1 km以浅多参量混合编帧式数据采集系统设计
2022-03-15 12:24:44郑永秋刘亚兵景俊民张浩凌管今哥臧俊斌
仪表技术与传感器 2022年2期
郑永秋,王 旋,刘亚兵,景俊民,张浩凌,管今哥,臧俊斌
(1.中北大学,仪器科学与动态测试教育部重点实验室,山西太原 030051;2.华阳新材料科技集团有限公司装备管理部,山西阳泉 045008)
0 引言
海洋湍流混合是能量传输的重要源动力,是实现海洋透明化的有待解决的关键科学问题,海洋湍流的观测对气象观测、海洋动力研究等问题具有重要的意义。现有的海洋湍流观测仪研究范围主要集中在km以浅的海域,且湍流传感器以一维传感器为主,缺少矢量性、高分辨率的湍流传感器,不能满足6 km全海深的湍流探索,文献[1]提出了基于MEMS技术的全海深湍流混合矩阵式剖面观测仪的研究,该仪器以MEMS二维矢量湍流传感器为核心,采用剖面仪搭载4个子设备的结构,在500 m深度对子设备进行同步抛载,子设备继续下沉至深海6 km处进行湍流数据及其他数据的观测[1]。
基于上述情况,本文提出了基于FPGA的km以浅多参量混合编帧式数据采集系统设计,该系统能够采集存储温盐深仪(CTD)、姿态传感器、罗经传感器和MEMS湍流传感器数据,设计了释放开关进行子设备的抛载,采用光模块OCM3343进行数据的实时传输,具备了确保剖面仪在深度适宜、姿态平稳的情况下进行子设备抛载的条件[2]。
1 总体设计方案
本系统对温盐深仪(CTD)、姿态传感器、罗经传感器、MEMS湍流传感器数据进行采集存储,为确定子设备的抛载时间和位置,对前3种传感器数据进行实时传输并显示,设计了4种不同传输速率的传感器数据采集系统[3]。本系统设计中,主控芯片采用spartant-6系列的FPGA芯片,型号为XC6SLX9,存储采用NAND型FLASH,系统中采集接口包括2路RS232,1路RS485(预留),1路光耦隔离的I/O接口,2路模拟量输入接口,共计6路接口,以及用于子设备释放的开关电路。传感器连接采集卡相应接口,FPGA控制时序采集数据,将采集数据存储到FLASH中,同时将温度、盐度、深度、姿态等数据通过光纤传输到地面接收系统,在中控台实时显示数据,完成整个海洋数据的采集与传输。图1为整体框架设计。
2 硬件电路模块设计
2.1 模拟接口模块设计
在数据采集电路中,MEMS湍流传感器为二维矢量模拟传感器,包括X路和Y路,传感器一致性好。针对该传感器二维矢量的特点,AD选用2通道同步采集的ADS8353芯片,该芯片分辨率为16 bit,采样率为600 KSPS,通讯方式为SPI串行通讯,控制方式简单[4],能够满足同时采集MEMS湍流传感器X、Y路信号量的要求,具体的电路图如图2所示。
ADS8353在数据读取中按照下列时序进行操作,芯片使能端CS低电平有效。当CS处于低电平时,判断时钟SCLK,SCLK下降沿时,写入数据和读取数据。SDI数据在前16个时钟周期将数据写入,SDO在后16个周期将数据读出,在32个时钟周期内完成1组数据的写入和读取,CS拉高再降低,进入下1个周期。ADS8353读操作的时序图如图3所示。
2.2 RS232数据接口模块设计
本系统设计了2路RS232接口。RS232接口波特率可选,本系统中采集卡与地面接收设备使用同一控制系统。在采集卡中,RS232接口用于采集温盐深仪(CTD)和姿态传感器数据;地面中控台中,RS232接口与上位机连接进行通讯。该模块中,系统采用了MAX3232CDR芯片[5],该芯片为2路收发电路,可满足系统中2路RS232接口的要求。在采集传输板卡端,温盐深仪(CTD)与姿态传感器接口均为RS232接口[6],温盐深仪的波特率为9 600 bps,姿态传感器的波特率为115 200 bps,若改为其他波特率的传感器,可在程序上进行修改,简单方便,应用范围广。
2.3 光模块接口模块设计
光模块的设计主要是用于光纤传输,因为剖面仪中需要搭载摄像头进行视频传输,其主要功能是为直观地观测剖面仪释放4个子设备是否同步。摄像头的传输数据量大,普通的长线传输容量较小,不能满足视频传输的需求,所以选择光纤传输的方式[7]。光模块选用OCM3343型号模块,供电为3.3 V,光纤传输的速率为10 Mbps,采用的光波长为1 310 nm,光纤中可以传输多波段的光,增加光纤的利用率。一般情况下,光波长为1 310 nm的光纤损耗率每km不大于0.36 dB[8]。
2.4 开关量模块电路设计
根据剖面仪抛载子设备的需求,在采集卡中设计了开关电路。剖面仪释放结构采用电磁铁,电磁铁功能为通电断开,为保证剖面仪释放机械结构的可靠性,选用2个承重30 kg的电磁铁,该电磁铁通电电流为2 A,2个电磁铁同步通电断开需要4 A的大电流,所以选用通电电流较大的MOS场效应管作为开关电路的主要元器件[9]。MOS场效应管选用常用的FDD6637与AO3400A搭建成1个基本的开关电路,其开路电流分别为13 A与5.9 A,能够满足电路的实际需求,具体的电路图如图4所示,当SF端电平拉高,Q2导通,Q1栅极产生压差导通,输出端输出12 V电压,电磁铁断开,完成剖面仪释放功能。MOS场效应管作为开关电路,原理简单方便,电路容易控制。
2.5 FLASH存储模块
在系统要求中,对温盐深仪(CTD)、姿态传感器、罗经传感器、MEMS湍流传感器的数据进行采集,根据4种传感器的信息可以计算出所需要的存储容量,表1为4种传感器的基本信息。

表1 传感器信息表
其中MEMS湍流传感器采用ADS8353进行采样,其分辨率为16 bit,采样速率为10 KSPS,剖面仪在水中以1 m/s的速度下降,到达500 m深度大约需要500 s,由上述信息可计算出数据总量为225.786 MB
若采集返回的数据,则数据总量大概为451.572 MB。本电路中,采用型号为MT29F8G08ABABAWPIT的NAND型Flash为存储芯片,其存储量为1 GB,满足存储要求。且该芯片具有边擦除边写入的优点,能够进行高速的大容量存储,该芯片与FLASH芯片的连接属于并行I/O口连接,这样的连接方式能够提升FLASH的读写速率[10]。Flash芯片与FPGA的电气连接图如图5所示。
3 软件控制设计
3.1 总体控制流程图
该系统对多个传感器数据进行采集与存储,同时需要通过光纤将部分数据进行实时传输。传感器传输速率不同,在FPGA的时序控制下,通过编码方式将数据打包通过光纤模块进行传输[11]。
其总体工作图如图6所示,系统上电之后,电源指示灯亮,采集卡开始工作;系统同时对传感器进行供电,传感器开始工作,数据采集与数据传输工作同时进行。主控FPGA对接收到的数据进行编帧,同时将温盐深仪、姿态传感器、罗经传感器和MEMS湍流传感器4种传感器数据进行存储,将温盐深仪、姿态传感器、罗经传感器数据通过光纤进行实时传输,以便观测深度、温度、母弹姿态等的信息。
3.2 传输编帧与存储编帧
在4种不同的传感器中,我们将温盐深仪、姿态传感器、罗经传感器3种传感器的数据进行实时传输,同时将MEMS湍流传感器的数据统一编帧进行存储[12],这种设计主要是为了解决RS232串口不能实时传输湍流传感器巨大模拟量的问题,且湍流传感器数据实时传输显示的意义不大,故将其数据进行存储[13]。
传输与存储的传感器不同,设计的帧结构长度不一。为了辨别数据帧,在设计帧结构时采用帧头和帧标志的计数方式,每一帧数据包括帧头、帧标志和数据域[14]。帧头EB 9X表示不同传感器数据,其中X为4位数据有效标志,由高到低依次为CTD数据,姿态传感器数据、罗经传感器数据、AD数据,1表示有效,0表示无效。
传输帧采用定长帧结构,帧头为2 B,数据域为14 B,其中CTD和罗经波特率为9 600 bps,每帧采集1 B数据,姿态传感器波特率为115 200 bps,每帧采集12 B数据[15]。传输帧结构如图7所示。
存储帧采用不定长帧结构[16],帧头为2 B,数据域字节不确定。AD无数据的时候,采用传输帧结构;仅AD有数据时,帧结构为2 B的帧头和50 B的数据域;前3路中任意一路与AD有数据时,帧结构为2 B的帧头和66 B的数据域,存储帧结构如图8所示。
4 测试验证
进行水下测试时,将采集卡封装在水密耐压仓中,耐压仓中留有水密接头,采用双头母缆连接传感器与耐压仓,耐压仓装配在剖面仪中,剖面仪测试系统如图9所示。
测试时,上位机实时显示数据,上位机界面如图10所示。
经过长时间测试,系统工作传输数据稳定,数据存储结构完整。一帧数据包括CTD数据、姿态传感器数据、罗经传感器数据,根据数据的帧结构找到不同传感器的数据。第3帧数据表示CTD的数据,CTD数据格式为ASCII码,每组数据以“0D 0A”表示结尾。第4~15帧数据表示姿态传感器数据,其中FF FA为起始标识符,36为消息标识符,其余为接收到的数据段,从接收到的数据中可以明显的获得FF FA 36 26一串数据。第16帧数据表示罗经数据,罗经传感器需要FPGA与罗经进行实时交互,FPGA发送“68 04 00 04 08”命令,罗经传感器做出应答,应答数据包括14 B,例如一组数据“68 0D 00 84 10 26 48 00 00 26 03 09 64 A5”,其中68为命令的开头,0D为命令长度,00为设备地址,默认值,84为命令代码,其后每3字节分别为倾斜角、横滚角、方位角,该组数据采用压缩BCD码,解析结果为倾斜角为-26.48°、横滚角为0.26°、方位角为309.64°。经过上位机对数据进行处理,将数据分类显示,数据显示结果如表2所示。通过分析发现传输过程中无丢数漏数情况,传输系统稳定。
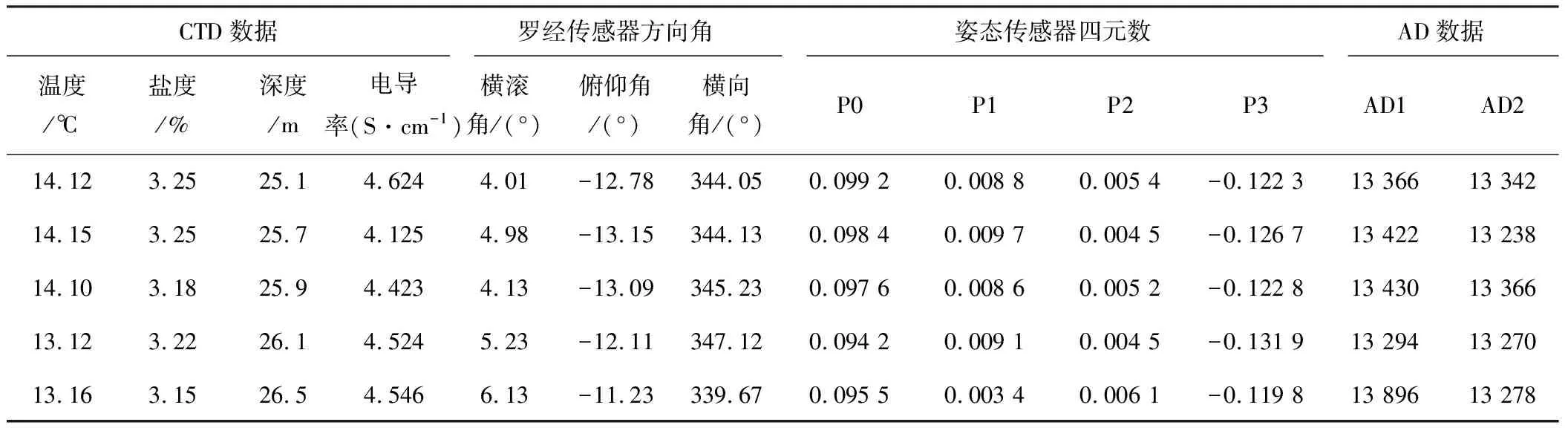
表2 传感器数据
5 结论
针对海洋多参量数据实时传输显示困难的问题,提出了多参量混合编帧式数据采集系统的设计,通过混合编帧与空位补零的设计,将不同传输速率的传感器数据采集并实时传输,该系统传输速率稳定,无丢数现象,可广泛应用于海洋环境的检测与深海资源探索中,对气象观测、海洋环流等研究具有重要意义。且该系统集成度高、成本低、能够搭载不同的传感器,后期可在FPGA的基础上进行其他功能模块的开发,且系统有10 MPa承压的耐压仓外壳封装,能够广泛应用于海洋、石油勘探等领域,具有广阔的工业应用前景。
猜你喜欢
船海工程(2021年1期)2021-03-02 05:32:02
中国船检(2020年10期)2020-11-07 09:56:38
学生天地(2020年3期)2020-08-25 09:04:16
中国特种设备安全(2018年10期)2018-12-18 02:16:56
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
教育科学论坛(2014年6期)2014-03-01 04:01:30
教育科学论坛(2014年4期)2014-03-01 04:01:14