EBZ75 型掘进机截割部液压系统设计及仿真分析
2022-03-09 01:50王吉平王力邓阳泰
科学技术创新 2022年4期
王吉平 王力 邓阳泰
(南京理工大学紫金学院,江苏 南京 210046)
掘进机是集机、电、液系统于一体,针对隧道、巷道掘进工况所开发的一种经济、高效的掘进设备。该设备同时具备截割和搬运功能,相比于其他的掘进设备,掘进机具有较高的机动性、所需工作空间较小、具有较高自动化程度等特点,被广泛应用于煤炭巷道的掘进工作和不便于大型设备进入隧道掘进的复杂工况。
掘进机总体结构由水系统、截割部、液压系统、本体部、铲板部、行走部、后支撑、润滑系统、电气系统、一运部组成。在掘进机的机、电、液系统中,液压系统担任着传动的角色,液压系统工作的稳定与否直接关系到整个设备的运行是否顺利。该液压系统直接与截割头相关联,保证截割动作的准确性和稳定性。在掘进的过程中经常会碰到多样的岩层状况,从而导致截割时所受到的作用力发生突变,该种载荷的突变引起截割部液压系统的抖动甚至失效。为了解决或减少这种不稳定因素,就要对液压系统进行合理的设计。
本文以EBZ75 型掘进机为研究对象,对该种掘进的截割部液压系统进行研究分析。尝试采用逆向的方式,对该液压系统进行设计。以求更深入的了解各液压元件在液压系统中起到的作用,以及如何利用各种液压回路保证液压系统的工作稳定性。为日后更专业的研究和探讨打下来良好的基础。
1 截割部液压系统的设计
1.1 截割部结构及工作情况介绍
EBZ75 截割部内部构造包括截割头、伸缩部、截割机构和电机。截割头通过伸缩部和伸缩液压缸与截割臂相连。截割臂与掘进机机身通过升降液压缸连接。在工作时,升降液压缸驱动截割臂上下活动,其活动范围最高为3500mm,卧底量为200mm。截割头由额定功率为75kw的电机以46r/min 的速度驱动,其关联二级减速器总减速比为31.978,输出扭矩为13537N·m。采用圆锥台形截割头,伸缩部伸缩行程为400mm。
1.2 截割部伸缩液压缸受力分析
已知截割头重量m 小于等于500kg,截割臂摆角范围为-29.2°~38.1°。液压缸受力为:Q=mgsinφ=5000sinφ
式中:Q为液压缸所受到的正压力N;
G为截割头的重力N;
φ 为截割臂俯仰角度。
其结果中,正号为对液压缸的压力,负号为对液压缸的拉力。根据计算,可知伸缩液压缸最大载荷为3085.18N。
1.3 截割部升降液压缸受力分析
1.3.1 推导相关参数方程
参考现有EBZ75 相关说明书与图纸,设计截割部相关初步尺寸。为了提高数据的直观性,最后结果以标量形式呈现。液压缸所受载荷力大小关系式为:

在此式中除μ、θ 两个变量外,其余全部为已知量,如表1所示。

表1 计算所需的相关参数值
则下面需要推导出该组变量之间的函数关系式。以便求解外力Q与截割臂俯仰角φ 之间的关系。
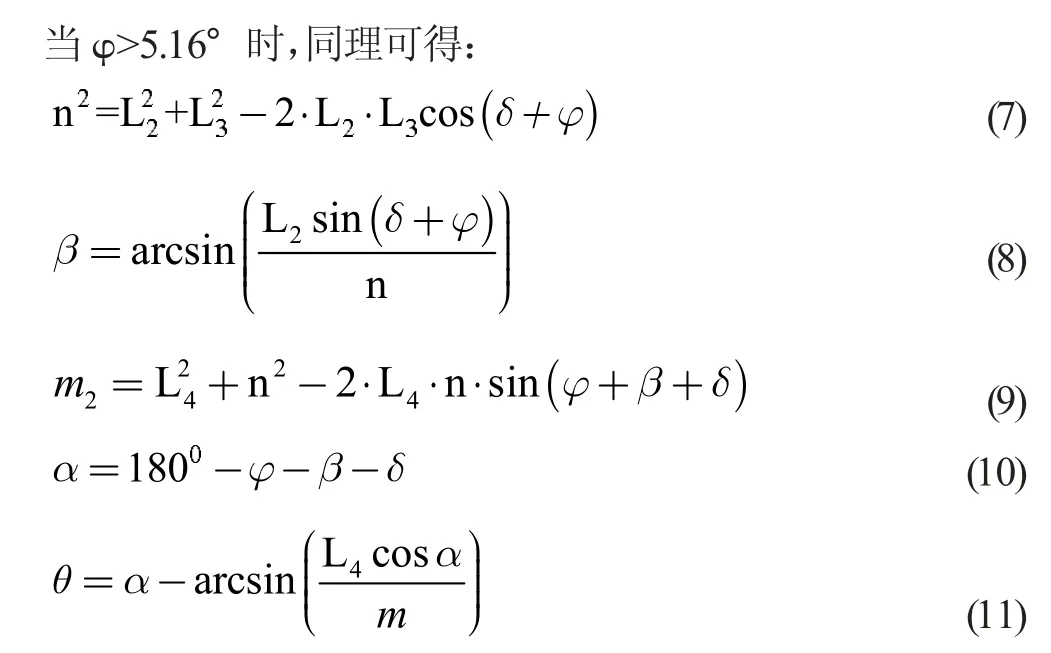
联立式(2)~式(11),可求解出φ、θ 的关系式,将此关系式带入式(1)中,可获得正压力Q 与截割臂俯仰角φ 之间的关系,从而求解液压缸上的负载载荷。
1.3.2 利用MATLAB进行结果计算与验证
在联立式(2)~式(11)求解方程组中,存在超越方程。为了求解该方程组,本文利用MATLAB软件进行求解计算。
为了进一步确定所计算结果,需要对所列方程式进行验证。首先,关于关系的验证,可以通过取随机点计算结果与作图法测量结果进行比对,从而验证关系式的正确性。通过拜读相关学者的学术研究,亦可发现最后受力情况整体趋势亦为吻合的。如学者王焱金对EBZ120 型掘进机截割部受力情况的研究过程中,得出截割臂在最底端时受力最大的结果,与本文所得出的结果相近。验证了力学关系式的正确性。
1.4 截割部液压系统的设计及选型
1.4.1 液压回路的设计
截割部液压系统的执行元件会受到重力的影响。在重力的作用下,截割部液压缸驱动腔,存在突然失压的现象,从而导致截割臂或截割头的突然滑动。为了抵消重力带来的负面结果,需要设计平衡回路。同时,该回路还应该具备液压缸运行方向改变的功能。
1.4.2 泵的选型
液压泵作为液压系统的能源装置,负责提供液压回路中所需的油液。在实际选择液压泵的时候,不但要考虑液压系统工作的最大压力,所需流量等理论参数,还需要考虑液压泵工作的环境,价格,品控、稳定性等其他附加因素。故最为合适本文所叙述的工况使用的泵是内啮合齿轮泵。型号为CBG1025 主要参数如表2 所示。

表2 CBG1025 主要参数
1.4.3 平衡阀的选型
平衡阀属于负载控制阀的一种,平衡阀具有单向低的液体流动阻力、负载保持功能、溢流功能以及节流功能。根据本文的设计实际情况,平衡阀可选用意大利Fluid Press 企业所生产的FPO-35-D-1/4 型号双向平衡阀,此阀为非卸荷型,其安装方式为插装式,主要参数如表3 所示。
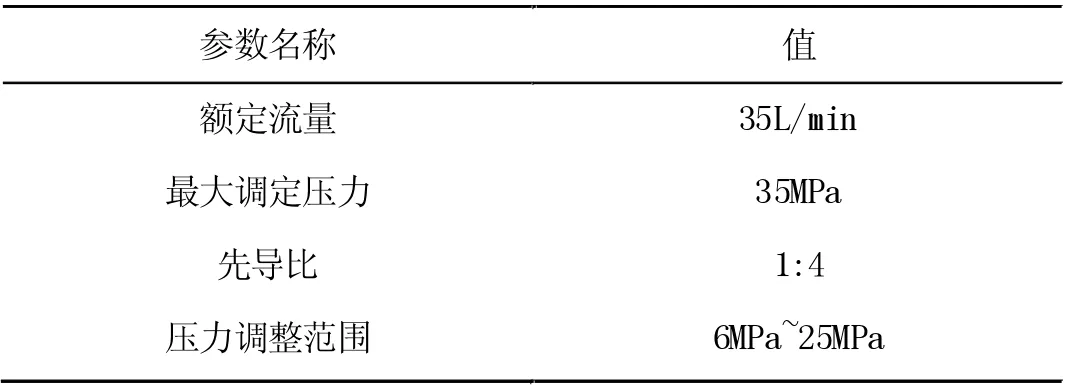
表3 FPO-35 型平衡阀主要参数
1.4.4 换向阀的选型
换向阀在液压回路中起到变换液压缸行进方向。根据回路的特征选用四位三通换向阀。同时,在不工作的状态下,即液压缸锁止的情况下,为了避免液压缸驱动腔中封闭的压力导致平衡阀开启,从而引发液压缸发生不需要的下滑的状况。应将驱动腔,在不工作的情况下进行卸荷。所以四位三通换向阀中位应选用Y型或者H 型。对于一般工况,出于成本考虑,可采用手动换向阀,阀芯为滑阀。综合考虑,选择力乐士H4WMM22M型手动换向阀,如果后续需要升级,比如需要无人驾驶,远程控制的情况下,亦可以考虑同规格的电磁换向阀。
1.4.5 液压缸的选型
在截割部分,共有2 套液压缸,一套是用于举升截割臂的升降液压缸,一套用于截割头伸缩的伸缩液压缸。两种液压缸均为单作用活塞液压缸,且属于非标准件。需要依照工况进行设计。
在设计的时候,缸径、形成应该优先满足GB/T 2349-1980推荐的尺寸进行设计。液压缸结构形式均为法兰型液压缸。与外部连接方式为铰接。除此之外,还应该考虑一定的冲击载荷。需要设置一些缓冲装置,缓解冲击载荷对液压缸结构的破坏。同时考虑到智能化的升级需要,亦可以在液压缸内置磁环,以配合电控系统相关传感器使用。
1.4.6 油箱的选型
油箱在液压回路中主要起到储存油液、散热以及分离油液中杂质的作用。掘进机所处环境为一般工况,所以采用常见的分离开式油箱即可。油箱的容量可根据经验公式计算可得:v=ξqp=6×50=300L,该数值是截割部液压系统所需的容积,并不代表掘进机整体液压系统所需的容积,故满足截割部所用油箱容积为300L。
1.4.7 管路的选型
管路采用带有快速矿用接头(KJR)的高压胶管。根据相关计算,可选压油管径为22mm,吸油管路为32mm。
1.4.8 其他元件选型
根据系统最大压力7.5MPa,最大流量50L/min,确定其他元件参数,见表4。

表4 元件型号
2 截割部液压系统的仿真分析
2.1 基于AMESim的截割部液压模型建立
在进行液压系统仿真前,必须对液压系统进行模型的建立。根据前文所示的液压系统原理图,利用AMESim软件组建所需液压系统的草图。将各元素通过线连接,当软件中无色块警告出现,表明所有元件已正确连接,即成功构成所需的液压系统草图模型。
在完成草图模型的构建后,需要确认相应的模型的子模型是否正确。在本次草图模型中,大部分子模型使用默认设置即可,只有少部分需要更换默认选择。在选择完对应的子模型后,需要对模型元件设置对应的参数。根据已知参数和前文所推导出的参数,可以总结出如表5 所示的重要参数。依据表5 中参数,对模型草图中各元件进行设置:将定量泵的排量设置为25ml/r;三位四通换向阀最大流量设置为50L/min;液压缸内径,行程,伸缩杆直径分别设置为160,550,90;负载质量设置为116KN;溢流阀调定压力为80bar;平衡阀设定压力为75bar。
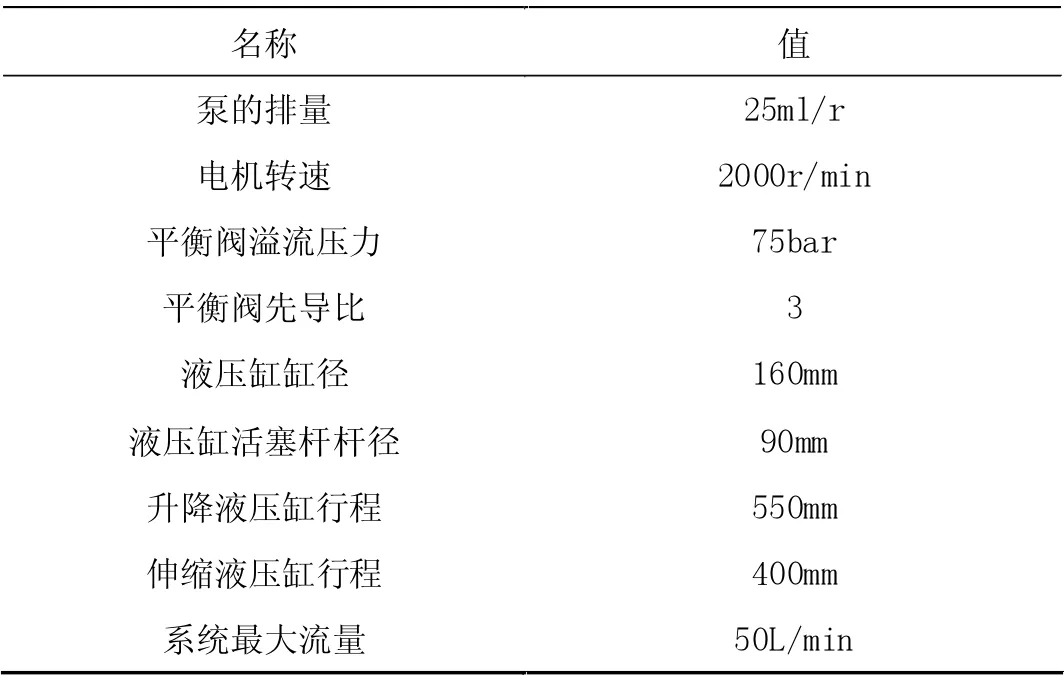
表5 仿真所需设的相关参数
2.2 截割部油缸动作仿真
本文设计所设计的液压系统旨在完成截割部升降油缸的升降动作,以及伸缩油缸的伸缩动作。所以仿真的第一项任务即为对液压系统是否能完成规定动作进行仿真。
在完成换向阀的信号输入后,仿真时间设置为50s,采集频率为10Hz,开始仿真。得到各液压缸负载质量块的位移曲线图如图1 所示。图中可以明显看出,两组液压缸负载质量块位移曲线符合预期设置。即升降液压缸在0~30s 之内伸出,伸缩液压缸在40~45s 之内伸出。且位移速度均匀,证明平衡阀发挥了保持运动平稳的作用。
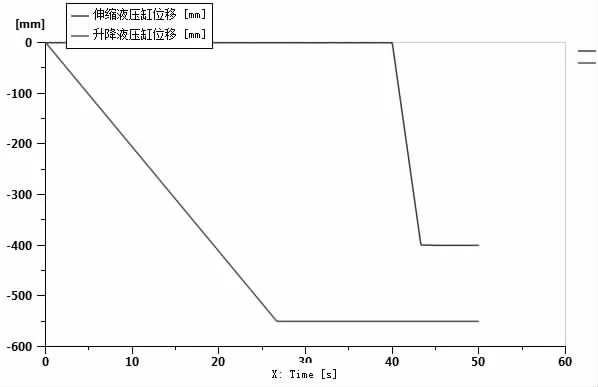
图1 负载质量块位移图
2.3 冲击溢流仿真
平衡阀不但具有保持油缸运动稳定的作用,还可以在油缸受到突然的冲击时发生溢流,以保护液压系统免受破坏。观察平衡阀内部的流量曲线图2,可以明显看出在30~40s 之间有明显的溢流。由此证明平衡阀工作正常,具备溢流功能。

图2 平衡阀流量图
2.4 换向阀作用仿真
换向阀在液压系统中起到油路流向变更的作用,从而带动执行元件的换向。读取液压缸负载质量块的位移曲线图3,可以看出,执行元件液压缸按换向阀预计指令完成伸缩动作。并且位移变换均匀,平衡阀工作正常。

图3 质量块位移曲线图
3 结论
本文基于EBZ75 型掘进机截割部液压系统展开了讨论与研究。采用理论分析、仿真分析以及设计分析的手法,对掘进机截割部液压系统进行了较为完整的设计与研究。所得结果如下:a.通过力学模型的求解,得出截割部负载曲线变化图。b.完成设计掘进机截割部液压系统,并绘制原理图,以及相关元件的选型。c.利用AMESim软件对所设计的液压系统进行了仿真,验证了液压系统运行的可行性,以及平衡阀所具有的保持运动稳定以及过载溢流特性。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
露天采矿技术(2021年1期)2021-03-07
隧道建设(中英文)(2021年11期)2021-01-16
装备制造技术(2019年8期)2019-10-23
汽车文摘(2017年2期)2017-12-04
凿岩机械气动工具(2017年2期)2017-07-19
中国科技纵横(2016年14期)2016-10-10
电子制作(2016年19期)2016-08-24
凿岩机械气动工具(2015年3期)2015-11-11
凿岩机械气动工具(2015年3期)2015-11-11