
基于三维激光扫描技术在崖墓保护中的应用
2022-03-11 06:41冯仕超郭兴平韩彦伟
地理空间信息 2022年2期
冯仕超,郭兴平,韩彦伟,裴 志
(1.华北地质勘查局五一九大队(河北九华勘查测绘有限责任公司),河北 保定 071000)
目前,国内利用三维激光扫描技术对文物开展的研究方向大部分是古代建筑。然而,尚未见利用三维激光扫描技术对古代重要墓葬形式之一的崖墓进行扫描建模研究的报道。因此本研究基于三维激光扫描技术,对于满城汉墓的中山靖王墓室进行三维数据信息采集与存储,以期探讨三维激光扫描技术如何在崖墓文物保护中更好地发挥作用[1-8]。
1 研究区域概况及研究原理
1.1 研究区域概况
本研究所选取的满城汉墓作为古代崖墓的代表之一,是全国重点文物保护单位。满城汉墓位于河北省保定满城区主城区西南1.5 km陵山主峰东坡,因出土“金缕玉衣”而闻名于世,是20世纪我国重大考古发现之一,是西汉中山靖王刘胜及其妻窦绾之墓。墓室为依山开凿的巨大洞穴,与传统的墓葬形式不同,属于横穴墓性质,一般称之为崖墓,是目前我国发现的规模最宏大、结构最复杂、保存最完好、出土文物最多、研究价值甚高的崖墓,被称为“天下第一崖墓”。
1.2 三维激光扫描技术原理及研究路线
三维激光扫描技术是在地面利用激光扫描装置自动、系统、快速获取对象表面三维坐标的测量技术,相对于传统的测绘方式,其具有非接触式、无损,数据全面、精度高,效率高及现势性强等诸多优势。工作原理是通过测距系统获取扫描仪到待测目标的距离,再通过测角系统获取扫描仪至待测物体的水平角与垂直角,进而计算出待测物体的三维坐标信息(Xs,Zs,Zs),其中:Xs=Scosθcosα,Ys=Scosθsinα,Zs=Ssinθ。如图1所示[9]。

图1 三维激光扫描原理
2 测量流程
2.1 现场踏勘
本研究经过现场初步踏勘,中山靖王墓室全长约51.7 m,最宽处37.5 m,最高处6.8 m,室内容积约为2 700 m3。整个墓室由墓道、甬道、南耳室、北耳室、中室、后室六部分组成,总体呈现“甲”字型。墓室内通视条件差,光线阴暗,地势较平缓,地面底层设站扫描无障碍,室内相对湿度>70%。
2.2 外业数据采集
2.2.1 点云数据采集
中山靖王墓整体墓葬规模宏大,为了保证整体点云的完整性,采用Trimble三维扫描仪进行数据采集,数据采集方式为无损方式获取整体三维点云数据。根据现场工作环境和通视情况,制定了相应的点云数据采集方案,采用三维激光扫描仪沿甬道依次对墓道进行扫描,并沿行进路线对南、北耳室及主墓室等区域进行扫描工作,具体扫描路线如图2所示。每个区域采用70 m高精度模型的作业方式进行360°全方位点云数据采集工作,相邻站点之间间隔不超过100 m。整体点云点位中误差控制在1.5 cm以内,点云间距控制在2 mm以内,扫描使用仪器精度在3 mm之内。
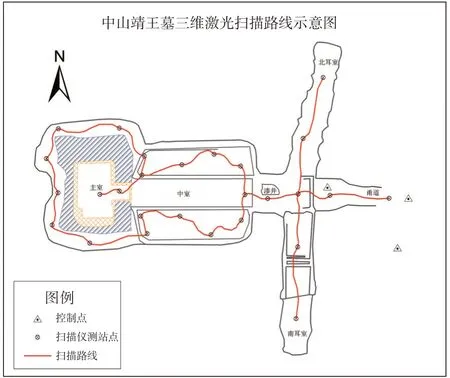
图2 中山靖王墓三维激光扫描路线示意图
2.2.2 纹理数据采集
本研究采用无损方式拍摄墓道数字影像,在原始分辨率下能够完整分辨信息采集区域采集对象的细节,所获取的图像需具有均匀一致的清晰度,不得存在因镜头失焦、光线衍射等原因导致的局部模糊等现象。
为了在整体上实现良好的质感和色彩体现,需要测试灯光照度,结合现场实际情况和白卡中白点的数值(白点RGB值230~240之间)共同参照确定。相机曝光量的控制是通过相机快门和光圈的调整共同实现的,光圈值决定镜头通光量,同时也影响拍摄画面的景深,根据采集的实际情况来调整,以保证拍摄画面的清晰度。每相邻的两张照片,重叠度大于单张照片的1/3。每个站点至少进行上、下、左、右及正立面5个角度拍摄,在墓室拐弯处需要增加纹理信息的获取。
2.3 内业数据处理
2.3.1 点云数据预处理
在扫描现场需要对点云数据进行检核,剔除粗差。为了保证数据精度,内业还需重新进行数据检核,包括点云数据的缺失程度及局部点云分层情况等。
对墓道进行三维激光扫描,需要布设多站点才能把墓道的整体形态完整的扫描出来,但每一站扫描得到的点云数据坐标都是基于本测站的局部坐标系,因此,需要将测站扫描的数据进行坐标系的统一,把扫描的点云数据统一到一个参考系,为三维建模提供基础数据,即多站点云拼接为一个完整点云。
对于三维激光扫描仪,其相应配套的配准软件是基于点约束配准的方法,其中的点根据拟合标靶球的中心获得的。点约束配准就利用2个模型中的同名点的坐标,实现由其中的一个坐标系统向基站坐标系统的转换过程。要实现三维空间坐标系统的转换,就需要3对同名点进行求解空间坐标变换参数,实现多测站的坐标统一。
点云配准的方法很多,通常在实际工程中,为了外业工作效率、数据处理效率以及点云精度通常是通过拼接标靶球完成配准。其原理是在在两测站重合区域安置多个标靶球(一般3个以上)进行扫描,再根据同名点的坐标对应,计算转换矩阵以及平移矩阵,再通过旋转矩阵和平移矩阵实现坐标转换,完成相邻两站点云的配准。
式中,(X,Y,Z)、(x,y,z)分别是2个坐标系下的同名点;R(φ,ω,κ)为旋转矩阵。
2.3.2 三维建模
利用三维激光扫描仪相配套的预处理软件,对各个测站进行拟合标靶球进行整体平差处理,完成点云数据注册工作。由于在数据补充过程中产生冗余数据,影响三维建模质量,需要对点云数据进行减少噪声操作。将外业采集的点云数据经过配准转换的统一坐标系后,存在大量重复的点云数据,进而影响到后期进行的曲面重构的效率和质量,以及对数据进行分析处理的准确性,因此需要在精细建模之前对数据进行统一采样,采样点间距小于2 mm。
点云数据去噪处理完成后,建立墓室的TIN模型。本研究根据实际的点云数据量来构建TIN,将单块三角形数量在2 000~3 500万之内。由于扫描数据的不完整性,在建模过程中难免会出现空洞,所以需进行补洞。在补洞的过程中使用曲面来进行填充,根据实际情况需要进行搭桥等相关操作,根据纹理照片使补洞在最大程度上保留原状。最终整体合并后三角形数量为7 000万,合并完成处理后的模型如图3所示。
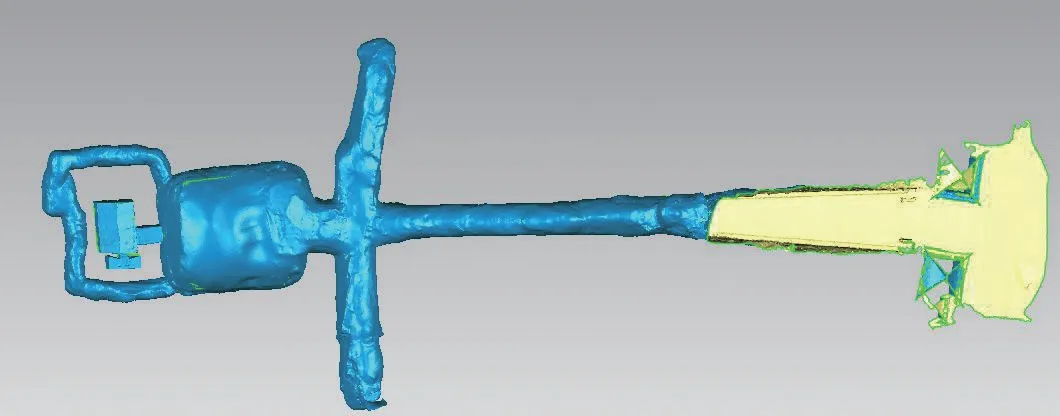
图3 中山靖王墓整体三角网模型

图5 中山靖王墓主室
3 结语
通过本次研究表明,三维激光扫描技术是目前进行靖王墓三维测绘的最佳手段,在靖王墓的保护修复过程中实施三维扫描,具有重要意义。
2.3.3 纹理贴图
将建好的三维模型进行简化处理,确保每一块简化后的三角形个数在50万以内。将模型进行平面展开,选取模型对应位置处的照片通过展UV的方法进行纹理贴图,并进行优化。首先,在低分辨率模型和数码照片上分别选定同名点,依上述纹理映射原理计算所得的结果误差较小,且可利用多余同名点进行联合平差,以真实尺寸的低分辨率模型为基础,将真实色彩的高清晰数码照片通过纹理映射于该模型之上,即获得真实尺寸的纹理模型;其次,以真实尺寸的模型为基础,将真实色彩的高清晰数码照片通过纹理映射于该模型之上,即获得真实尺寸的三维彩色模型。最终成果图如图4~5所示。

图4 中山靖王墓南耳室
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
收藏与投资(2022年5期)2022-05-31
房地产导刊(2021年12期)2021-12-31
小天使·五年级语数英综合(2019年5期)2019-06-27
模具制造(2019年3期)2019-06-06
小学生学习指导(爆笑校园)(2019年4期)2019-04-17
动漫星空(兴趣百科)(2018年6期)2018-10-25
新民周刊(2017年37期)2017-09-25
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
