
车辆碰撞预警系统对行车风险的干预效果*
2022-03-20 14:42:32高健强刘建蓓赵超杰刘国图
交通信息与安全 2022年1期
许 甜 高健强 刘建蓓 赵超杰 刘国图
(1.中交第一公路勘察设计研究院有限公司 西安 710065;2.同济大学交通运输工程学院 上海 200092)
0 引 言
据统计,在道路交通系统中,93%以上的交通事故与人的因素有关[1]。为提升驾驶安全性,近年来,多种先进的驾驶员辅助系统(advanced driver assistance system,ADAS),如前向碰撞警告、自动紧急制动、自动巡航、车道偏离预警等已被广泛应用。这些系统主要是基于多元车载传感器,监测车辆运行特征和驾驶员实时状态并对运行风险进行预测,在目标预警指标小于一定阈值时向驾驶员提供相应的声、光或触觉预警信息[2]。在实际应用中,大部分的ADAS使用者认为可靠的系统能够有效提升驾驶安全水平,一些实验室仿真测试数据和实际场景中的统计对比分析也表明ADAS技术将明显降低碰撞事故发生率[3-4]。
国外部分汽车厂商为评估车辆内置ADAS系统对交通安全改善的实际效果进行了一些基于实车试验和统计分析的研究。Adell等[5]针对SASPENCE预警系统,招募20名试验人员在都灵50 km市郊道路和高速公路开展系统开启、关闭情形的自然驾驶对比试验,通过行驶数据分析发现预警系统对减少报警次数、报警时长、驾驶员对障碍物反应时间有积极作用,但采用车内观察法时发现小间距跟驰事件数量虽趋于减少,却无统计学意义。Spicer等[6]采用Cox回归模型对106万辆宝马汽车的15 507次中、重度事故数据进行统计分析,发现配备ADAS的车辆比未配备的发生碰撞的可能性低23%。另一项针对沃尔沃乘用车的统计研究发现[7]:配备车道偏离预警系统的车辆在限速大于70 km/h的道路上发生伤害性正面碰撞或单车碰撞的事故减少了53%。
我国学者也在不同类型真实道路上进行了一些实车测试,以期研究符合国内道路条件和驾驶人特性的预警系统效果及驾驶风险影响因素。Li等[8]通过33人·次的自然驾驶实验,分析了驾驶员性别、年龄、攻击性效应与ADAS总报警次数、每百公里报警次数的关系,并对比了驾驶员对前向碰撞预警、车道偏离预警、侧向盲区预警接受程度。杨曼等[9]招募了30名测试人员进行实车试验,构建了行车安全事件数据库,利用Logit回归分析法得出平均减速度、事件类型、事件原因、天气、年龄、驾龄6个因素对驾驶风险有显著影响。
上述基于实车试验的研究,多采用统计对比分析和主观问卷调查方法得出定性或趋势性结论,但并未深入揭示预警系统对驾驶员行为特征和风险影响机理的定量化表达。因此,一些学者采用驾驶模拟仿真方法,提取与运行风险特征相关的微观驾驶行为参数并进行碰撞预警有效性验证。Wang等[10]利用33名驾驶人在60 km城市快速路的自然驾驶特征数据构建数据库,并利用仿真系统分析得到关闭和开启自适应巡航系统时,车头时距(time headway,THW)平均值从1.4 s增加到2.5 s,但碰撞时间(time to collision,TTC)没有显著变化。王雪松等[11]利用8自由度高仿真驾驶模拟器研究了追尾临撞工况紧急程度对驾驶员避撞行为的影响,对比了不同车头时距情况下驾驶员感知反应时间、制动延误等。吕能超等[12]利用UC-win/Road驾驶模拟仿真软件进行测试,通过对比不同算法的预警准确率、最小碰撞时间等指标来评估预警算法的有效性。
基于仿真实验进行预警系统对驾驶行为指标影响的定量分析,相较实车试验虽具有数据颗粒度细、参数易标定等优势,但无法完全表征真实交通流场景下驾驶员的行为特征变化。另外,既有研究成果在进行预警效果评估时,由于仅能获取自车数据,均采用车辆交互行为指标,而缺少面向交通流的运行风险特征指标。因此,本研究采用实车群组试验,在真实高速公路场景模拟跟驰过近、危险超车等典型风险运行条件,开展预警系统开启、关闭情形下对比试验,通过采集的群组车辆高精度定位数据,分析行车安全事件下车辆交互行为指标和面向交通流的风险特征变化,并以问卷调查形式获取驾驶员对预警系统的认可度,从而对车辆碰撞预警系统对行车风险的干预效果进行多维度综合评估。
1 试验设计
1.1 总体方案
本研究以15辆安装高精度定位预警终端的车辆为试验车,形成车辆群组在高速公路试验路段运行。试验分为预备试验和正式试验,经培训后,试验人员首先进行20 km预备试验,用于熟悉路段,检测车载终端是否正常工作,熟悉预警系统语音提示,以及适应保持群组运行状态。正式试验分2次进行,第1次预警终端语音提示功能关闭,但后台仍记录数据,第2次语音提示功能开启。为模拟典型风险场景,车辆在行驶中需按要求执行既定数量的变道、减速、流入/流出等任务。
通过车载预警终端采集的高精度定位、速度信息,并与试验路段矢量地图车道线信息匹配,可进行驾驶行为分类和行车安全事件提取,进而对交互行为指标和交通流特征指标进行对比分析。试验完成后,每位试验人员需根据试验情况如实填写调查问卷,以便了解其对预警系统的认可度。
1.2 被试对象
试验的被试对象是1种基于高精度定位的车辆碰撞预警系统,由路侧北斗地基增强系统、车载高精度定位预警终端、搭载厘米级高精度地图数据和冲突预测算法的短临预警平台组成[13]。该系统经第三方专业机构检测,动态定位三维精度可达10 cm以内,碰撞预警功能满足JT/T 883—2014《营运车辆行驶危险预警系统技术要求和试验方法》。
其工作原理为:车载装备通过获取北斗地基增强系统提供的差分信号,以1~10 Hz解算并上传车辆高精度定位、速度信息(综合考虑平台计算实时性和轨迹拟合精确性要求,将频率设置为5 Hz);预警平台利用历史定位数据拟合车辆轨迹,并预测车辆以当前速度及航向角沿拟合轨迹行驶时目标时刻(当前时刻后3,2,1 s)的车辆位置,并判断交互车辆是否会发生轮廓冲突;平台向风险相关车辆下发分级语音预警,预警等级分为3级,与目标时刻相对应,发生冲突风险的时刻越近,预警等级越高,其中1级为最高级别预警。预警系统工作流程见图1。
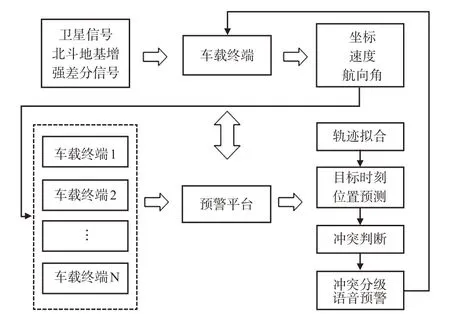
图1 预警系统工作流程示意图Fig.1 Diagram of early warning system workflow
1.3 试验车辆及人员
本研究所采用的试验车均为自动挡小型客车,并在驾驶舱内加装基于高精度定位的车辆碰撞预警终端。为便于参试人员辨认试验车辆并保持群组运行,对试验车辆四周均进行易识别的外观标记。为排除性别、驾驶专业程度等因素对预警效果评估的干扰并保证试验安全性,试验车的驾驶人员均为年龄从25~55岁的男性职业司机,试验开展前,对参试人员进行驾驶路线、驾驶任务、终端工作状态、语音预警内容等培训。图2为车内预警终端和车辆群组运行情况。

图2 车载预警终端及平台Fig.2 On board early warning terminal and platform
1.4 试验路段及场景设计
试验路段位于广东省新博高速,起点为蓝田互通(K858+688),终点为龙江互通(K886+832),路段长度30 km,设计速度120 km/h,双向6车道。2次对比试验中,试验车辆均往返行驶1次,每次试验里程约为60 km,试验时间约50 min,试验路线见图3。本次试验在该高速公路开通后不久开展,背景交通量较小(据资料,进行试验时服务水平为一级,自由流状态),便于进行车辆群组试验和典型风险场景模拟。为保证运行安全,试验均在天气晴好、视线良好的条件下展开。
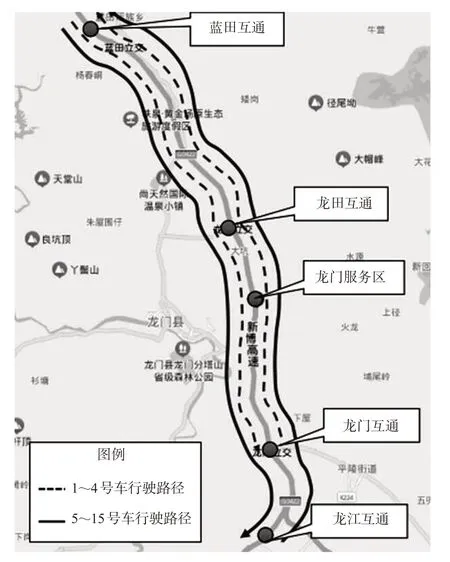
图3 试验路段及行驶路径Fig.3 Test section and driving paths
试验中,要求车辆以80~100 km/h的速度保持群组形式运行,并尽量减少其他社会车辆对群组的干扰。为模拟实际交通流条件中的典型风险事件,在运行过程中,给试验车辆规定执行减速、变道超车、流入/流出等任务,具体任务分工见表1。

表1 试验车辆驾驶任务分配Tab.1 Driving tasks assignment of test vehicles
2 数据处理与分析
试验获取的原始数据主要包括通过车载终端和平台采集到的车辆实时运行状态数据和试验路段线位数据。为进行后续行车安全事件提取和运行风险干预效果评估,对原始数据进行处理分析,包括车路映射关系分析、车车交互定量描述等。采集原始数据及预处理的数据见表2。

表2 采集原始数据与预处理数据一览表Tab.2 List of original data and preprocessed data
2.1 车辆坐标与道路位置映射
为判断车辆交互关系进而提取典型行车安全事件片段数据,利用车辆定位数据和高精度地图中的道路中线矢量信息进行车、路位置映射。采用长安大学潘兵宏等[14]提出的优化定位搜索算法,计算t时刻任意车辆i对应的路线桩号S ti和横向净距Dis_h ti,其主要步骤为:已知1个车辆坐标B(x,y),从道路起点以0.001 m为步长,连续计算A k点和A k+1点,做B点到路线上任意一点切向方向的垂足C并计算AC;如果AkCk与Ak+1Ck+1异号,采用二分法继续缩小搜索区间,直到搜索区间长度小于0.001 m结束搜索运算;则P点桩号为该车辆位置对应的路线桩号S ti,BP为横向净距值Dis_h ti。里程桩号S ti、横向净距Dis_h ti分别表征车辆相对试验道路中线的纵向、横向位置,形成任意时刻t试验车辆和道路的映射关系。该算法的几何模型示意图见图4。
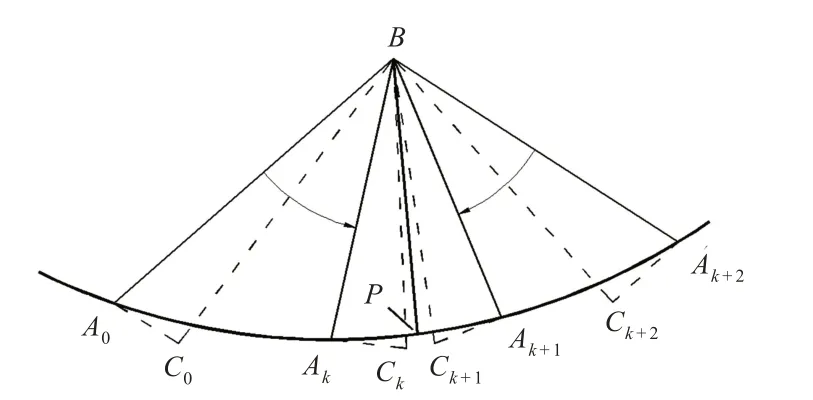
图4 搜索算法几何模型Fig.4 Geometric model of search algorithm
根据试验道路的横断面参数,建立横向净距Dis_h ti与车道位置Lti对应关系,见式(1)。

式中:Lti为t时刻车辆i所处车道位置,Lti=[1,2,3],1为最内侧车道,以此类推;Dis_h ti为试验车辆相对于道路中线的横向距离,m;「」为计算值向上取整。
根据上述优化定位搜索算法和横向净距与车道位置对应关系,使用Python编写试验车辆与道路位置的映射函数,快速求出任意时刻t任意车辆i对应道路中线的里程桩号S ti和车道位置Lti,用于判断车辆交互关系、车路位置关系,进而评估车辆交互和交通流风险特征指标。
2.2 车辆交互行为定量描述
对于高速公路上行驶距离较近而产生交互关系的前后车辆,当存在碰撞风险时,后车为避免与前车碰撞,可能采取的避险行为包括减速后跟驰、减速后换道、超车换道这3种。由于减速后换道与前车无时空冲突风险,且在换道的前一瞬间仍属于减速跟驰行为,因此可进一步简化为减速跟驰和超车换道2类避险行为[15-16]。2类行为的车辆运动方式、交互特征存在较大差异,因此本研究在车路位置映射的基础上,根据试验车辆群组中产生交互关系的前后车相对速度、加速度、车头时距、方向角等数据,将跟驰、换道这2类行为进行识别后,再分类对风行特征指标进行对比分析,从而获得更精确的行车风险干预效果评估结论。
1)跟驰行为识别。对于同一时刻,相同车道上距离前车最近的后车可判断为跟驰车辆。跟驰模型采用GM通用的GHR模型[17],见式(2),将2车的相对速度作为刺激,后车的加速度作为驾驶人的反应,并将后车速度和车头间距作为敏感系数的影响因素,描述2车运动状态下的跟驰行为。加速度为正值时,跟驰车辆处于加速行驶状态;加速度为负值时,跟驰车辆处于减速行驶状态。

式中:V n为后车速度,km/h;an为后车加速度,m/s2;ΔV n为前后2车的相对速度,km/h;ΔXn为前后2车的车头间距,m;τn为反应时间,s;n为第n辆车(即后车);α,β,γ为参数。
2)换道行为识别。根据车辆和车道线的位置关系,车辆换道行为分为前期准备、执行换道、持续换道3个阶段,其中持续换道阶段行车风险最高,见图5。当车辆从行车道中心持续向一侧偏移时,可认为车辆开始执行换道。根据贺玉龙等[18]提出的换道最小安全距离模型,可判断任意t时刻试验车辆m的安全换道行为,见式(3)。
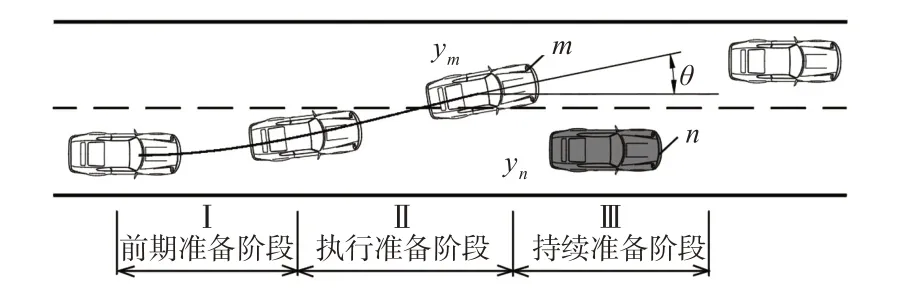
图5 后车的超车换道过程示意Fig.5 Schematic diagram of overtaking and lane changing process of rear vehicles

式中:Lm为m车的长度,m;W m为m车的宽度,m;Ln为n车的长度,m;θ为t时刻m车行进轨迹切线与车道线的方向夹角。
2.3 行车安全事件提取
在行车风险的研究中,一般采用临近碰撞(near-crash)和碰撞(crash)来区分行车风险事件[19]。crash是小概率事件,且near-crash是需要采用迅速且及时的处置操作才能避免碰撞事故发生。因此,crash和near-crash事件发生频次少,存在样本量严重不足的问题,无法更好地用于行车风险评估。国外相关学者研究发现,行车安全事件(critical-incident events,CIEs)发生频率高(crash的100倍;near-crash的10倍)、严重程度比near-crash小,可由高加/减速度、较小的车头时距或其他运动特征描述,可作为风险度量指标[20]。
既有研究表明,车头时距小于5 s的车辆处于跟驰状态[21],可认为前后车头时距小于5 s时,2车即已发生交互。为简化运算过程,本研究以此为标准进行群组间风险相关车辆的筛选。将车头间距小于5 s的车辆交互过程片段进行提取,定义该片段内跟驰、超车换道过程中跟车距离最小的瞬间为CIEs,以表征前后车辆交互过程中最不安全的瞬时状态,进而提出2类行为CIEs提取准则,见表3,及CIEs的提取流程,见图6。
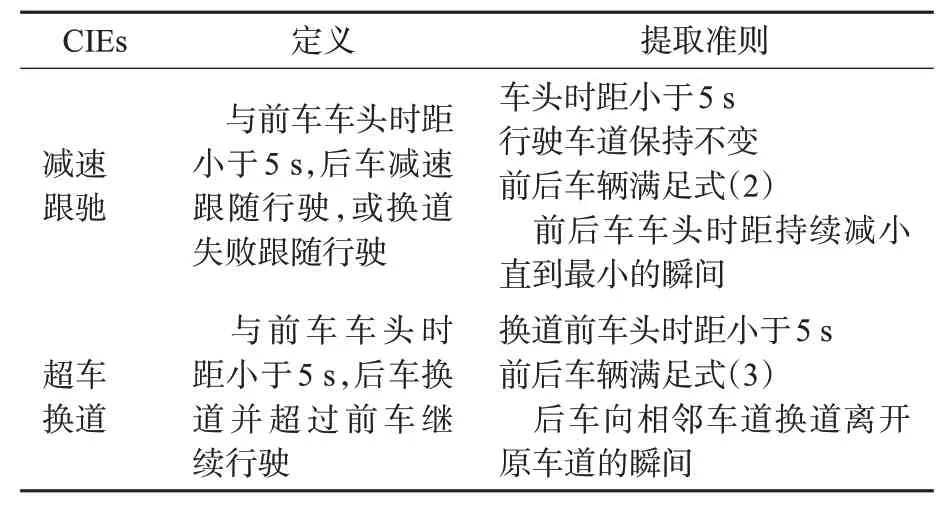
表3 2类典型CIEs定义及提取准则Tab.3 Definition and judgment of two types of cies
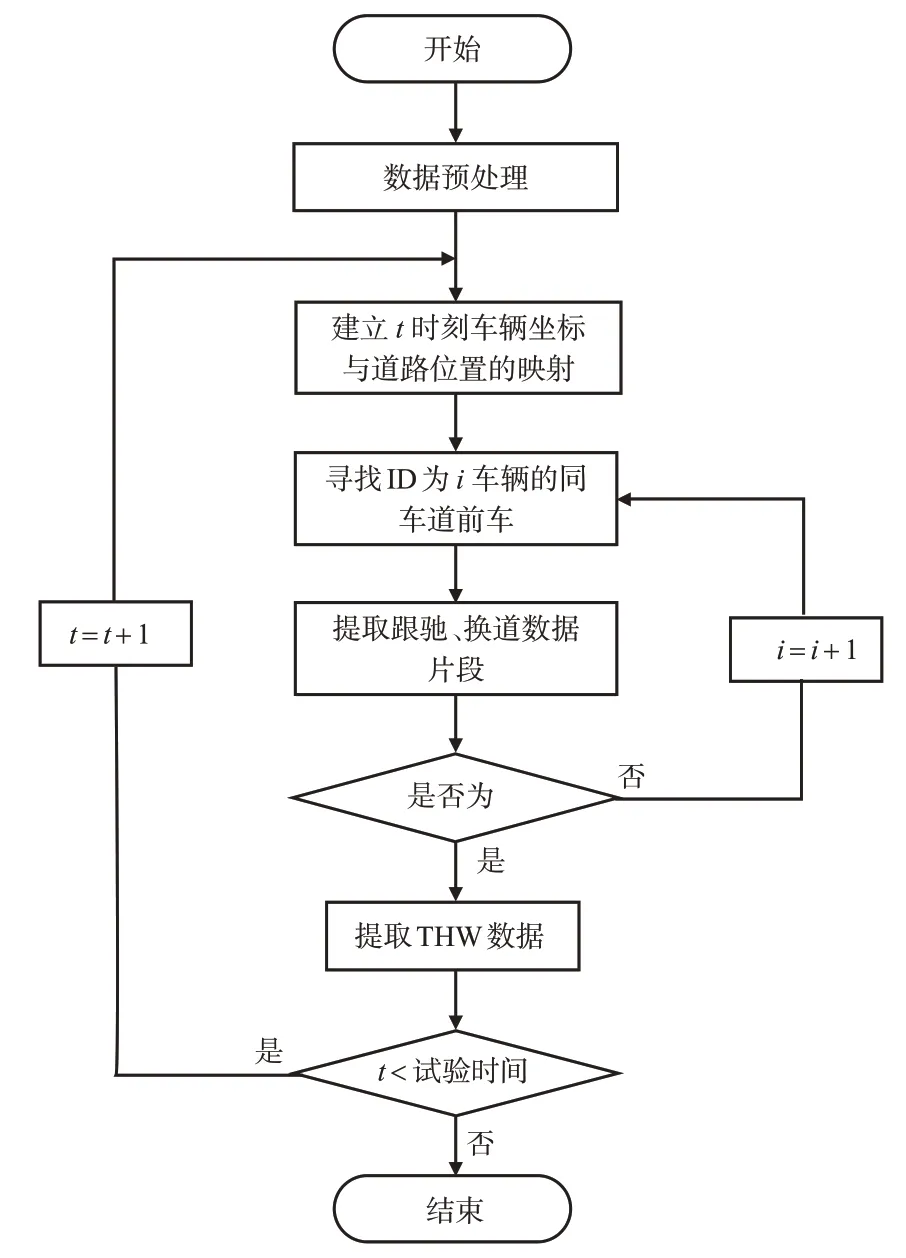
图6 CIEs事件提取流程图Fig.6 Flow Chart of Extracting CIEs
根据CIEs定义及提取方法,使用Python编写事件判别函数,从无预警情形、有预警情形2次对比试验采集的海量车辆群组实时位置数据中,提取减速跟驰、超车换道这2类车辆交互片段数据和CIEs发生时刻的THW。最终总共得到1 089组符合标准的CIEs,其中无预警试验中共有601组,有预警试验中共有488组,具体CIEs提取情况见表4。
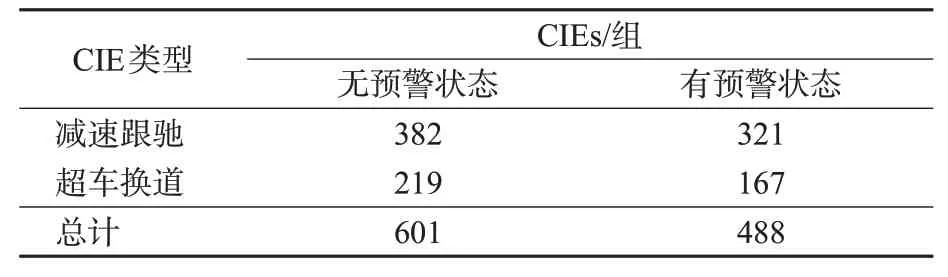
表4 CIEs提取结果汇总情况Tab.4 Summary of CIEs Extractions
3 运行风险干预效果分析
3.1 对CIEs车辆交互特征影响分析
车头时距是表征车辆微观运行风险的常用指标。本研究利用无预警、有预警试验中提取到的车辆群组内减速跟驰、超车换道这2类CIEs样本数据,分别对CIEs下的THW,即最小THW进行统计及对比分析,通过对比预警开-闭情形下最小THW的分布特征变化,评估预警系统对微观层面车辆运行风险的干预效果。
图7和图8分别是减速跟驰、超车换道这2类避险行为中,行车安全事件下THW的概率密度分布情况。从图中可以看出,有预警情形下的概率密度分布较无预警情形下整体右移,表明预警系统开启时,试验车辆群组总体THW呈增加趋势。
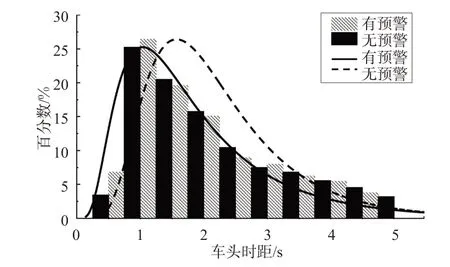
图7 有、无预警情形下减速跟驰行为车头时距分布Fig.7 Headway distribution of deceleration following behavior warning and no-warning
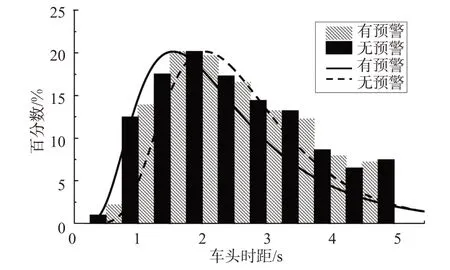
图8 有、无预警情形下超车换道行为车头时距分布Fig.8 Headway distribution of overtaking behavior warning and no-warning
图9为无预警、有预警情形下,减速跟驰、超车换道2类行车安全事件THW的箱型对比图。从图中可以看出:减速跟驰行为中,预警系统开启后,行车安全事件THW均值从1.56 s增加至1.93 s,增加了0.37 s;超车换道行为中,预警系统开启后,行车安全事件THW均值从2.18 s增加至2.52 s,增加了0.34 s。
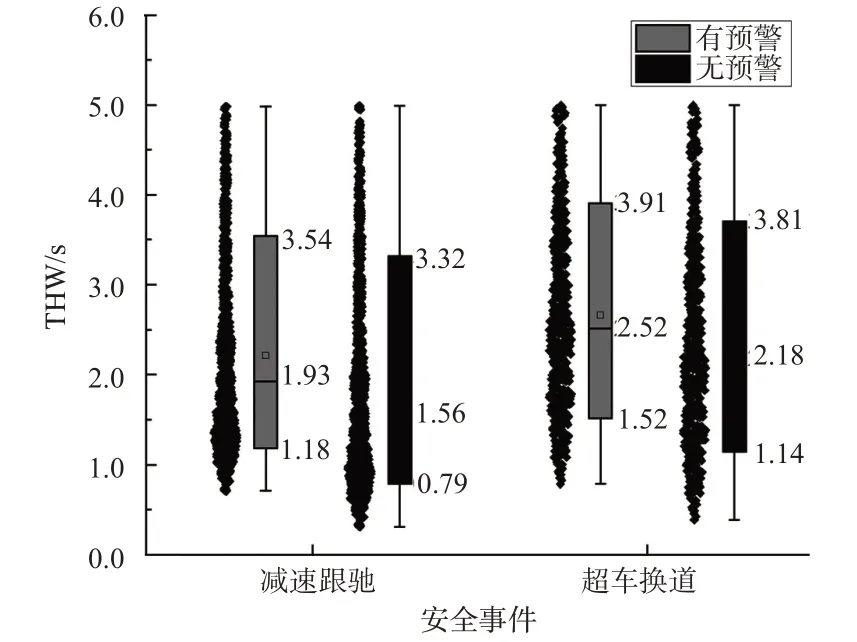
图9 有、无预警情形下CIEs车头时距箱型对比图Fig.9 Comparison of cies headway box type of warning and no-warning
为进一步研究有、无预警对2类行车安全事件下THW影响的显著程度,以预警设备的开启状态(无预警/有预警)为因子对THW进行方差分析,见表5。结果表明,预警系统的有无对减速跟驰(F=3.983,p<0.05)和超车换道(F=3.882,p<0.05)这2类车辆交互行为行车安全事件下的THW均有显著性影响,说明预警系统在微观车辆运行风险层面能够起到积极干预效果。
杰克坐在床上,捧着笔记本看着。苏婷婷趴过来,问:怎么样,谁的支持率高?杰克自信地:肯定我的高!咱爸观点早过时了!苏婷婷说:你就这么自信?杰克回答:当然自信,要不敢承诺听观众的?苏婷婷担忧地:我觉得你不该做这个承诺。杰克说:你放心,绝对没问题!结果出来了!杰克打开网站页面,突然愣住了:不会吧?咱爸怎么会比我高?苏婷婷失望地:我说么,你就不该做出承诺。杰克又刷新了一遍网页,喃喃地:怎么会呢?怎么会呢?苏婷婷提醒他:杰克,你忘了,这不是华盛顿,是在中国!杰克瞪大眼睛:中国不是早就和世界接轨了吗?苏婷婷说:有些接了,有些还没接。
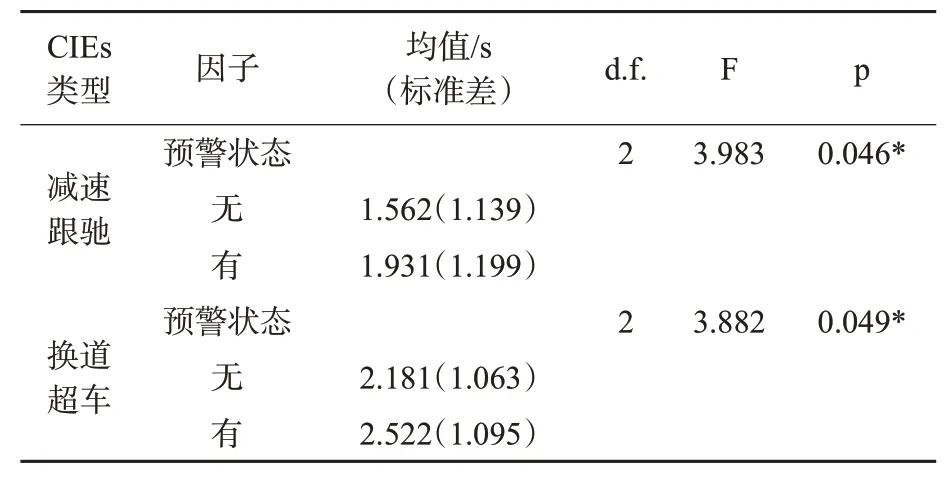
表5 预警状态对2类行车安全事件THW影响分析Tab.5 Analysis results of the influence of FCWworking state on THWof the two typical CIEs
3.2 道路交通运行风险干预效果分析
通过对比分析有-无预警情形下试验过程中减速跟驰、超车换道这2类CIEs发生频数变化,以及试验路段车辆运行速度分布特征,可从对道路交通总体运行状态的纬度,分析评估预警系统对行车风险的干预效果。
从表4可知,无预警情况下CIEs频数为601次,有预警情况下CIEs频数为488次,预警系统启动后,总的CIEs下降了18.8%,其中跟驰CIEs下降了16.0%,超车换道CIEs下降了23.7%,试验路段总体行车安全事件在预警系统的干预下明显减少。
速度离散性与交通安全有密切关系,速度离散性越高,事故率越高。因此,将试验路段按照500 m长度取1个速度检测断面,利用采集的车辆运行速度数据,统计分析各检测断面运行速度分布情况和断面运行速度标准差,用以评估预警系统对道路运行风险的干预效果。由于试验时路段背景交通量较小,社会车辆对试验车辆群组的干扰程度较低,因此可认为分析断面运行速度时,车辆群组的速度分布情况可表征交通流总体运行情况,分析结果见图10。
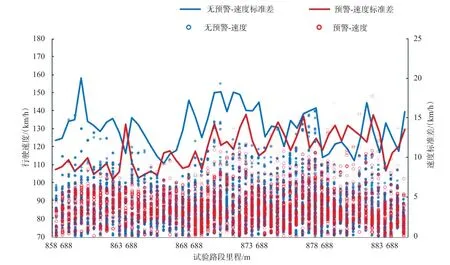
图10 有、无预警情形下试验路段车辆断面运行速度分布图(500 m间隔断面)Fig.10 Comparison of speed distribution in test section of warning and no-warning(500 m interval section)
结果表明,无预警情形下,断面运行速度分布离散性明显大于有预警情形。无预警情形下断面运行速度标准差区间为[9.24,20.02](km/h),有预警情形下断面运行速度标准差区间为[7.25,15.39](km/h),说明预警系统对降低道路交通运行风险有积极作用。
3.3 对驾驶员主观干预效果分析
试验完成后,对试验人员开展问卷调查,以期评估预警的准确性和驾驶员对该系统的认可度。问卷调查采用量表题形式,1~5表示不认可到非常认可,内容包括:与驾驶员对风险感知的一致性,与车辆自带ADAS预警的一致性,是否愿意遵从预警信息调整行为,预警信息对驾驶行为的改善作用,该系统推广应用对道路交通安全提升的预期,是否愿意长期使用该车载终端6个方面。
15名试验人员均参与问卷调查,采用SPSS软件对问卷结果进行信度和效度分析,得到Cronbachα系数为0.857(>0.8),KMO取样适切性量数为0.746(>0.7),说明调研问卷信度和效度较高。
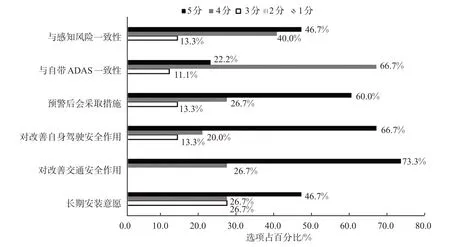
图11 问卷调查统计结果Fig.11 Statistical results of questionnaire survey
4 结束语
1)本文通过车辆群组实车试验,在高速公路真实道路环境中模拟了车辆跟驰、超车状态下的典型风险场景,利用车载预警系统采集的车辆高精度定位信息及其与道路的映射关系,通过对行车安全事件的提取,从车辆交互运行特征、道路运行风险特征、驾驶员对系统认可度3个维度,提出了1种车辆碰撞预警系统对行车风险干预效果的试验及综合评估方法。
2)有预警情形下,减速跟驰、超车换道这2类车辆交互避险行为产生的行车安全事件THW均值分别增加了0.37 s和0.34 s,且预警系统开闭状态对2类THW均有显著性影响,问卷调查显示86.7%的试验人员在接收到预警信息后会采取趋于安全的措施。
3)有预警情形下,2类行车安全事件频数分别下降了16.0%和23.7%,断面车辆运行速度标准差分布区间从[9.24,20.02]下降至[7.25,15.39],速度分布离散性带来的道路总体运行风险明显下降,问卷调查显示73.3%的试验人员非常认同预警系统在道路交通安全提升方面的积极作用。
研究采用具有车路协同定位及预警功能的车载终端进行车辆群组试验及分析,可在一定程度上模拟智能网联环境下车辆交互行为及风险特征。下一步将丰富试验场景和车型,并结合仿真手段,完善典型风险条件下智能网联车辆驾驶行为特征分析,构建多层次预警效果评估指标体系。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21 09:15:50
河南科学(2020年3期)2020-06-02 08:30:14
电子制作(2019年11期)2019-07-04 00:34:36
电子测试(2018年14期)2018-09-26 06:04:10
中国交通信息化(2017年12期)2017-06-06 07:23:53
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:42
华南农业大学学报(社会科学版)(2015年1期)2016-01-11 11:46:04
南风窗(2014年16期)2014-05-30 08:13:46
计算机与网络(2014年1期)2014-03-25 10:56:59
中国质量与标准导报(2013年8期)2013-03-11 19:54:06
