
地面三维激光扫描仪在古建筑现状测绘中的应用
2022-02-25 08:37:54陕西工业职业技术学院陕西咸阳712000
砖瓦 2022年1期
王 宁(陕西工业职业技术学院,陕西 咸阳 712000)
文物建筑的勘察设计、检测、鉴定的过程中,其现状测绘是非常重要的一个环节。文物建筑的现状测绘包括文物本体的测量和文物本体所处场地测量。由于古建筑的建筑构成十分复杂,曲面结构较多,传统的测绘方法需要耗费大量人力物力,测绘成果单一且极易损害文物建筑本体。随着三维激光扫描技术的发展,三维激光扫描技术已经成为空间数据获得的重要手段。相较于传统测绘方法,三维激光扫描技术具有非接触,高精度,全信息,多成果的特点,非常适合文物古建的现状测绘。三维激光扫描技术在文物古建筑的保护、维修、宣传展示、数字存档等多个方面都发挥着重要作用。本文主要研究三维激光扫描仪在古建筑测绘中应用的技术流程。
1 古建筑现状测绘流程
1.1 外业采集
采用三维激光扫描仪对古建筑进行测绘的数据采集方法与测绘本体及现场的复杂程度和古建筑的测绘深度有关。本体及场地越复杂,扫描设站也就越密集,测绘深度越深,测绘精细度要求越高。测绘文物建筑及所在场地复杂程度见表1。
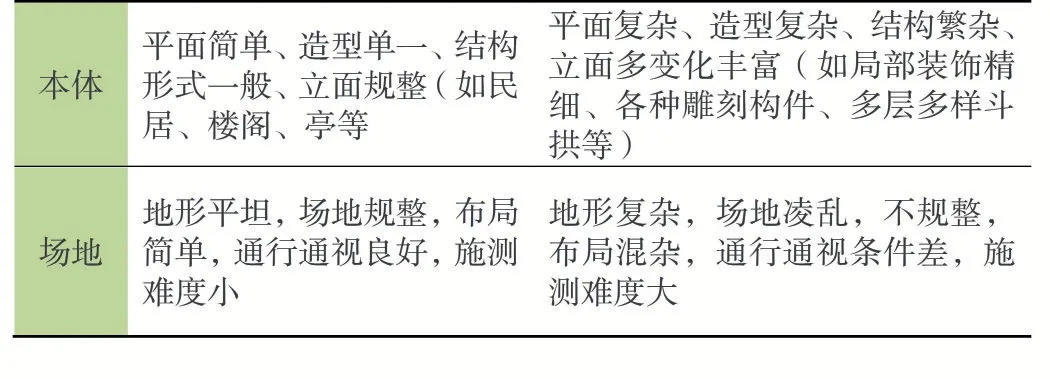
表1 文物建筑及所在场地复杂程度
根据现场情况优先选择球形标靶进行拼接,对于极复杂的情况(不适合放置靶球)可使用平面标靶和地物特征点作为测站拼接的公共点。球形标靶大致呈正三角形分布,标靶距离10m以内,高低错落。平面标靶(地物特征点)作为测站公共点时确保标靶平面与标靶中心(地物特征点)到扫描仪中心连线夹角大于75°。扫描仪的扫描分辨率设置依据扫描距离和测绘深度综合确定。扫描距离越远、测绘深度越深扫描分辨率相应设置越高。
1.2 数据处理
古建筑测绘的数据处理主要包括数据预处理和制图与建模两个部分。数据预处理包括点云的拼接、裁剪、去噪、重采样等步骤。制图与建模包括文物古建的平面图、立面图、剖面图、详图大样等平面图的制图以及三维模型重建。
1.2.1 数据预处理
地面三维激光扫描仪点云匹配需要人工选取公共点进行测站拼接,球形标靶和平面标靶可实现自动识别,地物特征点需要人工手动拾取。首先进行点云拼接,统一各个测站的坐标系;扫描仪在扫描过程中由于周围环境的影响(空气中的浮尘、运动物体的干扰等)会产生大量的离群噪声点,这些噪声点会为后期的制图与建模产生影响,因此需要去除噪声点;通过数据裁剪可以去掉与建筑物本体无关的数据,以减小数据量;通过重采样可以获得比较均匀的点云数据,便于下一步的制图与建模。
1.2.2 制图与建模
1.2.2 .1 制图
利用三维点云数据制作文物古建筑的俯视图、正视图与侧视图,然后对图像进行矢量化得到平面图、立面图与剖面图等成果。
1.2.2 .2 建模
对古建筑的三维点云数据经过封装、孔洞填充、网格编辑、纹理贴图等步骤得到最终的三维模型。
2 应用实例
2.1 古建筑数据采集
本次古建筑的三维扫描使用Z+FIMAGER5010X三维激光扫,相关参数见表2。
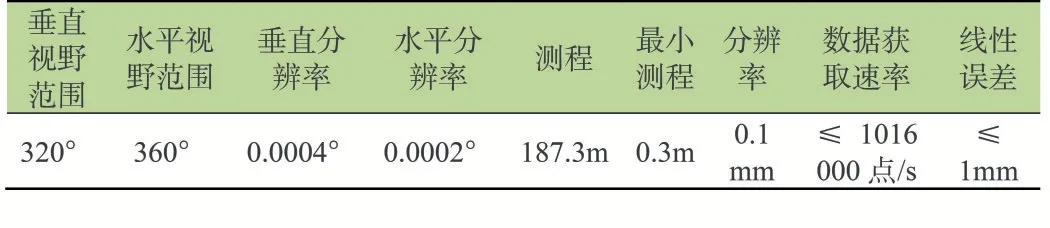
表2 Z+FIMAGER5010X三维激光扫描仪参数
根据古建筑现场情况和建筑本体的大小合理规划测站位置,放置球形标靶,建筑物内外共设置十五个测站,保证相邻测站扫描无死角。室外扫描仪因扫描距离较远,因此扫描的精度设置为高,扫描分辨率设置为高;室内扫描测距离相对较小,扫描的精度设置为高,扫描分辨率设置为中,以提高扫描效率。站分布如图1所示。

图1 扫描测站分布图
2.2 数据处理
将数据导入到Z+FLaserControl中进行数据的拼接、去噪等工作,然后数据导入到PointCab中生成平面图和剖面图的正射影像,然后在CAD软件中进行矢量化,绘制建筑平面图与剖面图。部分成果图见图2。
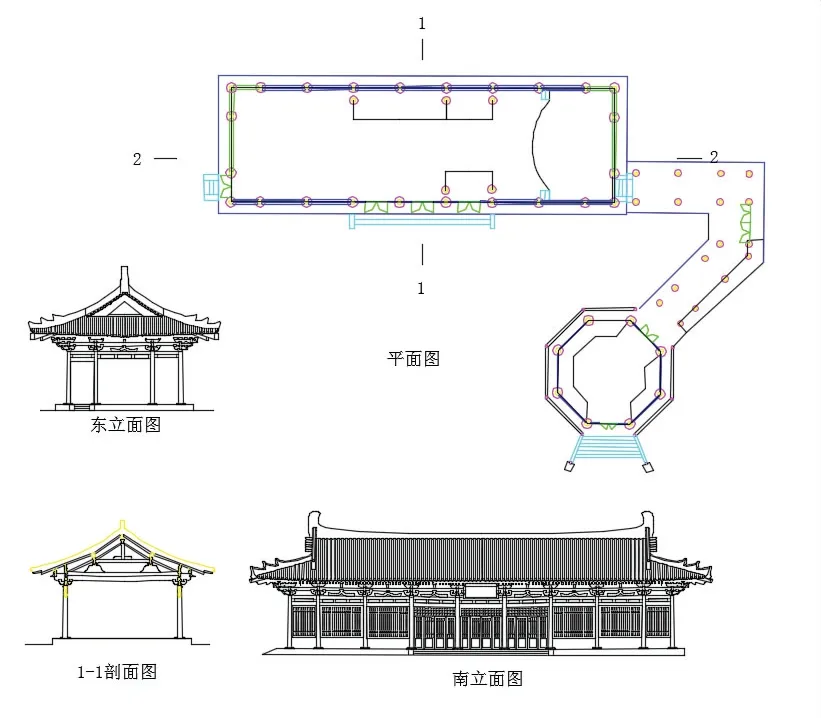
图2 部分成果图
3 结语
三维激光扫描仪精度高,速度快,非接触的特点使得其在古建筑测绘中具有传统测绘技术不可比拟的优势。本文利用Z+FIMAGER5010X三维激光扫描仪扫描古建筑的实例,给出了一种高效的古建筑现状测绘的技术流程。
通过古建筑的内外部全面扫描,生成古建筑内外点云模型,然后以点云数据为基础,生成古建筑的平面图与剖面图的正射影像,通过对正射影像的矢量化,得到现状测绘成果。该方法无须在海量的点云数据中提取平面与剖面信息,可极大提高制图效率。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
测绘学报(2018年10期)2018-10-26 06:12:16
测绘工程(2018年3期)2018-03-20 03:05:12
城市勘测(2018年1期)2018-03-15 03:37:02
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
测绘学报(2015年4期)2015-01-14 03:01:28
大地测量与地球动力学(2014年3期)2014-02-13 05:44:02
河南城建学院学报(2014年2期)2014-02-09 03:03:10
地理空间信息(2013年4期)2013-09-28 07:42:12
