
城市轨道交通直流自耦变压器牵引供电系统故障保护研究
2022-02-28 08:41杨晓峰李世翔倪梦涵郑琼林
电工技术学报 2022年4期
王 淼 杨晓峰 李世翔 倪梦涵 郑琼林
城市轨道交通直流自耦变压器牵引供电系统故障保护研究
王 淼 杨晓峰 李世翔 倪梦涵 郑琼林
(北京交通大学电气工程学院 北京 100044)
直流自耦变压器(DCAT)牵引供电系统凭借良好的轨道电位和杂散电流治理能力在城市轨道交通领域具有广泛应用前景。然而当直流牵引供电网络发生短路或DCAT自身故障时,传统DCAT由于缺乏故障保护能力,其直流支撑电容和谐振电容可通过故障处放电,进而导致DCAT器件损坏和故障扩散等。为此该文提出了一种故障保护型直流自耦变压器(FP-DCAT),在分析FP-DCAT工作原理基础上,研究了FP-DCAT系统的故障机理,并提出相应的故障保护方案。FP-DCAT故障保护后系统仍可正常运行,但轨道电位和杂散电流却可能因故障FP-DCAT切除而增大,因此研究了故障保护对系统轨道电位和杂散电流的影响。最后,仿真结果表明FP-DCAT系统可有效地实现故障保护,且系统轨道电位和杂散电流变化与理论分析一致,确保FP-DCAT系统在城市轨道交通中安全可靠的运行。
城市轨道交通 直流自耦变压器 故障保护 轨道电位 杂散电流
0 引言
城市轨道交通普遍采用直流牵引供电系统,如国内地铁标准电压等级为1 500V或750V[1-3]。现有直流牵引供电系统中,牵引变电所通过牵引网(或第三轨)给列车供电,然后列车电流通过轨道回流至牵引变电所负极。然而,由于轨道和大地之间并非完全绝缘,且轨道自身存在一定纵向电阻,使得系统中存在轨道电位和杂散电流问题[4-6]。现有治理措施多采用增强轨地绝缘,设置杂散电流收集网、轨道电位限制装置等措施[7-9],但硬件成本较高、效果有限,且性能多随时间推移而逐渐下降。为此,近年来如图1所示的基于电力电子的治理措施得到广泛研究。在现有直流牵引供电系统的基础上,上述治理措施通过安装额外的电力电子装置,将列车电流从轨道转移至回流线,进而实现系统中轨道电位和杂散电流的源头抑制[10-12]。
为此,作为一种基于电力电子的治理措施直流自耦变压器(DC Auto-Transformer, DCAT)牵引供电系统(下文简称“DCAT系统”)近年来得到研究和关注。DCAT系统拓扑如图2所示,DCAT系统在现有直流牵引供电系统的基础上增加回流线和DCAT,此时轨道被DCAT划分为多个区段[13-14]。通过将列车电流从轨道转移至牵引网和回流线,理论上DCAT系统中仅列车运行区段轨道有电流,其他区段轨道无电流,从而有效地降低轨道电位和杂散电流[15]。然而,当直流牵引供电网络或DCAT发生故障时,DCAT中直流支撑电容和谐振电容可能通过故障处快速放电,进而导致DCAT器件损坏和故障扩散等[16-18]。

图1 基于电力电子的轨道电位和杂散电流治理措施示意图

图2 DCAT系统拓扑
采用直流断路器装置实现DCAT故障保护是一种较为理想的技术手段[19-21]。然而,DCAT数量较多,且每台DCAT至少需要两个直流断路器,并分别串入正极端-牵引网之间,以及负极端-回流线之间。显然直流断路器的引入将显著增加DCAT系统硬件成本和体积[22];并且直流断路器对DCAT自身故障保护效果有限,例如DCAT开关管短路,虽然直流断路器能断开故障DCAT与系统的电气连接,避免故障扩散,但直流支撑电容放电回路并未阻断,进而导致故障DCAT器件损坏。常见的开关管短路保护主要通过检测集电极电压CE、发射极-辅助发射极电压Ee、集电极电流C及其变化率等实现故障保护[23-25],但这些保护方案通常存在故障检测盲区、故障检测不及时等问题。对于DCAT中开关管短路,直流支撑电容所并联的开关半桥直通,此时回路中寄生参数很小、放电时间短、瞬间电流峰值高[26],极可能在触发故障保护动作前就已经损坏开关管。为避免开关管短路故障电流快速上升,可通过在回路中串入电感来抑制电流变化率,考虑到DCAT本身就包含谐振电感,故可通过调整DCAT中谐振电感位置来抑制开关管短路故障电流变化率。
因此,为实现DCAT系统更为经济、安全可靠的故障保护,本文通过改进DCAT拓扑结构,提出了一种故障保护型直流自耦变压器(Fault Protection DC Auto-Transformer, FP-DCAT)。通过研究FP-DCAT拓扑和控制策略,针对FP-DCAT系统中典型故障,如直流牵引供电网络故障和FP-DCAT故障等,设计相应保护方案。同时,考虑到故障前后FP-DCAT系统性能发生变化,故研究故障保护动作对系统轨道电位和杂散电流分布的影响。最后,搭建FP-DCAT系统仿真模型对故障保护理论进行验证。
1 FP-DCAT拓扑及控制
FP-DCAT拓扑如图3所示,在图2的传统DCAT的基础上,增加了两个开关管Q1、Q2和两个二极管VD1、VD2来控制FP-DCAT投入或切除,同时调整谐振电感位置来抑制开关管故障电流变化率。相对于传统DCAT中正极端、零极端和负极端分别从直流支撑电容1正极、1负极(即2正极)、2负极引出,FP-DCAT中正极端从开关管Q1和二极管VD1构成的桥臂中点引出,负极端从二极管VD2和开关管Q2构成的桥臂中点引出,零极端引出方式不变。
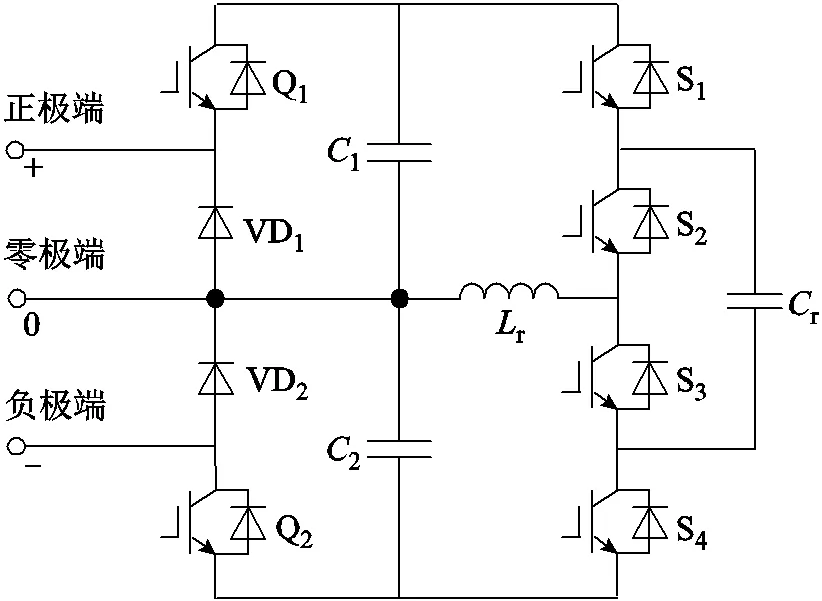
图3 FP-DCAT拓扑
根据FP-DCAT工作状态,FP-DCAT分为如图4所示的正常工况和故障保护工况。对于如图4a的正常工况,开关管Q1、Q2始终导通,且二极管VD1、VD2分别承受直流支撑电容1、2电压,此时FP-DCAT与传统DCAT相类似,仅谐振电感位置调整。而对于如图4b的故障保护工况,开关管Q1、Q2始终关断,且其反并联二极管阻断直流支撑电容和谐振电容放电,避免因电容快速放电而损坏DCAT器件,而二极管VD1、VD2为外部短路电流提供反向通路。此外,开关管S1~S4也始终关断,以避免直流支撑电容1、2之间的能量传递。
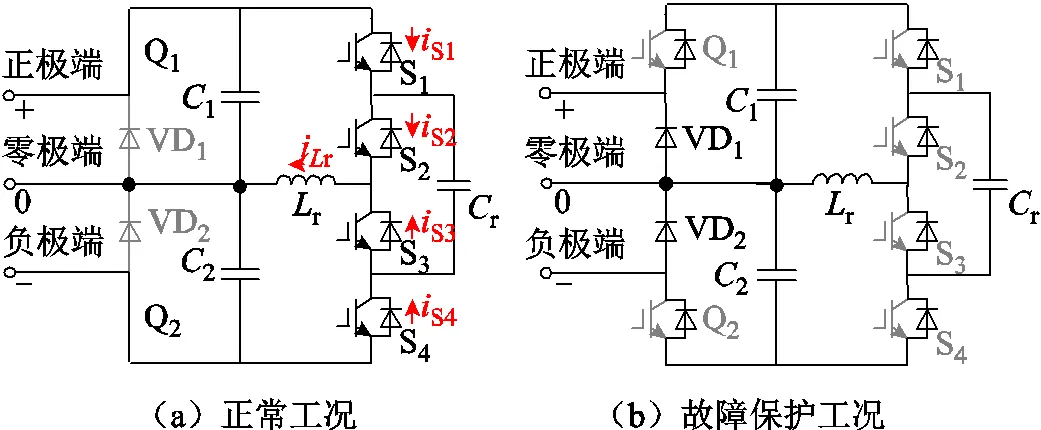
图4 FP-DCAT典型工况
与传统DCAT相类似,以正常工况时FP-DCAT直流支撑电容1向2传递能量为例,此时FP-DCAT可划分为如图5所示的两个工作模态。

图5 FP-DCAT正常工况下工作模态
工作模态一:如图5a所示,开关管S1、S3导通,开关管S2、S4关断,此时直流支撑电容1通过由1-S1-r-S3-r-1构成的谐振回路向谐振电容r传递能量。开关管S1、S3电压电流波形如图6所示,电流从零开始缓缓增大,此时开关管S1、S3均实现零电流开通;且根据谐振频率与开关频率相等,电流谐振到零时工作模态一结束,此时开关管S1、S3均实现零电流关断。
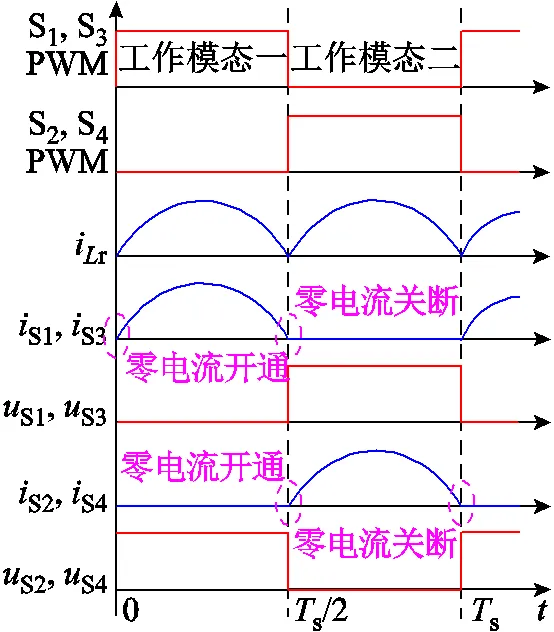
图6 FP-DCAT工作工况下典型波形
工作模态二:如图5b所示,开关管S1、S3关断,开关管S2、S4导通,此时谐振电容r通过由r-S2-r-2-S4-r构成的谐振回路向直流支撑电容2传递能量。同理,根据如图6所示的开关管S2、S4电压电流波形,可知其均实现零电流开通和关断。
显然,工作模态一和工作模态二交替运行确保直流支撑电容1通过谐振电容r向直流支撑电容2进行能量传递。同理,直流支撑电容2向1传递能量与上述分析相类似。显然,稳态时直流支撑电容1、2均可实现电压平衡,且能量传递过程中开关管S1~S4均可实现零电流开通和关断。
2 FP-DCAT系统典型故障及保护
FP-DCAT系统与图2类似,仅需采用FP-DCAT替换系统中传统DCAT。正常情况下,FP-DCAT系统可等效为传统DCAT系统;而当发生故障时,FP-DCAT系统通过检测触发故障保护,避免故障扩散。典型FP-DCAT故障可分为两类:①直流牵引供电网络故障,如牵引网接地、回流线接地等;②FP-DCAT故障,并重点研究负责直流支撑电容1、2之间能量传递的均压电路故障,典型故障如开关管S1~S4短路或开路等。接下来将分别对这两类故障及保护策略进行详细讨论。
2.1 直流牵引供电网络故障
城市轨道交通在实际中长时间运行,不可避免地存在直流牵引供电网络故障风险,最常见且最危险的就是各种形式的接地短路故障,并且随着故障点与牵引变电所的距离不同,故障电流也存在不同特性[27]。
以典型牵引网接地故障(金属性故障)为例[16],分析故障对FP-DCAT影响。为简化分析,采用如图7a所示的单侧牵引变电所供电系统简化模型,此时牵引变电所安装有FP-DCATa,临近故障处安装有FP-DCATb,牵引网接地故障通过闭合开关SF模拟。假设FP-DCATa(牵引变电所)、FP-DCATb、接地故障处、列车处之间的间距依次为1、2和3,此时轨道的单位纵向电阻和电感分别为和,且牵引网和回流线的单位纵向电阻和电感均是轨道的倍。根据FP-DCAT系统工作原理,电流分布如图7a所示,其中FP-DCATa到FP-DCATb之间轨道电流始终为零,且FP-DCATb正极端、零极端和负极端的电流依次表示为2-1、2和1。为便于求解故障电流,对FP-DCAT简化系统进行如图7b所示的等效,其中eq为FP-DCATb中各直流支撑电容和谐振电容之和。

图7 FP-DCAT简化系统故障模型
假设故障发生在零时刻,此时等效开关SF闭合,通过如图7b所示的等效模型可得各故障电流的初始值(即系统正常工作时电流值)分别为

对于故障电流推导,可利用域求解等效模型中故障电流,再将其转换成时域表达式。此时FP-DCATb零极端的故障电流可表示为

其中


同理,可进一步推导FP-DCATb负极端和正极端的故障电流分别为
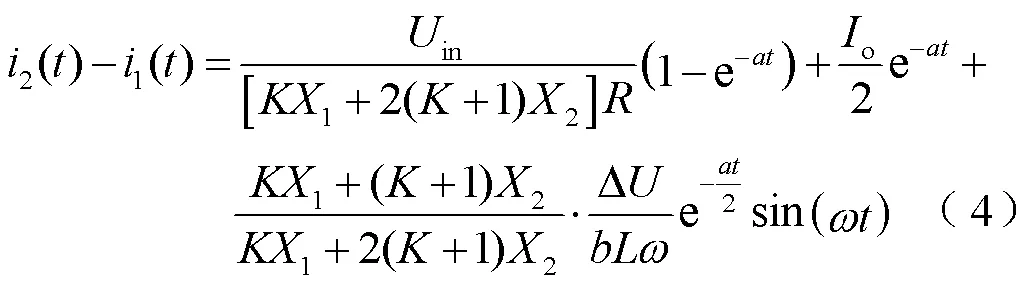
根据式(1)~式(4),可绘制如图8所示的FP-DCAT故障电流曲线。显然,当牵引网接地故障时,FP-DCATb各端子电流不断振荡增大,并趋向于稳态值。故障电流通常远高于额定电流,严重时导致装置中器件过电流损坏。此外,直流牵引供电网络其他故障与牵引网接地故障类似,均使得FP-DCAT各端子电流迅速增大。因此,通过检测FP-DCAT各端子电流,即检测如图3中开关管Q1、Q2电流,当超过安全阈值时,立即关断FP-DCAT中所有开关管,此时该FP-DCAT由正常工况切换至故障保护工况。
显然,采用上述故障保护后,当直流牵引供电网络发生故障时,系统中各FP-DCAT立即切除,避免了各FP-DCAT中器件因过电流而损坏。此时FP-DCAT系统因全部FP-DCAT切除而退化为如图1a所示的现有直流牵引供电系统,然后再通过已有的直流断路器等保护设备断开系统中关键设备与直流牵引供电网络的电气连接,进而实现对列车、牵引变电所等关键设备的保护。
2.2 FP-DCAT故障
FP-DCAT故障主要包括均压电路故障、直流支撑电容故障,以及由开关管Q1、Q2和二极管VD1、VD2组成的容错电路故障等,本文重点关注均压电路故障,且主要以开关管S1~S4故障为主,如驱动异常、焊接脱落等导致的开路故障,关断过电压、过热等导致的短路故障[28]。因此,重点讨论开关管短路或开路故障特性,并设计相应故障保护策略。
对于开关管短路故障,故障开关管可视为导线,当其所在的开关半桥中另一开关管导通时,直流支撑电容通过直通的开关半桥快速放电。相对于传统DCAT,FP-DCAT调整谐振电感位置,利用谐振电感抑制开关管故障电流变化率。以零时刻开关管S1发生短路故障为例,根据如图5所示的FP-DCAT工作模态,下个开关周期内开关管电流S1近似为
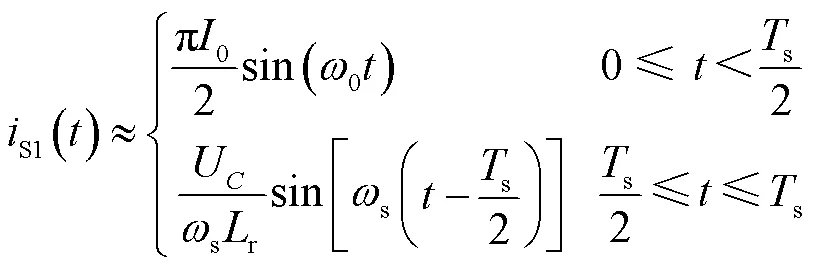

式中,eq为直流支撑电容放电回路等效电阻,即为支撑电容和线路寄生电阻、开关管导通电阻等总和。
根据式(5)、式(6),可绘制如图9所示的开关管电流曲线。显然,由于eq阻值很小,传统DCAT开关管短路故障,直流支撑电容通过回路等效电阻eq放电,此时电流尖峰高、放电速度快,极易在其他开关器件的驱动触发短路保护前就已经损坏器件或严重降低器件寿命,进而导致故障扩散。而对于FP-DCAT开关管短路故障,由于谐振电感位置调整,此时谐振电感串入任意直流支撑电容在开关管短路故障的放电回路中。由于直流支撑电容远大于谐振电容,即角频率s远小于谐振角频率0,此时开关管故障电流近似为从零开始线性增大。因此,通过预设短路故障电流阈值,且实时检测各开关管电流或谐振电感电流,并在其触发阈值后封锁全部开关管脉冲以实现故障FP-DCAT切除,进而有效地防止故障扩散,避免其他器件过电流损坏。
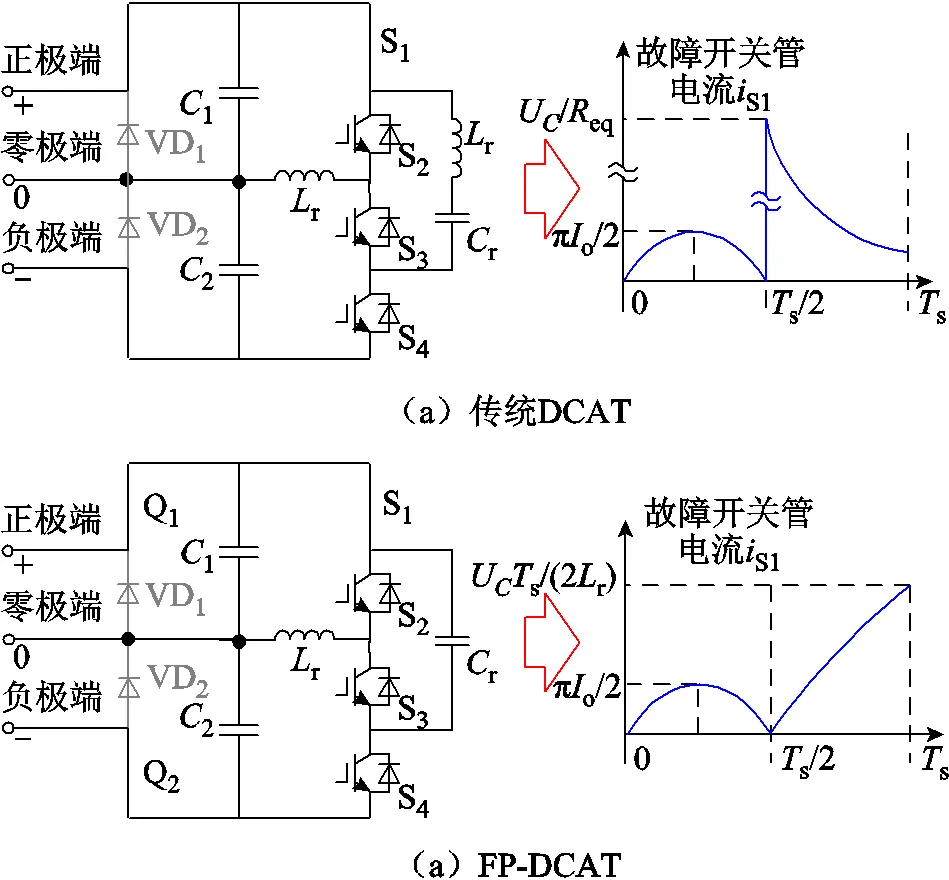
图9 短路故障后开关管S1电流曲线
对于开关管开路故障,首先需要明确FP-DCAT在正常工况下能量流动模式,此时根据直流支撑电容1、2能量流动分为两种模式:图10a所示的Boost模式,直流支撑电容1向2传递能量,各端子电流方向为零极端流出,正极端和负极端流入;图10b所示的Buck模式,直流支撑电容2向1传递能量,各端子电流方向为零极端流入,正极端和负极端流出。

图10 FP-DCAT正常工况下能量流动
显然,在正常工况下FP-DCAT能量双向流动,可根据需求自由地在Boost模式和Buck模式之间切换。而当发生开关管开路故障,假设故障开关管的反并联二极管仍可正常工作,此时FP-DCAT由能量双向流动变为能量单向流动。根据图5中典型工作模态的能量流动路径,可知当开关管S1、S2发生开路故障(即第一类开路故障),FP-DCAT仅可工作在Buck模式;而当开关管S3、S4发生开路故障(即第二类开路故障),FP-DCAT仅可工作在Boost模式。因此,当FP-DCAT所需模式与开路故障后固定模式相同,则故障FP-DCAT等效为正常工作;而当FP-DCAT所需模式与开路故障后固定模式不同,则故障FP-DCAT等效为切除,此时由相邻FP-DCAT代替故障FP-DCAT进行能量传递。
因此,开关管开路故障使得故障FP-DCAT处于“半切除”状态。此时故障FP-DCAT不存在器件过电压、过电流等问题,仅由能量双向流动变为能量单向流动,进而导致在与其限定能量流动方向所反向的情况下故障FP-DCAT无能量传递,此时原本应由故障FP-DCAT传递的能量全部转移至与其相邻的FP-DCAT中。此外,当发生开关管开路故障,故障FP-DCAT可直接切除,也可保留故障继续运行直至更多FP-DCAT出现故障,然后再切除所有FP-DCAT以便于统一维护。
3 FP-DCAT系统故障保护前后特性对比
当直流牵引供电网络发生故障时,FP-DCAT系统经故障保护后断电,供电回路中电流降低为零,故系统中轨道电位和杂散电流也降低为零。然而,当某个FP-DCAT发生故障时,FP-DCAT系统经过故障保护后仍可正常运行,但系统中轨道电位和杂散电流却随着FP-DCAT故障保护而存在一定变化。
为简化分析,以三区段FP-DCAT系统、牵引变电所直接接地为例[11],此时FP-DCAT系统在故障前的电流分布如图11所示。显然,当列车从牵引网获取能量时,根据任意区段中FP-DCAT端子电流方向可知,此时FP-DCAT0和FP-DCAT3始终工作在Boost模式,而FP-DCAT1和FP-DCAT2工作在Buck模式或无能量流动。此外,当列车向牵引网注入能量时,列车电流方向随之变化,各FP-DCAT电流方向也随之变化,此时FP-DCAT0和FP-DCAT3始终工作在Buck模式,而FP-DCAT1和FP-DCAT2工作在Boost模式或无能量流动。

图11 FP-DCAT系统电流分布
3.1 开关管短路
当某个FP-DCAT发生开关管短路故障,根据上述故障保护策略,故障FP-DCAT立即切除,且响应时间远小于列车在两个牵引变电所之间的运行时间,因此,在研究FP-DCAT系统故障前后特性时可近似认为开关管短路故障发生至切除在瞬间完成。同时,考虑到三区段FP-DCAT系统的对称性,选取FP-DCAT0和FP-DCAT1切除对系统性能影响开展相应分析。此外,考虑到系统中轨道电位和杂散电流可根据轨道电流来推导,故借助FP-DCAT切除前后系统电流分布变化,可更为直观地展示故障保护对系统性能的影响。
以列车运行在区段1为例,FP-DCAT0切除时系统电流分布如图12a所示,轨道电流无变化,仅FP-DCAT3容量增大;FP-DCAT1切除时系统电流分布如图12b所示,新增区段2上轨道电流,FP-DCAT2由无能量传递切换至Boost模式,且各FP-DCAT容量均有所变化。
同理,进一步扩展至列车运行在不同区段,此时可推导得到故障保护前后各FP-DCAT模式及轨道电流分布见表1,其中“—”表示该FP-DCAT无能量流动,“1”表示该区段有轨道电流,“0”表示该区段无轨道电流。特别当FP-DCAT0因故障切除且列车运行于区段2时,FP-DCAT1模式随列车位置变化而变化,即当列车位于靠近FP-DCAT1侧时,FP-DCAT1工作在Buck模式;而当列车位于靠近FP-DCAT2侧时,FP-DCAT1工作在Boost模式。

图12 列车运行在区段1时FP-DCAT系统电流分布
表1 故障保护前后FP-DCAT模式及轨道电流分布

Tab.1 Modes of FP-DCAT and current distributions of system before and after fault protection
根据上述理论分析,当列车运行在区段1时,对于故障前或FP-DCAT0因故障切除,可以推导此时列车处轨道电位T和系统杂散电流S为

式中,S、、o、、g分别为牵引变电所间距、列车位置(即列车与牵引变电所1的间距)、列车电流、轨道单位纵向电阻和轨地过渡电阻。显然,轨道电位和杂散电流随列车位置变化而不断变化。同理,因故障切除,对于FP-DCAT1,此时列车处轨道电位T和系统杂散电流S可表示为


为更具体地展示FP-DCAT系统在开关管短路故障保护前后系统性能,选取表2所示的北京亦庄线某段列车运行特性及线路参数。零时刻开始一辆列车从牵引变电所1向牵引变电所2运行,且当一辆列车抵达牵引变电所2后,下一辆列车再次从牵引变电所1出发。根据式(7)、式(8)以及其他区段上轨道电位和杂散电流推导公式,可绘制如图14所示的轨道电位和杂散电流对比曲线。

图13 故障保护前后轨道电位和杂散电流
表2 北京亦庄线某段线路参数

Tab.2 Parameters of Beijing Yizhuang Line

根据故障时刻为200s可推断,故障发生在第二辆列车运行在区段1时,且该列车即将进入区段2。考虑到开关管短路故障发生至故障保护动作(即故障FP-DCAT切除)视为瞬间完成,对于FP-DCAT0故障,根据图13中FP-DCAT0切除和无故障对比,可知轨道电位和杂散电流在图14中无突变,且仅当列车运行在区段2和区段3时,FP-DCAT0切除使得轨道电位和杂散电流增大;而列车运行在区段1时,FP-DCAT0切除对轨道电位和杂散电流无影响。对于FP-DCAT1故障,根据图13中FP-DCAT1切除和无故障对比,可知轨道电位和杂散电流在图14中存在突变增大的影响,此时仅当列车运行在区段1和区段2时,FP-DCAT1切除使得轨道电位和杂散电流增大;而列车运行在区段3时,FP-DCAT1切除对轨道电位和杂散电流无影响。
此外,对比不同情况下轨道电位和杂散电流可见,FP-DCAT系统相对于现有系统,轨道电位和杂散电流明显降低;并且当FP-DCAT发生故障并切除时,系统中轨道电位和杂散电流均有所增大,但相对于现有系统,FP-DCAT系统在故障保护后仍能实现轨道电位和杂散电流的治理。
3.2 开关管开路
当某个FP-DCAT发生开关管开路故障,根据上述故障保护策略,故障FP-DCAT带故障运行,此时其处于“半切除”状态,能量双向流动变为能量单向流动。此时FP-DCAT第一类开路故障使其仅可工作在Buck模式,而第二类开路故障使其仅可工作在Boost模式。FP-DCAT所需模式主要与列车所在运行区段以及列车电流方向有关。其中,列车电流方向在制动工况时发生变化,此时列车运行在区段3上,且FP-DCAT1无能量传递。同样,考虑到三区段FP-DCAT系统对称性,选取FP-DCAT1和FP-DCAT2发生开关管开路故障来对比二者差异。
由表1可知,当列车电流为正时各FP-DCAT所处模式,同时对照图14a中列车电流,可知列车为牵引和巡航工况,且位置对应区段1、区段2,以及小部分区段3;而对于列车电流为负,此时列车为制动工况,位置对应大部分区段3,此时各FP-DCAT所处模式与表1中列车运行在区段3时恰好相反。综合上述各种情况可知,FP-DCAT1仅工作在Buck模式或无能量流动,而FP-DCAT2可能工作在Buck模式、Boost模式或无能量流动。因此,FP-DCAT1第一类开路故障可等效为正常工作,第二类开路故障可等效为切除;而FP-DCAT2第一类开路故障或第二类开路故障均需要结合具体情况进行讨论。
对于FP-DCAT2第一类开路故障,当列车电流为正时,FP-DCAT2等效为正常工作,此时系统电流分布如图11所示;而当列车电流为负时,FP-DCAT2等效为切除,此时列车运行在区段3上,系统电流分布如图15a所示,轨道电流扩散至区段2,且FP-DCAT1由无能量传递切换至Boost模式。而对于FP-DCAT2第二类开路故障,当列车电流为负时,FP-DCAT2等效为正常工作,此时系统电流分布如图15b所示;当列车电流为正且列车运行在区段1时,FP-DCAT2无能量流动,系统正常运行;而当列车电流为正且列车运行在区段2或区段3时,FP-DCAT2等效为切除,此时系统电流分布如图15c所示,此时区段2和区段3均存在轨道电流,且FP-DCAT1容量也由于故障FP-DCAT2退出运行而增大。

图15 FP-DCAT2开路故障后系统电流分布
同样地,为了更具体展示FP-DCAT系统在开关管开路故障保护前后的系统性能,借助上述北京亦庄线列车运行特性及线路参数,绘制如图16所示的开关管开路故障保护前后轨道电位和杂散电流对比曲线。显然,当开关管开路故障发生后,故障FP-DCAT可继续带故障运行,此时需根据其所属于第一类开路故障或第二类开路故障再分别进行讨论;同时,故障FP-DCAT也可以直接切除,且此时近似认为故障发生至故障FP-DCAT切除瞬间完成。
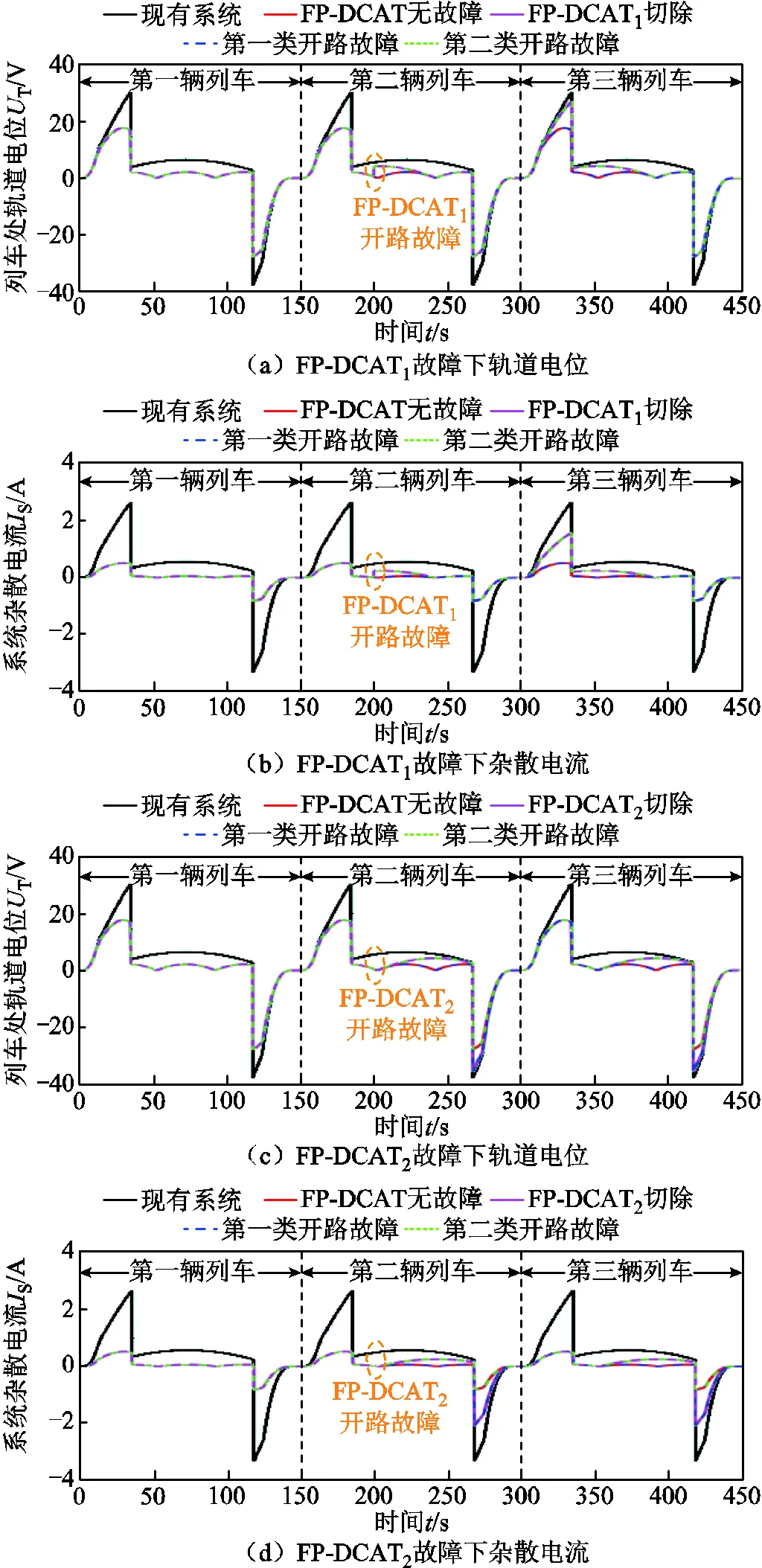
图16 FP-DCAT开关管开路故障保护前后轨道电位和杂散电流对比
对于如图16a和图16b所示的FP-DCAT1开路故障,故障时刻FP-DCAT1存在能量流动,轨道电位和杂散电流可能突变。其中,第一类开路故障等效为无故障,此时轨道电位和杂散电流无变化;而第二类开路故障等效为直接切除,故障时刻轨道电位和杂散电流突变,列车运行在区段1和区段2时轨道电位和杂散电流均增大,而运行在区段3时FP-DCAT1无能量传递,轨道电位和杂散电流无变化。而对于如图16c和图16d所示的FP-DCAT2开路故障,故障时刻FP-DCAT2无能量流动,轨道电位和杂散电流无突变。其中,第一类开路故障仅当列车运行在区段3且电流为负时等效为直接切除,第二类开路故障仅当列车运行在区段2和区段3且电流为正时等效为直接切除,此时轨道电位和杂散电流增大;而其他位置处开路故障均等效为无故障。通过上述对比可见,开路故障使得故障FP-DCAT处于“半切除”状态,系统中轨道电位和杂散电流相对于无故障时有所增大,但却比将故障FP-DCAT直接切除具有更好的轨道电位和杂散电流治理效果。
4 仿真验证
为验证上述理论分析,基于Matlab/Simulink搭建FP-DCAT系统仿真模型,此时系统线路参数和FP-DCAT参数分别见表2和表3。

表3 FP-DCAT仿真参数 Tab.3 Simulation parameters of FP-DCAT
对于直流牵引供电网络故障,选取零时刻牵引网接地,此时FP-DCATa、FP-DCATb、接地故障处与列车处之间的间距依次为1km、0.5km和0.3km,牵引网和回流线的单位纵向电阻和电感均是轨道的3倍,且列车电流选取为1 000A。代入FP-DCAT简化系统仿真模型,得到各端子故障电流仿真波形如图17a所示。同时根据式(2)~式(4)绘制故障电流理论曲线,并得到如图17b所示的误差曲线。显然,各端子故障电流仿真波形与理论曲线基本重合,且误差可控制在1.0%以内。同时,各端子故障电流逐渐增大且最终趋于稳态值,此时稳态故障电流约是初始电流的7.1倍,显然该故障电流将严重威胁FP-DCAT装置正常运行。因此,通过设置端子电流安全阈值,在故障电流上升至阈值时,断开FP-DCAT与直流牵引供电网络电气连接,进而避免各FP-DCAT中器件因过电流而损坏。

图17 FP-DCATb各端子故障电流仿真波形
对于FP-DCAT故障,选取零时刻开关管S1发生短路故障,此时开关管S1电流仿真波形如图18a所示。显然,零时刻后工作模态一正常工作,而工作模态二中由于开关管S2闭合,直流支撑电容快速放电,开关管电流在谐振电感限制下近似线性增大,经5.4μs到达阈值4 000A后触发故障保护,此时响应时间与式(5)中理论结果基本相吻合。此外,通过增大谐振电感可延长触发阈值的响应时间,如采用10μH谐振电感替换表3中1μH谐振电感且保证谐振频率不变时,此时经过53.5μs触发阈值。此外,同样选取零时刻开关管S1发生开路故障(对应第一类开路故障),以及开关管S3发生开路故障(对应第二类开路故障),且故障前FP-DCAT工作在Boost模式。显然,第一类开路故障限定FP-DCAT仅可工作在Buck模式,此时故障FP-DCAT等效为切除,故障后开关管S1电流为零,如图18b所示,故障FP-DCAT无能量流动;第二类开路故障限定FP-DCAT仅可工作在Boost模式,此时故障FP-DCAT等效为正常工作,故障后开关管S1电流无变化,如图18c所示,故障FP-DCAT能量流动不变。

图18 FP-DCAT典型故障下开关管S1电流仿真波形
对于DCAT故障对系统性能影响,分别选取现有系统、FP-DCAT无故障、FP-DCAT1和FP-DCAT2短路故障、FP-DCAT2第一类开路故障和第二类开路故障等进行仿真,此时单辆列车从牵引变电所1运行至牵引变电所2,列车电流如图14a所示,且FP-DCAT故障均已在列车运行前发生且完成故障保护。此时上述各种情况下轨道电位和杂散电流的仿真结果和理论结果对比曲线如图19所示,且牵引工况和制动工况下最大轨道电位和杂散电流见表4。显然,图19中仿真结果与理论结果基本一致,且表4中各种情况下平均误差均低于1%左右,进而有效地验证了上述理论分析的正确性。相对于现有系统,FP-DCAT系统中轨道电位和杂散电流显著降低,如图19a所示。对于FP-DCAT短路故障,故障FP-DCAT从系统中直接切除,即断开与直流牵引供电网络之间电气连接,此时系统中轨道电位和杂散电流相对于无故障系统均有所增大,如图19b所示。显然,FP-DCAT1短路故障主要影响牵引工况下轨道电位和杂散电流,而FP-DCAT2短路故障主要影响制动工况下轨道电位和杂散电流。对于FP-DCAT开路故障,故障FP-DCAT未从系统中切除,即仍与直流牵引供电网络保持电气连接,此时系统中轨道电位和杂散电流相对于无故障系统均有所增大,但却优于将故障FP-DCAT切除,如图19c所示。考虑到牵引工况下FP-DCAT2无能量流动,因此两种开路故障对牵引工况下轨道电位和杂散电流均无影响。制动工况下FP-DCAT2第一类开路故障等效为切除,此时轨道电位和杂散电流增大,故表4中FP-DCAT2第一类开路故障数据与FP-DCAT2短路故障(即切除)数据基本一致;而制动工况下FP-DCAT2第二类开路故障等效为正常工作,此时轨道电位和杂散电流无变化,故表4中FP-DCAT2第二类开路故障数据与FP-DCAT无故障数据基本一致。

图19 轨道电位和杂散电流的仿真结果与理论结果对比
表4 轨道电位和杂散电流的仿真和理论数据
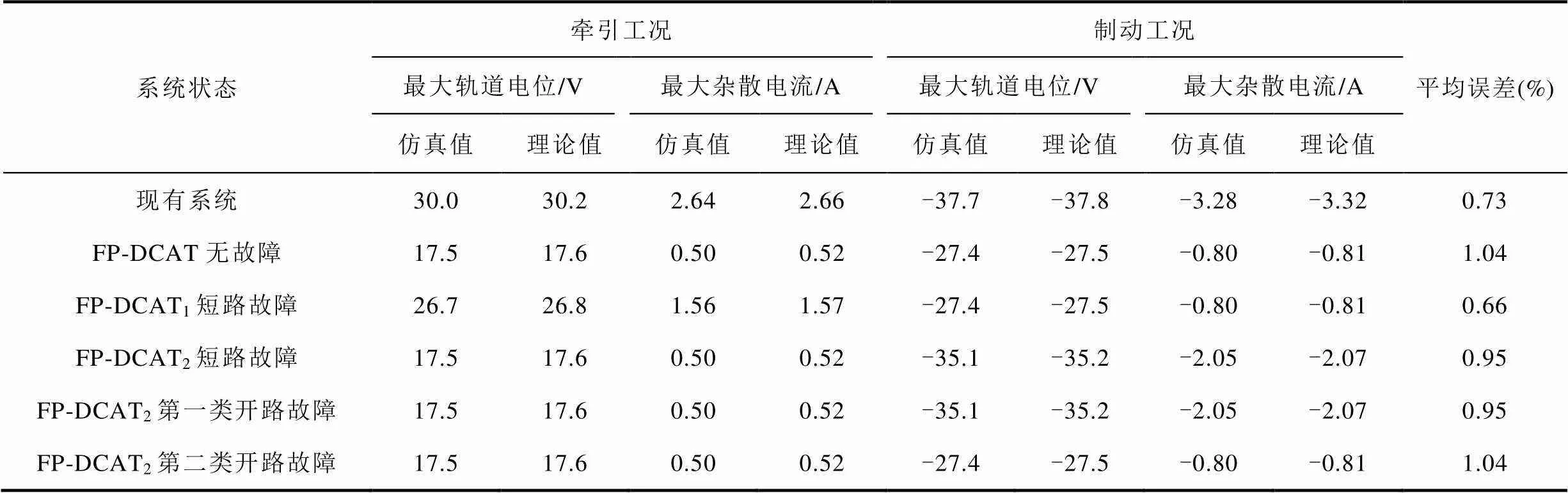
Tab.4 Simulation and theoretical results of rail potential and stray current
5 结论
针对传统DCAT系统应对典型故障的局限性,本文提出一种故障保护型FP-DCAT,对系统中典型故障及保护策略进行研究,并分析故障保护对系统性能影响。仿真结果表明:
1)FP-DCAT能够有效地实现故障保护,避免故障扩散,防止其他器件因故障而损坏。
2)当直流牵引供电网络发生接地短路故障,全部FP-DCAT均断开与直流牵引供电网络之间的电气连接,确保自身安全。
3)当FP-DCAT中开关管发生短路故障,故障FP-DCAT断开与直流牵引供电网络之间电气连接,系统仍可正常运行,但此时轨道电位和杂散电流治理效果降低。
4)当FP-DCAT中开关管发生开路故障,无需断开故障DCAT与直流牵引供电网络之间电气连接,系统仍可正常运行,仅故障FP-DCAT能量双向流动变为能量单向流动,且此时轨道电位和杂散电流治理效果优于将该故障FP-DCAT移除出系统。
[1] Hao Fengjie, Zhang Gang, Chen Jie, et al. Optimal voltage regulation and power sharing in traction power systems with reversible converters[J]. IEEE Transactions on Power Systems, 2020, 35(4): 2726-2735.
[2] 李进, 张钢, 刘志刚, 等. 城轨交通用飞轮储能阵列控制策略[J]. 电工技术学报, 2021, 36(23): 4885-4895.
Li Jin, Zhang Gang, Liu Zhigang, et al. Control strategy of flywheel energy storage array for urban rail transit[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4885-4895.
[3] 刘宇嫣, 杨中平, 林飞, 等. 城轨地面式混合储能系统自适应能量管理与容量优化配置研究[J]. 电工技术学报, 2021, 36(23): 4874-4884.
Liu Yuyan, Yang Zhongping, Lin Fei, et al. Study on adaptive energy management and optimal capacity configuration of urban rail ground hybrid energy storage system[J]. Transactions of China Electrote-chnical Society, 2021, 36(23): 4874-4884.
[4] 杨晓峰, 薛皓, 郑琼林. 基于双向可变电阻模块的杂散电流与轨道电位动态模拟系统[J]. 电工技术学报, 2019, 34(13): 2793-2805.
Yang Xiaofeng, Xue Hao, Zheng Trillion Q. Stray current and rail potential dynamic simulation system based on bidirectional variable resistance module[J]. Transactions of China Electrotechnical Society, 2019, 34(13): 2793-2805.
[5] Lin Sheng, Zhou Qi, Lin Xiaohong, et al. Infinitesimal method based calculation of metro stray current in multiple power supply sections[J]. IEEE Access, 2020, 8: 96581-96591.
[6] Du Guifu, Wang Jun, Jiang Xingxing, et al. Evaluation of rail potential and stray current with dynamic traction networks in multitrain subway systems[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 784-796.
[7] Sahil Bhagat, 杨晓峰, 王淼, 等. 城市轨道交通杂散电流治理的综述与评估(英文)[J]. 电工技术学报, 2021, 36(23): 4851-4863.
Sahil Bhagat, Xiaofeng Yang, Miao Wang, et al. Review and evaluation of stray current mitigation for urban rail transit[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4851-4863.
[8] 刘炜, 尹乙臣, 潘卫国, 等. 直流动态杂散电流在分层介质中的扩散模型[J]. 电工技术学报, 2021, 36(23): 4864-4873.
Liu Wei, Yin Yichen, Pan Weiguo, et al. Diffusion model of DC dynamic stray current in layered soil[J]. Transactions of China Electrotechnical Society, 2021, 36(23): 4864-4873.
[9] Xu Shaoyi, Wei Li, Wang Yuqiao. Effects of vehicle running mode on rail potential and stray current in DC mass transit systems[J]. IEEE Transactions on Vehicular Technology, 2013, 62(8): 3569-3580.
[10] Gu Jingda, Yang Xiaofeng, Zheng Trillion Q, et al. Negative resistance converter traction power system for reducing rail potential and stray current in the urban rail transit[J]. IEEE Transactions on Transportation Electrification, 2021, 7(1): 225-239.
[11] 顾靖达, 杨晓峰, 郑琼林, 等. 基于不同接地方式与列车工况的负阻变换器牵引供电系统轨道电位和杂散电流[J]. 电工技术学报, 2021, 36(8): 1703-1717.
Gu Jingda, Yang Xiaofeng, Zheng Trillion Q, et al. Rail potential and stray current on negative resistance converter traction power system under different grounding schemes and train conditions[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1703-1717.
[12] Andrea Mariscotti. Electrical safety and stray current protection with platform screen doors in DC rapid transit[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1724-1732.
[13] Wang Miao, Yang Xiaofeng, Ni Menghan, et al. Dynamic performance analysis, optimization and verification of DC auto-transformer system with rail potential and stray current emulator[J]. IEEE Transactions on Transportation Electrification, 2021, DOI: 10.1109/TTE.2021.3102424.
[14] Ni Menghan, Yang Xiaofeng, Wang Miao, et al. Dynamic performance analysis of DCAT system for urban rail transit[C]//IEEE Transportation Electrification Conference and Exposition, Chicago, 2020: 1123-1127.
[15] Wang Miao, Yang Xiaofeng, Zheng Trillion Q, et al. DC autotransformer-based traction power supply for urban transit rail potential and stray current mitigation[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 762-773.
[16] 和敬涵, 孟鑫, 宋晓明, 等. 基于时域微分的地铁直流牵引系统故障定位[J]. 电工技术学报, 2016, 31(3): 164-170.
He Jinghang, Meng Xin, Song Xiaoming, et al. Fault location research of DC railway traction system based on time-domain differential[J]. Transactions of China Electrotechnical Society, 2016, 31(3): 164-170.
[17] 李夏青, 左丽. 直流牵引网故障电流能量谱及特征矢量[J]. 电工技术学报, 2010, 25(11): 164-168.
Li Xiaqing, Zuo Li. Energy spectrum and eigenvector of DC traction power supply short-circuit current[J]. Transactions of China Electrotechnical Society, 2010, 25(11): 164-168.
[18] Enrico Pons, Riccardo Tommasini, Pietro Colella. Fault current detection and dangerous voltages in DC urban rail traction systems[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 4109-4115.
[19] 荣命哲, 杨飞, 吴翊, 等. 直流断路器电弧研究的新进展[J]. 电工技术学报, 2014, 29(1): 1-9.
Rong Mingzhe, Yang Fei, Wu Yi, et al. New developments in switching arc research in DC circuit breaker[J]. Transactions of China Electrotechnical Society, 2014, 29(1): 1-9.
[20] 薛士敏, 陈超超, 金毅, 等. 直流配电系统保护技术研究综述[J]. 中国电机工程学报, 2014, 34(19): 3114-3122.
Xue Shimin, Chen Chaochao, Jin Yi, et al. A research review of protection technology for DC distribution system[J]. Proceedings of the CSEE, 2014, 34(19): 3114-3122.
[21] Kenichiro Sano, Masahiro Takasaki. A surgeless solid-state DC circuit breaker for voltage-source- converter-based HVDC systems[J]. IEEE Transa-ctions on Industry Applications, 2014, 50(4): 2690-2699.
[22] 朱志豪, 赵芳帅, 袁端磊, 等. 城市轨道交通大容量直流快速断路器的研发[J]. 高电压技术, 2018, 44(2): 417-423.
Zhu Zhihao, Zhao Fangshuai, Yuan Duanlei, et al. Research and development of high-power and high-speed DC circuit breaker for urban rail transit[J]. High Voltage Engineering, 2018, 44(2): 417-423.
[23] 胡亮灯, 孙驰, 陈玉林, 等. 大功率IGBT的短路故障检测[J]. 电工技术学报, 2018, 33(11): 2592-2603.
Hu Liangdeng, Sun Chi, Chen Yulin, et al. Short-circuit fault detection for high-power IGBT[J]. Transactions of China Electrotechnical Society, 2018, 33(11): 2592-2603.
[24] 柳舟洲, 同向前. 大功率IGBT短路保护机理的分析[J]. 电气传动, 2015, 45(3): 77-80.
Liu Zhouzhou, Tong Xiangqian. Analysis of the short circuit protection mechanism of high power IGBT device[J]. Electric Drive, 2015, 45(3): 77-80.
[25] Mohamed Halick Mohamed Sathik, Prasanth Sundararajan. Short circuit detection and fault current limiting method for IGBTs[J]. IEEE Transactions on Device and Materials Reliability, 2020, 20(4): 686-693.
[26] Tomoyuki Mannen, Keiji Wada. Control method for overvoltage suppression across the DC capacitor in a grid-connection converter using leg short circuit of power MOSFETs during the initial charge[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 4012-4019.
[27] Jae-Do Park. Ground fault detection and location for ungrounded DC traction power systems[J]. IEEE Transactions on Vehicular Technology, 2015, 64(12): 5667-5676.
[28] 汪波, 胡安, 唐勇, 等. IGBT电压击穿特性分析[J]. 电工技术学报, 2011, 26(8): 145-150.
Wang Bo, Hu An, Tang Yong, et al. Analysis of voltage breakdown characteristic of IGBT[J]. Transactions of China Electrotechnical Society, 2011, 26(8): 145-150.
Fault Protection of DC Auto-Transformer Traction Power Supply System for Urban Rail Transit
Wang Miao Yang Xiaofeng Li Shixiang Ni Menghan Trillion Q. Zheng
(School of Electrical Engineering Beijing Jiaotong University Beijing 100044 China)
DC auto-transformer (DCAT) traction power supply system has a promising application prospect in urban rail transit because of the rail potential and stray current mitigation. However, the traditional DCAT may lack the sufficient fault protection capability, when DC traction power supply network short circuit or device failure of DCATs. DC-link capacitors and resonant capacitor of DCAT may discharge rapidly through the fault, which leads to the device damage of DCAT and fault pervasion. Therefore, the fault protection DC auto-transformer (FP-DCAT) is proposed in this paper. With the research on topology and control of FP-DCAT, the fault protection schemes of FP-DCAT system for typical faults are studied in detail. FP-DCAT system may operate normally after fault protection, but the rail potential and stray current of system may increase due to the removal of fault FP-DCAT. Thus the effects of fault protection on the rail potential and stray current are analyzed. Finally, the simulation results show that FP-DCAT system achieves fault protection effectively, and the variation of rail potential and stray current due to fault protection is consistent with the theoretical analysis, which ensures the high safety and reliability of FP-DCAT system applied to urban rail transit.
Urban rail transit, DC auto-transformer, fault protection, rail potential, stray current
10.19595/j.cnki.1000-6753 tces.210880
TM46
王 淼 男,1994年生,博士研究生,研究方向为谐振开关电容变换器、电力电子技术在轨道交通中的应用等。E-mail:wangmiao@bjtu.edu.cn
杨晓峰 男,1980年生,副教授,研究方向为多电平变换器技术、柔性直流输电技术、电力电子技术在轨道交通中的应用等。E-mail:xfyang@bjtu.edu.cn(通信作者)
国家自然科学基金重点项目资助(51737001)。
2021-06-16
2021-09-05
(编辑 郭丽军)
猜你喜欢
云南画报(2021年11期)2022-01-18
建材发展导向(2021年7期)2021-07-16
铁道通信信号(2021年6期)2021-07-08
铁道通信信号(2020年1期)2020-09-21
通信技术(2020年6期)2020-07-19
现代经济信息(2020年34期)2020-06-08
科技视界(2020年8期)2020-05-18
铁道通信信号(2020年9期)2020-02-06
青年歌声(2019年2期)2019-02-21
电子制作(2017年23期)2017-02-02
