
穴盘苗高速移栽机器人研发
2022-03-06 05:33陶玉龙王兆坤
农业装备技术 2022年1期
陶玉龙,潘 婷,潘 昱,曹 昕,王兆坤
(扬州大学 机械工程学院,江苏 扬州 225000)
0 引 言
作为机械化穴盘育苗技术中的重要环节,移栽具有非常显著的特点,不仅对气候具有补偿作用,还能促进作物提早生育,具有非常重要的综合效益。可以充分利用光热资源,能够获得很好经济效益的同时,也具有非常客观的社会效益。一直以来,作为劳动密集型作业,蔬菜种植的成本中,劳动力成本占据到一半以上[1-2]。超过六成的蔬菜品种,种植方式都是依赖于育苗移栽。秧苗手工栽植过程,需要反复的弯腰和肢体屈伸,劳动强度非常高,仅次于收获作业。因此,如果能够利用现代先进技术,实现移栽作业自动化,就能为温室栽培规模的扩大,提供必要的基础,促进生产效率的提高。
我国发展现状:穴盘苗移栽技术处于半自动栽苗水平,研发结构较为简单、功能精良,而实现穴盘苗全自动移裁的关键是适于当地育苗生产的取苗装置的研发[3]。当前,实际能投入到生产应用的自动移栽机相对较少,究其原因,主要是机构设计中取苗爪与钵体作用规律不清,穴盘苗的生物力学特性数据匮乏,机构设计与育苗工艺无法结合,这些都严重制约着自动移栽机的发展。
国外发展现状:在温室穴盘苗移栽机器人方面,国外主要研究了移栽机器人的机器视觉识别系统、末端执行器机械结构以及移栽机整体控制方式。
世界各国基本都没有高效、高速移栽机器人,因此移栽机械化这块领域,仍是未来农机机械化和现代化的发展重点区域之一[4]。
1 主要研究内容
(1)研究目标
利用现代先进技术实现移栽作业的自动化,实现移栽机器人的研发应用,大大改善劳动作业条件。
(2)主要内容
前期:①搜寻理论模型,并用SolidWorks 初步建模;②设计图像收集系统,建立机器视觉系统,实现与CCD(电荷藕合器件图像传感器)摄像头通信功能,捕获穴盘图像并实时记录;③研究穴盘幼苗叶片特征参数检测方法; ④研究适合移栽的穴盘幼苗的识别算法。
中期:⑤建立移栽系统,实现上位机与PLC(可编程逻辑控制器)相互的通信功能;⑥研究机械手移栽路径规划;⑦设计合理的末端执行器。
后期:⑧开发基于VC++的穴盘苗自动移栽软件平台:静态分析部分和动态移栽部分;⑨实现移栽机器人实时检测自动移栽功能。
最后,完成实践测试以及相关论文的撰写。
(3)拟解决的问题
移栽机器播种工作不稳定,运行轨迹与预期有偏差等。
2 创新特色
本项目提出智能、高速的移栽形式,设计了一种高速移栽的智能机器人,可完善传统移栽技术有关方面的缺陷,提高移栽技术的效率,有利于推动农业机械化的进程。
3 主要研究方法
项目研究方法:采用理论到实践的方法,先合作进行产品的三维创作,再进行理论分析。首先进行图像的获取,再进行图像校正,包括穴盘检测、倾斜校正、区域识别,然后进行健康识别,选出健康的幼苗,最后进行移栽优化,识别出最优化的路径,达到高速的目标。
4 移栽机器人研发
4.1 并联机器人设计
以40 日龄黄瓜穴盘苗为例,根据移栽对象,结合其移栽轨迹的需求,在高度方向移栽距离的设置上,要高于穴盘苗高度(1 200 mm),以实现安全取苗的目的[5]。从而,将移栽轨迹的高度设为1 300 mm。再结合穴盘的实际规格,将宽度跨度设置为4 800 mm,相应的对角最大距离,设置为6 000 mm。此外,还考虑输送装置的间隔距离,并联机器人的移栽工作空间设置为6 000 mm×4 800 mm×1 300 mm,由3条支链组进行固定。

图1 3 支链并联机器人
4.2 输送装置设计
在本次移栽的过程中,要将苗从128 孔穴盘向72 孔穴盘进行移栽。而自动化作业的开展,建立在配套输送装置完善的基础上,需要配合并联移栽机器人,开展相应的穴盘运输移动[6]。为了实现上述作业,需要设计两条输送带进行配合:一条输送带,用来负责将黄瓜苗从128 孔穴盘,向并联机器人的移栽区域进行输送。在移栽作业完成后,负责将空置的穴盘,向收集处进行输送。另外的一条输送带,负责将黄瓜苗从72 孔空穴盘向并联机器人的移栽作业位置进行输送,作业任务完成之后,将移栽后剩下的穴盘,直接向下一步工序的位置进行输送。在这个过程中,还需要注意穴盘推杆的装置,将其准确地在链条上进行定位安装。如此,一旦电机带动链轮转动的时候,安装在链轮上的链条,也会随之进行转动,从而推动穴盘到移栽作业位置。

图2 苗盘输送装置
4.3 整体结构设计
温室并联移栽机器人由框架结构、并联机器人及输送装置三大部件组成,如图3 所示。其中的一条输送装置,在链传动的作用下,对培育好的128 孔穴盘苗进行输送,将其运输到并联移栽机器人的作业区域。并且,还要通过穴盘挡板(安装在链条上)将每个穴盘间隔开来。另一条输送装置,将72 孔空穴盘向并联移栽机器被移栽的作业区域进行移送。在这个位置,等待移栽作业。移栽机器人的驱动电机布置在静平台上,驱动并联移栽机器人的驱动电机,通过PLC 控制末端取苗爪的移栽作业。
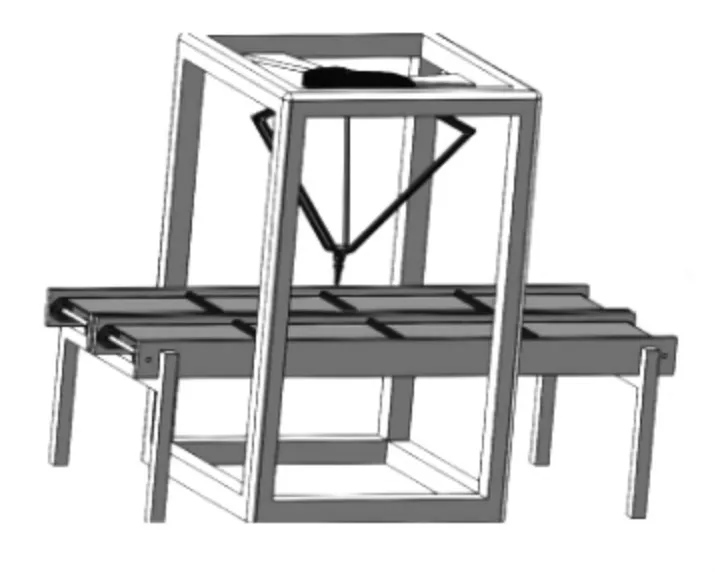
图3 温室并联移载机机器人
5 结 语
机械化穴盘育苗技术,主要是利用穴盘作育苗容器,采用包括草灰、蛙石、珍珠岩等材料在内的轻基质材料作为育苗基质,并在此基础上形成的一种一穴一粒、一次性成苗的现代化育苗方法,具有出苗率高,出苗整齐、出苗快、病虫害少、省工、省时等许多优点。
猜你喜欢
小哥白尼(军事科学)(2022年4期)2022-07-08
电机与控制学报(2018年9期)2018-05-14
Coco薇(2017年10期)2017-10-12
安徽农学通报(2016年23期)2017-04-12
农民致富之友(2016年22期)2017-02-07
江苏农业科学(2016年2期)2016-04-11
中国信息化·学术版(2013年5期)2013-10-09
