城市交通信号定时控制和感应控制的应用
2022-03-18 09:24于明宝张耀王丽丽
交通科技与管理 2022年4期
于明宝 张耀 王丽丽

摘要 城市交通擁堵程度与人民群众幸福指数密切相关,文章以城市交通信号定时控制和感应控制作为研究对象,介绍了交通信号控制系统硬件结构,分析了各种控制方式的优势与不足。针对定时控制和感应控制应用的问题进行了分析,结果表明,在交通高峰时,经过优化的TOD固定配时控制方案是最有效的控制策略;在交通在低峰时,采用全感应或半感应是最有效的信号控制策略。
关键词 交通信号;拥堵;定时;感应
中图分类号 U491.4文献标识码 A文章编号 2096-8949(2022)04-0001-03
0 引言
随着车辆、城市人口的持续增加,城市的道路变得更加拥挤,需要通过科学的方法实现对交通信号的有效控制。通过协调控制交通信号控制可以减轻突发性交通事件的影响,充分发挥交通控制和管理作用,最大限度方便行人通行、合理分配路权、有效控制互相冲突交通流、有效管理大交通流量的交叉口。
1 智能交通信号机
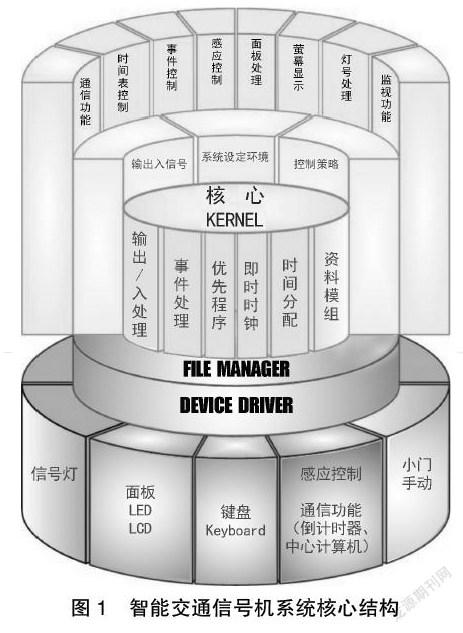
智能交通信号机在交通信号灯、信息展示屏、停车位诱导屏、车辆检测与测速器的控制与管理上应用,可与控制中心平台相连接,实现区域管控和交通优化,是“物联网”智慧城市交通系统的重要组成部分。智能交通信号机系统核心结构如图1。
智能交通信号机的核心功能共分为五个层次:核心层、控制层、文件及设备驱动层、外设层、辅助层。
2 交通信号控制方法
交通信号控制方法可以分为:定时控制、感应控制和自适应控制三种。其系统硬件结构如图2。
定时控制(固定配时控制)主要依据交通历史数据,分别就周内日或特殊假日不同时段的交通需求建立不同的配时方案,虽能兼顾不同时段的交通需求,却易忽略时段内交通需求的变化,常造成绿灯时间的不足或损失[1]。
感应控制是在路口各方向靠近停止线的地方设置车辆检测器,交通信号机接收车辆检测器发送的车流信息,针对路口实际交通状况,对单点路口或干道绿波带做合理交通信号控制,从而实现合理的相位控制、最小的时间损失、节能环保的目标。交通信号机处理所有车辆检测器输入信息,确认红灯时是否有车辆在等待或绿灯延长时间时的交通需求,并大致可分为半感应和全感应两种控制方式。能更有效地利用绿灯时间,达到路口交通效益最大的目标。
自适应控制把交通系统看作一个不确定系统。通过测量车流量、停车次数、延误时间和排队长度等状态量反馈来实现信号配时的动态优化调整。
3 半感应控制
半感应控制是针对次要道路或左转相位执行交通需求的信号管制,只有在确实有交通需求(次要道路或左转相位有车辆申请)时才将通行权开放给次要道路或左转相位,如此可使绿灯时间经常开放给交通量较高的主要道路,但若次要道路考量到行人过街时,则次要道路须维持每周期有最短绿灯时间方便行人通行,唯在感应相位有车辆申请时,绿灯时间是依车辆多寡来延长,其绿灯时间最多延长至所设定的最长绿灯时间值;当感应相位无车辆申请时,若不考量行人时则执行感应相位跳跃,减少绿灯时间的损失。
4 全感应控制
全感应控制比较适合应用于单点控制路口,因为交叉路口上的信号灯的管制配时,是由信号机根据路口各临近路段上的交通需求进行开放绿灯显现时间,也就是各相位时间是由信号机依据各临近路段上的实际交通量以灵活的微调配时,而不需要考量到绿波带续进控制。
感应控制所依据主要的控制参数为信号机所设定的“最小绿灯时间、最长绿灯时间及单位延长时间、延迟时间”;最小绿灯时间在于确保绿灯始亮时,在车辆检测区至停止线的车辆及欲过街道的行人均能安全通过路口。执行感应控制的相位在执行最小绿灯时间结束后,再根据车辆的感应间距,配合单位延长时间,延长绿灯时间至最长绿灯时间结束该相位绿灯灯号,或当红灯相位有车辆申请时,同时感应相位前后车辆间距时间大于单位延长时间亦须结束绿灯灯号。
5 定时控制和感应控制的应用
5.1 行人过街控制
当交通量相当高且相邻两路口间距相当长,行人过街又属必要时,可设置协调式路段行人过街感应控制。其运行方式如下:
(1)平常干道维持绿灯,当有行人感应申请时,干道须经过设定的最短绿灯时间后,执行如下运算及分析再决定是否开放行人绿灯:现行配时方案执行时间若是属干道相位时间,则仍维持干道绿灯,直到干道绿灯时间结束。现行配时方案执行时间若是属行人过街相位时间,则分析其剩余时间;若大于行人过街相位最短绿灯时间,则结束干道相位绿灯,开放行人过街相位绿灯。现行配时方案执行时间若是属行人过街相位时间,则分析其剩余时间;若小于行人过街相位最短绿灯时间,则仍维持干道绿灯,等下一周期才开放行人过街相位绿灯。
(2)干道有最短绿灯时间保护,必须等到最短绿灯时间结束,才能运算分析是否开放行人过街相位绿灯。
(3)行人通行最长绿灯时间是依行人步速(1.2 m/s),路宽,行人激活误差等因素推算。
行人过街相位绿灯时间=最后通过的行人起步延误时间(≥5 s)+(路宽÷行人过1.2 m/s)-黄灯时间
(4)为与前后相邻路口协调控制,其配时周期与前后相邻路口的一致。
5.2 公交优先感应控制
公交优先感应控制采用主动式控制方式,借助检测器及通信技巧,如果有公交被检测到时,对具有通行权限的车辆,保持其行进方向的绿灯状态;如果该方向绿灯即将结束,控制系统通过检测器采集的信息,判断该路口是否还有公交车辆通过。对在红灯相位到达的公交,系统能在现行绿灯相位经过最短绿灯时间后,立即将现有红灯切换,提前开启公交优先绿灯以保障公交通行。
要达到快速公交系统准点控制须解决的是路口信号的延误与停靠站区服务时间的延误,影响快速公交系统旅行时间的主要因素为行驶速度、停站延误与信号延误。行驶速度的差异主要是快速公交系统驾驶的驾车习惯与反应时间,由于其变异难以估算,一般将其忽略不计;在停站延误部分,影响停站延误的因素相当多,而在快速公交系统特性的营运之下,会使停站服务时间产生较大的变异无非就是上下车乘客数量的多少,使得快速公交到站的时间无法精确掌握,造成管理上相当不便。
车辆检测系统是交通控制中采集车流信息的主要工具,由于公交运行路权形态具备公交专用道及混合运行形态,若采用一般车辆感应检测器仅能适用于具有公交专用道的路口,但若需同时解决混合车流情况下,检测器须采用较先进的设备(如:车载机),才能正确检测公交到达及一般车辆的信息。
5.3 环岛路口信号控制
5.3.1 环岛信号控制问题
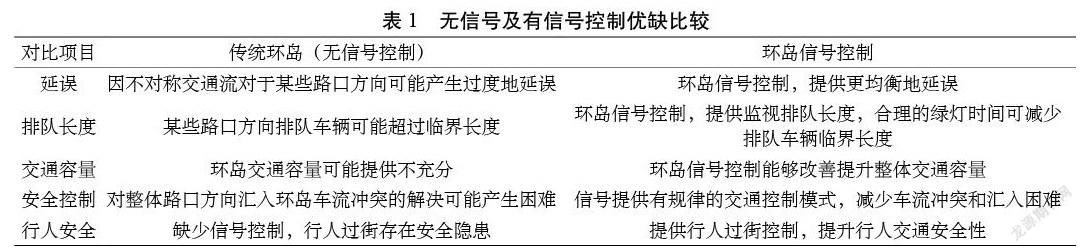
环岛路口原是避免使用信号控制的一种有效的路口交通控制方式,但随着环岛路口交通量的增長,并且超过某一临界值时,尤其在交通拥堵时段常因环内来自不同的入口车流比率,造成直行与左转车辆冲突而形成严重的交通拥堵,致使行人及自行车在安全上产生问题;环岛路口装置信号控制,在交通管理上主要功能在于解决环内因车流转向产生冲突干扰所引起的交通拥堵,进而提升交通容量及行人、自行车交通安全。无信号及有信号控制优缺比较见表1。
5.3.2 环岛交通改善方法
四岔道环岛信号控制:为解决环内车流交织区及冲突点,通常在环内画上左转专用停止线及装置信号灯,左转车辆在停止线等候绿灯,避免与直行车辆冲突,信号相位控制采用两相位环内迟闭控制方式用以清除环内排队车辆;迟闭时间是由交通流量及可存放的排队车辆数来决定。如果两对向车流不对称或五岔道以上时,亦可采多相位环内迟闭控制方式,若是有些岔道车流不多,该车道可改为单行道[2]。
环岛路口通常位于重要干道交会处,所以在交通控制中心协调控制下:可采用临界路口控制策略疏解其饱和流量,避免环岛某一临近路段的拥堵而造成群组或整个路网的交通瘫痪。在临界路口控制模式下,环岛信号控制脱离干道协调控制,采用独立路口运作,用于增加临界路段的疏解流量减少拥堵程度。通常交控中心依据车辆采集的交通数据来分析、判断路口的拥堵状况、各流向的交通需求量,再由交控中心下传新的配时方案控制环岛信号。
6 结论
交通设计和信号控制是疏解交通问题及改善交通现状有效的技术措施。在交通高峰时期,经过优化的TOD固定配时控制方案是最有效的控制策略。TOD方案是根据控制中心对近期交通流量的趋势经优化产生并下载到信号机执行的运行方案。在交通低峰时采用全感应或半感应是最有效的信号控制策略。感应控制适用于非重现性交通拥挤,交通量高低相差比较悬殊而变化无定的交叉路口。城市交通信号控制系统与先进公交系统、先进车辆控制系统等相互之间的结合则是更深入的课题。
参考文献
[1]刘智勇. 智能交通控制理论及其应用[M]. 北京:科学出版社,2003.
[2]陈学文. 城市快速路匝道优化控制策略与方法研究[D].长春:吉林大学, 2008.