基于龙芯处理器的稳控系统装置平台及应用
2022-03-15 12:51:58李友军周华良颜云松戴欣欣陈永华徐广辉
电力系统保护与控制 2022年5期
李友军,郭 勋,周华良,颜云松,戴欣欣,陈永华,徐广辉
基于龙芯处理器的稳控系统装置平台及应用
李友军1,2,郭 勋2,周华良1,2,颜云松1,2,戴欣欣2,陈永华2,徐广辉2
(1.智能电网保护和运行控制国家重点实验室,南瑞集团(国网电力科学研究院)有限公司,江苏 南京 211106;2.国电南瑞科技股份有限公司,江苏 南京 211106)
安全稳定控制装置作为保障电网安全稳定运行的第二、三道防线核心二次设备,关键部件国产化程度不高,亟需国产化改造。为解决安全稳定控制装置自主化面临的主控芯片选型困难、处理器实时性稳定性不高等问题,从芯片自主化标准的研究出发,提出了一种基于龙芯处理器的安全稳定控制装置系统框架,主要包括整体平台架构设计、核心功能模件设计、实时数据交互、兼容性设计,以及基于该平台的稳控应用设计等。从硬件和软件两方面对自主可控稳控系统装置平台设计原理进行了阐述。基于该平台方案设计的安全稳定控制装置已在多座变电站挂网试运行,运行情况良好。同时,与在运装置具备良好的兼容替换性。
国产化;自主化;自主可控;安全稳定控制平台;稳控装置;兼容性
0 引言
安全稳定控制装置(系统)(简称稳控系统装置) 是保证电力系统安全稳定运行的第二和第三道防线的核心二次设备,其在任何条件下的稳定供应和正常运维均需得到可靠保障[1-2]。在当前电力二次设备芯片国产化率低及进口芯片存在断供、卡“脖子”风险的环境下,设计开发自主可控的稳控系统装置符合当前实际应用需求。
当前在运稳控系统装置经历了几代的发展,已由单一的8位CPU、10位A/D采样、串口通信的单CPU硬件体系发展到基于SOC的多CPU协同工作、高速通信、高精度采样的新平台[3],为自主可控稳控系统装置平台的研制奠定了基础。在体系架构上,稳控装置大多采用分布式架构和多板卡部署的设计方式[4],具有扩展方便、配置灵活的特点。目前基于进口芯片的稳控系统装置及大型稳控系统在可靠性方面已有大量的研究[5-8],在接口网络化方面也已经有众多研究成果[9-10],且嵌入式以太网技术在稳控系统装置中的应用研究也有报道[11]。但电网二次核心设备的关键部件仍依赖进口,这对电网运维的自主可控构成威胁。文献[12]从智能电网安全的角度阐述了自主可控对智能电网的重要意义,并对影响智能电网安全与自主可控程度的指标进行了分析和测评。
本文研制的自主可控稳控系统装置平台是在继承了多年安全稳定控制装置研发及成功运行经验的基础上,结合自主可控芯片的特点进行的适配开发。针对国产元器件成熟度不高和工程应用不足的问题[13-14],通过整体体系优化设计弥补部件级技术性能差距,实现国产自主可控装置整体性能对标在运装置。本文详细阐述了主处理器的选型思路,以及平台体系架构、实时数据交互方案、核心功能模件设计、板级和装置级兼容性设计等。此外介绍了基于该平台的稳控系统装置的研制及实际工程应用情况。
1 主处理器选型
在研制自主可控稳控系统装置时,需对处理器的自主可控选型原则进行定义,但目前业界还没有公认的自主可控处理器定义标准。
国内发展较好的CPU有龙芯、飞腾和申威三种[15]。申威处理器采用自主指令集、Alpha架构,其产品多用于服务器;飞腾处理器是国防科技大学为“天河”系列超级计算机量身定制的银河飞腾系列通用CPU,多基于ARM架构,其CPU产品主要用于PC、笔记本和服务器;龙芯处理器由龙芯中科自主设计,采用基于MIPS优化后的自主指令集,可对指令集进行优化升级和扩展,不受外部限制,且经多年的发展在军工[16]、宇航[17]、工业控制[18]等领域的嵌入式系统中得到较多应用。
虽然当前国产芯片发展迅猛[19-20],在细分行业领域有所突破,但整体差距明显,仍处于追赶阶段。自主可控处理器芯片普遍存在集成度不高、设计复杂、功耗高等不足;生态系统正在快速丰富阶段;尚无高性能的专用DSP处理器;这些均为自主可控处理器芯片的选型带来了诸多困难。
本文参考文献[21]对自主可控的定义,从芯片的性能、芯片封装测试及设计的厂商国籍、IP核授权形式、处理器核心架构、指令集开放性等几方面,对芯片的自主可控水平和能力进行评估。并结合电力二次设备稳控系统装置嵌入式应用场景和功能需求,选取龙芯2K1000处理器作为稳控系统装置平台的核心处理器。
龙芯2K1000处理器片内集成两个64位的双发射GS264处理器核,支持全流水的浮点加减、乘法、乘加等运算,主频可达1 GHz,同在运装置DSP处理器计算性能基本相当;芯片结温范围在-25º~ 125º,满足装置工作环境温度在-10º~55º之间的要求;另外片内还集成有丰富的高速和低速外设接口,功能框图如图1所示。
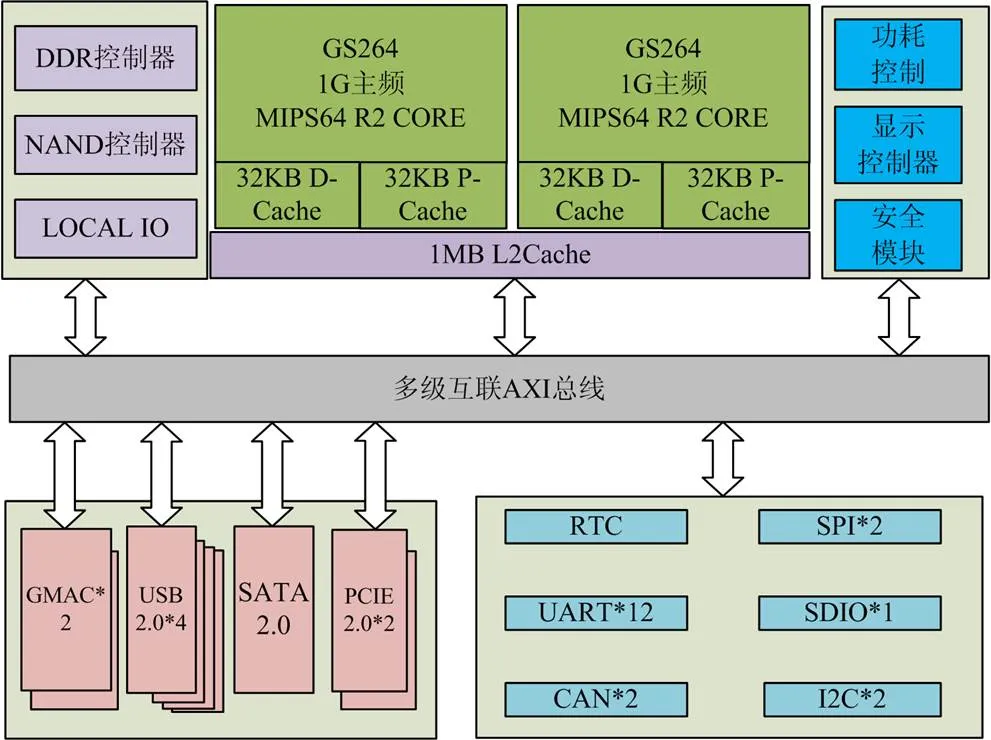
图1 龙芯2K1000功能框图
2 基于龙芯的稳控系统装置平台设计
针对龙芯2K1000外设接口特点,本文通过现场可编程门阵列(Field Programmable Gate Array, FPGA)扩展过程层及站控层的网络接口,实现装置接口网络化。各个模件通过背板总线进行数据交换,实现分布式架构的搭建。
2.1 平台架构设计
稳控系统装置通常包括管理模件、逻辑处理模件、通信模件、数字化模件、模拟采样模件、开入开出模件等。本文采用分布式架构,所有模件均通过背板总线接入系统,进行数据交换,实现数据共享和逻辑控制,架构图如图2所示。
装置背板布置了高速数据总线、非实时数据总线、管理数据总线以及同步信号线。高速数据总线采用百兆以太网接口,主要用于传输实时数据,如采样值、实时计算量等;非实时数据总线采用USB转以太网接口,主要传输SOE、模拟量的幅值、相角等;管理数据总线采用CAN总线通信,主要负责模件配置、参数、调试等系统管理类的数据;数据同步信号线主要用于装置内部各模件之间的数据同步,由管理模件发同步脉冲,其他模件利用该信号同步自己的数据及时间。
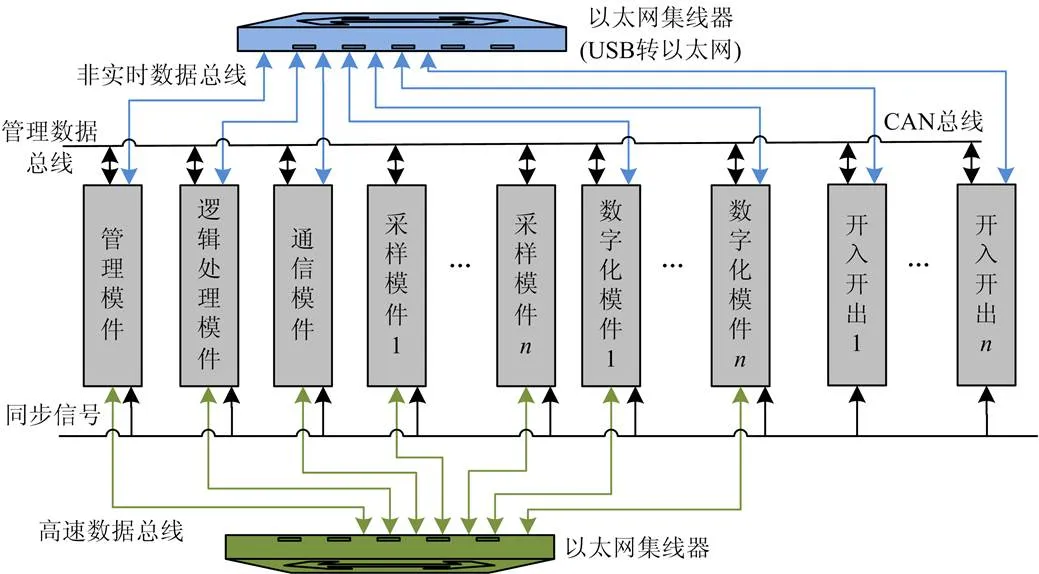
图2 基于2K1000的稳控系统装置平台架构
模件根据自身功能需要选择总线类型。管理模件、逻辑处理模件、通信模件和数字化模件既接入
高速数据总线,也接入非实时数据总线;采样模件仅接入高速数据总线;开入开出模件仅接入非实时数据总线。所有模件均接入管理数据总线,能够接收和响应管理模件的命令、参数等报文,并定时向管理总线发送心跳等监视报文。
2.2 实时数据共享设计
实时数据共享是稳控系统装置各个模件协同计算和逻辑控制的关键。通过模件间数据共享,装置的所有模件可按照各自的逻辑独立运行,并相互协同。逻辑处理模件获得实时的各采样间隔通道数据,计算并根据事先制定的离线策略表控制启动和出口继电器。通信模件根据稳控功能需求配置,获得实时的远方通道数据和各子机实时采样数据,并做分类解析处理,将有效数据通过高速数据总线发送给逻辑处理模件。数字化模件将网口收到的数字化采样数据进行同步和插值计算,并转换成模件的输出数据,通过高速数据总线广播发送。模拟采样模件获得的采样数据通过高速数据总线广播发送。其他模件根据自身功能需要定义实时数据,通过高速数据总线实时广播发送。模件间实时数据交换框架如图3所示。
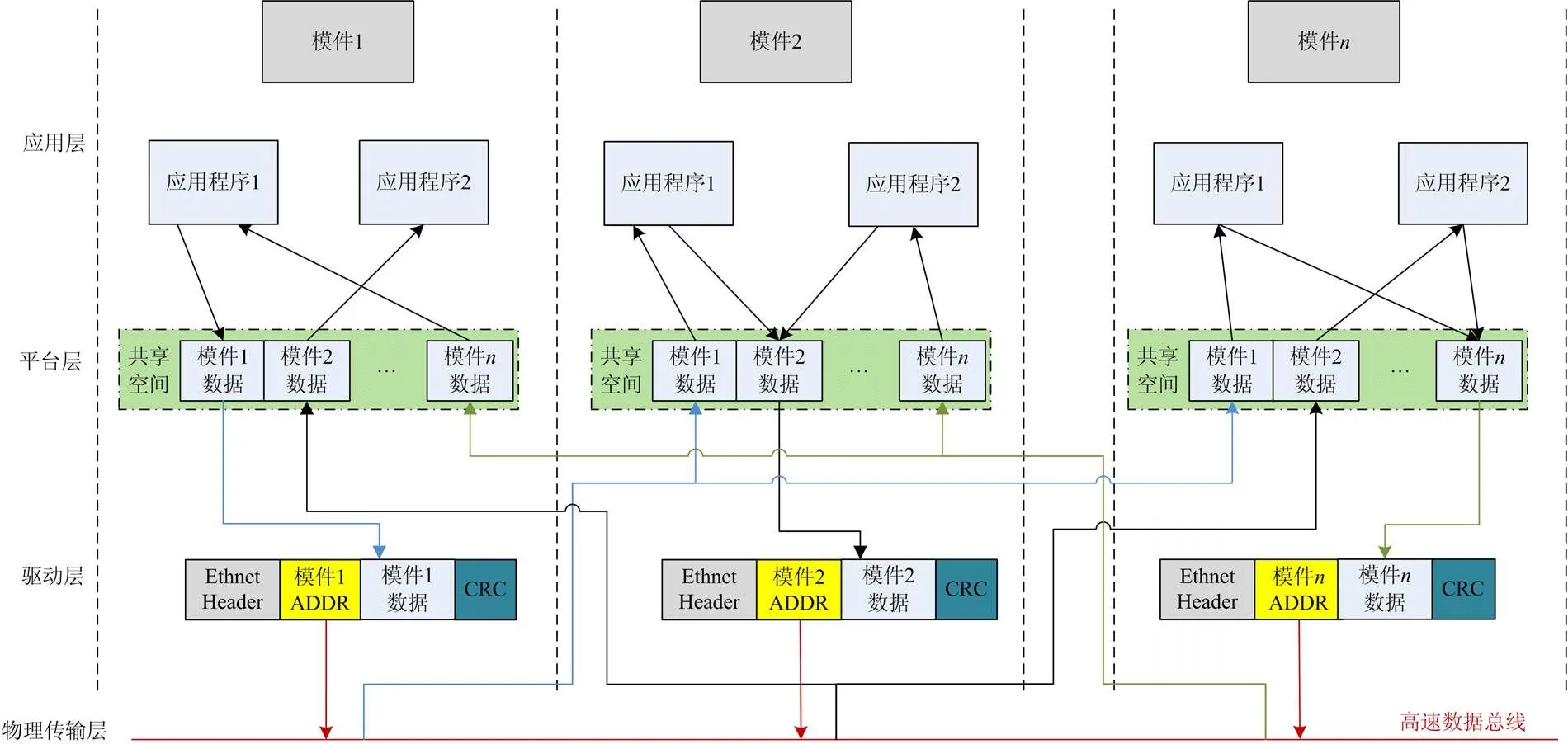
图3 模件间实时数据交换框架
模件软件程序按3层软件架构实现,分别为应用程序、平台程序和驱动程序。模件数据共享框架也分3层实现,分别是应用程序数据层、平台共享空间层、驱动数据帧收发层。应用程序根据业务需要定义输入数据、输出数据。平台程序根据应用程序定义的输入数据源,预先申请模件的共享数据区,如图3共享空间中的模件1、模件2、模件等空间,其中也包含自身输出数据区。模件接收高速数据总线上的数据,将数据复制到预先申请的对应共享内存空间。应用程序根据业务需要从共享内存中取数并开展逻辑计算,计算后将输出数据填入自身数据区。应用业务程序运行结束后,由平台程序将模件自身数据区通过高速数据总线广播,完成装置内部各个模件之间的实时数据共享。
2.3 核心功能模件设计
管理模件、逻辑处理模件、通信模件、数字化模件等核心板卡均基于龙芯2K1000处理器设计,其中管理模件部署开源Linux操作系统,其他几种核心模件基于裸核运行模式部署自主开发的简单任务调度框架。
2.3.1 管理模件
管理模件的主要功能有参数定值管理、系统配置管理、人机接口管理、对外通信管理、事件录波管理及调试打印管理等。
管理模件由4层架构组成,主要包括硬件层、操作系统层、平台层及应用层,其功能框图如图4所示。操作系统层为平台层提供标准接口,隔离底层硬件对上层应用业务的影响。平台层主要负责数据交换、系统管理、系统监视、任务监视、时钟同步等业务。公共模块应用层基于平台层的接口与数据,运行相应的业务程序,主要包括定值管理、配置管理、事件录波、通信、液晶菜单和打印等。
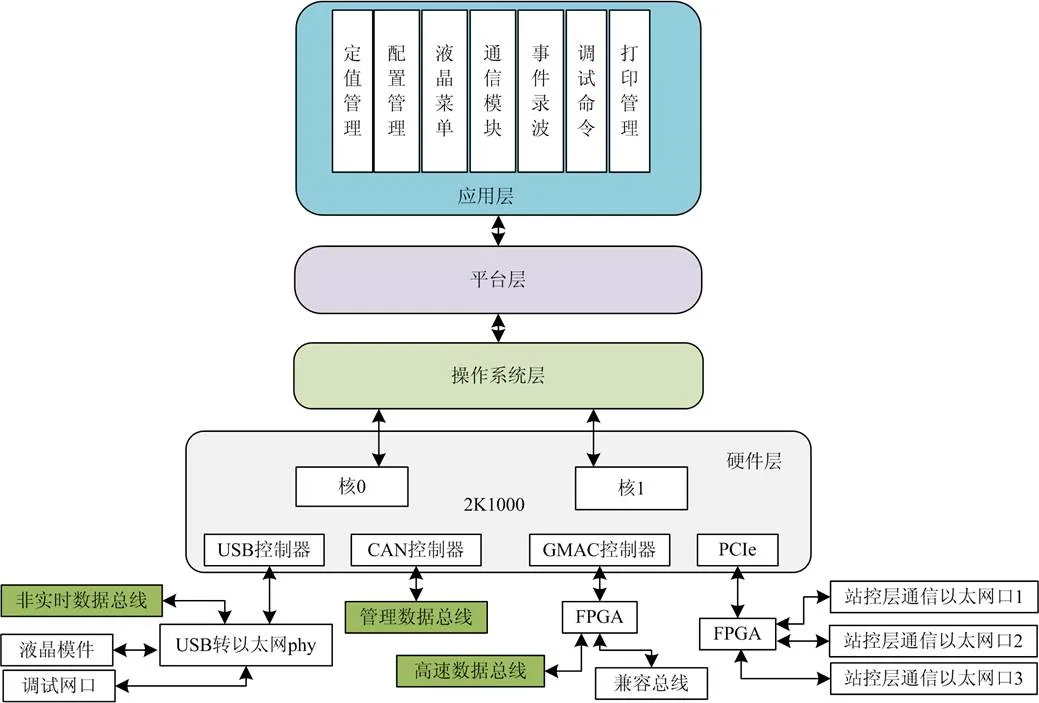
图4 管理模件层次结构及功能框图
硬件上,管理模件通过USB转以太网接入非实时数据总线,同时也接入液晶模件及调试网口;通过CAN接入管理数据总线;通过GMAC口接入FPGA,由FPGA扩展百兆MAC接口以接入高速数据总线,同时通过FPGA扩展兼容总线使其可直接无缝替换在运稳控系统装置的对应插件;此外,3个站控层以太网通信接口通过PCIe转接FPGA,由FPGA扩展实现。
2.3.2 逻辑处理模件
逻辑处理模件功能框图如图5所示。
在硬件上,继承了管理模件的基本接口形式,其总线接口和管理模件一样,但取消了外扩的以太网接口和液晶模件接口。
软件上,2K1000的两个核采用相同层级结构,分别运行独立的程序,双核之间通过共享内存交换数据。其中平台层负责处理总线上的所有数据,包括数据帧的判断、数据整理及容错处理。在报文校验正确并同步后,将数据放入共享内存,供逻辑策略模块使用。逻辑策略模块的输出数据直接填入共享内存空间,由平台层通过相应总线或通道发送出去。稳控应用逻辑策略可根据实际需求灵活部署在核0和核1上,有效分散逻辑计算和数据处理压力。通过平台层程序封装,上层稳控应用程序的接口兼容在运装置,可实现程序的无缝移植。
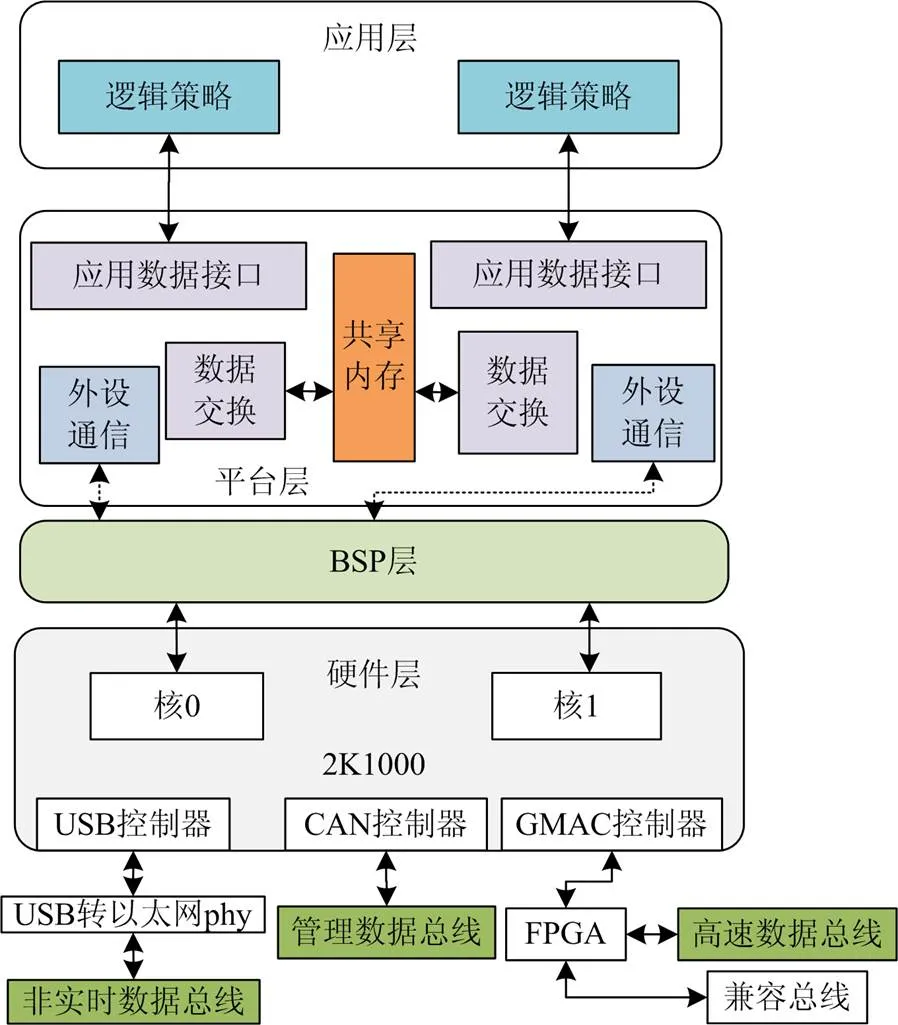
图5 逻辑处理模件层次结构及功能框图
针对国产化设备存在可靠性风险,而龙芯的DRAM控制器不支持基于硬件的错误检查和纠正技术,本文借鉴直流输电工程中的“三取二”逻辑冗余配置思想,将定值数据、关键实时数据拷贝复制成3份,分别存放入RAM空间指定的A、B、C区,并将其映射为PCIe空间。由FPGA通过PCIe总线直接访问并计算各区数据的校验码。逻辑策略模块取数据时,先判断A区数据是否与备份的B、C两区数据一致,若一致则取A区中数据使用;若不一致,则进入关键数据区恢复流程,具体流程如图6所示。本方案利用系统已有的FPGA协助计算各RAM存储区的校验码,既降低了对稳控应用逻辑策略程序的干扰,又提高了装置的动作可靠性。
2.3.3 数字化/通信模件
数字化/通信模件是在逻辑处理模件基础上,通过PCIe转FPGA扩展了8对光纤以太网接口及4对E1接口的2M通道。软件的层次结构如图7所示。
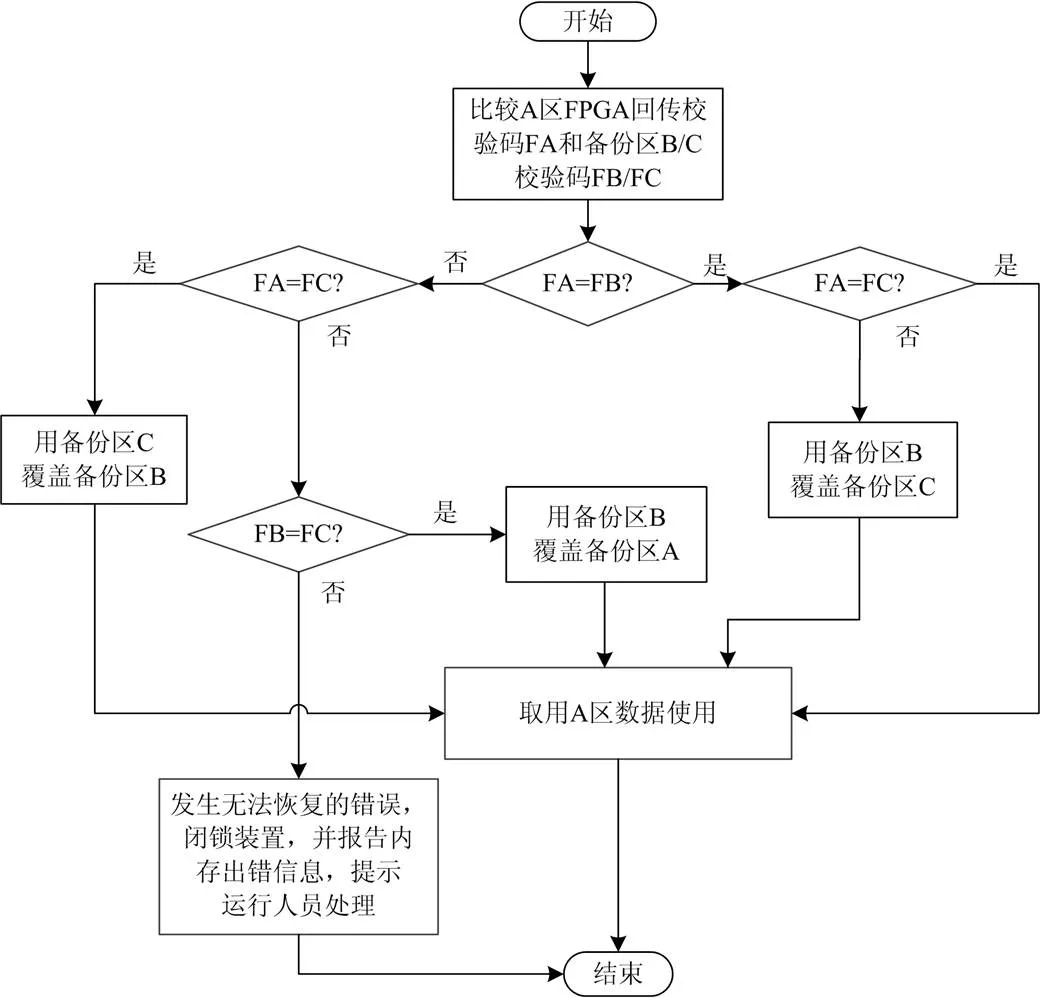
图6 数据区“三取二”逻辑流程图
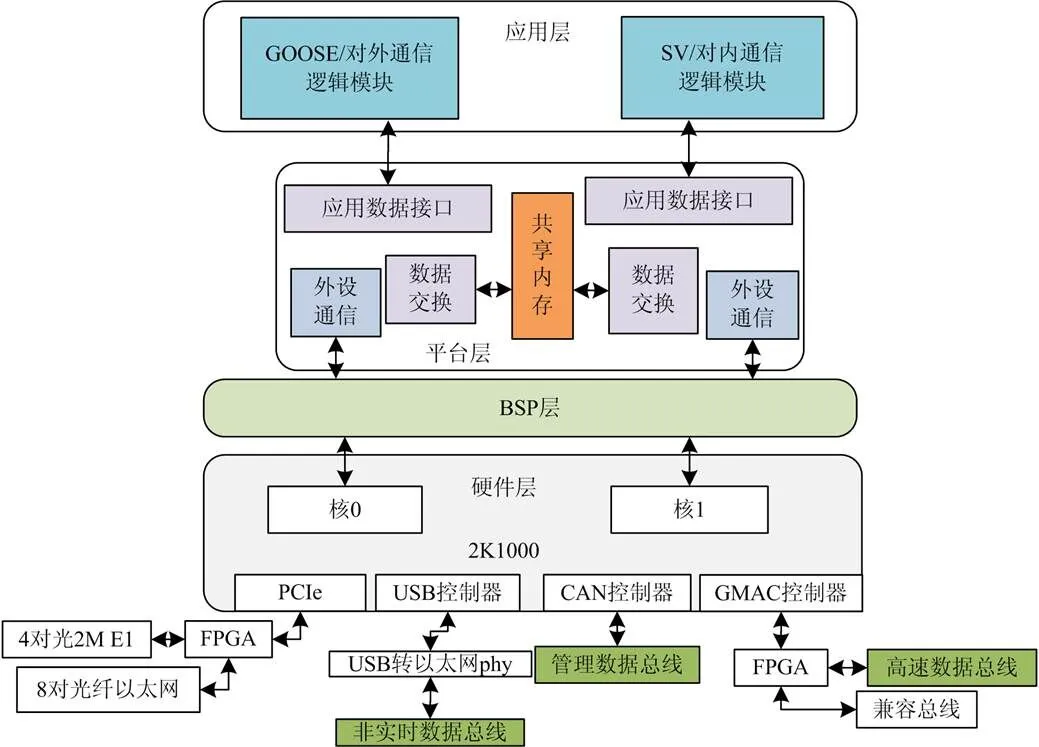
图7 数字化/通信模件层次结构及功能框图
在底层软件架构上,数字化/通信模件采取双核独立运行模式,通过共享内存交互数据。
在应用功能部署上,数字化模件作为稳控系统装置用于数字化智能变电站的接口插件,负责接收数字化采样及处理数字化开入开出;面向通用对象的变电站事件模块(Generic Object Oriented Substation Event, GOOSE)和采样值模块(Sample Value, SV)分别部署在核0和核1上,相互解耦。也可仅部署GOOSE功能或仅部署SV功能,与在运装置模件可兼容替换。
另一方面,通信模件作为稳控主机上的通信接口插件,负责与稳控系统的级联子机、级联主机、通信接口装置通信,接收、汇集各级联的稳控系统信息及远方控制命令信息。对外通信逻辑功能和对内通信逻辑模块分别部署在核0和核1上,相互解耦。对外通信逻辑模块根据配置文件对通过平台层数据交互处理模块获取的各网口及2M通道口报文数据做解析、封装处理;同时,通过平台层的数据交互处理,对内通信逻辑模块负责解析处理来自逻辑处理模件的应用数据,并通过内存空间共享数据。稳控系统各级联装置信息在通信模件上的解析处理,极大地分担了逻辑处理模件的计算压力。
2.4 兼容性设计
为实现板件级的无缝替换,自主化稳控系统装置从硬件和软件两方面进行兼容设计。根据自主化芯片的特点,本文采取保持在运装置背板信号线不变,将新增加的信号线全部布置到空闲位置的方法以实现硬件上的兼容。所有板件均采用硬件组件化的方法,设计了覆盖全部在运装置信号线的兼容总线,以实现板件在电气信号连接上的兼容。在软件设计上,在运稳控系统装置和自主可控装置均采用相同软件平台框架,配置及数据交换定义完全相同,应用程序接口保持一致,从而实现软件上的兼容一致。
典型的区域型安全稳定控制系统普遍采用“分层分布”式主从结构设计,由主站、子站、执行站三级稳控装置组成。站间、A/B套装置之间通过光纤以太网或E1接口 2M通道交互数据。装置级的兼容替换需保证装置尺寸等硬件上及软件通信传输协议上的兼容性。
通过梳理在运装置的外形、尺寸、界面显示、按键布局、端子规格及其信号定义,确保新设计的自主化稳控系统装置的上述特性与在运装置完全一致。软件上,确保稳控装置之间(站间)通信报文帧格式与在运装置一致,以实现装置级的无缝替换。
3 自主可控装置平台在稳控系统的应用
3.1 稳控系统同步采样
在处理诸如电网宽频段振荡这类问题时,区域型稳控系统应用常需采集同一时间断面下多间隔电气量信息,分析比较振荡时相量特征,对振荡源的准确搜索和控制具有重要意义[22]。当前稳控装置的同步对时多依赖于外部GPS或北斗系统时间同步信息,对时同步精度达微秒级。但不管GPS对时还是北斗对时均存在因环境因素(现场接线、天线位置、天气阴晴等)影响卫星信号的稳定可靠接收,造成对时信号弱或信号丢失的情况,为此需研究不依赖于外部对时的系统同步方案,以确保装置在外部对时信号丢失情况下的稳定可靠运行。
对于单装置内部各模件之间的数据同步,基于龙芯2K1000的稳控系统装置平台通过背板数据同步信号线来实现,由装置内对时模件发同步脉冲,其他模件利用该信号同步自身数据。此外,对时模件定时通过非实时数据总线向其他板件广播发送时间信息,以实现装置内各板件时间同步。
对于同一变电站内机箱装置级的采样数据同步,基于龙芯2K1000的稳控系统装置平台复用通信插件上的正常应用业务网络通道(降低对通信网口数量的占用损耗),部署基于IEC61588对时协议的网络对时,以实现同一变电站内稳控系统装置间的时间同步。网络对时连接方式设计如图8所示,站内稳控系统以稳控主机为主时钟,同步与其连接的各稳控子机;在多主机稳控系统中,上层主机作为时钟源(主钟),下一级主机作为从钟,同步精度达微秒级。装置内各板件依据系统同步信息,以均分秒脉冲的方式,实现装置采样脉冲的同步,并依据采样脉冲进行AD采样,从而实现整系统的采样同步。

图8 系统同步对时连接示意图
3.2 工程实际应用
基于自主可控装置平台设计的稳控系统装置,已在宁夏750 kV沙湖变(智能站)、甘肃酒泉330 kV瓜州变、广东惠州220 kV维布变、广西南宁220 kV横县变等顺利投入挂网试运行,运行稳定可靠。下面以沙湖变(智能站)为例介绍基于2K1000的自主可控稳控系统装置的实际应用。
750 kV沙湖变是伊克昭-沂南±800 kV特高压直流输电工程送端电网安全稳定控制系统的重要组成部分,系统通道配置示意图如图9所示。750 kV沙湖变的本体功能是监测伊克昭-沙湖三回线运行状态、判断线路故障;向伊克昭换流站交流侧稳控装置发送线路投停状态及故障信息;同时,接收伊克昭换流站交流侧稳控装置联切伊克昭-沙湖线路命令,并跳相应线路开关。
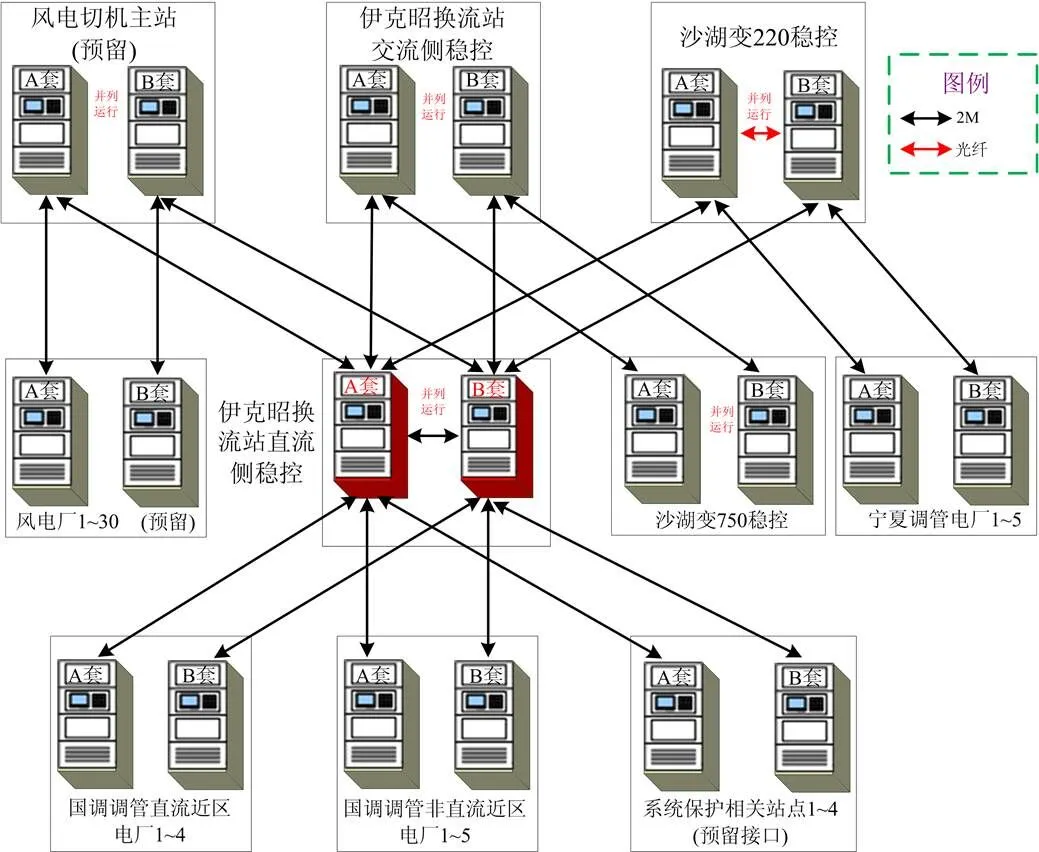
图9 系统通道配置示意图
750 kV沙湖变稳控系统装置采取双套配置,双主运行模式,共接入750 kV伊克昭-沙湖1~3线3回线路,GOOSE输入采集伊克昭-沙湖1~3线A、B、C三相边开关TWJ状态,GOOSE出口直跳伊克昭-沙湖1~3回线边、中开关;除了需要与变电站后台通信外,还需与远方伊克昭换流站交流侧A/B套稳控装置通信,共需要2个远方通信通道。针对上述实际功能需求,该站挂网试运行的自主可控稳控系统装置由1块管理模件、1块逻辑处理模件,1块数字化模件(配置为支持GOOSE功能)、1块模拟采样模件、1块通信模件、2块开入开出模件及电源模件组成,无需额外配置稳控子机(稳控子机为主机扩展采样间隔及开入开出规模的扩展设备)。
与远方上级稳控装置通信采用通信模件的E1接口2M通道实现,其通信系统结构如图10所示。
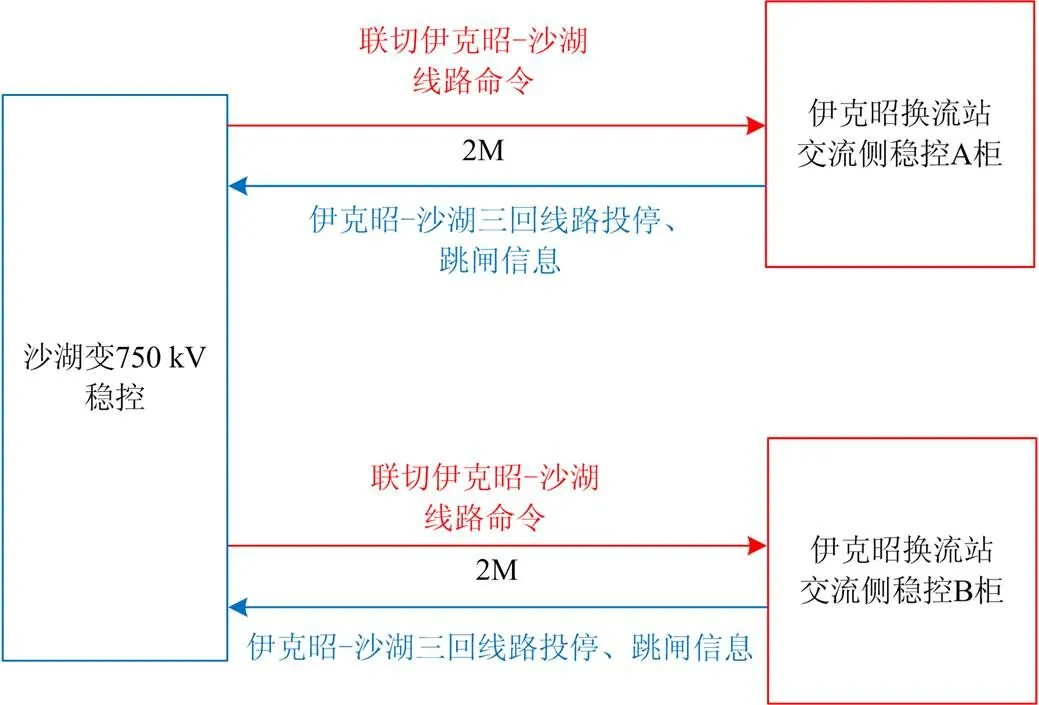
图10 站间通信系统示意图
在挂网试运行的联调中,对自主可控稳控装置的常规性能指标进行了测试,并与在运装置进行了对比分析,如表1所示。
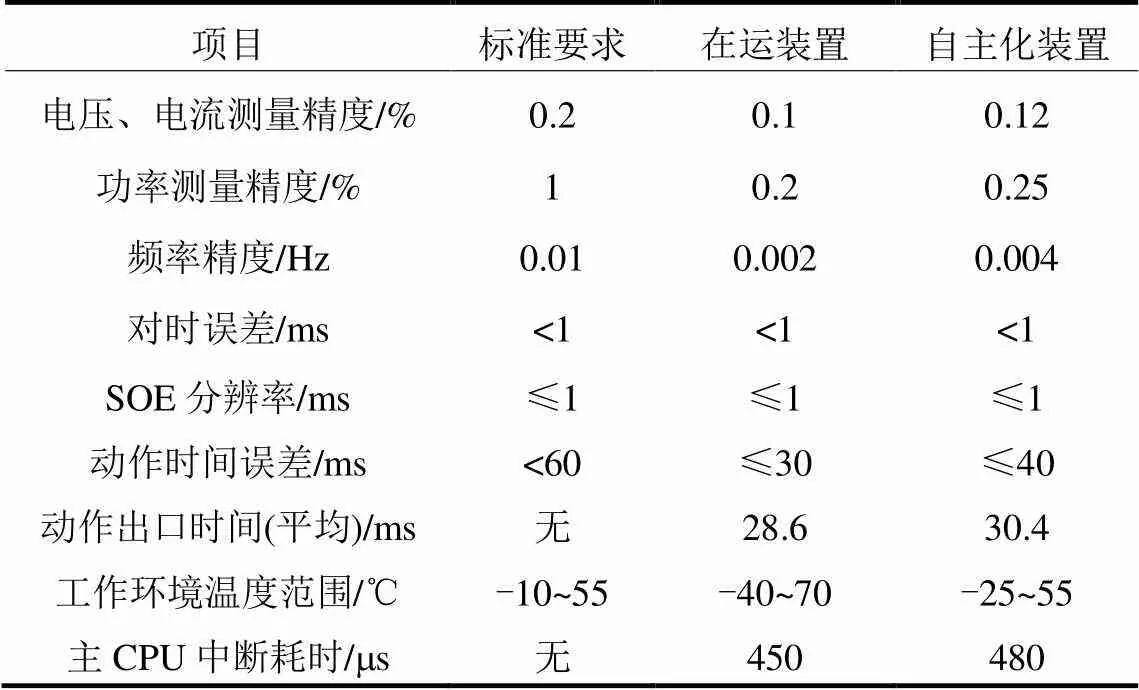
表1 稳控系统装置常规性能指标比较
从表1中可以看出,基于2K1000的自主可控稳控系统装置各项性能满足安全稳定控制装置DL/T 478-2013标准[23]的要求。因国产芯片元器件性能与进口芯片存在差异,自主可控装置电压、电流及功率测量精度略低于在运装置;动作出口时间比基于进口芯片的在运稳控装置慢0~1.6 ms。装置整组动作时间误差比在运装置误差大,主要原因是国产继电器出口速度稍慢,且动作时间一致性稍差一些,但仍与在运装置性能相当,满足稳控系统的实时性要求。
4 结论与展望
本文通过研究处理器自主可控标准,选择了龙芯2K1000处理器作为稳控系统装置平台的核心处理器,完成了自主可控稳控系统装置的研制,为电网提供了一套可推广的、具有完全自主可控能力的安全稳定控制装置平台。并解决了板件级和整装置级的兼容替换问题,基于此平台开发的自主可控稳控系统装置与在运装置可实现无缝替换,保障了电网的战略备用安全。
自主可控稳控系统装置运行性能、稳定性、可靠性及环境适应性仍需通过长期、大量的现场实践来进行验证、改进和优化,尤其需要运行管理单位、设备厂家、芯片厂家等各单位的长期紧密合作,闭环反馈、迭代升级,共同促进自主可控国产设备的持续发展。同时,为提升国产自主可控处理器的市场竞争力,芯片厂家需要在芯片封装设计、功耗、芯片内部资源容量、外设控制器性能及软件生态等几个方面继续改进和完善。
[1] 陈兴华, 李峰, 陈睿, 等. 计及安全稳定二、三道防线的电网运行风险评估[J]. 电力系统保护与控制, 2020, 48(4): 159-166.
CHEN Xinghua, LI Feng, CHEN Rui, et al. Risk assessment of power grid operation considering second and third defense line of security and stability[J]. Power System Protection and Control, 2020, 48(4): 159-166.
[2] 彭云豪, 董希建, 周海强, 等. 电网安全稳定控制系统可靠性评估[J]. 电力系统保护与控制, 2020, 48(13): 123-131.
PENG Yunhao, DONG Xijian, ZHOU Haiqiang, et al. Reliability evaluation of power grid security and stability control system[J]. Power System Protection and Control, 2020, 48(13): 123-131.
[3] 宋锦海, 李雪明, 戴永荣, 等. 新一代分布式稳定控制装置FWK-300及其应用[J]. 电力系统自动化, 2005, 29(7): 98-100.
SONG Jinhai, LI Xueming, DAI Yongrong, et al. Application of new distributed stability control device FWK-300[J]. Automation of Electric Power Systems, 2005, 29(7): 98-100.
[4] 周华良, 郑玉平, 姜雷, 等. 基于点对点通信的分布式实时控制技术[J]. 电力系统自动化, 2015, 39(10): 107-111.
ZHOU Hualiang, ZHENG Yuping, JIANG Lei, et al. A distributed real-time control technology based on point-to-point communication[J]. Automation of Electric Power Systems, 2015, 39(10): 107-111.
[5] 赵丽莉, 王梦璕, 倪明, 等. 安全稳定控制装置硬件系统可靠性分析[J]. 电力系统保护与控制, 2016, 44(13): 67-73.
ZHAO Lili, WANG Mengxun, NI Ming, et al. Analysis of hardware system's reliability of security and stability control device[J]. Power System Protection and Control, 2016, 44(13): 67-73.
[6] 彭云豪, 董希建, 周海强, 等. 电网安全稳定控制系统可靠性评估[J]. 电力系统保护与控制, 2020, 48(13): 123-131.
PENG Yunhao, DONG Xijian, ZHOU Haiqiang, et al. Reliability evaluation of power grid security and stability control system[J]. Power System Protection and Control, 2020, 48(13): 123-131.
[7] LI X M, LIU Z J, TANG Y. Reliability analysis of the security and stability control device based on the Monte Carlo method[C] // Applied Energy Symposium and Forum on Renewable Energy Integration with Mini/Microgrid REM 2017, October 18-20, 2017, Tianjin, China: 9-14.
[8] PANTELI M, CROSSLEY P A, FITCH J. Determining the reliability requirements of system integrity protection schemes[C] // IEEE/2014 International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), July 7-10, 2014, Durham, UK: 1-6.
[9] 郑玉平, 吴通华, 戴魏, 等. 变电站二次设备就地化系统网络架构探讨[J]. 电力系统自动化, 2017, 41(16): 20-26.
ZHENG Yuping, WU Tonghua, DAI Wei, et al. Discussion on network architecture of outdoor installation protection system in substation[J]. Automation of Electric Power Systems, 2017, 41(16): 20-26.
[10] 周华良, 郑玉平, 姚吉文, 等. 面向智能变电站二次设备的网络报文管控技术[J]. 电力系统自动化, 2015, 39(19): 96-100.
ZHOU Hualiang, ZHENG Yuping, YAO Jiwen, et al. Network packet control technology for secondary equipments in smart substation[J]. Automation of Electric Power Systems, 2015, 39(19): 96-100.
[11] 朱科, 周良松, 周启文. 嵌入式以太网在稳定控制装置中的应用[J]. 电力系统保护与控制, 2006, 34(3): 66-70.
ZHU Ke, ZHOU Liangsong, ZHOU Qiwen. Application of embedded Ethernet in stability control device[J]. Power System Protection and Control, 2006, 34(3): 66-70.
[12] 张京京, 荀鹏, 冯健飞, 等. 智能电网安全与自主可控的分析与评测[J]. 计算机技术与发展, 2016, 26(5): 79-85.
ZHANG Jingjing, XUN Peng, FENG Jianfei, et al. Analysis and evaluation of smart grid security and self-development controllability[J]. Computer Technology and Development, 2016, 26(5): 79-85.
[13] 廖勇, 袁圆. 进口元器件自主可控的风险分析及对策建议[J]. 电子元件与材料, 2020, 39(6): 14-18.
LIAO Yong, YUAN Yuan. Risk analysis and countermeasure of independent controllability of imported components[J]. Electronic Components and Materials, 2020, 39(6): 14-18.
[14] 郭长荣. 基于软硬件协同的国产处理器可靠性环境试验技术研究[D]. 广州: 华南理工大学, 2018.
GUO Changrong. Research on reliability environment testing technology of domestic processor based on co-ordination of hardware and software[D]. Guangzhou: South China University of Technology, 2018.
[15] 方雪. 基于自主可控计算平台的指挥控制系统架构[J]. 电子技术与软件工程, 2019(21): 131-132.
FANG Xue. Command and control system architecture based on autonomous controllable computing platform[J]. Electronic Technology & Software Engineering, 2019(21): 131-132.
[16] 段祉鸿, 狄世超, 陈令刚. 基于龙芯处理器定瞄计算机的定位瞄准控制方法[J]. 工业控制计算机, 2020, 33(8): 43-46.
DUAN Zhihong, DI Shichao, CHEN Linggang. Location and collimation control method based on aiming computer using Loongson processor[J]. Industrial Control Computer, 2020, 33(8): 43-46.
[17] 徐帅, 林宝军, 刘迎春, 等. 基于龙芯宇航级芯片的BSP开发和移植[J]. 计算机工程与科学, 2020, 42(4): 571-579.
XU Shuai, LIN Baojun, LIU Yingchun, et al. Development and transplantation of BSP based on Godson aerospace chip[J]. Computer Engineering & Science, 2020, 42(4): 571-579.
[18] 任礼虎. 一种基于龙芯2K1000的PLC产品设计方法[J]. 电子技术设计与应用, 2018(4): 48-50.
REN Lihu. A design method of PLC based on Loongson 2K1000[J]. Electronic Technology, 2018(4): 48-50.
[19] 庄志旸, 周建玉, 栾飞飞, 等. 基于国产芯片的分散控制系统在电厂改造中的应用[J]. 电工技术, 2020(24): 7-9.
ZHUANG Zhiyang, ZHOU Jianyu, LUAN Feifei, et al. Application of distributed control system based on domestic chip in power plant reconstruction[J].
[20] 冯晓华, 张尧, 岳峰, 等. 基于自主化电力专用芯片的电力保护装置设计[J]. 电力设备管理, 2020, (12): 161-162.
ZHANG Xiaohua, ZHANG Yao, XUE Feng, et al. Design of power protection device based on autonomous power chip[J]. Electric Power Equipment Management, 2020(12): 161-162.
[21] 刘凡. 核心信息技术自主可控分级研究[J]. 电子世界, 2019(1): 45-47.
LIU Fan. Research on self-controllable classification of core information technology[J]. Electronics World, 2019(1): 45-47.
[22] APPASANI B, MOHANTA D K. A review on synchrophasor communication system: communication technologies, standards and applications[J]. Protection and Control of Modern Power Systems, 2018, 3(4): 383-399.
[23] 国家能源局. 继电保护和安全自动装置通用技术条件: DL/T 478—2013[S]. 北京: 中国电力出版社, 2014.
National Energy Commission. General specification for relaying protection and security automatic equipment: DL/T 478—2013[S]. Beijing: China Electric Power Press, 2014.
Device platform and application of a stability control system based on a Loongson processor
LI Youjun1, 2, GUO Xun2, ZHOU Hualiang1, 2, YAN Yunsong1, 2, DAI Xinxin2, CHEN Yonghua2, XU Guanghui2
(1. State Key Laboratory of Smart Grid Protection and Control, NARI Group Corporation, Nanjing 211106, China;2. NARI Technology Co., Ltd., Nanjing 211106, China)
As the core secondary equipment of the second and third line of defense to ensure the safe and stable operation of the power grid, the safety and stability control device is not high in the degree of localization of key components. Thus the transformation of localization is urgently needed. There are problems of difficulty in selecting the main control chip and the poor real-time and stability of the processor faced by the autonomy of the safety and stability control device. Thus, starting from the research of chip localization standards, a system framework for a safety and stability control device based on the Loongson processor is proposed. It mainly includes the overall platform architecture design, core function module design, real-time data interaction, compatibility design, and stability control application design based on the platform, etc. The design principle for the device platform of the autonomous and controllable stability control system is described from the aspects of hardware and software. The device designed based on the platform scheme has been put into trial operation in several substations, and in is good condition. At the same time, it has good compatibility and makes effective replacement with the devices in operation.
localization; autonomization; autonomous controllability; safety and stability control platform; stability control device; compatibility
10.19783/j.cnki.pspc.210337
国家重点研发计划项目资助(2021YFB2401000);国家电网有限公司总部科技项目资助(5700-202040263A-0- 0-00)
This work is supported by the National Key Research & Development Program of China (No. 2021YFB2401000).
2021-03-29;
2021-11-08
李友军(1975—),男,硕士,高级工程师,研究方向为电力系统自动化及电力二次设备软件平台技术研究与开发;E-mail: liyoujun@sgepri.sgcc.com.cn
郭 勋(1987—),男,通信作者,硕士,高级工程师,研究方向为电力二次设备平台软件技术研究与开发;E-mail: guoxun@sgepri.sgcc.com.cn
周华良(1980—),男,硕士,正高级工程师,研究方向为电力二次设备软硬件共性平台技术研究与开发。
(编辑 许 威)
猜你喜欢
汽车与驾驶维修(维修版)(2024年6期)2024-07-03 15:42:45
设备管理与维修(2022年21期)2022-12-28 07:34:24
中国交通信息化(2022年9期)2022-10-28 06:15:42
装备制造技术(2021年5期)2021-08-14 01:44:44
科技资讯(2017年27期)2017-11-24 10:06:06
华人时刊(2016年13期)2016-04-05 05:50:06
信息安全与通信保密(2015年9期)2015-11-02 02:03:36
综合智慧能源(2015年4期)2015-06-05 14:56:55
综合智慧能源(2015年3期)2015-06-05 14:56:49
中国高新技术企业(2015年16期)2015-04-30 21:30:07