
多重分辨率倾斜影像三维集群建模技术
2022-02-22 08:29李丽娟朱超乾顾景强
北京测绘 2022年1期
李丽娟 朱超乾 顾景强
(中国电建集团北京勘测设计研究院有限公司, 北京 100024)
0 引言
倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,其突破了传统航空摄影测量只能进行垂直角度影像获取的局限性,通过在同一飞行平台上搭载多台传感器,同时从“一个垂直、四个倾斜、五个不同”的角度采集影像,获取到丰富的建筑物顶面及侧视的高分辨率纹理。它不仅能够真实地反映地物情况,高精度地获取物方纹理信息,还可通过先进的定位、融合、建模等技术,生成真实的实景模型[1]。随着现代化建设的需求、党中央政策的支持、大数据云平台及计算机集群技术的发展,如何高效地建立倾斜三维模型成了新的研究热点[2]。魏晓琴[3]、张福存等[4]研究了倾斜摄影在大比例尺地形图测绘中的应用及技术要点。周晓敏等[5]研究了倾斜摄影在城市级实景三维模型建设中的应用。王旭科等[6]研究了利用机载载激光雷达和倾斜影像进行互补融合构建城市三维模型的方法。张奇等[7]对比了三维重建几种方式的优缺点,介绍了倾斜摄影测量和三维重建过程中的关键技术及未来的发展趋势。何雁如等[8]论述了如何利用ContextCapture Center软件提供的集群建模技术解决三维自动化建模时遇到的计算资源匮乏问题。从现有的倾斜建模技术和建模软件应用分析,仙居抽水蓄能电站项目面积大、植被茂密且存在大范围水库,因此,建模中容易出现空中三角测量结果扭曲、分层等现象,生产的模型水域部分会出现大范围空洞,同时单机建模效率低,不能满足工期要求。针对以上问题,项目在航飞设计阶段对整个建模区域先进行较低分辨率倾斜摄影,再对重点区域进行高分辨率倾斜摄影;在建模环节中,充分将瞰景Smart3D高效的空三处理优势和ContextCapture Center的集群建模效率高的优势相结合,再利用ModelFun软件对倾斜模型进行道路置平、水面修补、底部碎片及悬浮物删除等修饰工作。该方法不仅提高了生产作业效率,而且取得了良好的建模效果。
1 项目概况及技术路线
浙江仙居抽水蓄能电站是国家“十一五”规划重点建设工程和浙江省重点工程。电站位于浙江省仙居县湫山乡境内,测区植被茂密,山势陡峭,地形分类属于高山地。需要完成倾斜模型建设总面积10.45 km2,总体分辨率不低于5 cm,业主营地、上下水库及环库路等重要区域分辨率不低于2 cm。基于瞰景Smart3D和ContextCapture Center的倾斜建模技术路线如图1所示,主要包括前期准备、数据采集、空三加密、倾斜模型生产、倾斜模型修饰、质量检查6个阶段。
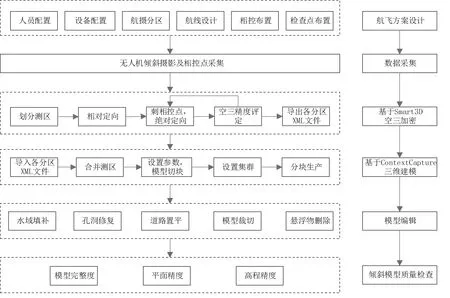
图1 倾斜模型建模技术路线
2 航飞方案设计
前期准备阶段主要包括航飞方案设计和航飞人员、设备配置。航飞设置包括航摄分区、航线设计和像控点布设。结合仙居抽水蓄能电站项目要求和项目区域环境特点,本次航飞采用大疆M600Pro型无人机进行航飞,搭载KG1000五镜头相机进行拍摄,采用上海珞琪软件公司开发的RockyCapture航线规划软件进行地面站的操作。测区为山区,高差较大,为了同时满足最高点重叠度和最低点分辨率的要求,航飞采用地形跟随方式飞行,航飞高度随着地形起伏而变化,设计4.8 cm分辨率,分1~12测区进行航摄,再对重要区域设计1.5 cm分辨率,分13~21测区进行二次拍摄。
为了满足三维模型量测及分析需求,必须将倾斜模型从GPS定位得到的WGS84地理坐标系,转化到与浙江仙居项目一致的投影过后的独立坐标系。须在三维模型区域内布置高精度像片控制点。像控点的布设按照飞行分区采用区域网布点法,隔航线布设,结合项目重点区域精度要求,共计布设42个像控点和72个用于倾斜模型质量检查的检查点。
3 数据采集
数据采集主要包括倾斜影像采集和像控点采集。倾斜摄影按照航拍设计在天气晴朗、能见度高的环境下进行,共计拍摄4.8 cm分辨率影像22 290张,1.5 cm分辨率影像23 025张,共计拍摄航片45 315张;飞行姿态稳定,获取影像清晰、层次丰富,总体质量较好。对获取的航拍像片及POS数据,依次进行有效像片数确定、POS数据编辑、各镜头影像名更改,确保POS信息与5镜头像片数量及信息一一对应,便于后期三维倾斜模型生产。
鉴于此次航飞影像清晰度较高,像控点测量采用直接在航片上选刺的方式进行。选择交角良好的细小线状地物交点、地物折角顶点、影像小于0.2 mm的点状地物中心,且高程变化较小、易于准确定位与量测的明显地物直接影像判刺。采用实时动态载波相位差分(Real Time Kinematic,RTK)技术获取像控点坐标,并按照《低空数字航空摄影测量外业规范》要求做好“点之记”,以方便后续建模内业空三处理中应用。
4 基于Smart3D空中三角测量计算
空中三角测量(简称“空三”)是指解算相机参数、影像位置、姿态以及加密点三维坐标的过程,是倾斜三维建模的关键步骤。整体流程主要包括影像特征点提取与匹配、构建自由网以及加刺控制点绝对定向。目前国内常用的建模软件为是Acute3D公司的Context Capture(简称“CC”)。由于浙江仙居项目的倾斜影像具有多重分辨率、大面积水域的特殊性,常用软件对此类数据解算效果差,易出现空三错乱、分层及大量照片未参与解算。而Smart3D具有测区划分灵活、刺点模式友好、二次平差速度极快、空三解算一次性通过率高等优点。因此,浙江仙居项目采用瞰景科技的Smart 3D平台进行空三解算再导出XML文件到CC中进行建模。其建模主要流程如下:
(1)新建工程及数据导入:在Smart3D中新建工程,导入全部的影像数据及像控点坐标文件,检查定位定姿系统(Position and Orientation System, POS)数据及影像的完整性及正确性。
(2)分区相对定向:依据相邻测区不少于4个公共控制点、单个测区影像数量小于1.5万张的原则,将编号为1~21的航测区域分为block1(4、8、11、21)、block2(,6、10、12、13、14)、block3(1、3、7、9、19、20)及block4(2、5、15、16、17、18)四个测区,Smart3D将利用POS数据分别进行特征点提取、匹配、平差完成相对定向。
(3)分区绝对定向:依据控制点“点之记”文件同时进行5镜头相片的刺点工作,经反复“平差-调整点位-平差”直至解算出精度要求满足规范《数字航空摄影测量中三角测量规范》(GB/T 23236—2009),求出影像的外方位元素,完成绝对定向。
(4)导出各分区的XML成果。
5 集群模式下Context Capture三维建模技术
将Smart3D导出的XML成果导入CC软件中并依次合并,检查各分区接边处是否出现分层或错层等问题。设置建模参数,依据计算机内存大小设置切块大小。ContextCapture软件包含控制台(Master)、设置(Setting)、引擎(Engine)、浏览器(Viewer)几个模块。CC4.4以上版本在基于逻辑并行计算的集群下,由主机的master创建任务并分配建立“先到先行”的工作队列,进行任务分配;Setting是一个中间介质,它主要是帮助Engine指向任务的路径;副机的Engine接收分配的子任务并完成并行计算。其工作模式如图2所示。为该项目配置1台主机9台副机组成建模集群,CC软件在高密度点云基础上全自动构建地物不规则三角网 (Triangulated Irregular Network,TIN)模型,再根据TIN模型形状及位置从影像里选择最合适的纹理进行贴合,分别输出“.3mx”及“.obj”格式的倾斜三维模型。在Viewer中查看其模型效果,如图3所示。
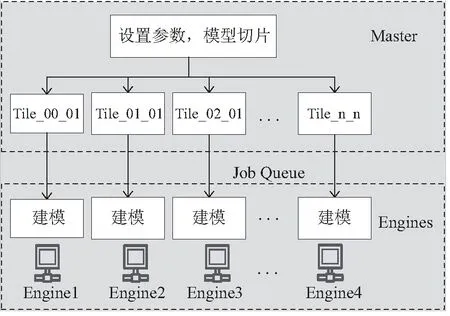
图2 CC集群在倾斜三维建模中的工作模式
6 倾斜模型修饰
倾斜摄影过程中可能存在遮挡、反光、运动、影像落水等情况,在三角网构建过程中引起模型空洞、扭曲、碎片等问题,影响模型的可视化效果,因而,需要将存在缺陷的模型分块借助三维模型编辑软件进行修饰[9]。本文选择ModelFun软件作为模型修饰工具,对已生成的倾斜模型进一步完善。
(1)水域填补:由于测区的蓄能电站上水库面积较大,落水照片近千张,水面特征点少,软件在计算时很难匹配正确,导致输出模型的水面大范围缺失,使计算出的部分水面也存在水面高程异常,空洞、凹陷等情况如图4所示。水面修饰需要对异常的水面进行圈定并删除,随后通过ModelFun的“水面修整”工具提示完成水面修饰,修饰后效果如图5所示。
(2)孔洞修复:由于航拍视角被遮挡,复杂的建筑物、拥有玻璃墙面的建筑物会出现漏洞,如图6矩形框中的模型,利用ModelFun的“立面修整”及“补洞”工具完成结构的修饰,再利用“空三映射”选择影像完成纹理修饰,效果如图7所示。

图6 未修饰前的倾斜模型

图7 ModelFun修饰后的倾斜模型
(3)道路置平:由于路面车辆、行人较多,都是运动状态,导致影像匹配时出现异常,如图6棱形中的模型,利用ModelFun的“道路置平”工具优化道路、桥梁使其尽量平整,再将不符合的纹理部分联动Photoshop软件进行修饰,其效果如图7所示。
(4)悬浮物删除:独立树、点线杆、电线塔、路灯等目前不能通过实景三维建模的形式重建,造成三维模型中存在悬浮物,如图6椭圆形中的模型,利用ModelFun的“删除小物件”工具一键删除细小的碎片及悬浮物,其效果如图7所示。
(5)测区边缘裁切,利用ModelFun的“测区边缘裁切”工具依据浙江仙居项目建模范围进行倾斜模型边缘裁切。
7 倾斜三维模型质量检查
倾斜三维模型质量检查是整个项目重要的一环,建模流程的每个环节都必须进行严格的质量控制,最终反映到模型整体美观性、平面精度和高程精度3个指标上[10]。
浙江仙居项目倾斜模型底部无碎片,上部无悬浮物,数据边缘整齐,纹理整体上无明显色差,道路纹理物明显错位,模型细节层次丰富,结构完整,建模效果良好。满足项目验收要求。
倾斜模型平面精度和高程精度通过量测模型上检查点的三维坐标与外业实测值进行对比,按照均匀分布、重要区域加密采集的原则,共计采集4.8 cm+1.5 cm分辨率范围内检查点30个,4.8 cm分辨率范围内检查点43个,点位包括房角、台阶、路面标示线折角等多类要素,4.8 cm+1.5 cm及4.8 cm分辨率检查点实测坐标和其对应的模型量测坐标精度统计表分别见表1和表2。
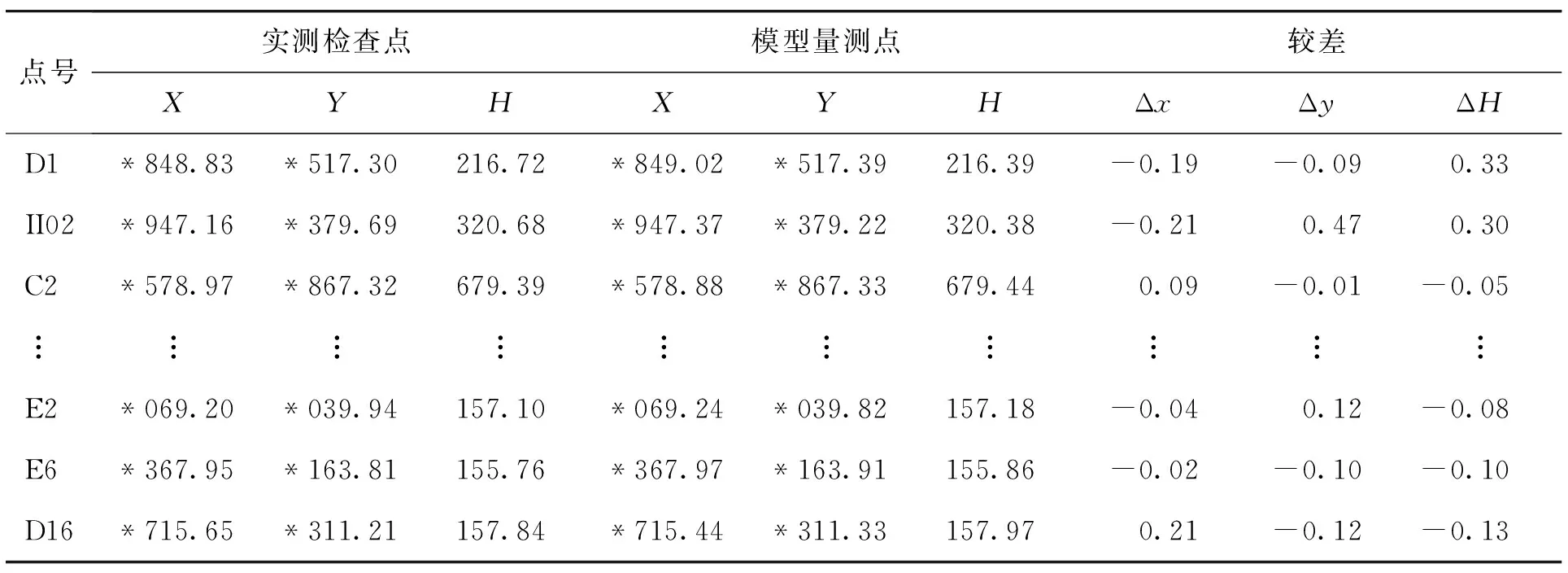
表1 4.8 cm+1.5 cm分辨率范围倾斜模型精度统计表 单位:m

表2 4.8 cm分辨率范围倾斜模型精度统计表 单位:m
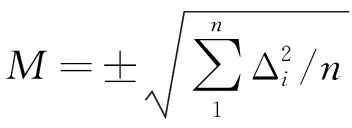
分析表2可知,4.8 cm分辨率区域43个点位,平面X、Y方向最大的点位误差分别为0.75、0.64 m,最小的点位误差均为0.01 m,平面中误差计算为0.35 m,高程误差最大值1.26 m,最小值0.1 m,计算高程中误差值为0.42 m。该测区倾斜三维模型精度符合《三维地理信息模型产品规范》(CH/T9015—2012)相关要求。
8 结束语
(1)本文将Smart 3D平台空三解算出XML文件导入CC中建模,利用了Smart3D测区划分灵活、刺点模式友好、二次平差速度极快、空三解算一次性通过率高及ContextCapture生产的倾斜模型细节层次丰富、结构完整、模型效果良好的优点。
(2)本文利用多台普通PC机实现了基于逻辑并行计算的倾斜三维集群建模技术,提高了生产效率,保证了项目的按时验收。
(3)本文利用ModelFun软件对自动建模中由于遮挡、反光、运动造成模型的空洞、扭曲、碎片等情况进行修饰,在自动建模的基础上优化模型效果。
(4)通过外业实测检查点三维坐标与倾斜模型上量测值进行比较,其平面精度与高程精度均满足《三维地理信息模型产品规范》(CH/T9015—2012)要求,项目成果可以作为基础数据应用于浙江仙居抽水蓄能电站项目规划与设计。
(5)实景三维中国建设是新型基础测绘的主要任务和成果形式,带动“以地理要素为视角和对象”的传统基础测绘向“以地理实体为视角和对象”的新型基础测绘转变。本文总结的技术路线和生产流程为大面积、多广水域、多重分辨率的同类型倾斜建模项目提供借鉴参考和实践经验。
猜你喜欢
今日农业(2022年13期)2022-09-15
科技创新与品牌(2022年4期)2022-05-08
河南科技(2021年35期)2021-04-25
西部资源(2018年1期)2018-11-01
东坡赤壁诗词(2017年3期)2017-07-05
建筑建材装饰(2017年6期)2017-07-04
旅游纵览(2017年3期)2017-03-16
浙江人大(2016年5期)2016-05-14
CHIP新电脑(2016年3期)2016-03-10
建筑工程技术与设计(2015年12期)2015-10-21
