月面重力环境效应的地面模拟方法
2022-03-03 05:55:10朱战霞张志昊郑子轩袁建平
载人航天 2022年1期
朱战霞, 张志昊, 孙 冲, 郑子轩, 袁建平
(1.西北工业大学航天学院, 西安 710072; 2.航天飞行动力学技术国家级重点实验室, 西安 710072)
1 引言
月球作为地球的唯一卫星,其特殊的空间位置以及丰富的潜在资源已经引起了全球的关注,建设永久性载人月球基地成为各航天大国的目标之一,如欧空局的月球村计划以及NASA 的Artemis 重返月球计划。 随着嫦娥计划的顺利实施,中国也应尽早开启月球基地建设计划,以开发和利用丰富的月球资源。
月球基地的建设离不开航天员和各类机器人的协同合作,执行月球表面的各种巡视、挖掘、搬运、搭建、维护等任务,为人类向月球的迁徙做好基础设施搭建和服务保障。 航天员月面活动的适应性训练以及各类机器人任务可靠性检验都必须在发射前进行充分的地面试验和测试。 为了获得能够反映月面操作真实效果的试验结果,必须模拟月球环境。 从动力学和运动特性方面考虑,首先需要模拟月面重力环境。 因为地面重力环境与月面重力环境有较大差异,航天员和机器人在不同的重力环境下所表现出的运动特性也存在较大差异,通过地面试验系统等效模拟月面的重力环境,才有可能使航天员和机器人的动作和运动特性与月面重力环境中的等效或一致。
本文旨在对月面重力环境模拟方法进行分析。 首先对空间微重力环境的模拟方法进行阐释,分析其优缺点及应用于月面重力环境模拟的可能性,并对月面操作地面试验的现状及面临的问题进行分析。 在此基础上,介绍一种液磁混合模式的月面重力环境效应模拟方法,并展望其在月面操作活动及相关技术验证中的应用前景。
2 空间微重力环境/效应模拟方法
纵观已有的空间微重力环境/效应模拟方法,主要包括2 类:①环境模拟,即利用重力加速度创造微重力环境,包括自由落体法、抛物线飞行法;②环境效应模拟,即试验件持续受到可以平衡或近似平衡重力的外力,而使视重为零,包括气浮法、悬吊法和液浮法。
2.1 自由落体法
自由落体法利用一定高度差下的自由落体原理进行失重模拟,微重力水平可达10~10(为地面重力加速度),一般可获得5 ~10 s 的微重力时间。 主要设施包括探测火箭和微重力落塔,具有微重力水平高、试验费用低、试验机会多等优点,主要用于科学试验。 但其持续时间很短,只有几秒钟,并不适合于模拟长时间空间运动。
2.2 抛物线飞行法
抛物线飞行法通过飞机俯冲过程中产生短时间类似自由落体的环境模拟微重力状态,主要设施是失重飞机,微重力水平比自由落体法低一些,可达10~10,一次抛物线飞行提供的失重时间比较短,一般只有几十秒到一分钟,也不适合于模拟长时间空间运动。 而且该方法不支持体积庞大的试验系统,目前主要用于航天员的训练和一些科学试验。
2.3 气浮法
气浮法依靠压缩空气形成气膜,使试验件浮起,通过高压气体的作用力平衡物体重力,从而实现微重力效应的模拟,同时可实现近似无摩擦的相对运动。 由于其气膜高度只有毫米级,因此没有垂向自由度,目前大多用于平面相对运动试验和姿态模拟与仿真试验。 近年来,在二维平面气浮的基础上,通过增加垂直方向的无摩擦机构,基于运动合成的机理,也可实现三维空间内的六自由度试验。 但是这种方法无法模拟姿轨耦合效应,很难从动力学本质上对复杂的空间三维运动进行模拟。
2.4 悬吊法
悬吊法利用悬挂重力补偿原理,通过随动控制方法使吊丝保持竖直,采用配重块平衡竖直方向的重力,利用牵引装置实现三维空间的运动,模拟微重力效应。 但是悬吊法基于静态平衡原理,且施加在试验件上的力是一种集中力,而非分布式力,且机构复杂、运动精确性不高,特别是动态情况下微重力模拟水平较低,约为10,应用受到很大限制,目前主要用于配合气浮法进行空间机器人的地面试验。
2.5 液浮法
液浮法是利用液体对试验件的浮力平衡重力,使试验件在液体中处于悬浮状态(也称中性浮力状态),以模拟微重力效应,主要设施是中性浮力水池。 中性浮力水池容积可以很大,可供大型试验件六自由度长时间、无限制地连续运动测试。 但中性浮力法的微重力模拟水平受试验件特性(体积和质量)的影响,浮力重力配平精度较低,且每一对象都必须经过复杂繁琐的线下配平,无法通过环境力进行在线自主配平和调控,因此使应用范围受限。 目前主要用于航天员训练和有航天员参加的接触性空间操作活动的训练。
以上方法和设施各有特点,虽然可用于不同试验目的下的微重力环境/效应模拟,但是并非完全适用于深空探测的星体表面重力效应的模拟。抛物线法和自由落体法都只能实现一种且仅仅一种状态,即失重的状态,无法实现低重力状态;气浮法的原理导致了一旦物体被浮起,则气体压力完全平衡物体重力,难以满足低重力模拟要求。因此,以上3 种方法不适合星体表面重力的模拟。悬吊法中丝绳的拉力可人为控制,液浮系统中试验件浮力是其体积的函数,都可以通过合理设计实现试验件部分重力被平衡,从原理上讲,可用于星体表面重力效应的模拟。
3 星体表面机器人操作的地面试验现状
目前星体表面机器人操作的地面试验和研究,针对不同试验目的,大致可以分为星体表面地貌特征模拟环境下的机器人运动性能试验与星体表面重力模拟环境下的机器人运动和操作试验。
3.1 星体表面地貌特征模拟
星体表面地貌特征模拟环境下的机器人运动性能试验大多模拟火星或月球的地形地貌特征。例如美国LRV 月面巡视车地面试验(图1)、约翰逊中心的月球地貌试验场(图2)、 JPL 的MarsYard 火星地形试验场(图3)等。 以上试验可以验证部分技术,如目标识别、导航、移动、避障、遥操作等,但由于忽略了星球重力特征的模拟,无法有效验证星球重力环境下机器人的运动特性和操控性能。

图1 美国LRV 月面巡视车的地面试验[8]Fig.1 Ground test of American LRV lunar rover[8]

图2 约翰逊中心的月球地貌试验场[8]Fig. 2 Johnson center’s lunar geomorphology proving ground[8]

图3 JPL 的MarsYard 火星地形试验场[8]Fig.3 JPL’s Mars yard[8]
3.2 星体表面重力模拟
对于星体表面重力模拟环境下的机器人运动和操作试验,较常用的是悬吊法。 悬吊法通过吊丝拉力在垂直方向平衡试验对象部分重力,就可以模拟星体表面的重力效应。 例如美国兰利研究中心的门型框架低重力模拟器(图4)、马歇尔航天飞行中心的月球重力模拟器(图5)、哈尔滨工业大学的星球车重力补偿系统(图6)。

图4 门型框架重力模拟器[10]Fig.4 Gravity simulator of portal frame[10]
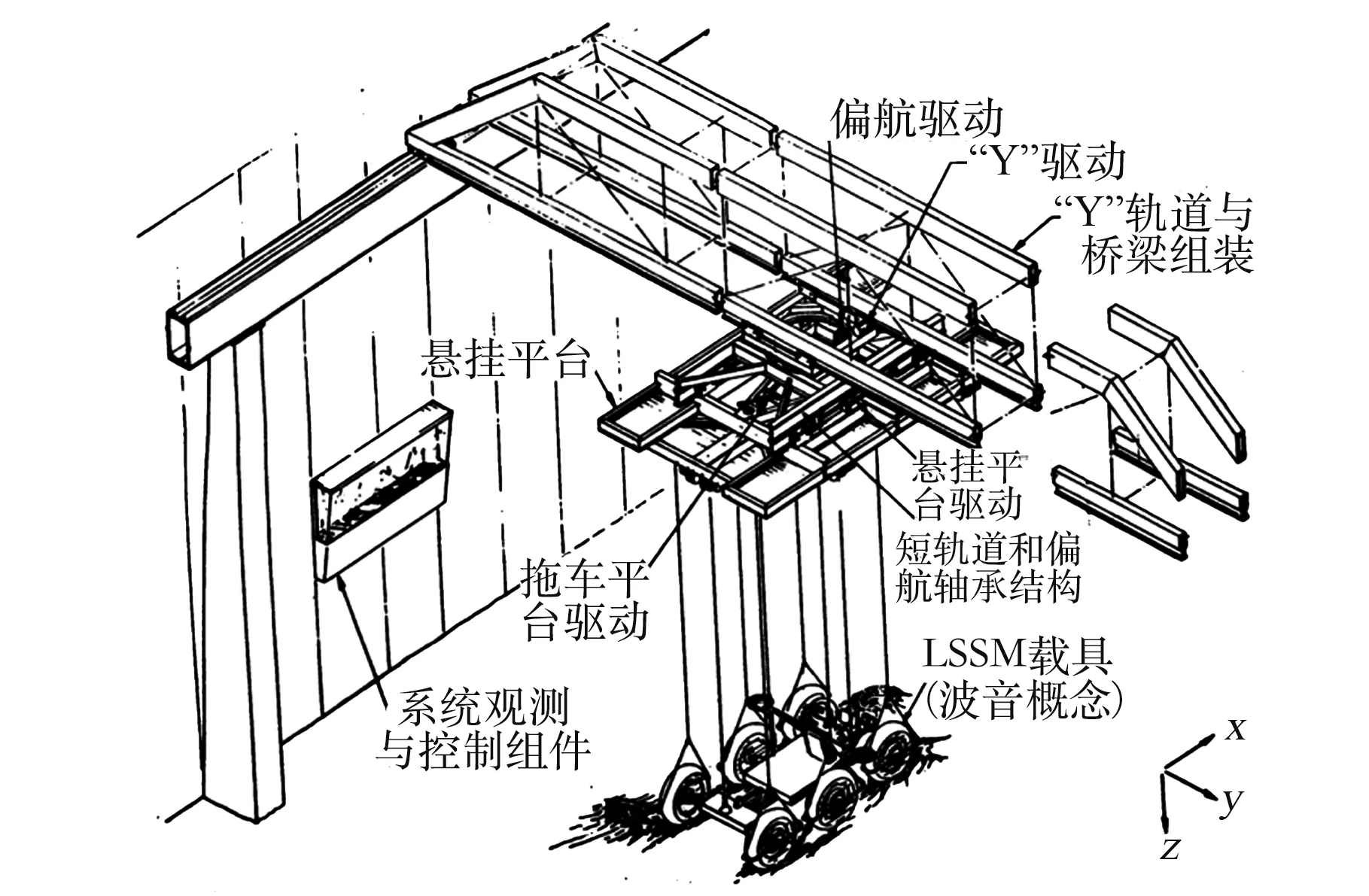
图5 月球重力模拟器[11]Fig.5 Lunar gravity simulator[11]

图6 星球车重力补偿系统[12]Fig.6 Gravity compensation system of planetary vehicle[12]
悬吊法可以实现不受时间限制的低重力效应模拟,在一定空间范围内进行机器人运动和操作的研究与试验。 例如,机器人的运动分析与试验、月球车行走系统性能试验、月面巡视器的控制试验、月壤采样相关技术研究与试验、月球车的车轮与月壤之间的动力学试验、月球着陆器着陆性能研究与试验、视觉位姿测量技术与试验等。 但是悬吊系统属于集中力系,失真度大,结构机构非常复杂,控制系统的设计与实现难度非常大。 虽然已有一些针对悬吊系统设计、重力补偿以及测控技术的研究,解决了应用中的部分技术问题,但针对星体表面的大范围运动和机器人机械臂高精度复杂操作活动的地面试验,悬吊法结构布设非常复杂,且有可能存在丝线阻挡/缠绕等问题,因此仍然面临巨大的技术挑战。
液浮法也可以用于星体表面重力效应的模拟,对于月球来说,通过液体浮力平衡被试验对象5/6 的重力,就可以模拟月球表面重力效应,一般通过合理设计试验对象的排水体积和自身重量来实现。 但是由于液浮法的模拟精度低,配平过程复杂,无法在线自主配平,虽然在微重力模拟和试验中有大量应用,但目前甚少见其在星体表面操作试验中的应用。
4 液磁混合悬浮方法及月面重力效应模拟
4.1 液磁混合悬浮方法
针对液浮法的不足,朱战霞等提出了一种液磁混合悬浮方法,用于精确模拟微重力效应。其原理是基于液体浮力,并结合非接触电磁力特性,形成合力共同作用于试验对象上。 通过液体浮力宏观调整微重力水平,通过可控电磁力实现微重力水平的微观精确控制,如图7 所示。
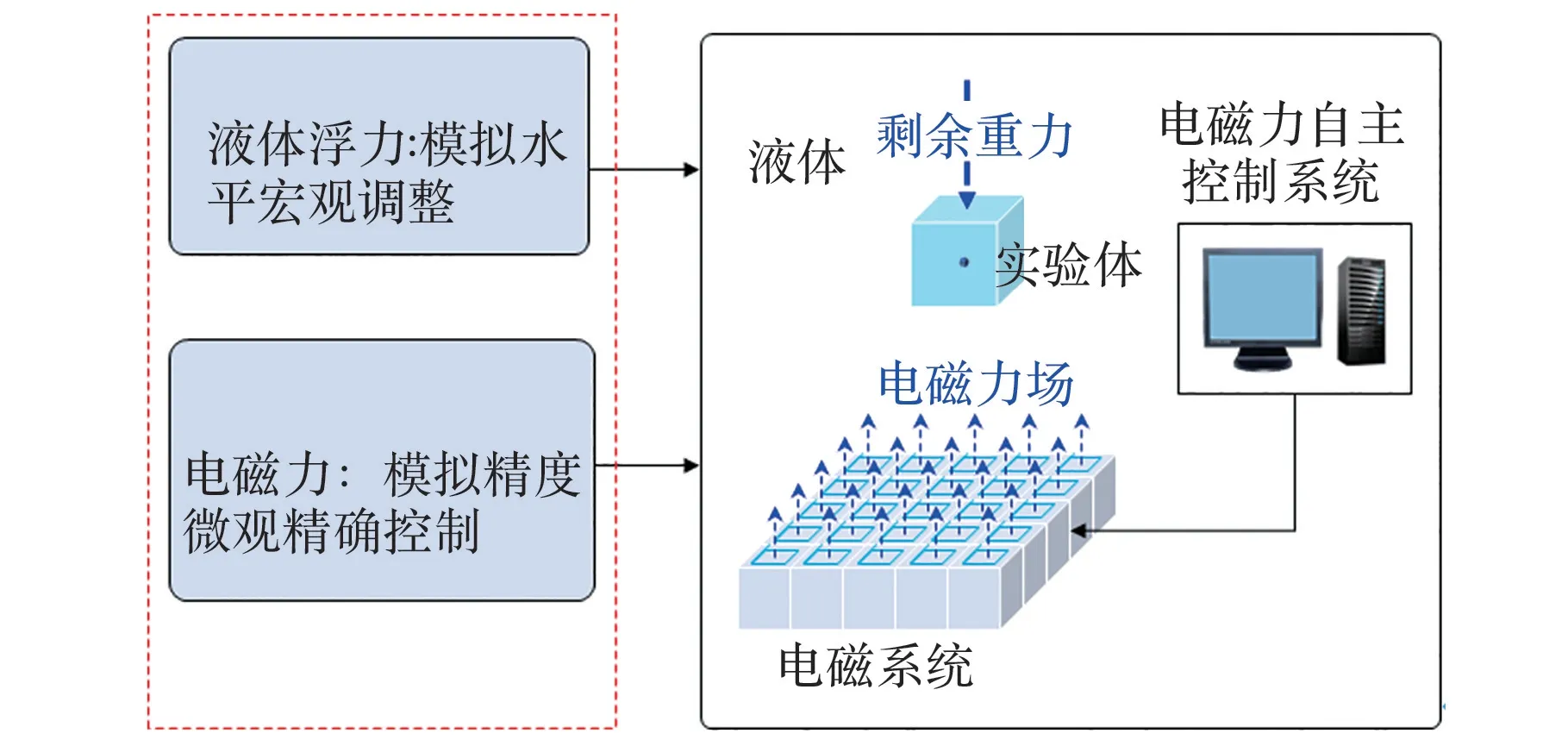
图7 液磁混合悬浮原理图Fig. 7 Schematic diagram of liquid magnetic hybrid suspension
液磁混合悬浮法保留了纯液浮方法的优点,即长时间、大空间、三维、真实自由度的模拟,同时通过引入可控电磁力弥补了其不足(重力配平过程复杂,存在重力浮力差即剩余重力,配平精度严重依赖人员经验,配平后微重力水平不可调节和控制)。 该方法更进一步有效结合了液体浮力和电磁力的优点,并弥补了各自的不足,是一种宏观尺度浮力生成和微观尺度电磁力调控的有机结合。 一方面通过电磁力弥补中性浮力不可精确调控的不足,另一方面通过液体浮力弥补电磁力不具有大范围/大尺度调控能力的不足,可实现微重力模拟水平的大范围高精度调控。
基于此方法的地面微重力试验系统,涉及微重力水平精确模拟、电磁力生成与控制、电磁环境下试验方法、水动力补偿等关键技术。 基本组成包括液浮系统、电磁系统、试验平台系统、视觉测量系统、试验操作与数据处理系统(图8)。其中,液浮系统是一个水池,试验件处于其中受到浮力作用;电磁系统分布于水池的上方,提供所需的电磁力,用于精确调控微重力模拟精度和水平;试验平台可以搭载需要测试的试验对象;控制系统主要用于试验过程中环境干扰(水动力干扰)的自主补偿控制;测量系统由布设于试验环境中的工业用视觉相机,图像处理系统和数据融合系统组成,用于对试件的位置、速度、姿态等运动参数进行测量;试验操作与数据处理系统用于对试验过程进行在线操控,对试验数据进行分析和处理。 目前已经建成的地面微重力试验设施,其微重力模拟精度水平相对于纯液浮系统提高了2 个量级,电磁力控制精度优于1%,水动力干扰自主补偿精度优于1%,可提供大尺度、全维度、长时间、高逼真、高精度、可控微重力效应模拟水平的试验环境,可实现与空间同步操作演示。

图8 试验系统组成图Fig.8 Composition diagram of the experimental system
4.2 基于液磁混合悬浮法的月面重力效应模拟
在未来的月面基地建设中,航天员和机器人的月面行走和操作将成为日常,相应的地面训练和操作试验也成为必然。 考虑月面环境的特殊性,例如松软月壤、特殊地形、低重力等,必须在地面搭建相似的试验环境,以确保地面训练和试验结果的有效性。
特殊地形的搭建和模拟相对容易,通过对月面土壤和岩石的研究,得出其组成成分,就可以生产出与该组成成分相似的物质。 再结合地形地貌模拟方法,可以实现月壤和月面地形地貌的模拟。
由于月球重力是地球重力的1/6,航天员和机器人行走运动的感觉与地球完全不同,如何模拟月球重力环境下人/机器人的运动特性以及运动过程中与月面相互作用的力学特性仍旧是一个难题。 从液磁混合悬浮微重力效应模拟方法的基本原理看,将其扩展于月面重力效应模拟完全可行。 不同之处只在于通过液体浮力宏观调整重力水平的不同,需要利用浮力平衡约5/6 的重力。在此基础上,通过电磁力进行浮力重力差的精确调整和控制,使其与月面重力大小相同。 该方法将面力(浮力)和场力(电磁力)同时引入,相对于悬吊法的点集中力,向作用于质量微元的月面重力特性更近了一步。 基于以上思想,则可实现月面重力效应的模拟。 特别是通过粗调液体浮力平衡重力的多少,可实现大范围内的变重力模拟,例如微重力、月球重力、火星重力等。 同时采用与微重力试验相似的试验方法和电磁力控制、水动力干扰补偿等技术,可实现模拟精度的提高,例如,若基于纯液浮方法的月面重力模拟精度为10(为月面重力加速度),而通过电磁力的精确控制,基于液磁混合悬浮方法的月面重力模拟精度可提高到10,即可提高2 个量级。
当然,由于液体环境和电磁场环境以及重力场环境的同时存在,使得试验件受力特性复杂,并存在耦合,如何在这样的力场环境中实现人/机器人操作的等效模拟,需要进一步研究和解决。
4.3 液磁混合悬浮法在月面操作试验中的应用
利用液磁混合悬浮法可以等效模拟月面重力环境效应。 在此基础上,若在液浮系统的底部铺设模拟月面高低起伏的地形板,则可实现月面特殊地形、低重力环境特性的同时模拟,为人/机器人的月面行走和操作的地面训练和月面有效载荷相关试验提供等效模拟环境。
基于目前人类对月球的有限认知和现有的航天技术水平,月球基地的建设过程将较为复杂,建设周期也较长。 按照建造阶段的不同,月球基地的建设要经历无人月球基地和载人月球基地阶段,因此,所涉及的操作包括机器人月面操作和航天员月面操作。 机器人月面操作包括了月面巡视、挖掘、搬运、搭建、维修等。 航天员的月面操作活动包括出舱活动、无压和加压下漫游、固定的栖息地建设、基本支持系统建设(如发电厂)等。 图9 所示是NASA 针对Artemis 计划设想的一系列的月面硬件建设和对应的操作活动。

图9 Artemis 的月面硬件建设和操作[29]Fig. 9 Construction and operation of Artemis lunar hardware[29]
对于未来月球基地建设所涉及的操作,利用液磁混合悬浮方法所模拟的月面环境特征,可以进行下列试验和训练:
1)航天员月面操作适应性训练。 基于液磁混合悬浮法的月面环境特征模拟系统特别适合于航天员进行各种操作训练和适应性训练,有利于航天员掌握和熟悉月面重力环境下行走和动作的协调性。 包括训练一般操作能力、进出舱活动,着重于月面行走、奔跑、跳跃步态训练,以掌握精确调节人体运行能力;训练航天员执行复杂操作的能力,例如零件组装、机器人维修等精细复杂操作活动,以掌握精细操作过程中的人体协调控制技巧。
2)各类机械臂月面操作模拟试验与训练。机器人执行月面挖掘、搬运、搭建、维修等任务时,离不开多自由度灵巧操作机械臂的协助。 机械臂的相关技术和性能需要在等效月面环境下进行试验和测试。 基于液磁混合悬浮法模拟的月面重力等效环境,不仅可使机械臂整体及各关节都处于1/6 重力作用下,而且使被操作对象(月面挖掘的月岩、月面搬运的材料、月面建造的结构)也处于1/6 重力作用下,同时是一种三维同自由度同步操作的试验环境,因此非常适用于机械臂的等效操作测试和试验,包括机械臂的机械运动构件性能、运动系统性能、规划控制性能的测试与试验;机械臂设计参数合理性检验和校正;面向任务的操作效果和操作流程检验和操作适应性训练等。
3)人-机月面协调操作模拟训练。 月面基地建设过程中,需要航天员和机器人相互配合完成特定任务。 基于液磁混合悬浮法模拟的月面等效环境,可以根据需要建设得足够大,允许多名航天员和多个机器人同时进行测试与试验,包括航天员之间的配合训练与检验、机器人之间、航天员-机器人之间的协调操作训练和测试、面向复杂任务的人机协同操作策略制定和规划能力检验等。
4)月面有效载荷相关试验。 月球探测活动涉及到各种有效载荷,包括技术验证载荷和科学探测载荷。 基于液磁混合悬浮法构建的月面重力效应模拟环境,可以为有效载荷功能设计的合理性提供测试和试验环境,例如载荷自身机构功能、搭载平台功能、多个载荷之间的配合、搭载平台对有效载荷功能性能的影响、月面地貌状态对载荷功能性能的影响等。 同时,可为有效载荷任务设计合理性与工作程序优化设计提供地面测试环境,包括月面地貌状态设定、任务阶段划分、工作模式设计、工作程序优化等。
5 结论
为满足月面操作地面等效试验的要求,需要建设月面重力环境的等效模拟设施。 纵观传统空间微重力环境/效应模拟方法,从原理上只有悬吊法和液浮法适合扩展到月面重力环境效应模拟。悬吊法已有较多应用,然而针对人/机器人月面大范围空间内的复杂操作活动地面试验,仍面临巨大的技术挑战。 液浮法存在模拟精度低、配平过程复杂等不足,目前甚少见其在星体表面重力模拟试验中的应用。
考虑到液磁混合悬浮方法不仅具有液浮法大尺度、全维度、长时间、可同步的优势,而且可控电磁力的引入增加了高逼真、高精度、可调控的特点,为此,针对人/机器人月面大范围空间内的复杂操作活动地面试验,建议基于液磁混合悬浮法进行月面重力环境效应的模拟,并建设相关试验设施,以期为机器人月面操作活动地面测试和试验、航天员月面操作训练、人/机协同操作训练、月球探测活动和月球基地建设等提供新型等效地面试验方法和试验平台。
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
数学物理学报(2021年5期)2021-11-19 07:00:58
数学物理学报(2019年5期)2019-11-29 07:46:24
小学科学(2019年9期)2019-10-18 09:33:23
物理教师(2015年8期)2015-07-25 08:03:04
太空探索(2015年1期)2015-07-18 11:02:13
少儿科学周刊·儿童版(2015年2期)2015-07-07 03:37:26
太空探索(2014年12期)2014-07-12 15:17:12