
拖拉机自动导航技术的研究
2022-03-17 01:43成仲年
农机使用与维修 2022年3期
成仲年
(会宁县翟家所镇人民政府,甘肃 会宁 730715)
0 引言
农业拖拉机是进行各项农事操作的重要农用机械,与各项农业机具配合使用完成作物播种、耕地及收获,是农业生产中的重要动力机械。自动导航系统可以将驾驶者从枯燥重复的驾驶过程中解放出来,通过替代人力进入田间进行农业操作,改善了农业工作人员的工作环境,推进农业现代化进程[1]。国内外在20世纪80年代开始逐渐将拖拉机自动导航技术应用到农业生产中,目前,在德国、美国和日本都已经基本实现在田间的投放使用。田间试验结果表明,使用拖拉机自动导航系统可以极大地降低劳动强度,提高农业生产效率,工作人员只需要在远程对农业机械进行实时监控,当发生机械偏离规定路径时及时进行远程调整,因此,大力发展拖拉机自动导航技术是实现农业现代化进程的重要作业环节。
该研究基于自动导航系统的关键技术,对目前国内外拖拉机自动导航系统的发展现状进行分析,指出目前拖拉机自动导航系统在田间运行过程中存在的瓶颈,提出未来发展农业拖拉机自动导航系统的重点与难点,研究结果对于完善我国农业拖拉机自动驾驶系统的发展提供参考,对推动我国农业生产向自动化、智能化及现代化发展具有重要意义。
1 拖拉机自动导航驾驶技术
目前,拖拉机自动导航系统主要分为液压式和电控式。液压式拖拉机自动导航系统主要包括ECU控制器、GPS定位系统、各类传感器、液压阀及车载计算机等。电控式拖拉机自动导航系统主要包括导航系统、GPS定位系统、电动转向系统、各类传感器及车载计算机系统等。与液压控制相比,电控技术更加高效、经济,田间行驶稳定性及可靠性较高[2],可以根据传感器信号自动控制车辆油门大小,从而自动控制驾驶速度,而且电控系统机械配合紧凑、轻便,可以适应各种田间地形环境,是目前在农用驾驶机械及车辆驾驶中应用最为广泛的驾驶系统。
2 自动导航拖拉机中的关键技术
2.1 定位技术
定位技术是自动导航系统中的重要组成部分,定位精度是决定安全驾驶的重要前提,尤其是在交通行驶过程中,对车辆实现高精度定位可以在遇到路障、行人时驾驶车辆顺利避让,保证车辆安全驾驶。目前,最常用的定位技术主要包括导航定位技术(GPS)、惯性导航技术(Inertial Navigation Technology,INT)及地图配合技术(Map Matching Technology,MMT),其中,以GPS技术和INT技术应用最为广泛[3]。GPS技术主要是依靠在车辆安装定位系统,通过卫星定位为工作人员提供车辆行驶过程中高效实时的车辆移动位置,工作人员可以在远程实时观察拖拉机是否按照规划路线行驶,如果出现位置偏移,及时对车辆进行调整,防止拖拉机在行驶过程中由于运行失误而造成不必要的损失。虽然GPS技术在目前应用中最为便捷广泛,但是GPS导航系统抗干扰性能差,在田间环境恶劣时会出现较大的导航误差。
惯性导航技术(Inertial Navigation Technology,INT)是根据车辆运行过程中的运行速度及运行方向,根据智能反馈系统计算出车辆不同时刻所在的位置信息,由于主要是依靠车辆运行的速度与方向进行位置推算,因此不易受到外界环境的干扰。目前,将INT技术与GPS技术结合使用可以获得更高的定位精度。
2.2 机器视觉系统
我国关于机器视觉技术开始于20世纪90年代,由于相关技术不够成熟,所以在各个行业的实际应用中相对较为落后,仍处于试验阶段,目前主要集中在电子、半导体、汽车行业及交通中应用较为广泛,在农业生产中应用属于初级阶段。
机器视觉技术是目前自动导航技术的核心,主要是通过图像传感器对周边环境进行识别,并将图像信号转换为数字信号(图1),从而做出智能决策,属于人工智能发展的一个重要节点,在农业生产中已经得到了广泛应用。目前,农业生产中病虫害识别、作物生长中的各种农艺性状的自动判别,通过图像采集后进行系统自动判别,根据图像采集的颜色、亮度等转化为数字信号,便于在不进行田间观察时对田间作物进行及时判别,并快速做出干预。目前,在农业机械应用中,机器视觉在田间行驶时,通过对周边环境,如作物生长、土壤性质及判别果实是否成熟,从而完成一系列农事操作,如田间除草、果实采摘及土壤翻耕等。机器视觉技术可以代替传统数据采集信息技术,在较短时间内获取大量数据并及时进行处理,反馈实时有效信息,从而可以完成对目标产量的远程监控与实时监测,因此,大力发展和完善视觉技术是未来自动导航技术乃至整个农业机械的重点。
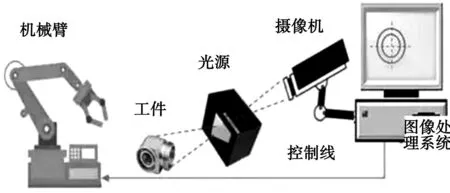
图1 机器视觉技术工作原理
3 拖拉机自动导航技术的优势
3.1 降低劳动强度
拖拉机自动导航技术替代农机驾驶员进行田间驾驶过程中枯燥、单一的工作,而且农业环境较差,该技术极大地缓解了农业操作人员的劳动强度,驾驶员不需要在驾驶室时刻关注田间工作环境,如行走轨迹及行走过程中周边环境信息。利用自动导航技术,驾驶员只需要按照地块合理规划拖拉机行驶路径,而不需要进入田间,在远程进行操控即可,观察拖拉机行驶过程中是否出现偏差,当出现路径偏移时及时进行远程操控即可。
3.2 提高工作效率
传统农业生产往往需要大量人力、物力投入,也容易受到天气影响,遇到阴天、降雨或者高温天气都无法进行田间作业。将自动导航技术投入农业拖拉机行驶过程中,可以在任何气候环境下进入田间工作,配合其他农机具的使用,完成农业生产机械化及智能化进程。在传统农业生产中,人力在田间工作时,无法对周边环境及时获取,容易造成工作失误或者误差,影响农作物生长及后期产量。采用自动导航技术,可以适应任何地理环境及复杂地形,自动感知周边环境信息并及时做出决策,在减轻人力投入的同时提高工作效率。
3.3 精准作业
自动导航技术可以在行驶过程中对周边农作物位置进行精准定位,配合农业播种、喷药、翻耕及收获作业可以进行精准定位,田间信息还可以通过反馈系统及时传送至远程屏幕,工作人员可以进行精准操作,如自动导航技术配合无人机技术,可以提高药物喷洒的均匀度,有效消除病虫害,较传统人工喷洒药物更加高效,利用机器喷洒药物还可以减少农药对农业操作人员健康造成的伤害。
4 自动导航拖拉机存在的问题及发展趋势
目前,国内外都开始对拖拉机自动导航技术进行大量研究,并取得一定的研究成果,国外农业发展较快的国家,如德国、美国及日本已经将拖拉机自动导航技术应用于农业生产中,均带来了一系列农业生产成效,可以代替农业人员在恶劣的田间环境进行农业操作、减少农业生产中的人力物力投入,降低劳动强度,极大地改善了农业生产环境与工作效率。但是目前自动导航技术在农业机械应用中主要受到电子技术、传感器技术发展的限制,目前仍存在一些问题亟待解决。
4.1 存在的问题
4.1.1 导航精度差
由于目前自动导航技术中定位技术、传感器技术、人工智能控制系统及机器视觉技术等还不成熟,我国各个地区地形差别较大,在不同地区进行田间操作时,容易受到地形及田间环境的影响,尤其是在南方丘陵地区,地势不平坦,田间环境较差,会造成拖拉机自动导航技术在工作时稳定性差、定位精度不高等问题。因此,在提高导航精度的同时应该加强农业田间的标准化建设,为自动导航技术在田间应用提供一个良好的环境条件。
4.1.2 农业机械化及自动化水平低
我国是农业大国,但不是农业强国,正是由于我国农业生产机械化水平较低,自动化和规模化程度低,在农业生产中主要受到农业机械的硬件系统、软件系统的限制。由于我国耕地分布较为分散,农业机械使用的推广率较低,农业机械不配套,机械老化程度严重都影响了农业机械化、自动化程度的提高。
4.1.3 农业生产智能化程度低
我国目前已经基本实现将农民从繁重的农业操作中解放出来,但是智能农业装备仍处于中级阶段。与国外农业发达国家相比,在农业机械研发水平、农业生产效率、农业机械创新性及智能农机装备均较为落后[4]。农业装备智能化程度高低会影响人工智能技术在农业生产中的应用,提高农业装备的智能化程度可以更好地与人工智能技术互相融合,在农业生产中发挥“1+1>2”的功能,更好地进入数字农业生产阶段。
4.2 发展趋势
4.2.1 发展配套设备,建立配套支撑体系
农业拖拉机自动导航技术是多种技术的交互融入及各个学科的深度融合,主要是传感器技术、农机制造技术、人工智能技术3大部分。传感器技术是拖拉机自动导航技术的核心技术,是连接农业机械与人工智能技术的“桥梁”,只有提高传感器的精度,才可以更好地将采集的信息及时高效地反馈给信息处理系统;农业制造技术是决定农业机械完成农事操作好坏的评判指标;人工智能技术是及时作出信息判定及决策的中心[5]。目前,我国主要是引进国外相对较为成熟的各类传感器,缺乏自主研发能力,但国外与国内的核心技术差别较大,配合使用效果较差。因此,应该逐步建立拖拉机自动导航系统的配套使用体系,积极探索较为成熟的配套使用系统,探索适应于不同地区、拖拉机型号的生产模式,为农业拖拉机自动导航系统的发展提供一个健全的技术体系。
4.2.2 多种农业机械协同导航技术
农用拖拉机进行农业操作时主要与播种机、翻耕机械及联合收获机械配套使用,因此,在对拖拉机系统实现自动导航的同时,应该加大对各项配套农机具自动导航技术的应用。当拖拉机与播种机配套使用时,拖拉机按照运行轨迹进行运动,播种机同时配合自动导航系统,可以提高播种精度,田间播种更加规范,减少重播漏播现象的发生,可以提高“苗齐、苗壮”;拖拉机与翻耕机配合使用时,拖拉机按照预设路径进行田间行驶,同时实现土壤翻耕机按照不同的土壤环境进行翻耕,对于土块较大、杂草、根茬及秸秆较多的地块加大翻耕力度和强度,提高土壤翻耕工作效率;当拖拉机与联合收获机配合使用时,收获机割台操作实现自动控制与农作物信息识别技术,对作物成熟度进行自动判别,对果实位置进行精准定位,提高果实收获的工作效率。
5 结语
本研究对拖拉机自动导航系统中的关键技术进行分析,并以此为基础分析目前国内外拖拉机自动导航系统发展历程及在实际应用过程中存在的问题,提出我国未来发展拖拉机自动导航系统工作效率的主要研究方向与研究重点,本文对于提高拖拉机自动导航系统的工作效率提供技术参考与理论基础。
(05)
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
四川农业与农机(2019年4期)2019-08-29
中国惯性技术学报(2017年1期)2017-06-09
小学生导刊(2017年15期)2017-05-17
小布老虎(2016年12期)2016-12-01
百科探秘·航空航天(2016年9期)2016-12-01
山东农机化(2015年6期)2015-01-03
河南科技(2014年1期)2014-02-27
