
机载激光雷达测量技术在山区公路项目中的应用
2022-03-20 12:22龙龙
北方交通 2022年3期
龙 龙
(辽宁省交通规划设计院有限责任公司 沈阳市 110166)
机载激光雷达(LiDAR)是集激光扫描、全球定位系统和惯性导航系统三种技术于一体的空间测量技术。它能够快速准确地直接获取地表各类地物三维地理信息,快速制作大比例尺数字高程模型、三维地形模型等成果,与传统测绘手段相比,具有作业成本低、产品制作周期短、产品类型丰富和三维建模快速准确等优点,解决了其它测绘手段长期不能解决的难题,被测绘界认为是继全球定位系统之后的重大技术革命。
本溪至集安高速公路项目位于辽宁省东部山区,路线里程长度221.688km,项目区山高、林密,地面高程由109m渐变至860m,地面起伏较大,林地卫星信号弱。普通测量方式满足不了设计周期和测量精度要求,机载激光雷达测量技术的应用,具有重要的实际意义。
1 测区概况及分区
根据测图要求的比例尺及测区具体情况选择航摄比例尺及航高,划分航摄分区。航摄分区划分时,要遵循以下原则[1]:
(1)按规范的规定和数字航摄仪性能划分航摄分区,同一分区内的景物特征应基本一致。
(2)分区内的地形高差一般不得大于四分之一相对航高(以分区的平均高度平面为基准面的航高)。
(3)分区界线应与图廓线相一致。
(4)分区边界覆盖应满足分区间各自满幅要求。
(5)分区摄影基准面的高度:以分区内具有代表性的高点平均高程和低点平均高程之和的二分之一求得。
(6)航线长度应不大于60km,直线飞行时间不宜大于30min。
2 机载雷达数据预处理方案
机载LIDAR航摄获取的点云数据需要进行姿态校正、噪声点剔除、坐标转换、航带拼接、系统差改正等预处理,生成满足要求的点云成果数据[2]。
2.1 点云姿态校正、航带拼接、系统差改正
完成机载LIDAR航测原始采集及航测原始数据解算、输出后,由于设备误差、观测误差等多方面误差源影响,机载LIDAR航测原始点云数据精度还不太理想,具体表现为航带间、架次间航带点云重叠处还存在大量的平面和高程错位现象。而系统总结分析机载LIDAR航测误差规律和特点、构建虚拟观测方程、建立点云平差优化的系统化工艺,是确保本项目数据成果精度和质量的重要环节。
本项目运用了“单架次、单航带、局部平差分级、分阶段融合”的点云整体平差法,有效解决了众多点云数据质量难题,保障了点云精度和匹配效果。 “单架次、单航带、局部平差分级、分阶段融合”点云整体平差法的具体介绍如下[3]:
2.1.1机载点云误差源分析
影响机载LIDAR测量点云精度的误差来源很多,主要包括:GNSS定位误差(x,y,z)、GNSS/INS组合定姿误差(heading, roll, pitch)和激光测距的比率误差(scale)。这些误差源的表现特点如下:
(1)x、y、z为GNSS定位误差参数,与众多误差源密切相关,在局部范围内具有一定的随机性。
(2)heading、roll、pitch为GNSS轨迹线关于姿态定位的角度误差,与航线飞行状态直接相关,具有同一航线内误差恒定、航线间误差差异较大的特点。
(3)scale为激光测距仪缩放误差,与飞行时段测区的气温和气压等外界观测条件相关,具有架次内误差恒定、架次间误差差异较大的特点。
2.1.2机载点云整体平差方法
根据激光雷达测量原理,机载LIDAR测量点云坐标解算公式如下:
假设P和Q为相邻的激光点云条带,内插后的数字表面模型表达式如下:
则相邻激光点云条带的错位误差公式如下:
d(X,Y,Z)=p(x,y,z)-q(x,y,z)参考以上公式,观测变量d(X、Y、Z)可用变量s、h、r、p、x、y和z对应的函数式表达:

=T(s,h,r,p,x,y,z)
其中:T(s,h,r,p,x,y,z)为P、Q条带上点云数据坐标的数学表达式的简写。
(1)对于scale参数,采用单架次平差法,在同一架次内建立关于scale的虚拟观测方程:
(2)对heading、roll、pitch参数,采用单航线平差法,在航线间重叠区建立关于heading、roll、pitch的虚拟观测方程:
(3)对x,y,z参数,采用局部平差法,以样本区段为基础分割数据建立局部分析区,在局部分析区内建立关于x,y,z的虚拟观测方程:
对于架次间相邻条带的错位问题,采用单航线平差法处理,从而实现大范围测区的无缝拼接和精度优化。
(4)在平差流程上,本方法遵循“先宏观后细部”原则,按照单架次平差、单航线平差和局部平差法的先后顺序采用分级平差思路进行点云的分阶段平差处理。
为保证点云平差达到最优状态,还需要对点云进行平差处理的迭代循环,通过设置一定精度的阈值终止循环,从而保证机载LIDAR测量点云数据精度。最后通过地面控制测量,根据地面控制点修正点云精度,保证点云数据质量满足项目精度要求。
此外,考虑本项目总体实施进度,我们采用分区外扩接边的方法,保证数据接边良好的情况下,分批次提供成果数据。
2.1.3影像数据处理
原始影像通过解压飞行采集影像数据,对影像数据进行对比度、色泽、亮度等各项处理调整,使之色差统一、色调柔和、自然。
2.1.4噪声点剔除
通过设置宏命令剔除点云中存在的噪音点,以设置绝对高程的方法剔除较高与较低的点,生成的点云满足后续生产的使用。
2.1.5坐标转换
(1)平面坐标转换
采用布尔萨转换模型进行测区平面工程坐标系的转换,作业流程如下:
①收集测区同时具有WGS84大地坐标和当地平面坐标的坐标点。
②要求转换点在测区均匀分布,并包围整个测区。
③采用布尔萨7参数模型计算坐标系转换7个转换参数。
(2)高程坐标转换
根据已有工程项目经验采用TIN网方法可实现对大地精化水准模型的高精度模拟,技术要点主要包括以下几个方面:
①TIN三角网的最大边长应控制在7km内。
②要求TIN网能外包对应测区范围。水准面的外推方法,精度不高,必须避免部分测区在TIN网外进行高程变换。
③高程转换点要求同时具有WGS84大地高和1985国家高程基准高,高程转换采用拟合方法,精度控制在5cm以内。
3 测量数据分析
机载激光雷达测量技术首次在辽宁省高速公路建设项目中应用,本项目中桩采用RTK放样,进行了数据校核,全线总计比对12253个中桩,见表1。其中:主线段总计比对8946个中桩,左线段总计比对3307个中桩。
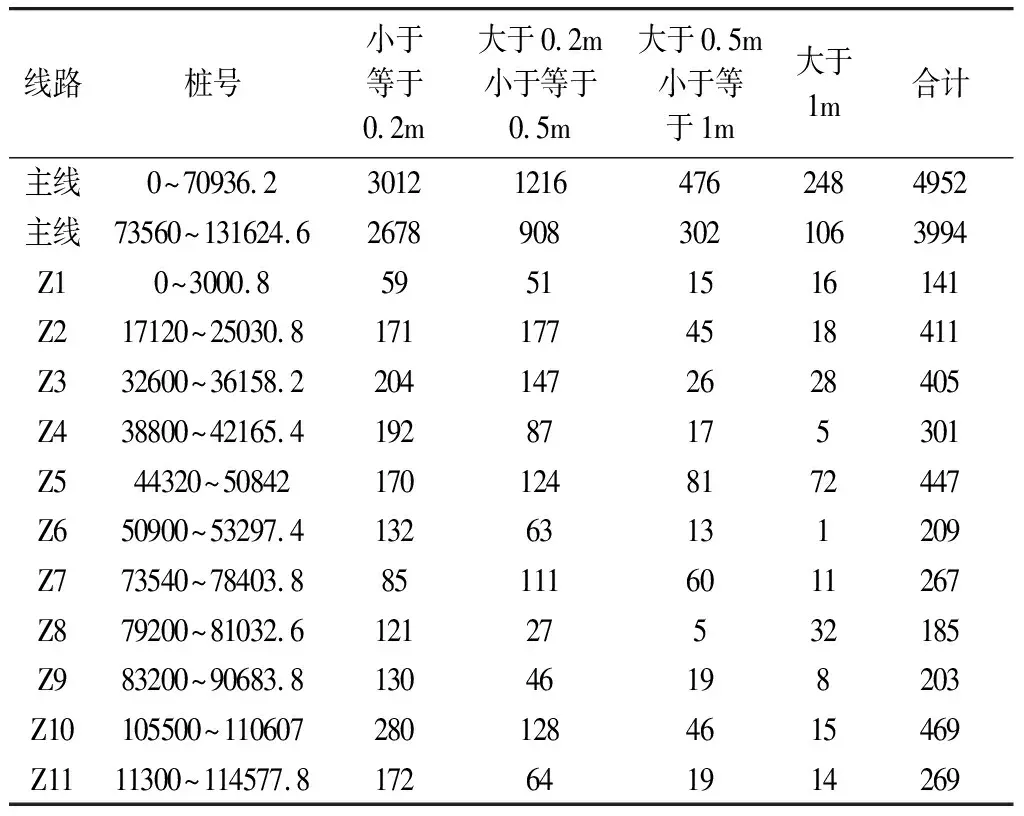
表1 中桩测量数据离散统计表
其中小于等于0.2m的中桩为7406个(占比60.44%),大于0.2m小于等于0.5m的中桩为3149个(占比25.70%),大于0.5m小于等于1m的中桩为1124个(占比9.17%),大于1m的中桩个数为574个(占比4.68%)。
4 结论
(1)全线60.44%中桩高程差小于0.2m,测量精度满足新建项目需要。
(2)1∶2000地形图相邻等高线高程差为2m,2/3等高距为1.3m,本项目机载激光雷达测量数据95.32%满足小于2/3等高距要求。
(3)测量数据精准度要求高的部位需采用实测方式获取测量资料,如铁路、高等级路、枢纽立交及加宽改造工程采用RTK采点,与既有高速公路接线位置前后40m范围及桥梁加宽部位采用水准测量。
中桩及控制性测量采用实测,横断采用机载激光雷达测量数据变化趋势技术,为公路建设项目测量提供了很好的思路。推荐在新建公路工程中广泛应用。
猜你喜欢
绿色科技(2022年16期)2022-09-15
科技创新与品牌(2022年4期)2022-05-08
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
当代陕西(2020年23期)2021-01-07
计算机与网络(2020年19期)2020-12-04
西部资源(2018年1期)2018-11-01
消费导刊(2017年8期)2018-01-18
建筑建材装饰(2017年6期)2017-07-04
