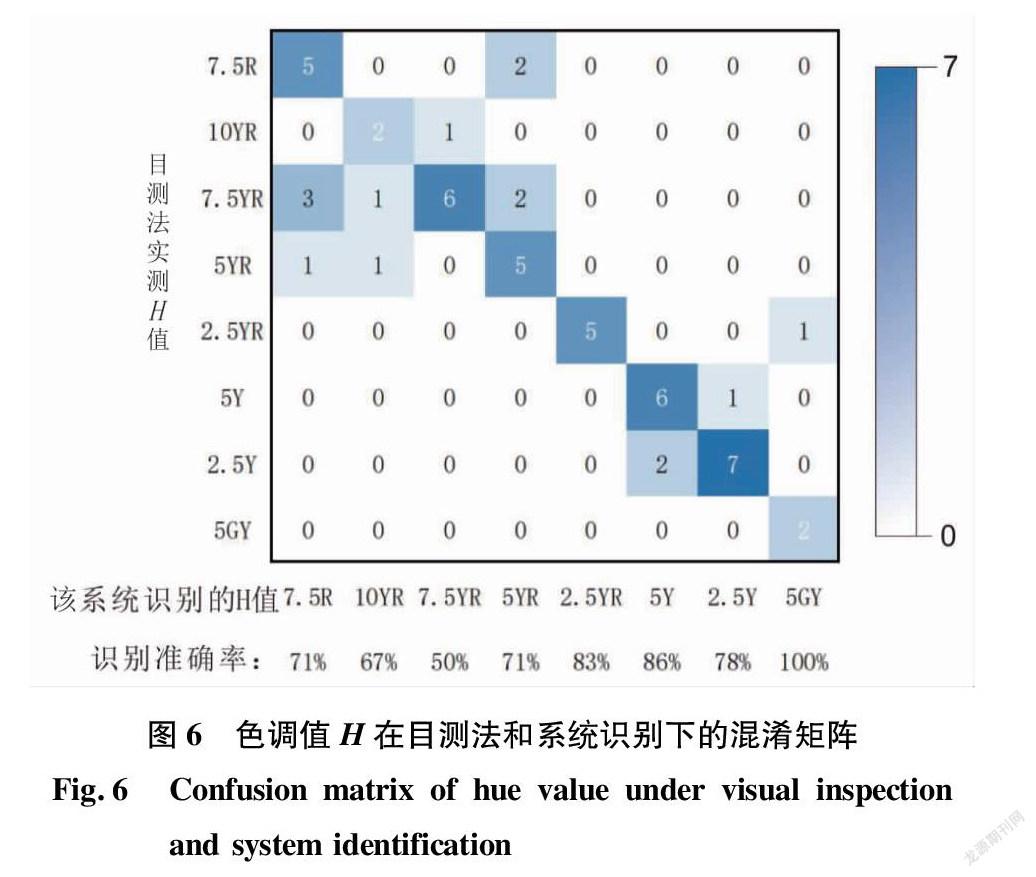
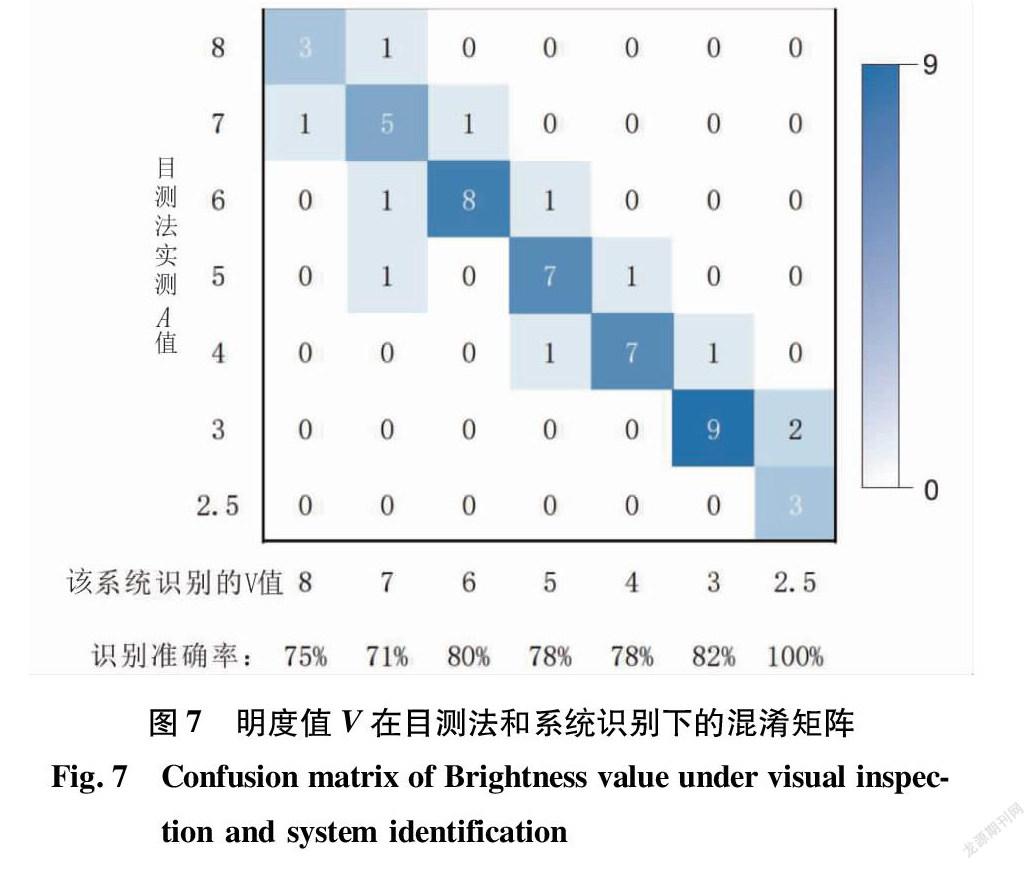
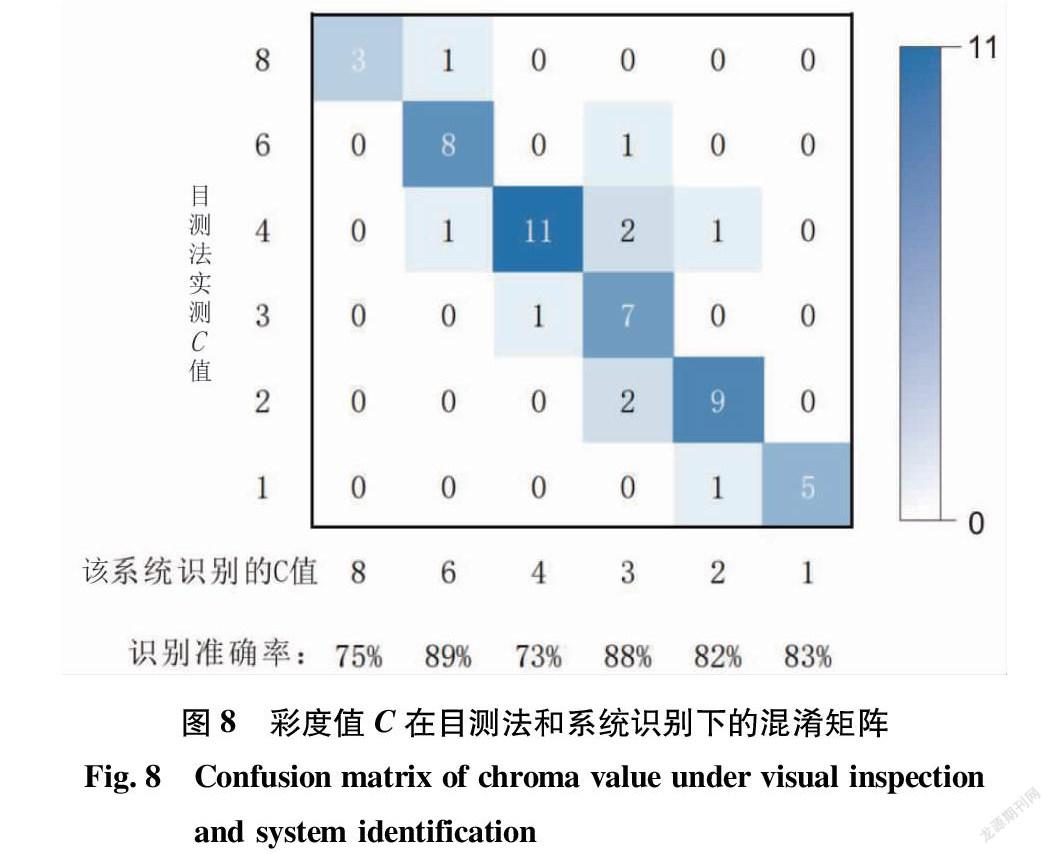
3.1 色调、明度和彩度提取结果评估 将目测法得到的实测数据与该应用系统识别所获得数据按照色调、明度和彩度3类分类,分别制作混淆矩阵,结果如图6、7、8所示。
由图6可知,色调值H的整体识别结果集中在矩阵的对角线以及附近的两侧,说明该系统对于色调值H的识别误差不大。对于每个色调值具体的准确率,该系统对7.5R、5.0YR、2.5YR、5.0Y、2.5Y和5.0GY色调的识别准确率在70%以上,较为优秀;对10YR、7.5YR色调的识别结果准确率则较为一般。计算可得该系统对色调值的平均总准确率为72%,总体来说该系统对色调值的识别有一定参考价值,但仍有一定优化空间。
由图7可知,明度值V的整体识别结果高度集中在矩阵的对角线上,说明该应用系统对于明度值V的识别准确率较为理想。识别有误差的数据分布在与矩阵对角线相邻的位置,说明该系统对明度值V的识别误差值较小。该系统对所有明度值的识别准确率均在70%以上,结果优良;对明度值2.5、3.0和6.0的样本准确率则在80%以上,较为优秀。计算可得该系统对明度值V的平均总准确率为79%,总体来说该系统对明度值的识别准确率较为理想。
由图8可知,彩度值C的整体识别结果总体集中在矩阵的对角线上,说明该系统对于彩度值C的识别准确率较为理想。该系统对所有明度值的识别准确率均在70%以上,结果优良;对彩度值1、2、3和6的样本准确率可达80%,较为优秀。计算可得本系统对彩度值C的平均总准确率为81%,总体来说该系统对彩度值的识别准确率较为理想。
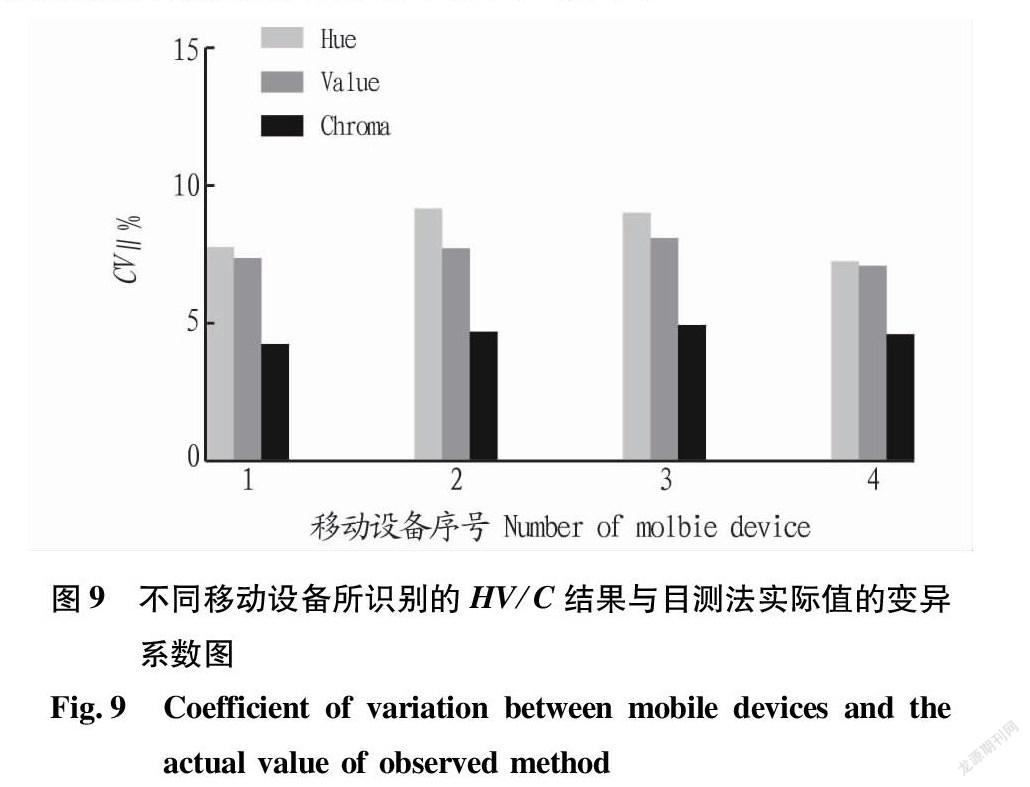
3.2 数据收集硬件属性影响评估 将该系统识别所获得数据按照表2的4种相机型号进行分类,并与目测法得到的实测数据进行比照,计算结果如图9所示。
根据图9并结合表2可知,双摄像头相较单摄像头可以降低预测结果值的离散程度,但整体区别并不明显;在1 000万量级的像素下,像素对于土壤颜色提取没有明显影响。此外,由于目前移动设备的摄像头像素值均可达到1 000万量级,该研究不再探究百万和千万级像素的摄像头对提取结果的影响。
4 结语
针对我国农业土壤面积广大、农业用地土壤复杂多样的特点,以及土壤颜色识别主观性强、个体误差大、作业仪器不易获取等问题,该研究基于孟塞尔颜色体系以及便携移动设备提出了一种农业土壤颜色识别应用系统。以Android系统作为实验平台,在提升孟塞尔颜色识别精度的前提下兼顾易用性、操作流程等方面。该应用有效降低了土壤颜色获取的操作门槛,提升了作业效率。
该研究通过数据比照试验证明了该方法在有效提升便捷度和易用性的情况下可以保证农业土壤颜色识别的基本精度。经测算,该系统识别色调值(H)的总体精度为72%、明度值(V)的总体精度为79%、彩度值(C)总体精度为81%,总体识别精度优秀,在农业土壤颜色识别作业中具有一定实际应用价值。
此外,该研究也通过对照试验探究了数据收集装置硬件参数不同时对实际识别结果所产生的影响。结果表明,在1 000万量级的像素下,像素对于土壤颜色提取没有明显影响。镜头数量方面,双摄设备的识别效果略优于单摄设备。灯光条件方面,该研究提出了使用移动设备自带的LED闪光灯作为光照条件的方案,并通过试验验证其可行性以及具体的操作方法。
目前,该应用已经开发并实现了文中描述的基本功能,但仍有需要进一步完善的方面。在之后的研究中将针对不同机型的摄像头对颜色转换数据库进行RGB值误差矫正工作,继续优化识别算法以获得更精确的色调值,进一步探究获取土壤样本数据时便携移动设备的最佳环境条件。
参考文献
[1]中国科学院南京土壤研究所,中国科学院西安光学精密机械研究所.中国标准土壤色卡[M].南京:南京出版社,1989.
[2] 龚子同.中国标准土壤色卡[M].乌鲁木齐:新疆人民出版社,1990.
[3] 诸莉燕,毕利东,柳开楼.基于图像处理的土壤颜色判别方法研究[J].广东农业科学,2018,45(12):125-130.
[4] 陈剑科,袁大刚,晏昭敏,等.测色仪与中国标准土壤色卡测定土壤颜色比较:以川中丘陵区为例[J].土壤学报,2019,56(1):78-89.
[5] 岳智慧,黄强,肖理,等.土壤颜色由CIE向Munsell系统的定量转换[J].光谱学与光谱分析,2019,39(9):2842-2846.
[6] 龚睿琪,盛建平.从孟塞尔颜色空间到RGB的转换[J].工业控制计算机,2019,32(1):85-86.
[7] 李怡春,潘恺,王昌昆,等.基于PLSR的土壤颜色预测方法及其与色系转换法的对比研究[J].土壤学报,2018,55(6):1411-1421.
[8] STIGLITZ R,MIKHAILOVA E,POST C,et al.Evaluation of an inexpensive sensor to measure soil color[J].Computers & electronics in agriculture,2016,121:141-148.
[9] MANCINI M,WEINDORF D C,MONTEIRO M E C.From sensor data to Munsell color system:Machine learning algorithm applied to tropical soil color classification via NixTM Pro sensor[J].Geoderma,2020,375:1-11.
[10] 楊转.基于HSI颜色模型的杂草与土壤背景分割方法研究[J].河北农业大学学报,2011,34(4):124-127.
[11] LIU F,ROSSITER D G,ZHANG G L,et al.A soil colour map of China[J].Geoderma,2020,379(8):1-10.
[12] CALZOLARI C,UNGARO F,VACCA A.Effectiveness of a soil mapping geomatic approach to predict the spatial distribution of soil types and their properties[J].CATENA,2021,196:1-13.
[13] 黄昌杰,张金川,丁文龙,等.基于孟塞尔系统岩石颜色定量分析研究[J].科学技术与工程,2016,16(25):254-260.
[14] 余建军,陈沅,白晓梅,等.《中国标准土壤色卡》 中芒塞尔颜色系统的建立[J].土壤学报,1979(4):212-214.
