基于TRIZ 理论的新型地下排水管道清污机器人设计
2022-03-17 00:48李民生王志伟洪学武刘海强
天津城建大学学报 2022年1期
宁 凡,李民生,田 峰,王志伟,洪学武,刘海强,赵 坚
(天津城建大学 控制与机械工程学院,天津 300384)
随着我国城镇化的发展,地下排水管道在生活中起着至关重要的作用,是保障城市运行的重要基础设施和“生命线”.管道由于长时间的超负荷使用不可避免的会发生堵塞现象,可导致大量污水排出形成路面积水甚至造成城市内涝,严重影响人民的生活.
目前,国内的管道清污方法主要有高压水清淤法、绞车清淤法以及人工清污等.高压水清淤法的工作原理是利用高压水流或者气体冲开被堵塞的管道,被广泛应用到市政管道疏通工作中.但是该方法会对管道造成一定的损伤,尤其是在管道连接处,强大的冲击力很可能会冲破连接处,造成液体或者气体泄漏,使上游管道产生新的淤积.绞车清淤法首先需将竹片穿过管道,然后利用管道两端井上的绞车往复绞动钢丝绳,使淤积物被清通.该方法竹片的放置需人工下井完成,恶劣的工作环境给工作带来了极大的不便,还容易引发安全事故.对于小口径管道堵塞的疏通,施工人员无法进入管道中进行清污,仍需开挖路面,非常消耗人力和财力,影响社会的生产生活.此外,我国城市排水管道的数量以及规模越来越大,分布状况也越来越复杂,因此,亟需研制一款可用于地下管道非开挖清淤排污的机器人.
为了提高管道清污机器人的创新设计水平,加快发明创造的速度,利用TRIZ 理论对机器人的结构进行创新设计.近年来,基于TRIZ 的创新方法在轻工装备领域中得到了广泛的应用[1]. 李金凤等[2]为了实现豌豆收获机械化配套作业,基于TRIZ 理论中的“物-场模型”和“冲突解决原理”分析方法,设计了一款豌豆割晒机械装备;高志鹏等[3]提出运用TRIZ 理论对堆垛装置的结构进行创新设计;万一品[4]详细分析了TRIZ 理论创新设计方法,并根据市场需求,将TRIZ理论中的矛盾矩阵与模块化设计相结合设计了一款道路综合养护车. 曹卫彬等[5]为解决红花丝采摘在机械化领域的不足,根据人工手采的方式及过程,针对红花花球分布层次不齐造成的不能使用机械采摘、采摘效率低等问题,建立了红花丝采摘的物质-场模型,从而确定采摘的最佳方案,设计了一款专用于红花丝的盲采装置. 曾宇露等[6]根据目前老年人对如厕助力产品的市场需求,通过对如厕过程进行分析,从安全性和稳定性出发,利用TRIZ 设计了一款相对来说更加安全的、适用于老年人的如厕助力产品.
为实现地下水管道非开挖的清淤排污,本文通过对管道清污机器人的设计需求进行分析,利用TRIZ理论中的分离原理将机器人的创新设计划分为各功能部件的设计;同时借助发明原理求解各部件设计过中遇到的技术矛盾,成功研制了一款适用于管径为500~800 mm 的管道清污机器人.
1 基于TRIZ 理论分离原理的管道清污机器人整体结构创新设计
TRIZ 理论成功地揭示了各技术创新在发展过程中所遵循的内在规律和原理,可以帮助工程师快速地解决清污机器人创新设计过程中存在的矛盾[7].基于TRIZ理论的矛盾问题解决路线如图1 所示.
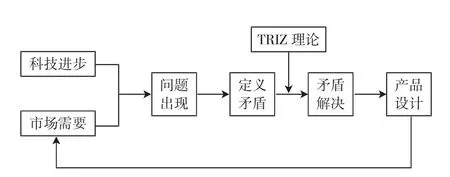
图1 矛盾问题解决路线
由于清污机器人是对两井口之间堵塞的管道进行疏通清理,要求机器人可以在地下管道中带水作业.此外,当机器人将管道中造成堵塞的淤泥、污物打散之后,还需将打散的污物排除,避免产生新的淤积堵塞.本文所研制的管道清污机器人除了要满足上述工作要求的同时,还要求整个机器人系统结构简单,便于制造.
上述的设计问题可进一步转化为TIRZ 理论的冲突问题[8].管道清污机器人所要满足的功能越多,其结构也会更加复杂,这与机器人结构简单、便于制造的设计要求相冲突.因此,采用TRIZ 的冲突理论分析,得出这对冲突为物理冲突,可直接采用分离原理来解决.分离原理包括空间分离、时间分离、条件分离、整体与部分分离4 类原理[9],如表1 所示.
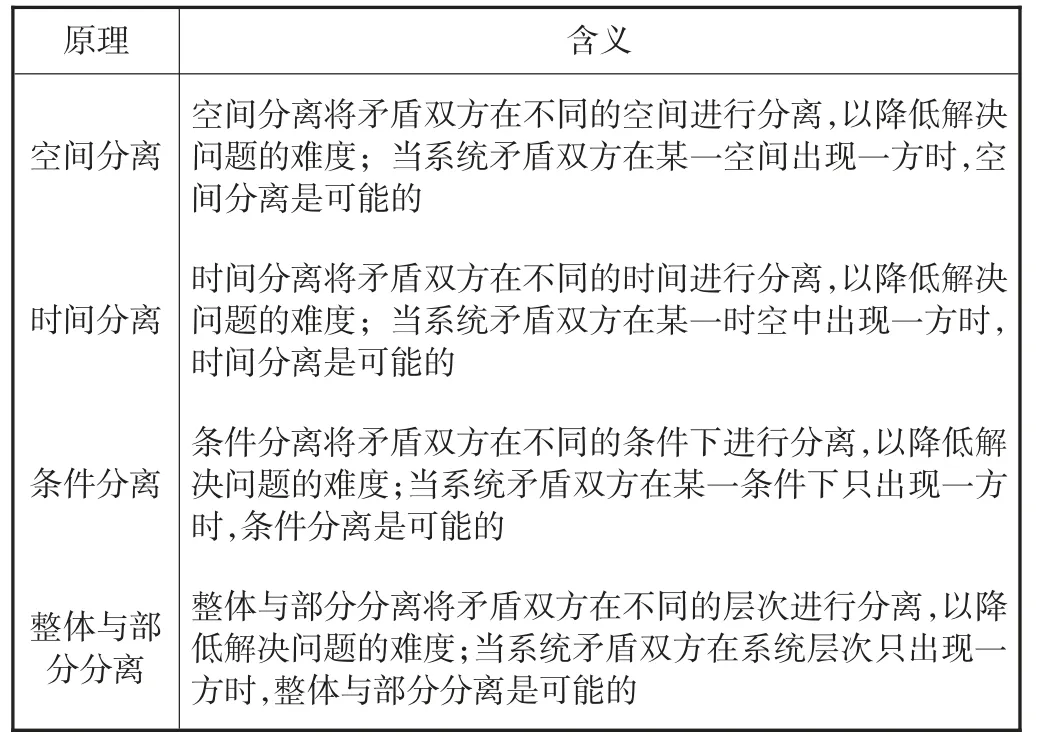
表1 分离原理
针对管道清污机器人的冲突矛盾,可以采用整体与部分分离的分离原理将机器人要完成的工作划分成可以一个个独立的工作内容,从而降低创新设计的难度[10].
为实现管道清污机器人清淤排污于一体的总功能A,可利用整体与部分分离原理将机器人的总功能进行分割,变成独立的几个部件来实现,如图2 所示.首先,为了满足机器人可以疏通两井口之间的50 m管道,要求其在管道中可以自行前进从而确定机器人的一个子功能部件为行走部件A2.对于附着在管道内壁上的污物,可以利用旋转的刀具对其进行切削,因此机器人的另一个子功能部件为切削部件A1.为避免切削后的污物再一次造成堵塞,划分出排污部件A3对污物进行稀释排出.此外,机器人的工作环境不同于其他设备,需要带水作业,因此对整个机器人进行防水部件A4的设计也是必不可少的.利用机械结构和相关的造型知识设计出能够实现各功能的部件,最终得到一套可以满足需求且可行的解决方案.
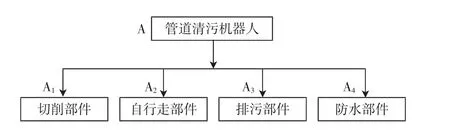
图2 管道清污机器人整体与部分分离原理
2 基于TRIZ 理论发明原理的管道清污机器人关键部件结构创新设计
在清污机器人各功能部件的设计过程中,可能会出现多个因素相互促进、相互制约的情况,即技术细节之间的矛盾冲突[11].因此,本文利用TRIZ 的40 条发明原理来化解各部件中可能出现的技术冲突,辅助完成各功能部件的创新设计.
2.1 切削部件创新设计
对于管道清污机器人的切削部件而言,在切削过程中切削刀具可能会遇到水泥块、树枝等质地较硬的物质,且要求刀具可以适用于不同管径的管道,因此需要增强切削部件的适应性与多用性.但是,这将会增加切削机构的复杂性,使整个部件可制造性、刀具力度变差.为解决这一问题,基于TRIZ 理论将切削部件的适应性与多用性作为改善参数,刀具的力度、可制造性以及复杂性作为恶化参数,建立切削部件的矛盾冲突矩阵,查找出解决问题所对应的发明原理,如表2 所示.
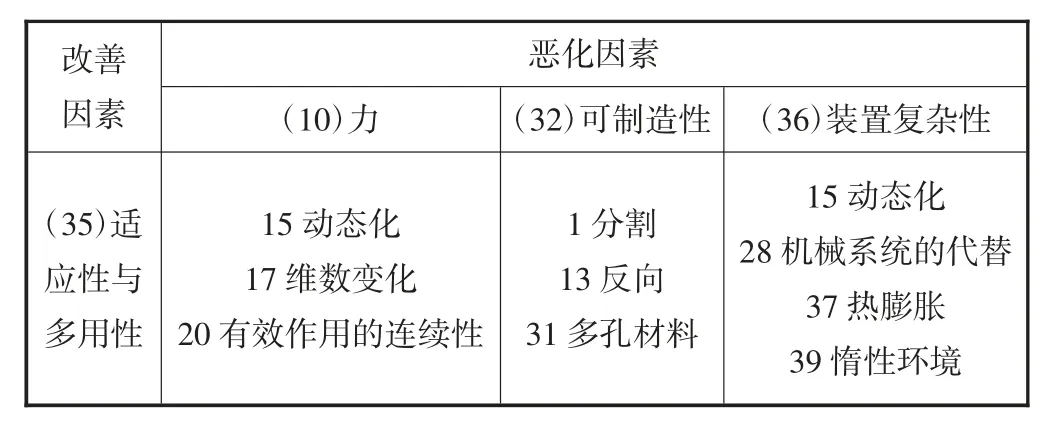
表2 切削部件的矛盾冲突矩阵
根据上表,可以提取出解决切削部件矛盾问题的发明原理组成的解决方案共有36 种.根据切削部件的实际工作情况,选择了一种最为有效的解决方案.对于切削部件的旋转刀具,可以利用原理1(分割原理)将刀具的刀片分成3 个独立的叶片,方便叶片的制造与替换;为实现刀具适用于不同管径的管道清污,利用发明原理15(动态化原理)将刀具的3 个刀片与转轴通过曲柄滑块机构进行连接,从而实现刀具的变径;根据发明原理17(维数变化原则),为满足刀具在切削过程中切削力的变化,可以通过改变刀片的切削角度来实现.因此,本文所设计的切削部件结构如图3所示.
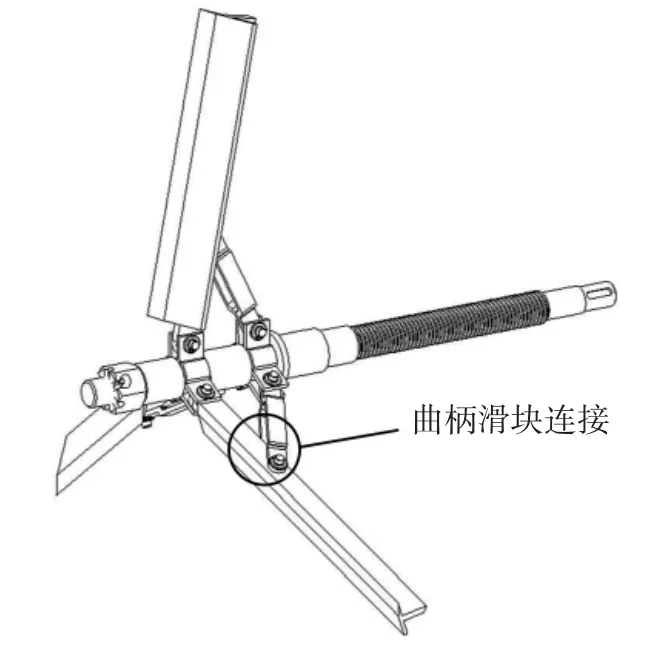
图3 切削部件结构
2.2 自行走部件创新设计
目前,我国所用的地下排水管道为圆筒状,管道清污机器人在圆筒形的管道中如何可靠稳定地前进仍是一个难点,因此在对行走部件进行创新设计时,提高行走的可靠性是重中之重.为实现清污机器人在500~800 mm 管径的管道中行走,本文所设计的机器人利用电动推杆来满足不同管径的支撑要求.但是,这增加了部件自动化的控制难度,也为机器人的可操作性增加了一定的困难. 根据自行走部件的技术矛盾,将该部件行走的可靠性作为改善参数,装置自动化程度、可操作性作为恶化参数,得到部件的矛盾冲突矩阵如表3 所示.
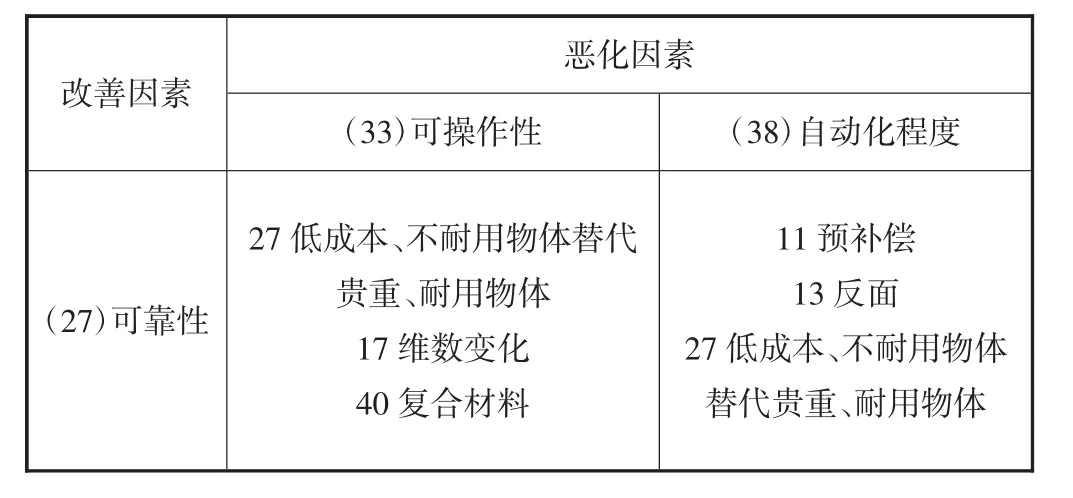
表3 自行走部件的矛盾冲突矩阵
对表3 中的发明原理进行分析筛选,提取出有价值的发明原理有:原理11(预补偿原理)、原理27(低成本、不耐用物体替代贵重、耐用物体原理).在自行走部件中,采用传动轴与电动推杆相配合的方式来实现机器人整体的前进;为方便机器人的前进,在支撑件电动推杆的末端安装滚轮.但是,由于电动推杆与管道内壁之间的压力,滚轮容易发生损坏破裂,若滚轮的硬度较大,则会造成电动推杆的损坏.因此,根据原理27,选择硬度较小的柔性滚轮可以减少机器人的损坏失效,提高运行的可靠性.此外,为避免中间安装在螺母套上的一组电动推杆与其余两组推杆发生碰撞,利用原理11 在电动推杆处安装限位开关,用于控制电机的转动方向.
管道清污机器人中自行走部件的结构如图4 所示.自行走部件主要由伺服电机、主传动轴、螺母套、支撑套、电动推杆等零部件组成.其中,电动推杆通过螺母套及支撑套与转轴连接组成一个稳定的三角形,且各推杆之间相互独立易组装拆卸、便于替换调整.机器人自行走部件的工作原理如下:首先,位于中间螺母套上的三个电动推杆伸出顶住排水管道内壁,此时电机正转,转轴与螺母套开始相对运动,管道清污机器人相对于排水管道而言向前移动;当触碰到限位开关时,中间一组推杆收回,其余两组电动推杆伸出顶住排水管道内壁,此时电机反转,管道清污机器人相对于排水管道而言静止不动,而中间一组的电动推杆向前移动至转轴前端的限位开关;最后,中间一组的推杆伸出,另两组的推杆收回,电机正转,机器人开始下一轮的前进运动.
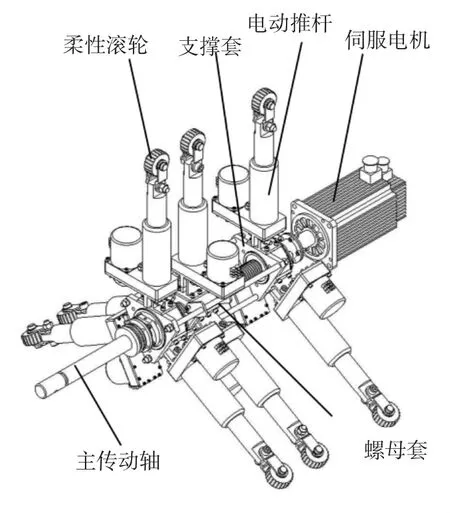
图4 自行走部件结构
2.3 排污以及防水部件的创新设计
为实现管道清污机器人的带水作业,整个机器人需要做密封防水设计.但是,由于机器人自行走部件的存在,需要防水的壳体随着电动推杆的移动而移动.因此,基于发明原理35(参数变化原理),将机器人防水的壳体使用波纹管代替,以满足防水部件的密封性以及可移动性.管道清污机器人的的防水部件如图5所示.
图5 防水部件结构
为避免机器人打散的污物形成新的淤积堵塞,需要将污物排除管道.因此,根据发明原理10(预操作原理),在排污管的附近设计增加两根给水管,用于稀释切削部件切削的污物,从而使污物更容易被排除.管道清污机器人的的排污部件如图6 所示,主要包括给水管、过滤网和排污管以及与后桶下方链接的固定板,其中,过滤网放置于排污管中.
图6 排污部件结构
将利用发明原理创新设计的部件进行整合,完成了管道清污机器人的整机结构设计,如图7a 所示.并且制作了管道清污机器人的样机,如图7b 所示.
图7 管道清污机器人
选取天津市地下管网两个井口之间的管道,下放机器人样机进行试验.试验结果表明:管道清污机器人因其刀具与自行走部件可调,可以在管径为500~800 mm 的管道中进行清淤排污;对于管道中堵塞污物,如骨头、树枝、水泥块等,机器人的切削部件可以将其切割成小块,并利用排污管将污物排除管道;自行走部件完成蠕动前进动作,其行走速度为0.25 m/min,一次清污的最短距离为30 m.为扩大机器人的应用领域,机器人切削部件的刀具可以拆卸,若装载其他机构可以将机器人制作成管道检测机器人、管道穿缆机器人等.
3 结论
为提高管道清污机器人的创新设计水平,加快发明创造的速度,本文利用TRIZ 理论成功研制了一款适用于小口径管道、集清淤与排污为一体的管道清污机器人.
(1)通过对管道清污机器人的设计需求进行研究,利用TRIZ 理论的分离原理解决机器人整体设计过程中的物理冲突,将机器人整体的创新设计划分为各功能部件的创新设计,降低了设计难度.
(2)基于TRIZ 理论的发明原理,对机器人各功能部件中遇到的技术冲突进行分析求解,并选择最优解完成了清污机器人切削部件、行走部件、防水部件以及排污部件的创新设计.
(3)通过对样机进行试验,本文所设计的管道清污机器人能实现管径为500~800 mm 的小口径管道非开挖清污,相对人工清淤,更加高效安全,避免人力物力的浪费,为相关产品的创新设计与功能完善提供了新的参考.
猜你喜欢
珠江水运(2022年7期)2022-05-12
小学阅读指南·低年级版(2022年5期)2022-05-09
电焊机(2022年4期)2022-05-06
建材发展导向(2022年6期)2022-04-18
汽车电器(2022年2期)2022-03-01
建材发展导向(2021年19期)2021-12-06
科学Fans(2020年10期)2020-12-24
发明与创新·小学生(2020年5期)2020-08-14
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14